1.本公开整体涉及感测物体放置在活体内的位置,并且具体地涉及对探头在活体中的位置感测期间所经历的伪影的检测和补偿。
背景技术:
2.宽泛的医学规程范围涉及将物体(诸如传感器、管、导管、分配装置和植入物)设置在体内。已经开发出位置感测系统来跟踪此类物体。例如,授予wittkampf的美国专利第5,983,126号描述了使用电阻抗方法检测导管位置的系统,该专利的公开内容以引用方式并入本文。授予govari等人的美国专利申请公开2006/0173251以及授予osadchy的2007/0038078描述了通过使电流在探头上的电极与身体表面上的多个位置之间流过身体来感测探头的位置的方法。这些方法同样在感测探头位置时使用身体的电阻抗。
3.当使用基于阻抗的测量技术来确定探头(例如,导管)的位置时,已经发现,如果不将探头图像限制为呈现实际形状和位置,则可发生突然的波动,这会扰乱正在查看患者监护仪的医师。美国专利申请公开2008/0009711描述了当使用此类测量技术时通过稳定探头的显示图像来增强探头的可视化的方法,该专利的公开内容以引用方式并入本文。
技术实现要素:
4.本文公开了用于医学规程的方法、设备和系统,所述方法、设备和系统用于:接收受检者的身体内的探头的相应多个位置转换器的多个测量坐标的输入;接收由所述探头输出的测量电压测量值;基于与所述测量坐标相比的所述探头的已知机械特性的模型并且进一步基于与所述测量电压测量值相比的预期电压值来确定与所述探头在所述身体内可以呈现的形状相关的成本函数;基于所述成本函数来选择形状;基于所述形状来生成沿着所述探头的点的校正坐标;以及使用所述校正坐标来显示所述探头的表示。
附图说明
5.结合附图以举例的方式给出的以下描述可得到更详细的理解,其中:
6.图1是根据所公开的主题的具体实施的位置感测系统的示意性图示;
7.图2a是根据所公开的主题的具体实施的偏离其自由形状的fls探头的示意性侧视图;
8.图2b是示意性地示出根据所公开的主题的具体实施的偏离其自由形状的探头的模型几何形状的图;
9.图2c是示出根据所公开的主题的具体实施的作为导管的一部分的多个fls探头的图;
10.图3是示意性地示出根据所公开的主题的具体实施的探头可视化系统的细节的图;
11.图4是示出根据所公开的主题的具体实施的探头可视化方法的流程图;并且
12.图5是示出根据所公开的主题的具体实施的成本函数计算方法的流程图。
具体实施方式
13.所公开主题的具体实施使得医疗专业人员能够通过将探头的机械特性的模型应用于从探头上的点接收的表观坐标来使受检者的身体中的柔性探头(例如,柔性磁性环路传感器(fls)更准确地可视化。处理器首先将探头的已知机械特性的模型应用于表观坐标,以便计算关于探头在身体内可呈现的形状的成本函数。然后处理器响应于成本函数选择探头的形状,然后基于该形状来生成沿探头长度的点的一组校正坐标。使用校正坐标,可显示探头的更准确的表示。
14.传统的基于磁性的位置检测系统利用导管(例如,标测导管)上的传感器结合算法,以基于由传感器取得的电压测量值来估计导管的位置和形状。此类估计例如公开于授予osadchy的美国专利8,478,379中,该专利以引用方式并入本文。
15.根据所公开主题的具体实施,导管可包括若干柔性磁性环路传感器(fls)。当fls传感器位于患者身体内时,fls可感测例如9个发射器的场,这导致每个fls传感器在单个点处总共取得9个测量值(即,9
×
1=9)。例如,对于具有3个环路的导管,可以通过将传感器导线添加到三个环路而将三个fls环路放置在导管周围。
16.导管力学算法可定义导管的参数,诸如图2a所示的fls环路导管。该算法结合了预先已知的特性,诸如导管的形状、其弯曲性和/或柔韧性、其各个部分的长度等。可将导管的特性与基于传感器的位置和/或取向取得的实际测量值进行比较。基于导管特性和实际测量值,可创建成本函数,如本文进一步公开的。
