1.本发明涉及一种用于确定车辆的碰撞类型的方法、涉及一种用于执行所述方法的且具有分析和控制单元的传感器装置、还涉及一种相应的计算机程序产品。
背景技术:
2.由现有技术已知一种车辆,其中,所述车辆与障碍物的正面碰撞通过安装在中心气囊控制器中的加速度传感器来检测。在此,对于部分重叠(所谓的“偏置碰撞”)式碰撞的识别难于对于完全重叠式碰撞的识别,因为在这种情况下仅需要褶皱区的部分,因此仅出现很弱的力和很小的加速度。改进对偏置碰撞的识别的一种可能方式是在车辆前端布置所谓的前期传感器,另一种可能方式是在车辆外围侧面、例如在b柱处使用双轴加速度传感器。在那里本来就通常使用沿横向测量的外围加速度传感器(pas:peripheral acceleration sensor)用于探测侧面碰撞,因此两个测量轴线(横向和纵向)的扩充方案仅意味着很低的额外花费。
3.由文献de102009054473a1已知一种用于确定车辆的碰撞类型的方法,该方法基于使用双通道外围加速度传感器,其中所述加速度传感器例如布置在车辆的b柱中并且分别检测沿车辆纵向的第一平移加速度和沿车辆横向的第二平移加速度。
4.在此进行信号预处理,其中例如对由外围加速度传感器提供的信号进行低通滤波。接着进行所述外围传感器的两个单独通道的最终加速度的计算。所述计算基于向量加法。通过对线性不相关的传感器信号进行所述向量加法,可由所述线性不相关的传感器信号算出最终的加速度信号。接着可进行信号预处理、例如借助于积分或求差法,然后实施用于识别所述碰撞类型的后续算法。所述算法可以是具有阈值比较的特殊逻辑。通过所述方法可将车辆与障碍物的完全重叠式正面碰撞与部分重叠式正面碰撞或成角度碰撞区分开。
技术实现要素:
5.用于确定车辆的碰撞类型的方法具有独立权利要求1的特征,用于执行所述方法的且具有分析和控制单元的传感器装置具有独立权利要求15的特征,所述方法和传感器装置均具有下述优点,即,能实现更好地区分不同的偏置碰撞,所述区分允许根据相应情况对防前冲装置的优化操控。这包括相应防前冲系统的气囊的激活时间,同样地,像是“自适应”防前冲装置、比如安全带张紧力限制器和气囊阀的延迟时间或滞后时间。
6.因此,不仅能识别出所谓的odb(偏置可变形障碍)碰撞和成30
°
角度碰撞并将其与完全重叠式碰撞区分开,而且能识别和区分其他偏置碰撞场景,例如具有64km/h和25%重叠的iihs小重叠碰撞、在15
°
角度下具有90km/h壁障速度和35%重叠的nhtsa斜碰撞omdb(偏置移动可变形障碍)、具有各50km/h的车辆速度和壁障速度及50%重叠的euro
‑
ncap mpdb(移动渐进式可变形障碍)。这意味着能够区分不同的偏置碰撞,尤其能够区分车辆前端具有较少横向运动的偏置碰撞(例如偏置可变形障碍)和车辆前端具有较多横向运动的偏置碰撞(例如小重叠)。
7.在不同偏置碰撞之间的区分可通过分析转动加速度的时间变化曲线实现。对应于围绕所述车辆垂直轴线的角速度变化的转动加速度例如可通过居中布置在所述车辆重心区域内的驶偏率传感器重建,或者优选地通过沿纵向在车辆外围侧面测量的加速度的差异重建。在此,在所述车辆的b柱处优选使用外围传感器。然而作为备选方案,也可在a柱或c柱处使用传感器。按照本发明的方法的实施方式以有利方式能实现使用单通道外围加速度传感器,因为为了区分不同的碰撞类型可以仅分析在车辆外围左侧检测的沿车辆纵向的加速度和在车辆右侧检测的沿车辆纵向的加速度。
8.本发明的实施方式提供一种用于确定车辆的碰撞类型的方法,其包括下述步骤:检测所述车辆中至少一个运动信息的至少一条时间变化曲线。由所述至少一个运动信息的至少一条经检测的时间变化曲线确定经处理的旋转运动信息的时间变化曲线。在到达至少一个预设的中断标准之前,通过分析所述经处理的旋转运动信息的时间变化曲线生成至少一个分析信息,和基于所述至少一个分析信息确定所述碰撞类型。
