提供机具命令引导的作业车辆磁流变流体操纵杆系统
1.相关申请的交叉引用
2.本技术要求2020年5月1日向美国专利商标局提交的美国临时申请no.63/019,083的优先权。
技术领域
3.本公开涉及作业车辆(work vehicle)磁流变流体(mrf:magnetorheological fluid)操纵杆(joystick)系统,该mrf操纵杆系统通过抵抗(resisting)操纵杆运动的经mrf施加的力的变化,来引导作业车辆机具(implement)的经操纵杆控制的定位。
背景技术:
4.操纵杆装置通常用于控制在建筑、农业、林业以及采矿业内采用的作业车辆的各个操作方面。例如,对于配备有动臂(boom)组件的作业车辆的情况来说,操作员可以利用一个或更多个操纵杆装置来控制动臂组件移动,并因此控制被安装至动臂组件的外部终端的工具或机具的移动。具有这种经操纵杆控制的动臂组件的作业车辆的常见示例包括:挖掘机(excavator)、伐木归堆机(feller buncher)、集材机(skidder)、拖拉机(tractor)(可以在该拖拉机上安装模块化前端装载机(loader)和反铲(backhoe)附件)、拖拉机装载机、轮式装载机以及各种紧凑型装载机。类似地,对于推土机(dozer)、机动平地机(motor grader)以及配备有运土铲(earth
‑
moving blade)的其它作业车辆的情况来说,操作员可以与一个或更多个操纵杆通过界面连接来控制铲的移动和定位。如同在机动平地机、推土机以及诸如滑移装载机(skid steer loader)这样的某些装载机的情况中一样,操纵杆装置通常也用于操纵或以其它方式控制作业车辆底盘本身的定向移动。鉴于作业车辆内的操纵杆装置的普及,再结合作业车辆经常工作于的相对具有挑战性的动态环境,不断需要改进作业车辆操纵杆系统的设计和功能,特别是达到这种进步可以提高作业车辆操作的安全性和效率的程度。
技术实现要素:
5.公开了一种供在作业车辆上使用的作业车辆磁流变流体(mrf)操纵杆系统。在实施方式中,该作业车辆mrf操纵杆系统包括:操纵杆装置、机具跟踪数据源、mrf操纵杆阻力机构以及控制器架构。该操纵杆装置又包括:基壳;操纵杆,该操纵杆被安装至基壳并且可相对于基壳移动;以及操纵杆位置传感器,该操纵杆位置传感器被配置成,对相对于基壳的操纵杆移动进行监测。该机具跟踪数据源被配置成,在作业车辆的操作期间跟踪机具的移动,同时该mrf操纵杆阻力机构能够被控制以改变阻碍(impeding)相对于基壳的操纵杆移动的mrf阻力。该控制器架构联接至mrf操纵杆阻力机构、操纵杆位置传感器以及机具跟踪数据源。该控制器架构被配置成:(i)利用由机具跟踪数据源提供的数据来跟踪机具相对于虚拟边界的移动;以及(ii)至少部分地基于相对于虚拟边界的机具移动,命令mrf操纵杆阻力机构改变mrf阻力。
6.在另一些实施方式中,该作业车辆mrf操纵杆系统包括:操纵杆装置、mrf操纵杆阻力机构以及控制器架构。该操纵杆装置具有:基壳;操纵杆,该操纵杆被安装至基壳并且可相对于基壳移动;以及操纵杆位置传感器,该操纵杆位置传感器被配置成,对相对于基壳的操纵杆移动进行监测。该mrf操纵杆阻力机构被至少部分地集成到基壳中,并且能够被控制以选择性地抵抗操纵杆相对于基壳的移动。联接至mrf操纵杆阻力机构以及操纵杆位置传感器的控制器架构被配置成:(i)当检测到在操作员输入方向上的操纵杆的操作员移动时,确定沿操作员输入方向的持续操纵杆移动是否会导致机具濒临违反第一虚拟边界;并且(ii)在确定沿操作员输入方向的持续操纵杆移动会导致机具濒临违反第一虚拟边界时,向mrf操纵杆阻力机构发出命令,以生成阻碍沿操作员输入方向的持续操纵杆移动的第一mrf阻力。
7.还在进一步的实现中,该mrf操纵杆系统包含操纵杆装置,该操纵杆装置包括:可相对于基壳转动的操纵杆;mrf操纵杆阻力机构,该mrf操纵杆阻力机构能够被控制以选择性地抵抗操纵杆绕至少一个轴线相对于基壳的转动;以及机具跟踪数据源,该机具跟踪数据源被配置成在作业车辆的操作期间跟踪机具的移动。将控制器架构联接至操纵杆装置、mrf操纵杆阻力机构以及机具跟踪数据源。该控制器架构被配置成:(i)当操作员利用操纵杆装置命令机具移动时,跟踪机具相对于至少第一虚拟边界的移动;以及(ii)向mrf操纵杆阻力机构发出命令,以改变阻碍沿至少一个自由度的操纵杆移动的mrf阻力,以向操作员提供触觉反馈,该触觉反馈指示机具到与第一虚拟边界的接近度。
8.在附图和下面的描述中对一个或更多个实施方式的细节进行阐述。其它特征和优点根据该描述、附图以及权利要求将变得显而易见。
附图说明
9.在下文中将结合以下附图描述本公开的至少一个示例:
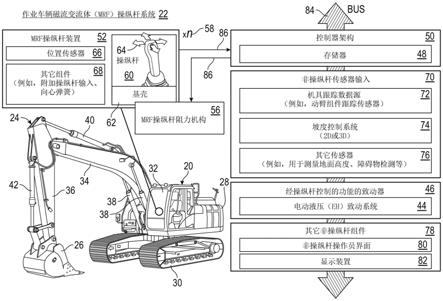
10.图1是如根据本公开的示例实施方式所例示的作业车辆(在这里,挖掘机)上的示例磁流变流体(mrf)操纵杆系统的示意图;
11.图2是从图1所示的挖掘机驾驶室内看的立体图,例示了可以被包括在示例mrf操纵杆系统中并且由操作员用来控制挖掘机动臂组件的移动的两个操纵杆装置;
12.图3和图4是示例mrf操纵杆系统的如部分地示出并且沿贯穿操纵杆的垂直剖面截取的截面示意图,该截面示意图例示了mrf操纵杆系统的一种可能的构造;
13.图5是由mrf操纵杆系统的控制器架构适当地执行的示例处理的流程图,该示例处理根据相对于一个或更多个虚拟边界的机具移动来改变选择性地抑制操纵杆移动的mrf阻力;
14.图6是其中可以将图1所示的挖掘机用于采挖挖掘特征的一种方式的示意图,同时mrf操纵杆系统的控制器架构在示例用例中执行在图5中阐述的处理;以及
15.图7是以非穷举的方式例示其中可以有利地集成mrf操纵杆系统的实施方式的附加示例作业车辆的图形。
16.各个图中的相同标号指示相同要素。为简单和清楚例示起见,可以省略公知特征和技术的描述和细节,以避免不必要地混淆在随后的详细描述中描述的本发明的示例和非限制性实施方式。还应理解,除非另外声明,否则附图中出现的特征或要素不必按比例绘
制。
具体实施方式
17.在上面简要描述的附图中示出了本公开的实施方式。在不脱离如所附权利要求阐述的本发明的范围的情况下,本领域的技术人员可以设想到对示例实施方式的各种修改。如本文中出现的,术语“作业车辆”包括作业车辆的所有部分。因此,在在机具中端接的动臂组件附接至作业车辆的底盘的实现中,术语“作业车辆”既涵盖了底盘又涵盖了动臂组件,以及被安装至动臂组件的终端的机具。