17.成本函数的第一项(位置误差)可以是基于导管的当前估计形状的传感器的估计位置和/或取向与来自那些传感器的实际测量值之间的差值。可使这一差值最小化,以获得估计位置与位置的实际测量值之间的最佳匹配。导管力学算法可用于估计导管在空间中的形状和位置,使得其基于导管的参数限定每个传感器在空间中的位置。成本函数是位置与那些位置的实际测量值之间的误差。形状与实际测量值的最佳匹配将使成本函数最小化,使得获得具有最低可能值的最低成本函数。
18.成本函数的第二项(力学或变形)包括导管变形的成本。当变形最小化时,所得导管将具有预定形状(例如,其将为fls导管的环路)。包括导管变形的这一第二项可防止导管力学算法生成非常变形的导管形状,以便匹配来自传感器的嘈杂或错误测量值。
19.成本函数的第一项和第二项的输入包括与已知导管参数进行比较的给定传感器的位置和取向。根据所公开的主题的具体实施,导管力学算法的附加输入包括嵌入导管中的fls环路的电压测量值。可从作为fls环路或其他探头的一部分或它们外部的电压接触部感测电压测量值。虽然为了简单起见本文提供的公开内容涉及单个fls环路,但是应当理解,相同的公开内容可以应用于具有多个fls环路的导管(例如,图2c中的导管)。
20.根据所公开主题的具体实施,可将导管(例如,fls环路导管)插入患者身体内(例如,心腔中)。在给定位置处生成的磁场可基于任何适用的技术诸如经由位于患者身体下方或附近的定位垫、由身体贴片、校准数据等或它们的组合而为已知的。因此,在导管(例如,fls环路导管)处接收的预期磁场可能是已知的。导管力学算法可应用预期磁场以基于当前估计的导管形状计算来自嵌入导管中的任何fls环路的预期电压测量值。为了清楚起见,可
将在导管的位置处生成的已知磁场(例如,由定位垫校准数据确定)应用到导管的估计形状,以确定来自导管的fls环路的预期电压。此外,还可基于fls环路的电压读数来接收导管的fls环路处的测量电压。测量电压可由作为fls环路的一部分或fls环路外部的电压接触部测量。
21.可将测量电压(例如,来自电压接触部)与预期电压之间的差值加到第一项和第二项成本函数,使得成本(形状,位置)=位置误差 力学(变形) 磁误差(电压差)。通过使成本函数最小化,导管力学算法可确定与位置传感器和fls电压测量值具有最佳匹配的导管位置和形状,同时考虑导管的机械特性。每个fls环路提供多个(例如,9个)测量值,这些测量值在自由度方面可等同于3个精确电流位置(acl)位置传感器。
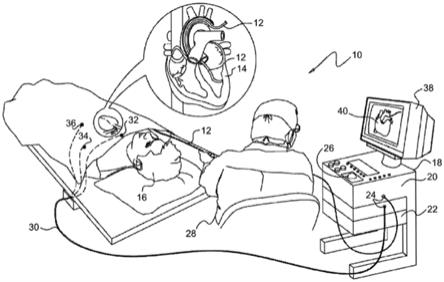
22.图1是根据公开的主题构造和操作的位置感测系统10的图示。系统10用于确定柔性探头12(诸如fls导管)的位置,该柔性探头插入内部体腔,诸如受检者16的心脏14的心室。通常,探头12用于诊断处理或治疗处理,诸如标测心脏14中的电势或执行对心脏组织的消融。探头12或其它体内装置可以替代地通过自身或与其它治疗装置结合用于其它目的。探头12的远侧末端包括一个或多个电极(图2a)。这些电极通过穿过探头12的插入管的导线(未示出)连接至控制单元18中的驱动电路系统,如本文所述。
23.控制单元18通过穿过缆线30的导线连接到体表电极,该体表电极通常包括粘性皮肤贴片32、34和36。在本发明的另选实施方案中,体表上的电极可在数量上变化并且可采用其他形式,诸如皮下探头或由医疗专业人员28操作的手持装置。可将贴片32、34和36放置在邻近探头12的体表上的任何方便位置。例如,对于心脏应用,通常将贴片32、34和36放置在受检者16的胸部周围。关于贴片相对于彼此或相对于身体坐标的取向没有特别的要求,但如果贴片是间隔开的而不是聚集在一个位置,则可实现更高的准确性。不要求贴片沿着固定轴放置。因此,可确定贴片布置,以便尽可能少地干扰所执行的医学规程。
24.控制单元18基于在探头12与贴片32、34、36之间测量的阻抗来确定探头12在心脏14内的位置坐标。另外,控制单元18基于探头12的位置处的磁场来接收由探头12的环路生成的电压值。控制单元18驱动显示器38,该显示器显示探头12在受检者16内的位置。探头12可用于生成心脏的标测图40。探头12的位置可叠加在标测图40或心脏的另一图像上。