9.此外,提出一种用于车辆的传感器装置,所述传感器装置具有用于检测所述车辆中至少一个运动信息的时间变化曲线的至少一个传感器和接收所述至少一个运动信息的经检测的时间变化曲线的分析和控制单元,所述分析和控制单元构造用于执行按照本发明的用于确定所述车辆的碰撞类型的方法的步骤。
10.对于所述车辆中的至少一个运动信息的经检测的时间变化曲线的算法分析有利的是,对经测量的运动信号进行信号处理,例如低通滤波、带通滤波、积分、二重积分、求导等并且使用经处理的运动信息。
11.所述分析和控制单元在此可理解为电子仪器、比如控制器、尤其是气囊控制器,其处理或分析经检测的传感器信号。所述分析和控制单元可具有至少一个接口,其可按照硬件和/或软件方式构造。在按照硬件方式构造的情况下,所述接口例如为所谓的系统asic(专用集成电路),其包含所述分析和控制单元的各种功能。然而也可行的是,所述接口是自身的集成电路或者至少部分地由分立的构件组成。在按照软件方式构造的情况下,所述接口是软件模块,其例如与其他软件模块一起存在于微控制器中。此外有利的是一种具有程序代码的计算机程序产品,其存储在可机读的载体中、比如半导体存储器、硬盘存储器或光学存储器,从而当在分析和控制单元中执行程序时,执行所述分析。
12.通过在独立权利要求中记载的措施和改进方案能实现对在独立权利要求1中给出的用于确定车辆的碰撞类型的方法的有利改进和在独立权利要求16中给出的用于车辆的传感器装置的有利改进。
13.尤其有利的是,由所述至少一个运动信息的至少一条经检测的时间变化曲线确定经处理的平移运动信息的时间变化曲线,额外地对其进行分析以便生成所述至少一个分析信息。在此,为了生成所述至少一个分析信息,分析经组合的运动信息的时间变化曲线,其通过所述经处理的旋转运动信息的时间变化曲线与所述经处理的平移运动信息的时间变化曲线的组合而生成。优选地,所述经组合的运动信息对应于所述经处理的旋转运动信息与所述经处理的平移运动信息的商。
14.在所述方法的有利的技术方案中,在确定所述碰撞类型的情况下识别出所述车辆与障碍物的碰撞是完全重叠式正面碰撞,或者是整体转动式偏置碰撞,或者是具有较大横向分量的偏置碰撞,或者是具有较大横向分量且与障碍物钩卡的偏置碰撞。如此例如可识
别出所述碰撞发生在车辆哪侧,并且可识别出所述车辆与所述障碍物是成角度碰撞还是正面碰撞,所述障碍物例如为路障或其他车辆,并且在这种情况下可识别出存在完全重叠或部分重叠并且在这种情况下可识别出发生逆时针转动或顺时针转动。
15.在所述方法的其他有利的技术方案中,所述至少一个预设的中断标准对应于阈值标准。在此,第一中断标准例如可对应于加速度标准,当经检测的和/或经处理的加速度信息达到或超过预设的第一阈值时,所述加速度标准得以满足。第二中断标准例如可对应于时间标准,当超过预设的时间窗时,所述时间标准得以满足。
16.在所述方法的其他有利的技术方案中,经检测的第一运动信息对应于在所述车辆的重心的区域中居中地围绕所述车辆垂直轴线的经检测的转速,并且经检测的第二运动信息对应于沿车辆纵向的经检测的平移加速度信息。对此,所述传感器装置可包括第一传感器,其居中布置在所述车辆的重心区域内并且检测围绕所述车辆垂直轴线的转速作为第一运动信息。此外,居中布置在所述车辆的重心区域内的第二传感器可检测沿车辆纵向的平移加速度信息作为第二运动信息。在此,所述经处理的旋转运动信息的时间变化曲线可由所述第一运动信息确定。所述经处理的平移运动信息的时间变化曲线可由所述经检测的第二运动信息或由经处理的第二运动信息确定,所述经处理的第二运动信息由所述第二运动信息生成。