18.概述
19.下面公开了通过经mrf施加的阻力的受控变化来提供机具命令引导(implement command guidance)的作业车辆磁流变流体(mrf:magnetorheological fluid)操纵杆系统,该阻力阻碍沿一个或更多个自由度(dof:degrees of freedom)的操纵杆运动。mrf操纵杆系统的实施方式包括处理子系统或“控制器架构”,该处理子系统或控制器架构在工作上联接至mrf操纵杆阻力机构;即,如下机构、装置或阻尼器,其包含磁流变流体并且能够通过电磁(em:electromagnetic)场强度的变化来修改流体的流变性(粘度),以对阻碍沿至少一个dof的操纵杆运动的阻力提供受控调节。该阻力在下文中被称为“mrf阻力”,而mrf阻力阻碍沿特定方向或方向的组合的操纵杆运动的程度被称为沿相关方向的“操纵杆刚度(joystick stiffness)”。
20.在mrf操纵杆系统的操作期间,控制器架构通过抑制操纵杆移动的mrf阻力的变化,来提供希望的机具命令引导。具体地,在mrf操纵杆系统的实施方式中,控制器架构可以根据相对于一个或更多个虚拟边界的经操纵杆控制的机具移动,来命令mrf操纵杆阻力机构改变mrf阻力。当在特定的方向(本文中称为“操作员输入方向”)上发生操纵杆移动时,控制器架构确定沿操作员输入方向的持续操纵杆移动是否会使机具达到与一个或更多个虚拟边界的预定接近度(proximity),这些虚拟边界是通过控制器在三维(3d)空间容积中建立的。如果确定沿操作员输入方向的持续操纵杆移动会使机具达到与虚拟边界的预定接近度,则控制器架构向mrf操纵杆阻力机构发出命令,以生成制止(deterring)沿操作员输入方向的持续操纵杆移动的mrf阻力。这样做时,mrf操纵杆系统通过相关操纵杆并且向操作员提供触觉提示,以减慢(若未停止(halt)的话)操纵杆沿操作员输入方向的移动。
21.如果操作员沿操作员输入方向继续转动(或者以其它方式移动)操纵杆,控制器架构就可以重复上述处理以渐进地增加操纵杆阻力。例如,在一种方法中,控制器架构向mrf操纵杆阻力机构发出命令,以随着经操纵杆控制的机具逼近邻近虚拟边界,增加抵抗沿操作员输入方向的操纵杆运动的mrf阻力,其中mrf阻力与机具和虚拟边界之间的距离或间隔减小大致成比例地增加。另外或者另选地,控制器架构可以确定经操纵杆控制的机具何时濒临违反虚拟边界;例如,预测发生在相对较短的时间帧内(例如,约一秒钟或更短)。当确定机具濒临违反虚拟边界时,控制器架构可以向mrf操纵杆阻力机构发出命令,以生成阻碍沿操作员输入方向的进一步操纵杆运动的最大mrf阻力。在实施方式中,最大mrf阻力能足以完全阻止(arrest)沿操作员输入方向的操纵杆运动,或者至少使这种操纵杆的运动变得相对困难,以进一步阻拦(discourage)(若未防止的话)机具违反虚拟边界。仍在其它情况下,当机具违反这种虚拟边界时,控制器架构可以生成触觉提示,诸如短暂的阻力脉冲或者
有感觉的止动(detent)。
22.在各种操作场景中,有用地建立了上述基于mrf的操纵杆引导方案以及对应虚拟边界。例如,可以结合推土机、机动平地机、挖掘机、反铲或者配备有(例如集成的)坡度控制系统的类似作业车辆的操作来有利地利用这种虚拟边界,其中mrf操纵杆系统提供经mrf生成的触觉反馈(mrf
‑
generated tactile feedback),以帮助操作员以向地表赋予希望坡度或拓扑(topology)的方式来定位机具。具体地,在这种实施方式中,由被加载到作业车辆的车载计算机中的设计数据所定义的海拔坐标可以用于建立这种虚拟边界,并且基于机具(例如,机具的刃口(cutting edge))相对于该虚拟边界的接近度来生成变化的mrf阻力效果。类似地,在其它挖掘操作中,可以对应于如所希望地利用作业车辆的采挖工具或挖掘机具创建的沟渠或其它挖掘特征的表面来建立虚拟边界。例如,在至少一些实施方式中,可以以二维(2d)或3d挖掘基底(excavation floor)的形式建立虚拟边界,该挖掘基底可以表示下阈值,如所希望地避免在该挖掘基底下方进一步挖掘。仍在其它情况下,mrf操纵杆系统的控制器可以建立围绕或相邻障碍物(例如,埋入的导管或电气管道)的虚拟边界,以防止或至少制止操作员操纵杆命令,不然的话,在执行挖掘任务期间,该操作员操纵杆命令可能会使机具不合需要地靠近或接触此类障碍物。同样地,也可以将下述虚拟边界用于在非挖掘作业任务期间帮助引导经操纵杆控制的机具移动。例如,在该后一点上,可以建立采用虚拟天花板形式的虚拟边界,以限制可以将铲斗或其它机具升起至的地面上高度;举例来说,如当作业车辆(诸如配备有前端装载机(fel:)附件的拖拉机)在封闭的结构(例如,谷仓)、矿井或者存在高架障碍物的作业区中进行操作时可能是有用的。
23.按上面描述的方式,在机具的经操纵杆控制的移动期间,mrf操纵杆系统的实施方式提供直观的触觉引导,以增强操作员意识到相对于一个或更多个虚拟边界的机具移动。这又可以以更高程度的精度,提高的效率并且以减少的意外或有问题的机具移动的可能性,来协助或引导操作员来命令机具移动。此外,与潜在地能够选择性地限制操纵杆运动的其它机构(例如,闸(brake)机构和人工力反馈(aff:artificial force feedback)电动机)的使用相比,引导操纵杆输入运动的mrf技术的使用提供了多个好处。作为一个这种好处,给定磁流变流体的流变特性(例如,粘度)通常可以通过浸入了磁流变流体的em场的强度变化,来以相对精确、明显且快速的方式进行调节。由于em场的强度同样可以以受控和响应的方式进行改变,因此,mrf操纵杆阻力机构可以提供高度简化、低滞后的响应时间,例如,约几毫秒(ms)或更短。此外,mrf操纵杆阻力机构能够在基本连续的范围内精确地改变mrf阻力的强度。这些特性可使mrf操纵杆装置能够生成可使作业车辆操作员感觉到的各种不同触觉阻力效果,包括选择性地施加止动,以及抑制沿特定方向的操纵杆运动的mrf阻力的连续变化。作为更进一步的好处,mrf操纵杆系统可以提供可靠的低噪声运行,同时结合使用无毒(例如,含羰基铁的)磁流变流体。