25.控制单元18是包括处理器(诸如中央处理器(cpu)20)的计算机系统,该处理器在软件中编程以执行本文所述的功能。控制单元18还包括用于存储应用程序和数据的磁性或基于半导体的存储装置22。数据i/o通信接口24使得控制单元18能够与探头12和贴片32、34、36进行交互。医疗专业人员28经由一组输入装置26控制对控制单元18的操作。
26.应当理解,虽然为简单起见公开了单个给定部件(例如,控制单元18、存储装置22等),但可使用多个此类部件来实现所公开的主题。例如,第一控制单元18可确定探头12在心脏12内的位置坐标,并且第二控制单元18可接收由探头12的环路生成的电压值。
27.虽然图1示出了具体的系统配置,但也可采用其他系统配置来实施本发明的实施方案,并因而被视为在本发明的精神和范围内。例如,本文所述的方法可应用于校正使用其他类型的位置转换器(诸如磁性位置传感器或超声位置传感器)取得的位置测量值。如本文所用,术语“位置转换器”是指安装在探头上的元件,该元件使得控制单元18接收指示元件坐标的信号。因此,位置转换器可以包括探头上的接收器,该接收器基于由转换器接收到的能量来向控制单元生成位置信号;或者该位置转换器可包括发射器,该发射器发射由探头
外部的接收器感测的能量。此外,类似地,本文所述的方法不仅可应用于可视化导管的位置,而且可应用于可视化心脏中以及其他身体器官和区域中的其他类型的探头的位置。
28.附图中的流程图和框图示出了根据本发明的各种实施方案的系统、方法和计算机程序产品的可能具体实施的架构、功能和操作。就这一点而言,流程图或框图中的每个框可表示代码的模块、部段或部分,该代码包括用于实现指定逻辑功能的一个或多个可执行指令。还应当指出的是,在一些替代具体实施中,框中指出的功能可不按附图中指出的顺序发生。例如,取决于所涉及的功能,连续示出的两个框实际上可基本上同时执行,或者框有时可以以相反的顺序执行。还应当注意,框图和/或流程图图示中的每个框以及框图和/或流程图图示中的框的组合可通过执行指定功能或动作的基于专用硬件的系统或者通过专用硬件和计算机指令的组合来实现。
29.图2a和图2b是示意性地示出根据本发明实施方案的偏离其自由形状的探头12的图。如图2a和图2b所示,探头12为包括fls环路的fls导管。图2a示出探头12在心脏14中的实际曲率的表示,其中探头12包括电极50、51、52、53、54、55、56、57和58,这些电极在这一具体实施中用作位置转换器。术语“电极”和“转换器”在本文中可互换地用于电极50、51、52、53、54、55、56、57和58,因为它们也可用作转换器。可提供附加电极59,该附加电极可提供关于探头12的基部的位置信息。同样如图2a所示,可提供电压测量区域202,并且该电压测量区域可基于在探头12周围生成的磁场201来指示由探头12生成的电压。电压测量区域202可为电压接触部,诸如导电垫或与例如控制单元18的有线连接,使得由探头生成的电压被提供以分析成本函数,如本文进一步所公开。
30.图2b为计算的探头12的几何模型60的图。电极50、51、52、53、54、55、56、57和58的基于由控制单元18接收到的信号的测量位置分别由点m0、m1、m2、m3、m4、m5、m6、m7和m8表示。另选地或附加地,在磁性位置感测系统中,位置转换器可包括提供位置和完整取向矩阵的三轴磁性传感器(tas)。
31.在模型60中,点e0、e1、e2、e3、e4、e5、e6、e7和e8表示电极50、51、52、53、54、55、56、57和58的基于点m0、m1、m2、m3、m4、m5、m6、m7、m8和m9的测量位置的计算位置。根据本发明的实施方案的成本函数用于找到点e
j
和m
j
之间的最佳匹配。模型60包括由允许旋转(弯曲和扭转)的接头70、71、72、73、74、75、76和77连接的直线刚性区段61、62、63、64、65、66、67、68和69。