17.除此以外或作为备选方案,经检测的第三运动信息对应于在所述车辆的外围左侧检测的沿车辆纵向的有效总加速度信息,并且经检测的第四运动信息对应于在所述车辆的外围右侧检测的沿车辆纵向的有效总加速度信息。对此,第一加速度传感器可布置在所述车辆的外围左侧并且可检测沿车辆纵向的有效总加速度信息作为第三运动信息。第二加速度传感器可布置在所述车辆的外围右侧并且可检测沿车辆纵向的有效总加速度信息作为第四运动信息。在此,所述经处理的旋转运动信息的时间变化曲线可通过所述第三运动信息和第四运动信息的组合或通过由所述第三运动信息生成的经处理的第三运动信息和由所述第四运动信息生成的经处理的第四运动信息的组合来确定。所述组合可对应于对所述第三运动信息和所述第四运动信息实施求差法、或对应于对所述经处理的第三运动信息和所述经处理的第四运动信息实施求差法、或对应于对所述第三运动信息和所述第四运动信息实施求比例法、或对应于对所述经处理的第三运动信息和所述经处理的第四运动信息实施求比例法。所述经处理的平移运动信息的时间变化曲线可通过对所述第三运动信息和所述第四运动信息实施求和法或通过对所述经处理的第三运动信息和所述经处理的第四运动信息实施求和法来确定。
18.在所述方法的其他有利的技术方案中,在确定所述碰撞类型的情况下,所述经处理的旋转运动信息或所述经组合的运动信息与至少一个阈值进行比较,以识别出其动态特性并进而识别出所述碰撞类型。
19.在所述方法的优选实施方式中,当所述经处理的旋转运动信息或所述经组合的运动信息未超过预设的正的第一阈值并且未低于预设的负的第二阈值时,所述碰撞类型被识别为完全重叠式正面碰撞。作为备选方案,当所述经处理的旋转运动信息或所述经组合的运动信息超过所述预设的正的第一阈值时,识别为整体转动式左侧偏置碰撞。当所述经处理的旋转运动信息或所述经组合的运动信息低于所述预设的负的第二阈值时,识别为整体转动式右侧偏置碰撞。当所述经处理的旋转运动信息或所述经组合的运动信息首先超过正
的第三阈值然后低于预设的负的第四阈值时,识别为具有较大横向分量的左侧偏置碰撞。当所述经处理的旋转运动信息或所述经组合的运动信息首先低于预设的负的第五阈值然后超过预设的正的第六阈值时,识别为具有较大横向分量的右侧偏置碰撞。当所述经处理的旋转运动信息或所述经组合的运动信息首先超过所述正的第三阈值然后低于所述负的第四阈值接着超过预设的正的第七阈值时,识别为具有较大横向分量且与所述障碍物钩卡的左侧偏置碰撞。当所述经处理的旋转运动信息或所述经组合的运动信息首先低于所述负的第五阈值然后超过所述正的第六阈值接着低于预设的负的第八阈值时,识别为具有较大横向分量且与所述障碍物钩卡的右侧偏置碰撞。
20.在附图中示出了本发明的实施例并且将在下文描述中进行进一步阐述。在附图中,相同的附图标记表示执行相同或相似功能的部件或元件。
附图说明
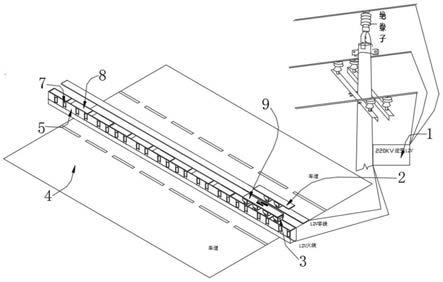
21.图1示出了车辆的示意性框图,所述车辆具有按照本发明的传感器装置的实施例,所述传感器装置具有分析和控制单元且用于执行图2所示的方法。
22.图2示出了按照本发明的用于确定车辆的碰撞类型的方法的实施例的示意性流程图。
23.图3示出了关于第一碰撞类型的经处理的测量信号的不同图表的图示。
24.图4示出了关于第二碰撞类型的经处理的测量信号的不同图表的图示。
25.图5示出了关于第三碰撞类型的经处理的测量信号的不同图表的图示。
26.图6示出了关于第四碰撞类型的经处理的测量信号的不同图表的图示。
具体实施方式
27.如由图1所示可以看出,所示按照本发明的用于车辆1的传感器装置10的实施例包括至少一个传感器14、14l、14r,用于检测车辆1中至少一个运动信息dr、210、212、213的时间变化曲线,还包括分析和控制单元12,其接收所检测的至少一个运动信息dr、210、212、213的时间变化曲线。所述分析和控制单元12用于执行下文中参照图2至图6描述的、用于确定车辆1的碰撞类型的方法100的步骤。