24.现在,将结合图1至图6来描述作业车辆mrf操纵杆系统的示例实施方式。在下面描述的示例中,mrf操纵杆系统主要是在特定类型的作业车辆(即,挖掘机)的背景下进行讨论的。另外,在下面的示例中,mrf操纵杆系统包括两个操纵杆装置,这两个操纵杆装置具有能够绕两个垂直轴线转动的操纵杆,并且用于控制挖掘机动臂组件以及附接至该动臂组件的机具(例如,铲斗)的移动。尽管有以下示例,但是在进一步的实现中,mrf操纵杆系统可以包括更多或更少数量的操纵杆,并且各个操纵杆装置可以任何数量dof并且沿着任何合适运
动模式(motion pattern)进行移动;例如,在另选实施方式中,给定的操纵杆可以绕单个轴线转动,或者还可以可以被限制成沿着预定轨迹(例如,h形轨迹)或运动模式移动。此外,下面描述的mrf操纵杆系统可以被部署在包括经操纵杆控制的功能的宽范围的作业车辆上,下面结合图7讨论了作业车辆的附加示例。
25.提供机具命令引导的示例mrf操纵杆系统
26.初始参照图1,呈现了配备有作业车辆mrf操纵杆系统22的示例作业车辆(在这里为挖掘机20)。除了mrf操纵杆系统22以外,挖掘机20还包括在工具或机具(诸如铲斗26)中端接的动臂组件24。可以将各种其它机具与铲斗26互换并且附接至动臂组件24的终端,例如包括其它铲斗、抓斗以及锤。挖掘机20具有主体或底盘28、支承底盘28的履带式底架30、以及位于底盘28前部并包围操作员台的驾驶室32。挖掘机动臂组件24从底盘28伸出并且包含作为主要结构性组件的内侧或近端动臂34(下文中,被称为“起重臂34”)、外侧或远端动臂36(下文中,被称为“铲斗柄(dipperstick)36”)以及多个液压缸38、40、42。液压缸38、40、42又包括:两个起重缸38、铲斗柄缸40以及铲斗缸42。起重缸38的伸出和缩回使起重臂34绕第一枢轴接头转动,在该第一枢轴接头处,起重臂34接合至挖掘机底盘28(在这里,与驾驶室32(的右侧)相邻的位置)。铲斗柄缸40的伸出和缩回使铲斗柄36绕第二枢轴接头转动,在该第二枢轴接头处,铲斗柄36接合至起重臂34。最后,铲斗缸42的伸出和缩回使挖掘机铲斗26绕第三枢轴接头转动或“卷起(curl)”,在该第三枢轴接头处,铲斗26接合至铲斗柄36。
27.液压缸38、40、42被包括在电动液压(eh:electrohydraulic)致动系统44中,该eh致动系统44在图1中由题为“经操纵杆控制的功能的致动器”的框46包围着。利用位于挖掘机驾驶室32内并且被包括在mrf操纵杆系统22中的至少一个操纵杆来控制挖掘机外部组件24的移动。具体地,操作员可以利用在mrf操纵杆系统22中包括的一个或多个操纵杆来控制液压缸38、40、42的伸出和缩回,并且经由挖掘机底盘28相对于履带式底架30的转动来控制动臂组件24的回转动作。所描绘的eh致动系统44还包含各种其它未例示的液压组件,这些未例示的液压组件可以包括流动管线(flow line)(例如,柔性软管)、止回阀或安全阀、泵、配件、过滤器等。另外,eh致动系统44包含电子阀致动器和流量控制阀(诸如滑阀式多路阀),可以对该流量控制阀进行调制以调整加压液压流体进出液压缸38、40、42的流量。假如下面描述的控制器架构50能够经由发送给致动器46中的选定致动器(该选定致动器实现挖掘机20的经操纵杆控制的功能)的命令来控制动臂组件24的移动,那么在此陈述的eh致动系统44的特定构造或架构在很大程度上对于本公开的实施方式是不重要的。
28.如在图1的左上部中示意性地例示的,作业车辆mrf操纵杆系统22包含一个或更多个mrf操纵杆装置52、54。如本文中出现的,术语“mrf操纵杆装置”是指包括至少一个操纵杆或控制杆的操作员输入装置,可以通过利用本文所描述的类型的mrf操纵杆阻力机构来选择性地阻碍该操纵杆或控制杆的移动。虽然为清楚起见,在图1中示意性地示出了一个这种mrf操纵杆装置52,但是mrf操纵杆系统22可以包括任何实际数量的操纵杆装置,如由符号58所指示的。在示例挖掘机20的情况下,mrf操纵杆系统22通常将包括两个操纵杆装置;例如,下面结合图2描述的操纵杆装置52、54。下面进一步讨论可以将两个这种操纵杆装置52、54用于控制挖掘机动臂组件24的移动的方式。然而,首先提供对如图1中示意性地例示的操纵杆装置52的一般性讨论,以设立可以更好地理解本公开的实施方式的通用框架。
29.如图1中示意性地例示,mrf操纵杆装置52包括被安装至下支承结构或基壳62的操
纵杆60。操纵杆60可沿至少一个dof相对于基壳62移动,并且可绕一个或更多个轴线相对于基壳62转动。在所描绘的实施方式中,并且如箭头64所指示,mrf操纵杆装置52的操纵杆60可绕两个垂直轴线相对于基壳62转动,并且同样将在下面进行描述。mrf操纵杆装置52包括一个或更多个操纵杆位置传感器66,该操纵杆位置传感器66用于监测操纵杆60相对于基壳62的当前位置和移动。mrf操纵杆装置52中也可以包括各种其它组件68,包括:按钮、拨盘、开关或者其它手动输入特征,它们可以位于操纵杆60本身上、位于基壳62上、或者这两者的组合。可以将弹簧部件(气弹簧或机械弹簧)、磁体或流体阻尼器并入操纵杆装置52中,以提供针对操纵杆的原位(home position)的希望返回率,以及微调操作员在与mrf操纵杆装置52交互时所察觉到的有关操纵杆60的希望感受或“刚度”。在更复杂的组件中,也可以将各种其它组件(例如,潜在地包括一个或更多个aff马达)并入mrf操纵杆装置52中。在其它实现中,可以从mrf操纵杆装置52中省略这种组件。
30.mrf操纵杆阻力机构56至少部分地集成到mrf操纵杆装置52的基壳62中。mrf操纵杆阻力机构56(以及本文中提及的其它mrf操纵杆阻力机构)也可以被另选地称为“mrf阻尼器(damper)”、“mrf闸装置(brake device)”或者简称为“mrf装置”。可以对mrf操纵杆阻力机构56进行控制以调节mrf阻力,并因此调节操纵杆刚度,以抵抗操纵杆沿至少一个dof相对于基壳62的运动。在mrf操纵杆系统22的操作期间,控制器架构50可以选择性地向mrf操纵杆阻力机构56发出命令,以增加操纵杆刚度从而阻碍绕特定轴线或轴线的组合的操纵杆转动。如下更全面讨论的,控制器架构50可以向mrf操纵杆阻力机构56发出命令,以通过增加至少部分地浸入了该机构56中所包含的磁流变流体的em场的强度,来施加这种mrf阻力。下面结合图3和图4来描述可以实现mrf操纵杆阻力机构56的一种方式的一般化示例。当确定操纵杆60沿特定方向(本文中被称为“操作员输入方向”)的持续转动会导致机具移动到虚拟边界的所限定的接近度或者虚拟边界违反时,控制器架构50可以向mrf运动阻力机构56发出命令,以生成这种mrf阻力。在挖掘机20的情况下,特别地,控制器架构50确定mrf操纵杆装置52中包括的操纵杆60持续转动(和/或第二个相似的mrf操纵杆装置中包括的另一操纵杆的持续转动)会导致铲斗26(或者动臂组件24的另一部分)移动到虚拟边界的所限定的接近度和/或会导致铲斗26移动通过虚拟边界。