32.区段61的位置由位置矢量x0描述,并且区段61的取向由矩阵o0给出。取向矩阵o0是区段61的局部参照系,其{在(x)上旋绕}和轴垂直于区段61,并且{在(z)上旋绕}轴沿着区段61指向。区段62在区段61的端部开始(即,经由连接接头70),并且其取向由矩阵o1给出。区段63在区段62的端部开始(即,经由连接接头71),并且其取向由矩阵o2给出。这一布置继续,直到区段61至69中的每者在相应的前一区段的端部开始并且具有相应的连接接头70
‑
78。矩阵o0至o8描述探头的实际状态(即,形状),使得外力导致探头偏离其自由状态,在自由状态下没有外力施加到探头。尽管模型几何形状60包括三个区段,但替代的模型几何形状可包括少于八个或多于八个区段。
33.根据所公开的主题的具体实施,在探头模型的约束内确定点e
j
和测量值m
j
之间的最佳匹配。需注意,点e0至e8的计算位置被模型约束在区段61至69上,但实际位置转换器(即,电极50至58)可能不是精确地处在这些点处。探头12在其自由状态下的物理特性由参数{n,l
k
,g
k
(d),p
k
}限定,其中:
34.n—区段数量。
35.l
k
—区段长度(不需要相等),0≦k<n。
36.g
k
(d)—作为可偏转探头的偏转参数d的函数的旋转矩阵(或预成形的探头的常数矩阵),1≦k<n。这一矩阵表示当不施加外力(即,探头的自由形状)时区段k与区段(k
‑
1)之间的相对旋转。
37.p
k
—区段k上的位置转换器的列表,其中0≦k<n。每个位置转换器由其距区段起点的距离、其类型(例如,fls或tas磁性传感器)以及其相对重要性(其在计算成本函数中的权重,由w
j模型
表示,如本文所讨论)来表示。每个区段的列表可包含任何数量的位置转换器,包括零个位置转换器。
38.探头12的物理特性由参数{a
k
,b
k
}来描述,这些参数分别表示区段k和区段(k
‑
1)之间的接头对弯曲和扭转的抵抗力。
39.通常如图2b所示,探头12的实际位置(由电极50至58的位置限定)不同于点m0至m8。根据所公开的主题的具体实施,定义了描述探头12的物理特性的探头模型,并且cpu 20应用探头力学算法以实现探头模型和测量值之间的最佳匹配。结果是探头12的最低成本状态,其描述了探头12的位置和形状(即,不同于自由形状的实际形状)及其偏转值(对于可偏转探头)。偏转值是描述可偏转探头的探头自由形状系列的模型参数。通常,单个偏转参数影响若干接头。不同于由偏转参数限定的旋转的任何接头旋转增加了成本函数。
40.探头力学算法使用成本函数,该成本函数为内能、位置误差和取向误差的加权组合。内能表示探头12与其自由形状的偏差。位置误差表示位置转换器位置(由探头模型和状态给出)与实际位置测量值之间的位置坐标误差。最后,取向误差表示位置转换器取向(由探头模型和状态给出)与实际取向测量值之间的角取向坐标的误差。
41.图2c示出了包括具有多个fls环路222、224、226的探头220的所公开主题的具体实施。fls环路中的每个fls环路可基于相应fls环路的位置处的磁场来生成电压量。fls环路222、224和226中的每个fls环路的电压读数可分别在连接点223、225和227处提供。如本文进一步公开的,预期电压可以与每个fls环路的测量电压进行比较,并且可以是成本函数的因子。
42.图3是示意性地示出根据所公开的主题的具体实施的用于对在探头的位置感测期间所经历的伪影的检测和补偿的系统10的功能部件的框图80。具体地,这一图示出在cpu 20或具有处理器的不同部件上运行的软件和/或固件的功能元件,以基于测量值与预期值以及成本函数来确定探头12的位置。参考下图更详细地描述这些功能元件。