28.如由图1进一步所示可以看出,所述传感器装置10在所示实施例中包括第一传感器14a,其居中布置在所述车辆1的重心sp的区域内并且是驶偏率传感器,所述驶偏率传感器检测围绕所述车辆垂直轴线z的转速作为第一运动信息dr。在此,所述第一运动信息dr涉及在数学上为正的逆时针转动或者以虚线示出的在数学上为负的顺时针转动。此外,居中布置在所述车辆1的重心sp区域内的并且构造为加速度传感器的第二传感器14b检测沿车辆纵向x的平移加速度信息作为第二运动信息210。在所示实施例中,所述两个传感器14a、14b布置在所述分析和控制单元12中。作为备选方案,所述两个传感器14a、14b也可布置在所述分析和控制单元12以外。
29.除此以外或者作为构造为驶偏率传感器的第一传感器14a和构造为加速度传感器的第二传感器14b的备选方案,优选沿纵向x提供用于检测运动信息212、213的感应式外围加速度传感器14l、14r。因此,所示传感器装置10包括布置在车辆1的外围左侧的第一加速度传感器14l和布置在车辆1外围右侧的第二加速度传感器14r。如由图1进一步所示可以看
出,在所述传感器装置10的所示实施例中,所述两个外围加速度传感器14l、14r是双通道加速度传感器。在此,所述第一加速度传感器14l检测沿车辆纵向x的有效总加速度信息作为第三运动信息212和沿车辆横向y的有效总加速度信息,其在此不进一步分析并且包括在车辆左侧沿y方向的旋转加速度分量218。所述第二加速度传感器14r检测沿车辆纵向x的有效总加速度信息作为第四运动信息213和沿车辆横向y的有效总加速度信息,其在此不进一步分析并且包括在车辆左侧沿y方向的旋转加速度分量219。由于在所示实施例中仅使用沿x方向的加速度分量用于分析,因此所述两个加速度传感器14l、14r也可是沿x方向取向的单通道加速度传感器。
30.刚体或车辆1的运动可分解为车辆1的重心sp的平移和在车辆1的重心sp处围绕车辆垂直轴线z的转动。若限制为平面内的运动,那么所述平移可通过在该x/y平面(x:纵向,y:横向)内的加速度向量来表征。由于所述第二传感器14b离车辆重心sp近,因此所述第二传感器基本上测量所述有效平移加速度作为第二运动信息210。所述围绕重心sp的转动通过围绕车辆垂直轴线z的转动向量或转速来表征,所述转速由第一传感器14a检测。在由于碰撞发生转动的情况下,角加速度、即围绕所述车辆垂直轴线z的转动向量或转速的时间导数才是权威的。所述第一运动信息dr的时间导数被检测为围绕所述车辆垂直轴线z的转动向量或转速并且对应于转动加速度,通过处理、比如过滤等可由所述转动加速度生成经处理的旋转运动信息fear。除了测量部位的以向量r表示的转动点或重心sp以外,所述角加速度通过沿切向示出的转动加速度214、215表明。这在图1中示出为在数学上为正的车辆1围绕车辆垂直轴线z的逆时针转动,比如所述车辆垂直轴线例如在左侧偏置碰撞的情况下出现整体转动。
31.借助于在所述车辆外围侧面的两个加速度传感器14l、14r,表明所述转动加速度214、215朝向以角度α相对于纵向x倾斜的方向。在此,α表示所述重心sp和相应的加速度传感器14l的连线与沿横向y经过重心sp的虚线之间的角度。现在有代表性的是,所述转动加速度214、215的沿x方向作用的转动加速度分量216、217在车辆两侧朝向不同方向。在所示碰撞示例中,在车辆1的左侧为沿碰撞方向的加速度分量216,在车辆1的右侧为沿碰撞方向反向的加速度分量217。此外,沿x方向作用的转动加速度分量216、217小于向量化的转动加速度214、215,并且系数为cos(α)。然而,如果传感器轴线力重心sp较近、例如位于b柱处,那么角度α较小并且几乎全部转动加速度214、215沿x方向可见。