31.在操纵杆60(和/或mrf操纵杆系统22中包括的第二操纵杆)的转动会导致挖掘机动臂组件24相对于所讨论的一个或多个虚拟边界的移动的投射方式方面,控制器架构50考虑来自多个数据源的输入,这些数据源包括挖掘机20上的多个非操纵杆传感器70。这种非操纵杆传感器70可以包括机具跟踪数据源中所包含的传感器,机具跟踪数据源72可以包括提供与挖掘机20的位置、速度、行进方向(heading)或取向的变化有关的信息的任何传感器或数据源。适于对挖掘机底盘28的位置和移动进行监测的传感器系统包括:gps模块;从中可以计算出底架履带的转动速率的传感器;电子罗盘;以及可以被封装为一个或更多个imu的mems装置(诸如加速度计和陀螺仪)。类似地,在实施方式中,可以利用被固定至底盘28的一个或更多个mems装置或倾斜传感器(倾斜仪)来监测挖掘机底盘28相对于重力(或另一参考方向)的取向。
32.机具跟踪数据源72还可以包括任何数量和类型的动臂组件跟踪传感器,这些动臂组件跟踪传感器适于跟踪挖掘机动臂组件24的位置和移动。在实施方式中,这种传感器可以包括:被集成到挖掘机动臂组件24中的旋转或线性可变位移换能器。例如,在一个可能的
实现中,可以将旋转位置传感器集成到动臂组件24的枢轴接头中;并且可以将由旋转位置传感器捕获的角位移读数结合动臂组件24的已知尺寸(如从存储器48再调用的)用于在三维空间中跟踪动臂组件24(包括铲斗26)的姿势和位置。在其它情况下,可以对液压缸38、40、42的伸出和缩回进行测量(例如,利用线性可变位移传感器),并且用于计算挖掘机动臂组件24的当前姿势和定位。除了或代替前述传感器读数,控制器架构50还可以考虑其它传感器输入,诸如基于惯性的传感器读数(如通过并入动臂组件24中的imu所捕获的传感器读数)和/或挖掘机具的视觉系统跟踪,仅列出几个例子。
33.在实施方式中,挖掘机20还可以配备有坡度控制系统74。可以将这种坡度控制系统74集成到挖掘机中;或代替地经由售后设备修改添加至挖掘机;例如,外部桅杆(external mast)和线缆的翻新。坡度控制系统74可以是二维或三维系统,其利用设计数据,基于机具以及更一般地现实背景下的作业车辆的当前位置,来计算作业车辆机具(例如,铲斗26)的刃口位置。通常,这是通过以下方式来实现的:将包含所希望的地形布局的数据文件加载到作业车辆计算机系统上;并且使所希望的地形布局与例如利用作业车辆上的gps模块监测到的机器位置关联。然后,可以生成视觉引导(例如,在下面描述的显示装置82上),当控制作业车辆以适于实现希望的坡度的方式来定位机具的刃口时,操作员可以依靠该视觉引导。现在,将这种系统部署在挖掘机、推土机、机动平地机以及通常用于挖掘目的的类似作业车辆上。
34.非操纵杆传感器输入70还可以包括一个或更多个传感器,所述一个或更多个传感器提供对局部地平面或高度进行指示的数据。例如,在实施方式中,挖掘机20可以配备有相对全面(例如,360度)的障碍物检测系统,这种障碍物检测系统例如使用激光雷达(lidar)、雷达(radar)或超声传感器阵列来提供对作业车辆附近的障碍物的高度准确的大范围检测。当存在时,控制器架构50可以利用这种障碍物检测系统来估计到挖掘机20的底盘28的挖掘地面高度。在其它情况下,控制器架构50可以以不同方式估计地面;例如,通过利用校准处理来估计挖掘地面高度,在该校准处理中,操作员将铲斗26放置在地面上,然后估计铲斗26的位置。这种数据例如可以有用于:允许操作员通过输入指示可操作包络(operational envelope)的上边界或下边界的地上高度或地下高度的数据,来分别指定对这种边界进行限定的虚拟天花板或虚拟基底的希望的竖直位置。
35.在各种实现中,非操纵杆传感器输入70也可以包括与障碍物检测有关的传感器。可以将这种传感器包括在障碍物检测系统中,该障碍物检测系统例如使用激光雷达、雷达或超声传感器阵列来提供对作业车辆附近的障碍物的相对大范围检测(例如,360度检测)。在实施方式中,这种障碍物检测系统也可以通过对由位于挖掘机20周围的一个或更多个摄像机所提供的现场摄像机馈送的视觉分析或图像处理,来检测挖掘机20附近的障碍物。然后,可以将这种障碍物检测数据(如由挖掘机20上的障碍物检测系统收集到的)放置在车辆总线(例如,下面描述的can总线84)上,或者可以以其它方式提供给控制器架构50,以在挖掘机20相对于此类障碍物建立一个或更多个虚拟边界的实施方式中加以考虑,如下进一步讨论的。类似地,在实施方式中,控制器架构50可以从存储器48调用映射挖掘机20附近的障碍物的位置的数据,可以将该数据利用gps或者另一种跟踪方法与挖掘机位置关联。例如,这种障碍物可以包括埋入的导管、电气管道或者其它这种结构,在利用挖掘机20执行的挖掘任务期间希望避开这种障碍物。利用从存储器48调用的这种障碍物映射数据,作为当前
挖掘机位置的地理参考,控制器架构50可以建立虚拟壁,该虚拟壁限定或接界(bordering)可操作包络,例如当在相邻埋入物的位置处采挖沟渠或其它挖掘特征时,希望将铲斗26维持在该可操作包络中。
36.mrf操纵杆系统22的实施方式还可以包括任何数量的附加非操纵杆组件78,诸如操作员界面80、位于挖掘机驾驶室32中的显示装置82、以及通常被包括在作业车辆中的各种其它未例示的组件类型。特别地,操作员界面80可以包括用于接收操作员输入的任何数量和类型的非操纵杆输入装置,诸如按钮、开关、旋钮以及在mrf操纵杆装置52外部的类似手动输入。被包括在操作员界面80中的这种输入装置也可以包括诸如轨迹球或操纵杆这样的光标类型的输入装置,这种光标类型的输入装置用于与在显示装置82上生成的图形用户界面(gui)进行交互。可以将显示装置82置放在驾驶室32内,并且可以采取任何图像生成装置的形式,在该图像生成装置上可以以可视方式呈现可视警报和其它信息。显示装置82也可以生成接收操作员输入的gui,或者可以包括接收操作员输入的其它输入(例如,按钮或开关),在执行下面描述的处理时,该操作员输入可以与控制器架构50有关。在某些情况下,显示装置82也可以具有触摸输入能力。