43.图4是示意性地示出了根据所公开的主题的具体实施的用于可视化放置在受检者16内的探头12的方法的流程图。首先,在步骤100处,将探头模型预加载到探头定义模块84中。如本文所讨论,探头模型描述了探头12的结构和物理特性,并且通常针对待使用的导管或另一个探头的类型进行具体限定。探头模型可以包括多个fls环路探头的结构和物理特性。根据具体实施,医疗专业人员28可例如从预定义的选项列表中选择模型。
44.当探头12在受检者16体内移动时,在步骤102处,数据输入模块82以规则的间隔从电极50
‑
58收集输出位置信号。对于探头模型中限定的每个位置转换器50
‑
58,数据输入模块82接收对应的位置测量值。测量值可包括位置矢量(所有类型的转换器)、方向(fls)和/或全取向(tas)。此外,取决于测量值的置信水平,测量权重与每个测量值相关联。对于精确
测量值,权重具有高值,对于具有大预期误差的测量值,权重具有低值。缺失的测量值将具有零权重。测量值参数包括:
45.m
j
—位置测量值
46.m
jor
—取向测量值(可包括全取向或仅包括方向)
47.w
jmsr
—测量值的权重
48.在数据输入模块82接收输入之后,在步骤104处,成本函数计算模块86通过应用成本函数以计算探头定义模块84中定义的探头模型与从数据输入模块82接收的位置数据之间的匹配的质量来定义探头状态成本。这一匹配定义了根据模型具有最低成本的探头形状,这继而给出了沿探头长度/边界的对应于位置转换器的位置的点的校正坐标。探头状态描述了探头12的位置和形状及其偏转值(对于可偏转探头)。cpu 20或包括处理器的其他适用部件在步骤104处确定探头状态。该状态由变量{x0,r
k
,d}给出:
49.x0—第一区段起始点的位置(例如,在图2b中)。
50.r
k
—对于0<k<n,区段k相对于区段k
‑
1的取向,以及对于k=0,第一区段的全局取向:
[0051][0052]
d—偏转参数的值(对于可偏转探头)。这些值不影响探头12的位置和形状,但它们确实影响成本函数的计算并因此影响探头力学算法的结果。作为步骤104的一部分,成本函数计算模块86将探头状态成本馈送到成本最小化模块94,该成本最小化模块将最小化算法应用于成本函数,以找到实现成本函数的最小值(即最佳匹配)的最小成本探头状态。最后,在步骤106处,在确定最低成本探头状态之后,显示器38呈现标测图40,示出探头12在受检者16中的位置。例如,探头位置可以在显示器上以图标的形式示出,该图标具有对应于模型60的位置、取向和形状。
[0053]
图5是示意性地示出根据本发明的实施方案的方法的流程图,通过该方法,成本函数计算模块86将成本函数应用于由数据输入模块82接收的探头测量值。成本函数取决于探头模型、位置测量值、探头状态和从探头输出的电压。使关于探头状态{x0,r
k
,d}和电压输出的成本函数最小化实现了探头模型和测量值之间的最佳匹配。成本函数的计算还取决于分配给测量值的一组自适应权重。自适应权重可在成本函数最小化的过程中动态地改变,并且允许算法忽略与探头模型完全不一致的测量值(下文所述)。自适应权重由w
j自适应
来表示。
[0054]
成本函数具有四个部分:内能、位置误差、取向误差、电压测量值误差。首先,内能计算模块88在步骤110处计算内能得分,该内能得分表示探头12与其自由形状(或由偏转变量进行参数化的一系列自由形状
‑
对于可偏转探头而言)的偏差。对于接头70至77,实际相对取向与当前偏转之间的取向差计算如下:
[0055][0056]
内能计算模块88将这一取向差转换为弯曲角和扭转角:
[0057]
{α
k
,β
k
}=angles(dr
k
)
ꢀꢀꢀ
(2)
[0058]
以下是函数angeles(r)的定义,其中r是表示旋转的单一3
×
3矩阵:
[0059][0060]
α=arcos(r
33
)
ꢀꢀꢀ
(4)
[0061]
β=arctan(r
11
(1 r
33
)
‑
r
31
r
13
,r
12
(1 r
33
)
‑
r
32
r
13
)
ꢀꢀꢀ
(5)
[0062]
其中:
[0063]
arctan(x,y)是矢量(x,y)和x轴之间的角度
ꢀꢀꢀ
(6)
[0064]