32.现在,所述转动与车辆1沿x方向的平移加速度210叠加,所述平移加速度在正面碰撞的情况下指向后方并且在车辆中(在褶皱区以外)的所有部位大小相似。因此,在所示示例中,在车辆左侧,所述平移加速度210和所述沿x方向作用的转动加速度216指向后方并且结构性地叠加。在车辆右侧,所述沿x方向作用的转动加速度217沿与所述平移加速度210相反的方向在x方向上指向前方。因此,通过按照公式(1)的求差法,由在车辆左侧测量的沿x方向作用的总加速度信息212或在车辆右侧测量的沿x方向作用的总加速度信息213得出沿x方向作用的转动加速度216、217。
33.216=
‑
217=(212
‑
213)/2
ꢀꢀꢀꢀꢀ
(1)
34.反之,通过按照公式(2)的求和法得到所述沿x方向的平移加速度分量210。
35.210=(212 213)/2
ꢀꢀꢀꢀꢀ
(2)
36.如由图2至图6进一步所示可以看出,按照本发明的用于确定车辆1的碰撞类型的
方法100的所示实施例包括步骤s100,在该步骤中,检测所述车辆1中的至少一个运动信息dr、210、212、213的至少一条时间变化曲线。在步骤s110中,由所述至少一个加速度信息dr、212、213的至少一条经检测的时间变化曲线确定经处理的旋转运动信息fear的时间变化曲线。在此,所述至少一个运动信息dr、212、213例如可用于低通滤波、带通滤波、积分、二重积分、求导等处理。在步骤s120中,在达到至少一个预设的中断标准之前,通过分析所述经处理的旋转运动信息fear生成至少一个分析信息。在步骤s130中,基于所述至少一个分析信息确定所述碰撞类型。
37.在步骤s130中,在确定所述碰撞类型的情况下识别出所述车辆1与障碍物h的碰撞涉及完全重叠式正面碰撞或者涉及整体转动式偏置碰撞或者涉及具有较大横向分量的偏置碰撞或者涉及具有较大横向分量且与障碍物h钩卡的偏置碰撞。
38.在所示实施例中,在步骤s110中,由所述至少一个运动信息210、212、213的至少一条经检测的时间变化曲线确定经处理的平移运动信息feat的时间变化曲线,额外地对其进行分析以便生成所述至少一个分析信息。因此在步骤s120中,为了生成所述至少一个分析信息,分析经组合的运动信息fean的时间变化曲线,其通过所述经处理的旋转运动信息fear的时间变化曲线与所述经处理的平移运动信息feat的时间变化曲线的组合而生成。所述经组合的运动信息fean优选通过求所述经处理的旋转运动信息fear与所述经处理的平移运动信息feat的商来生成。
39.在所示实施例中,在步骤s120中将两个阈值标准用作预设的中断标准。在此,第一中断标准对应于加速度标准,当经检测的和/或经处理的加速度信息达到或超过预设的第一阈值时,所述加速度标准得以满足。如此,所述经检测的沿x方向的平移加速度210例如可被合计。第二中断标准对应于时间标准,当超过预设的时间窗tf时,所述时间标准得以满足。当然,在备选方案中也可与所示实施例不同地使用其他合适的中断标准或使用多个中断标准的组合或仅使用一个中断标准。
40.如上所述地,所述经检测的第三运动信息212对应于沿车辆纵向x在车辆1左侧检测的有效总加速度信息,而所述经检测的第四运动信息213对应于沿车辆纵向x在车辆1右侧检测的有效总加速度信息。在所示实施例中,通过借助于低通滤波、带通滤波、积分、二重积分、求导等方式处理所述第三运动信息212和所述第四运动信息213来生成经处理的第三运动信息fealx和经处理的第四运动信息fearx。在此,在所示实施例中,所述经处理的转动加速度信息fear的时间变化曲线按照公式(3)通过由所述经处理的第三加速度信息fealx并且由所述经处理的第四加速度信息fearx进行求差而确定。所述经处理的平移加速度信息feat的时间变化曲线按照公式(4)通过由所述经处理的第三加速度信息fealx和所述经处理的第四加速度信息fearx进行求和而确定。
41.fear=fealx
‑
fearx
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
42.feat=fealx fearx