37.如在图1中进一步示意性地描绘的,将控制器架构50与存储器48关联,并且可以通过任何数量的有线数据连接、无线数据连接或者它们的任何组合来与各种所例示的组件进行通信;举例来说,如概括地例示的,控制器架构50可以通过集中式车辆总线(诸如控制器区域网(can:controller area network)总线84)来从各个组件接收数据。如本文中出现的,术语“控制器架构”是以非限制性意义来加以利用的,以总体上指代诸如示例mrf操纵杆系统22这样的作业车辆mrf操纵杆系统的处理子系统。因此,控制器架构50可以涵盖或者可以关联有任何实际数量的处理器、单独控制器、计算机可读存储器、电源、存储装置、接口卡以及其它标准化组件。在许多情况下,控制器架构50可以包括直接与操纵杆接口关联的本地控制器,以及被置放在由驾驶室32包围的操作员台内的其它控制器,并且本地控制器根据需要与挖掘机20上的其它控制器进行通信。控制器架构50也可以包括被设计成执行各种处理任务、计算以及本文所描述的控制功能的任何数量的固件和软件程序或者计算机可读指令,或者可以与固件和软件程序或者计算机可读指令协作。可以将这种计算机可读指令存储在与控制器架构50关联(该控制器架构可访问)的存储器48的非易失性扇区内。虽然在图1中被概括地例示为单个框,但是存储器48可以涵盖适于存储计算机可读代码或指令以及用于支持mrf操纵杆系统22的操作的其它数据的任何数量和类型的存储介质。在实施方式中,可以将存储器48集成到控制器架构50中,举例来说,如系统级封装、芯片上系统或者另一类型的微电子封装或模块。
38.更详细地讨论挖掘机20的操纵杆配置或布局,在实施方式之间,mrf操纵杆系统22中所包括的操纵杆装置的数量以及这种操纵杆的结构性方面和功能将有所不同。如前所述,尽管在图1中仅示意性地示出了单个操纵杆装置52,但是mrf操纵杆系统22通常会有支持挖掘机动臂组件控制的两个操纵杆装置52、54。进一步例示了这一点,图2提供了从挖掘机驾驶室32内看的立体图,并且描绘了在mrf操纵杆系统22的实施方式中适当包括的两个mrf操纵杆装置52、54。如可以看出,将mrf操纵杆装置52、54置放在操作员座椅86的相反两侧,使得操作员使用双手可以相对容易地同时操纵左mrf操纵杆装置52和右操纵杆装置54两者。延续上面结合图1引入的标号,各个操纵杆装置52、54包括操纵杆60,该操纵杆60被安
装至下支承结构或基壳62,以绕两个垂直轴线相对于基壳62转动。操纵杆装置52、54也各自包括柔性盖或防护罩(boot)88,该柔性盖或防护罩88接合在操纵杆60的下部与它们的相应基壳62之间。附加操纵杆输入也以拇指可触及的按钮的形式设置在各个操纵杆60上,还可以作为其它未例示的手动输入(例如,按钮、拨盘和/或开关)设置在基壳62上的。图2中所示出的挖掘机20的其它显著特征包先前提及的显示装置82和踏板/控制杆机构90、92,该踏板/控制杆机构90、92控制履带式底架30的左右履带的相应移动。
39.可以利用不同的控制方案来将操纵杆装置51、54中所包括的操纵杆60的移动转变为挖掘机动臂组件24的对应移动。在许多情况下,挖掘机20将以“反铲控制”或“sae控制”模式以及“国际标准组织”或“iso”控制模式中的任一模式(并且通常允许在这些模式之间切换)来支持动臂组件控制。对于反铲控制模式的情况来说,左操纵杆60向操作员左侧的移动(箭头94)使挖掘机动臂组件24沿向左方向回转(对应于底盘28相对于履带式底架30的逆时针转动),左操纵杆60向操作员右侧的移动(箭头96)使动臂组件24沿向右方向回转对应于底盘28对于履带式底架30的顺时针转动),左操纵杆60沿向前方向的移动(箭头98)降下起重臂34,以及左操纵杆60沿向后(aft或rearward)方向的移动(箭头100)升起起重臂34。而且,对于反铲控制模式的情况来说,右操纵杆60向左的移动(箭头102)使铲斗26向内卷起,右操纵杆60向右的移动(箭头104)使铲斗26伸开(uncurl)或“打开”,右操纵杆60沿向前方向的移动(箭头106)使铲斗柄36向外转动,以及右操纵杆60沿向后方向的移动(箭头108)使铲斗柄36向内转动。比较地,对于iso控制模式的情况来说,针对回转命令和铲斗卷起命令的操纵杆运动保持不变,而将起重臂和铲斗柄的操纵杆映射进行了对调(reversed)。因此,在iso控制模式下,左操纵杆60的向前和向后移动以前述方式控制铲斗柄转动,而右操纵杆60的向前和向后移动以上述方式控制起重臂34的运动(升起和降下)。
40.现在,参照图3和图4,由两个简化截面示意图来表示mrf操纵杆装置52和mrf操纵杆阻力机构56的示例构造。虽然这些附图例示了单个mrf操纵杆装置(即,mrf操纵杆装置52),但是下面的描述同样适用于示例mrf操纵杆系统22中所包括的另一mrf操纵杆装置54。仅以非限制性示例的方式提供以下描述,注意,并入mrf操纵杆阻力机构或者在功能上与mrf操纵杆阻力机构协作的多个不同操纵杆设计都是可以的。假如磁流变流体的流变特性(粘度)的有意义的变化是和em场强度的受控变化一道发生的(如下所述),那么磁流变流体的特定组成在很大程度上对于本公开的实施方式也不是很重要。然而,为了完整起见,注意到一种完全适合在本公开实施方式中使用的磁流变流体组成包含分散在载流体中的导磁性(例如,羰基铁)颗粒,载流体在重量上主要由油或醇(例如,乙二醇)组成。这种导磁性颗粒可以具有微米范围内的平均直径(或者如果颗粒具有非球形(例如,长方形)形状,则具有其它最大横截面尺寸);例如,在一个实施方式中,使用具有介于1微米至10微米之间的平均直径的球形导磁颗粒。也可以在磁流变流体中包括各种其它添加剂(诸如分散剂或稀释剂),以微调其特性。
41.现在,参照图3和图4中所示的示例操纵杆构造,并且再次视情况延续先前引入的标号,mrf操纵杆装置52包括具有至少两个不同部分或结构性区域的操纵杆60:上手柄110(该附图中仅示出了该上手柄的简化下部),以及大体上为球形的下基部112(在下文中,被称为“大体球形基部112”)。操纵杆60的大体球形基部112被捕获在基壳62的两个壁114、116之间,这两个壁可以彼此大致平行地延伸以形成基壳62的上部。设置了贯穿壳壁114、116的