返回到成本函数,内能计算模块88使用探头模型参数{a
k
,b
k
}计算内能得分:
[0065][0066]
然后,位置误差计算模块90在步骤112计算位置误差得分,该位置误差得分表示由探头模型和状态给出的位置转换器的位置与实际测量值之间的位置误差。位置误差计算模块90将根据探头模型和状态的电极50至58的位置表示为e
j
并且将对应的测量值表示为m
j
。位置误差计算模块90如下计算加权位置误差:
[0067][0068]
其中m为位置转换器的数量。
[0069]
然后在步骤114处,取向误差计算模块92计算取向误差得分,该取向误差得分表示由探头模型和状态给出的电极50
‑
58的位置与由数据输入模块82接收的实际测量值m之间的取向误差。由探头模型表示的沿着探头12的各个点的取向是不连续函数,该不连续函数在模型接头处具有突变(与位置不同)。在根据模型计算所有相关位置转换器的取向e
jor
之后,取向误差计算模块92计算与测量的取向m
jor
相关的的角度差:
[0070][0071]
以及总取向误差:
[0072][0073]
然后,在步骤115处,电压测量值误差计算模块93计算电压测量值误差得分,该电压测量值误差得分表示基于探头12的位置处的已知磁场的来自探头12的预期的预期电压测量值与数据输入模块82所接收的实际电压测量值之间的电压测量值误差。在给定位置处生成的磁场可基于任何适用的技术诸如经由位于受检者身体下方或附近的定位垫、由身体贴片、校准数据等或它们的组合而为已知的。因此,在探头12处接收的预期磁场可以是已知的。为了清楚起见,可将在导管的位置处生成的已知磁场(例如,由定位垫校准数据确定)施加到探头12的测量形状,以确定来自导管的fls环路的预期电压。此外,可基于fls环路的一部分(例如,基部)处的电压读数来接收导管的fls环路处的测量电压。
[0074]
如探头定义模块84所提供的,步骤115处的电压测量值误差得分可以是给定环路偏离其当前估计形状的量的因子。例如,如果探头12在受检者16体内时不偏离其当前估计形状,则电压测量值误差得分可为零或近似为零,因为预期电压和测量电压之间的差值可为零。然而,与当前估计形状的任何偏差将导致由探头12生成的测量电压的变化。因此,当探头12偏离当前估计形状时,可通过成本函数对测量电压与来自当前环路形状的预期电压
之间的差值进行应用和最小化,以便估计新的环路形状。
[0075]
感应电压计算可基于由磁矢量电势表示的所生成的磁场,其中是空间坐标。例如,这一表示可采用关于矢量球谐函数的多极扩展的形式:
[0076][0077]
其中μ0和π是已知的常数,φ
l,m
是矢量球谐函数(从标量球谐函数导出),是扩展中心,并且c
l,m
是扩展系数。
[0078]
因此,为了计算生成元件在任何点处的磁矢量电势和磁场,场发生器的扩展中心和扩展系数c
l,m
可例如从文件或在持久性存储器中提供。根据本文所公开的示例,可提供9个场生成元件,并且磁场可完全由扩展中心和扩展系数描述,其中k是磁场生成元件的指数。场发生器的矢量电势计算为:
[0079][0080]
由于磁场而在导线环路中感应的电压可通过磁矢量电势对环路的线积分来计算:其中环路几何形状由导管力学算法的当前状态给出。线积分可通过任何已知的数值方法来评估,例如,其可近似为总和其中为沿着环路的当前估计形状的点。
[0081]
成本函数的电压误差部分计算为预期电压与测量电压之间的平方差之和:
[0082]
e
vm
=∑
k
(v
k
‑
m
k
)2ꢀꢀꢀ
(13)
[0083]
其中v
k
为fls上的预期电压(如上所述计算),并且m
k
为测量电压,并且k为场发生器的指数。
[0084]
然后,成本函数计算模块86将成本函数计算为四个部分(即内能、位置误差、取向误差、电压测量值)的加权组合(即步骤116):
[0085]
成本(x0,r
k
,d)=λ
int
e
int
λ
pos
e
pos
λ
or
e
or
λ
vm
e
vm
ꢀꢀꢀ
(14)