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
43.在备选方案中,与所示实施例不同地,所述经处理的转动加速度信息fear按照公式(5)可由所述经处理的第三运动信息fealx与所述经处理的第四运动信息fearx的第一商确定或者按照公式(6)可由所述经处理的第四运动信息fearx与所述经处理的第三运动信息fealx的第二商确定,并且可用于生成所述至少一个分析信息。在不发生转动的碰撞的情况下,即,在fealx大约相当于fearx的情况下,那么认为所述经处理的转动加速度信息fear
具有约为1的数值。在发生转动的碰撞的情况下,认为所述经处理的转动加速度信息fear具有明显高于或低于1的数值。
44.fear=fealx/fearx
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
45.fear=fearx/fealx
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
46.如上所述地,所述经检测的第一运动信息dr对应于在车辆1的重心sp区域中居中检测的围绕车辆垂直轴线z的转速。所述经检测的第二运动信息210对应于所述经检测的沿车辆纵向x的平移加速度信息。因此,除此以外、例如为了所述测量结果的合理性,或者作为备选方案,所述经处理的旋转运动信息fear的时间变化曲线可由所述第一运动信息dr确定。除此以外或作为备选方案,所述经处理的平移加速度信息feat的时间变化曲线可由所述经检测的第二运动信息210确定。
47.在所示实施例中,所述经组合的运动信息fean按照公式(7)由所述经处理的旋转运动信息fear与所述经处理的平移运动信息feat的商确定并且用于生成所述至少一个分析信息。
48.fean=fear/feat
ꢀꢀꢀꢀꢀ
(7)
49.在另一未示出的实施例中,为了生成所述至少一个分析信息,使用所述经处理的旋转运动信息fear的时间变化曲线和所述经处理的平移运动信息feat的时间变化曲线。
50.在所示实施例中,在确定所述碰撞类型的情况下,所述经组合的运动信息fean与至少一个阈值s1、s2、s3、s4、s5、s5、s6、s7、s8进行比较,以便识别出其动态特性进而识别出所述碰撞类型。在备选方案中,不同于所示实施例地,所述经处理的旋转运动信息fear和所述经处理的平移运动信息feat分别与至少一个阈值进行比较,以便识别出其动态特性进而识别出所述碰撞类型。
51.所述方法100例如可通过软件或硬件或软硬件混合形式实现、例如通过分析和控制单元12实现。在此,所述方法可作为具有程序代码的计算机程序产品存储在可机读的载体中并且由所述分析和控制单元12执行。
52.接着参照图3至图6根据上述信号特征区分不同的碰撞场景,以优化相应防前冲装置的激活。
53.图3示出所述车辆1与障碍物h的完全重叠式且无角度的碰撞。在此仅存在较弱的转动加速度分量,其表现为所述经处理的第三运动信息fealx与所述经处理的第四运动信息fearx的几乎一致的信号特征,它们几乎仅反映出所述经处理的平移运动信息feat。因此,所述经处理的旋转运动信息fear和所述经组合的运动信息fean非常少。
54.这种情况例如可在下述情况下被识别出,即,所述经组合的运动信息fean或所述经处理的旋转运动信息fear未超过预设的正的第一阈值s1和预设的负的第二阈值s2,其中,所述第一阈值s1和所述第二阈值s2可具有不同值。在所示实施例中,所述经组合的运动信息fean与所述两个阈值s1、s2进行比较。有意义的是,对于所述经处理的旋转运动信息可设想相似的阈值。