竖直对准的中心开口,并且该中心开口的相应直径的尺寸被调整为小于大致球形基部112的直径。壁114、116之间的间距或竖直偏移还被选择成,使得大体球形基部112整体被捕获在竖直间隔开的壳壁114、116之间,以形成球窝式接头。这允许操纵杆60绕两个垂直轴线相对于基壳62转动,这两个垂直轴线对应于在图3和图4中出现的坐标图例118的x轴线和y轴线;同时总体上防止操纵杆60沿坐标图例118的x轴线、y轴线以及z轴线的平移移动。在另一些实施方式中,可以采用各种其它机械排布结构来将操纵杆安装至基壳,同时允许操纵杆绕两个垂直轴线转动(诸如万向节排布结构)。在不太复杂的实施方式中,可以设置枢轴(pivot)或销接头(pin joint),以允许操纵杆60绕单个轴线相对于基壳62转动。
42.mrf操纵杆装置52的操纵杆60还包括从大体球形基部112起沿与操纵杆手柄110相反的方向突出的刺状部(stinger)或下操纵杆延伸部120。在所例示的示意图中,将下操纵杆延伸部120通过单个复位弹簧124联接至基壳62的静附接点;在此注意,处于例示的目的,简化了这种排布结构,并且在mrf操纵杆装置52的实际实施方式中通常将采用更复杂的弹簧复位排布结构(或者其它操纵杆偏置机构(若有的话))。当操纵杆60从图3所示的空档位置或原位位移时,如图4所示,复位弹簧124偏斜,以促使操纵杆60向原位(图3)返回。从而,作为示例,在转动到图4所示的位置之后,如果作业车辆操作员随后松开操纵杆手柄110,那就在复位弹簧124的影响下,操纵杆60将向图3所示的空档位置或原位返回。
43.示例mrf操纵杆阻力机构56包括分别如图3和图4中所示的第一mrf缸126和第二mrf缸128。第一mrf缸126(图3)被机械地接合在下操纵杆延伸部120与基壳62的部分地示出的静附接点或基础结构特征130之间。类似地,第二mrf缸128(图4)被机械地接合在下操纵杆延伸部120与基壳62的静附接点132之间,并且mrf缸体128绕坐标图例118的z轴线对于mrf缸126转动了大约90度。由于这种结构性配置,因此,mrf缸126(图3)可被控制,以选择性地抵抗操纵杆60绕坐标图例118的x轴线的转动,而mrf缸128(图4)可被控制,以选择性地抵抗操纵杆60绕坐标图例118的y轴线的转动。另外,两个mrf缸126、128均可以被共同地控制以选择性地抵抗操纵杆60绕落在x轴线与y轴线之间并且在x
‑
y平面内延伸的任何轴线的转动。在其它实施方式中,可以利用不同的mrf缸配置,并且包括更多或更少数量的mrf缸;例如,在希望选择性地抵抗操纵杆60仅绕x轴线或者仅y轴线的转动的实现中,或者在操纵杆60仅能绕单个轴线转动的实现中,可以采用单个mrf缸或一对对抗(antagonistic)的缸。最后,尽管在简化示意图未示出,但是在进一步的实现中,mrf缸126、128中可以包括任何数量的附加组或者可以与任何数量的附加组件关联。这种附加组件可以包括对缸126、128的行程(若希望获知的话)进行监测以例如跟踪操纵杆位置的传感器,来代替下述操纵杆传感器182、184。
44.mrf缸126、128皆包括缸体134,活塞138、140可滑动地安装至该缸体134。各个缸体134含筒形腔或孔136,该腔或孔中安装有活塞138、140中的一个活塞的端头138,以沿着缸体134的纵向轴线或中心线平移移动。绕该腔或孔的外周,各个活塞端头138皆装配有一个或更多个动态密封件(例如,o形圈)以密封地接合缸体134的内表面,从而将孔136分隔成两个对抗的可变容积液压室。活塞138、140还各自包括细长活塞杆140,该活塞杆140从活塞端头138起朝着操纵杆60的下操纵杆延伸部120突出。活塞杆140延伸穿过固定在缸体134的开口端上方的端盖142(再次,接合任何数量的密封件)以在操纵杆附接点144处附接至下操纵杆延伸部120。在例示示例中,操纵杆附接点144采取销或枢轴接头的形式;然而,在其它实
施方式中,可以采用更复杂的接头(例如,球形接头)来形成这种机械联接。在操纵杆附接点144的对面,将mrf缸126、128的相反端经由球形接头145安装至相应静附接点130、132。最后,在各个mrf缸体126、128的相反两端中还设置有液压端口146、148,以允许磁流变流体的流入和流出与活塞138、140沿着mrf缸126、128的相应纵向轴线的平移移动或行程变化相结合。
45.mrf缸126、128分别经由流动管线连接部178、180与对应mrf阀(valve)150、152经流体互连。正如与mrf缸126、128的情况一样,在所示示例中,mrf阀150、152被呈现为相同的,但在进一步的实现中可以加以改变。尽管按通用术语称为“阀”(特别地,考虑到mrf阀150、152的功能是控制磁流变流体的流动),但是将观察到,在目前的示例中,mrf阀150、152缺少阀部件和其它移动的机械零件。作为有益的推论,mrf阀150、152提供了故障安全操作,因为在不太可能的mrf阀失效的情况下,仍然允许磁流变流体以相对较小的阻力通过mrf阀150、152。因而,如果mrf阀150、152中的任一个或两个因任何原因而失效,mrf操纵杆阻力机构56用于施加对操纵杆运动进行限制或抑制的阻力的能力就可能受到损害;然而,操纵杆60将能以类似于传统的非mrf操纵杆系统的方式绕x轴线和y轴线自由转动,并且mrf操纵杆装置52通常仍然能够控制挖掘机动臂组件24。
46.在所描绘的实施方式中,mrf阀150、152皆包括阀壳154,该阀壳154包含被固定在细长缸芯158的相反两端上的端盖156。大体环形或管状流道160绕缸芯158并且在两个流体端口162、164之间延伸,这两个流体端口162、164是通过相反的端盖156设置的。环形流道160被多个em感应线圈166包围(贯穿这些em感应线圈延伸)(下文中,被称为“em线圈166”),这些感应线圈绕顺磁性支持器(holder)168缠绕,并且散置有多个轴向或纵向间隔开的铁氧体环170。管状罩172包围该组件,同时贯穿该管状罩172设置有许多引线,以便于与所容纳的em线圈166进行电互连。在图3和图4中由线174、176示意性地表示了两个这种引线,以及去往电源和控制源177的对应电连接。如箭头179所示,控制器架构50以以下方式在工作上联接至电源和控制源177:使得控制器架构50能够对源177进行控制,以改变在mrf操纵杆系统22的操作期间供应给em线圈166的电流或者跨该em线圈施加的电压。因此,这种结构性排布结构可使控制器架构50命令或控制mrf操纵杆阻力机构56,以改变由em线圈166产生的em场的强度。环形流道160延伸穿过em线圈166(并且可以与该em线圈大致同轴),使得当磁流变流体被引导通过mrf阀150、152时,磁流变流体穿过em场的中心。