[0086]
值{λ
int
,λ
pos
,λ
or
,λ
vm
}描述探头12偏离其自由形状与位置和取向误差的相对重要性。
[0087]
如本文所讨论,在步骤118,成本函数计算模块86将计算的成本函数(即,探头状态成本)馈送到最小化模块94,该最小化模块使与探头状态变量相关的函数成本(x0,r
k
,d)最小化,以便实现探头模型和由数据输入模块82接收的实际测量值之间的最佳匹配。最小化可通过任何合适的数值方法来完成。根据具体实施,例如,成本函数计算模块86使用broyden—fletcher—goldfarb—shanno(bfgs)最小化算法。
[0088]
由于在步骤118中使成本函数最小化采用迭代算法(即,算法的每次迭代改善了解的估计),并且探头12的位置和形状在测量值之间缓慢变化,因此对于每次连续测量仅应用成本函数最小化算法的一次迭代可能是足够的。在每次最小化迭代之后,成本最小化模块94将探头状态馈送到成本函数计算模块86,该成本函数计算模块可以根据各个转换器位置误差改变测量值的自适应权重。通常,对应于阻抗感测电极的权重进行自适应,而更准确的
传感器(诸如磁位置传感器)保持权重1。
[0089]
成本函数计算模块86如下执行权重自适应程序:
[0090]
1.计算初始新权重
[0091][0092]
其中对于具有较大预期误差的传感器而言,值σ较大,从而允许在对应的自适应权重减小之前具有较大误差。
[0093]
2.归一化初始权重
[0094][0095]
3.将来自上面的每个权重限制为1
[0096][0097]
4.更新自适应权重
[0098][0099]
这一自适应程序允许最小化过程忽略位置转换器,该位置转换器一致地产生较大误差但不允许最小化过程忽略过多的位置转换器。
[0100]
根据实施方案,成本函数可基于内能和电压测量值来计算,使得不需要位置误差和取向误差来获得最佳成本函数。可根据本文所公开的技术来计算内能和电压测量值。
[0101]
根据这一实施方案,可以如本文所公开的那样计算探头与探头自由形状的偏差的内能表示。另外,可以如本文所公开的那样计算基于探头位置处的已知磁场的预期电压值与测量电压之间的电压测量值误差。因此,可将成本函数计算为内能和电压测量值误差的加权和。这一实施方案的公式可由下式表示:
[0102]
成本(x0,r
k
,d)=λ
int
e
int
λ
vm
e
vm
ꢀꢀꢀ
(19)
[0103]
本文所述的任何功能和方法都可以在通用计算机、处理器或处理器核中实现。以举例的方式,合适的处理器包括通用处理器、专用处理器、常规处理器、数字信号处理器(dsp)、多个微处理器、与dsp核相关联的一个或多个微处理器、控制器、微控制器、专用集成电路(asic)、现场可编程门阵列(fpga)电路、任何其它类型的集成电路(ic)和/或状态机。可以通过使用处理的硬件描述语言(hdl)指令和包括网络表的其他中间数据(此类指令能够被存储在计算机可读介质上)的结果来配置制造过程,从而制造此类处理器。这种处理的结果可以是掩码作品(maskwork),其随后在半导体制造过程中用于制造实现本公开的特征的处理器。
[0104]
本文所述的任何功能和方法可在计算机程序、软件或固件中实现,这些计算机程序、软件或固件被并入非暂时性计算机可读存储介质中以便由通用计算机或处理器执行。非暂态计算机可读存储介质的示例包括只读存储器(rom)、随机存取存储器(ram)、寄存器、高速缓冲存储器、半导体存储器装置、磁性介质(例如内部硬盘和可移动盘)、磁光介质以及光学介质(例如cd
‑
rom盘和数字多功能盘(dvd))。
[0105]
应当理解,基于本文的公开内容,许多变型都是可能的。虽然在上文以特定组合描述了特征和元件,但是每个特征或元件可独自使用而无需其他特征和元件,或者在具有或不具有其他特征和元件的情况下以各种组合使用每个特征或元件。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。