55.图4示出左侧偏置碰撞,其中,所述车辆持续地围绕冲击点沿在数学上为正的方向围绕车辆垂直轴线z逆时针旋转。这样的方法例如可应用于odb(偏置可变形障碍)或有偏置的柱碰撞的情况。如由图4所示可以看出,在所示左侧偏置碰撞的情况下,所述经处理的第三运动信息fealx大于所述经处理的第四运动信息fearx,并且所述经处理的旋转运动信息
fear和所述经组合的运动信息fean具有明显不同于零的数值。所述经处理的旋转运动信息fear通常在碰撞过程中增长,而在分母中的所述归一的经组合的运动信息fean由于所述同样增长的经处理的平移运动信息feat符合趋势地具有恒定数值。
56.这种情况例如可在下述情况下被识别出,即,所述经组合的运动信息fean或所述经处理的旋转运动信息fear超过所述预设的正的第一阈值s1。在所示实施例中,所述经组合的运动信息fean与所述第一阈值s1进行比较。作为识别所述碰撞类型的其他条件所要求的是,所述经组合的运动信息fean不发生符号改变。如有必要也可允许短暂的符号改变,只要未超过下文所述的任一阈值s4、s5、s8。在右侧碰撞的情况下,上述各作用互换,并且所述经处理的第四运动信息fearx大于所述经处理的第三运动信息fealx。因此,所述经处理的旋转运动信息fear和所述经组合的运动信息fean具有负号。这样的整体转动式右侧偏置碰撞在所示实施例中相应地在下述情况下被识别出,即,所述经组合的运动信息fean低于所述负的第二阈值s2。
57.图5示出具有较大横向分量的左侧偏置碰撞或成角度碰撞。这种特性例如可在30
°
的成角度碰撞情况下出现。由于所述左侧碰撞,从初始至第一时刻t1出现在数学上为正的围绕车辆垂直轴线z的逆时针转动,其中,所述经处理的第三运动信息fealx大于所述经处理的第四运动信息fearx,以及所述经处理的旋转运动信息fear和所述经组合的运动信息fean大于零。但如果车厢前端现在由于左侧障碍物h在后续过程中被推向右,那么由此在所述第一时刻t1之后,出现在数学上为负的围绕车辆垂直轴线z的顺时针转动,其中,所述经处理的第三运动信息fealx小于所述经处理的第四运动信息fearx,以及所述经处理的旋转运动信息fear和所述经组合的运动信息fean小于零。图5的图示示出所述车辆1在所述第一时刻t1不久之后的情况,在该第一时刻,所述经处理的运动信息fealx等于所述经处理的第四运动信息fearx,或者在该第一时刻,所述经处理的旋转运动信息fear和所述经组合的运动信息fean均等于零或者分别交换其符号。
58.这种情况例如可在下述情况下被识别出,即,所述经组合的运动信息fean或所述经处理的旋转运动信息fear首先超过预设的正的第三阈值s3,然后接着低于负的第四阈值s4,其中所述第三阈值s3和第四阈值s4可具有不同值。在所示实施例中,所述经组合的运动信息fean与所述两个阈值s3、s4进行比较。作为特殊情况,所述第四阈值s4也可选择数值“零”,那么基于所述经组合的运动信息fean在其首先已超过所述正的第三阈值s3之后的符号改变,识别出所述碰撞类型。这种整体转动式右侧偏置碰撞在所示实施例中相应地在下述情况下被识别出,即,所述经组合的运动信息fean首先低于预设的负的第五阈值s5,然后接着超过正的第六阈值s6,其中所述第五阈值s5和第六阈值s6可具有不同值。
59.最后,图6示出具有较大横向分量的左侧偏置碰撞或成角度碰撞,其中,在后续碰撞过程中,例如由于“钩住”障碍物h发生围绕所述障碍物h的转动。这种特性例如可在成30
°
角度碰撞的情况下或者在小重叠测试的情况下出现。由于所述左侧碰撞,从初始至第一时刻t1出现在数学上为正的围绕车辆垂直轴线z的逆时针转动,其中,所述经处理的第三运动信息fealx大于所述经处理的第四运动信息fearx,以及所述经处理的旋转运动信息fear和所述经组合的运动信息fean大于零。但如果车厢前端现在由于左侧障碍物h在后续过程中被推向右,那么由此在所述第一时刻t1之后直至第二时刻t2,出现在数学上为负的围绕车辆垂直轴线z的顺时针转动,其中,所述经处理的第三运动信息fealx小于所述经处理的第