47.mrf阀150、152的流体端口162、164分别通过上面提及的导管178、180流体地连接至对应mrf缸126、128的端口146、148。导管178、180的长度例如可以满足具有足够松弛度的柔性管,以适应结合操纵杆60的转动发生的mrf缸126、128的任何移动。在这点上,考虑图4的示例场景。在该示例中,操作员已经沿操作员输入方向(由箭头185指示)移动了操纵杆手柄110,使得操纵杆60沿顺时针方向绕坐标图例118的y轴线转动。结合该操纵杆运动,如图所示,mrf缸128绕球形接头145转动以稍微向上倾斜。而且,连同该经操作员控制的操纵杆运动,包含在mrf缸128中的活塞138、140缩回时,使得活塞端头138向图4中的左侧移动(朝着附接点132)。活塞138、140的平移移动推动磁流变流体流经mrf阀152,以适应在活塞端头138左侧的腔室的容积减小以及在活塞端头138右侧的腔室的对应容积增大。因而,在这种经操作员控制的操纵杆转动期间的任何时候,控制器架构50可以改变供应给em线圈166的电流或者跨em线圈166施加的电压,以改变抵抗流经mrf阀152的磁流变流体的力,从而获得
对活塞138、140的进一步行程变化进行抵抗的所希望的mrf阻力。
48.给定了mrf操纵杆阻力机构56的响应能力,控制器架构50可以控制阻力机构56仅短暂施加这种mrf阻力,从而以预定方式(例如,以渐进或逐步的方式)增加mrf阻力的强度,同时增加活塞的位移,或者提供各种其它阻力效果(例如,触觉止动(detent)或脉动(pulsating)效果),如下详细讨论的。控制器架构50同样可以控制mrf操纵杆阻力机构56以选择性地提供诸如以下的阻力效果:包括在mrf阀150中的活塞138、140结合操纵杆60绕坐标图例118的x轴线的转动来进行行程改变。此外,mrf操纵杆阻力机构56能够独立地改变由mrf阀150、152内的em线圈166产生的em场强度,以允许对抑制操纵杆绕坐标图例118的x轴线和y轴线转动的mrf阻力进行独立控制。
49.mrf操纵杆装置52还可以包含对操纵杆60相对于基壳62的位置或移动进行监测的一个或更多个操纵杆位置传感器182、184(例如,光学或非光学传感器或变压器)。在所示示例中,具体地,mrf操纵杆装置52包括:对操纵杆60绕坐标图例118的x轴线的转动进行监测的第一操纵杆位置传感器182(图3);以及对操纵杆60绕坐标图例118的y轴线的转动进行监测的第二操纵杆位置传感器184(图4)。操纵杆位置传感器182、184与控制器架构50之间的数据连接分别由线186、188来表示。在进一步的实现中,mrf操纵杆装置52可以包括各种其它未例示组件,如可以包括mrf操纵杆阻力机构56。在适当时候,这种组件可以包括操作员输入和被设置在操纵杆60或基壳62上的对应电连接、aff电机以及被包括在mrf操纵杆阻力机构56的流动回路中的压力传感器和/或流率传感器,以使最佳地适应特定的应用或用途。
50.如先前所强调的,仅以非限制性示例的方式提供了mrf操纵杆装置52的上述实施方式。在另选实现中,操纵杆60的构造可以在各个方面有所不同。假如mrf操纵杆阻力机构56可由控制器架构50控制以选择性地施加阻力(通过磁流变流体的在流变性方面的改变),从而抑制操纵杆沿至少一个dof相对于基壳的移动,那么在进一步的实施方式中,mrf操纵杆阻力机构56也对于图3和图4中所示的示例而有所不同。在进一步的现实化方面,可以将与em线圈166相似或相同的em感应线圈直接集成到mrf缸126、128中,以提供希望的可控的mrf阻力效果。在这种实现方面,可以通过绕活塞端头138和缸体134的内表面设置环空(annulus)或稍小的环形间隙,或者通过设置贯穿缸体134或套筒本身的流道,来经由所设置的贯穿活塞端头138的一个或更多个孔口,允许在给定mrf缸126、128内的可变容积腔室之间的磁流变流体流动。有利地,这种配置可以给予mrf操纵杆阻力机构相对紧凑的集成设计。比较地,在至少一些情况下,一个或更多个外部mrf阀(诸如mrf阀150、152(图3和图4))的使用可以促进具有成本效益的制造,并且允许使用商业可获的模块化组件。
51.还在其它实现中,mrf操纵杆装置的设计可以允许磁流变流体包裹(envelop)并直接作用在操纵杆60本身的下部(诸如在操纵杆60的情况下为球形基部112),并且em线圈绕该操纵杆的下部置放并围绕磁流变流体主体。在这种实施方式中,球形基部112可以设置有肋、槽或类似的拓扑特征,以结合操纵杆转动来促进磁流变流体的位移,其中向em线圈通电增加了磁流变流体的粘度,从而阻碍流体流经绕球形基部112设置的受限制的流道,或者还可以是因磁流变流体结合操纵杆转动的转向的缘故。在mrf操纵杆系统22的进一步的实施方式中,各种其它设计也是可以的。
52.无论mrf操纵杆阻力机构56的特定设计如何,使用选择性地产生抑制(抵抗或防止)有问题的操纵杆运动的可变mrf阻力的mrf技术都提供了多个优点。作为主要优点,在磁
流变流体的流变性方面,以及最终在高度缩短的时段(例如,在某些情况下,约为1ms的时段)内抑制操纵杆运动的mrf阻力方面;mrf操纵杆阻力机构56(并且通常是mrf操纵杆阻力机构)具有很高的响应度并可以实现em场强的希望变化。相应地,mrf操纵杆阻力机构56可以通过迅速减小流经em线圈的电流并允许磁流变流体的流变性(例如,流体粘度)恢复为该磁流变流体的正常无刺激状态,来使得能够以相等的快速性去除(或者至少极大地减小)mrf阻力。控制器架构50还可以控制mrf操纵杆阻力机构56来产生mrf阻力,以使通过利用em线圈166产生的em场的强度的对应变化而具有在限制内的连续范围的强度或密集度(intensity)。有利地,mrf操纵杆阻力机构56可以提供延长时段内的可靠的、基本无噪声的操作。另外,可以将磁流变流体配制成本质上无毒的,诸如在磁流变流体包含被分散在醇基或油基载流体中的羰基铁基颗粒的时候,如前所述。最后,作为更进一步的优点,mrf操纵杆阻力机构56的上述配置可使mrf操纵杆系统22选择性地产生第一阻力,从而制止操纵杆绕第一轴线(例如,图3和图4中的坐标图例118的x轴线)转动,同时还选择性地产生独立于第一阻力的第二阻力,从而制止操纵杆绕第二轴线(例如,坐标图例118的y轴线)转动;即,使得第一阻力和第二阻力根据需要具有不同的量值。