四运动信息fearx,以及所述经处理的旋转运动信息fear和所述经组合的运动信息fean小于零或者交换其符号。接着,由于钩住所述障碍物h,又出现在数学上为正的围绕车辆垂直轴线z的逆时针转动,其中,在所述第二时刻图t2之后,所述经处理的第三运动信息fealx大于所述经处理的第四运动信息fearx,以及所述经处理的旋转运动信息fear和所述经组合的运动信息fean大于零或者重新交换其符号。图6的实线图示出所述车辆1在所述第一时刻t1不久之后的情况,在该第一时刻,所述经处理的第三运动信息fealx等于所述经处理的第四运动信息fearx,或者在该第一时刻,所述经处理的旋转运动信息fear和所述经组合的运动信息fean均等于零或者分别交换其符号。图6的虚线图示出所述车辆1在所述第二时刻t2不久之后的情况,在该第二时刻,所述经处理的第三运动信息fealx又等于所述经处理的第四运动信息fearx,或者在该第二时刻,所述经处理的旋转运动信息fear和所述经组合的运动信息fean均等于零或者分别重新交换其符号。
60.这种情况例如可在下述情况下被识别出,即,所述经组合的运动信息fean或所述经处理的旋转运动信息fear首先超过预设的正的第三阈值s3,然后接着低于负的第四阈值s4,然后接着超过正的第七阈值s7。在此,所述第三阈值s3、所述第四阈值s4和所述第七阈值s7可具有不同值。在所示实施例中,所述经组合的运动信息fean与所述阈值s3、s4、s7进行比较。这种具有较大横向分量的右侧偏置碰撞或成角度碰撞在后续碰撞过程中例如由于“钩住”障碍物h发生围绕所述障碍物h的转动,这种碰撞在所示实施例中相应地可在下述情况下被识别出,即,所述经组合的运动信息fean首先低于所述预设的负的第五阈值s5,接着超过所述正的第六阈值s6,然后低于负的第八阈值s8,所述第八阈值在数值上可对应于所述正的第七阈值s7。在此,所述第五阈值s5、所述第六阈值s6和所述第八阈值s8可具有不同值。
61.所有给出的阈值s1、s2、s3、s4、s5、s5、s6、s7、s8可以是恒定的或者也可在碰撞过程中例如作为时间或速度减低的函数发生变化。
62.也可基于所述经处理的旋转运动信息fear和/或所述经组合的运动信息fean进行组合式特征分析。图5的场景例如也可通过对所述经处理的旋转运动信息fear和所述经组合的运动信息fean进行逻辑与运算被识别出。图6的场景例如也可通过对所述经处理的旋转运动信息fear和所述经组合的运动信息fean进行逻辑或运算被识别出。此外,所述阈值检测还与时间条件相结合,从而例如在一定的时间间隔内的相应的阈值条件必须相继发生。
63.同样地,也可分析如上所述的所述经处理的第三运动信息fealx与所述经处理的第四运动信息fearx的第一商或者如上所述的所述经处理的第四运动信息fearx与所述经处理的第三运动信息fealx的第二商,对此在上文示例中不再详细深入描述。但是显然,所述多个商在非偏置的情况下具有近似1的数值,在该情况下,所述经处理的第三运动信息fealx大约相当于所述经处理的第四运动信息。在转动时,所述多个商根据方向具有高于或低于1的数值。为此设置简单的、相应的阈值序列。
64.鉴于所描述的场景的乘客运动学,各场景互不相同,因此所述不同的场景的不同防前冲策略是有利的。因此,所述防前冲系统的部件的激活限阈可与经识别的碰撞类型相匹配,以优化激活防前冲装置、比如安全带、气囊等的时刻。此外,对自适应防前冲装置、比如安全带张紧力限制器和自适应气囊阀的控制可与经识别的碰撞类型相匹配。此外,与经
识别的碰撞类型相关地,侧向头部安全气囊在偏置情况下可在所述车辆的碰撞侧和/或与碰撞相背的侧爆出。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。