53.现在,参照图5,示出了由mrf操纵杆系统22的控制器架构50适当地执行的示例处理190,该示例处理190根据相对于一个或更多个虚拟边界的机具移动来选择性地改变抑制操纵杆运动的mrf阻力。处理190(下文中被称为“机具命令引导处理190”)包括多个处理步骤192、194、196、198、200、202、204、206、208、210,下面依次描述这些步骤中的各个步骤。步骤204、206、208、210被进一步分组为分级(graded)mrf力生成子处理212。根据实现机具命令引导处理190的特定方式,图5中大体上例示的各个步骤可能需要单个处理或多个子处理。此外,图5中例示的并且在下面描述的步骤是仅通过非限制性示例的方式提供的。在机具命令引导处理190的另选实施方式中,可以执行附加处理步骤、可以省略某些步骤和/或可以以另选顺序执行所例示的处理步骤。
54.响应于预定触发事件的发生,机具命令引导处理190开始于步骤192。触发事件例如可以是作业车辆(例如,图1和图2中所示的挖掘机20)的启动,或者代替地,可以是输入了请求启用机具命令引导处理190的操作员输入;例如,在一个实施方式中,操作员可以与在显示装置82上生成的gui交互以启动机具命令引导处理190。在其它情况下,当确定作业车辆从事于特定类型的作业任务(诸如挖掘或平地(grading)任务)时,控制器架构50可以自动(即,无需操作员输入)开始机具命令引导处理190。例如,对于挖掘机(例如,图1和图2所示的挖掘机20)、反铲、推土机、机动平地机或类似作业车辆的情况来说,当附接至作业车辆的铲斗、推土铲或者类似挖掘工具被降下到地面穿透位置(ground
‑
penetrating position)时、当作业车辆的稳定器臂被降下时(在反铲的情况下)或者当操作员提供指示即将进行的挖掘操作的输入时,控制器架构50可以自动开始机具命令引导处理190。作为进一步的可能性,控制器架构50可以响应于检测到不同预定条件或事件而开始机具命令引导处理190。作为另一示例,在围绕或相邻所检测到的障碍物建立虚拟边界的实现中,当作业车辆上的传感器(例如,被包括在图1所示的非操纵杆传感器76中)检测到作业车辆附近的邻近障碍物时,控制器架构50可以开始机具命令引导处理190。
55.在启动机具命令引导处理190之后,控制器架构50进行至步骤194,并且收集在执行处理190的其余部分中所利用的有关非操纵杆数据输入。这种数据输入通常将包括接收
当前机具跟踪数据,该机具跟踪数据用于监测经操纵杆控制的机具或工具相对于作业车辆的车身或底盘的位置。因此,对于挖掘机20的情况来说,在机具命令引导处理190的步骤194期间,可以在控制器架构50处接收来自动臂组件跟踪传感器72的数据。然后,控制器架构50利用该数据来估计在相邻挖掘机底盘28的3d空间容积或“工具空间”中,接合至动臂组件24的外部终端的铲斗26(或者其它机具)的位置。如上所述,这种机具跟踪数据可以包括由加速度计、陀螺仪、磁力计或者其它这种mems装置(例如,作为imu的封装)所捕获的数据、来自倾斜仪的数据或者来自布置在动臂组件24上的类似传感器的数据。另外或者另选地,可以结合已知的运动学(有关组件尺寸)来考虑绕动臂组件24的枢轴接头的角位移和/或液压缸38、40、42的线性位移,以估计铲斗26在3d工具空间中的位置移动。作为进一步的可能性,在实施方式中,对于机具移动,也可以利用来自由视觉系统所捕获的一个或更多个视频馈送的图像分析。通常,然后,在机具命令引导处理190的步骤194期间,可以通过控制器架构50收集适于跟踪定位的任何类型的数据,而且还可以收集可移动机具在3d空间中的取向。
56.也可以在步骤194期间收集其它数据,并由控制器架构50在3d工具空间内建立一个或更多个虚拟边界的位置、方向和/或几何形状时加以考虑,如在分级mrf力生成子处理212(下面所描述的)期间进一步考虑的。这可以包括由车载传感器(例如,图1所示的挖掘机20的非操纵杆传感器70)所提供的与局部地面高度、地面斜度(slope)和/或其它地形特征有关的数据,如同可以利用测距设备或者被集成到作业车辆中的其它传感器确定的那样。当例如利用局部地面高度作为基准点建立至少一个虚拟边界(例如,下面描述的挖掘基底)的位置时,这种数据可能是有用的。与虚拟边界有关的操作员输入数据也可以经由操作员接口80进行输入,并且在执行处理190时,在步骤194期间由控制器架构50加以进一步考虑。这种操作员输入例如可以指定一个或更多个虚拟边界的希望位置和/或取向,诸如虚拟挖掘基底的地下深度(可能还有斜度)、虚拟天花板的地上高度或者指示希望的定位(并且可能还有取向)或者一个或更多个虚拟边界的其它数据。
57.在其中作业车辆配备有坡度控制系统(诸如示例挖掘机20(图1)的坡度控制系统74)的实施方式中,可以将来自坡度控制系统的数据提供给控制器架构50;例如经由放置在车辆总线84上。然后,控制器架构50可以利用这种数据(本文中被称为“坡度目标数据”),以利用由坡度控制系统74提供的数据来建立虚拟挖掘基底的位置和取向(以及在虚拟挖掘基底为三维或非平面时的几何形状)。因此,在这种实现中,所讨论的作业车辆(例如,推土机或机动平地机)可以相对于虚拟挖掘基底移动,同时操作员利用有关的一个或多个操纵杆装置来重复定位作业车辆机具(例如,推土铲),以受控方式使下方泥土(或其它物料)移位,从而创建总体上与虚拟挖掘基底相符的所希望的表面拓扑。作为更进一步的可能性,当将这种数据用于生成下述虚拟边界时,可以在步骤194期间收集指示任何邻近障碍物的位置的数据,举例来说,如阻拦机具与附近障碍物之间的意外接触的禁入区(keep out zone)或虚拟屏障。再次,这种障碍物检测数据可以由合适传感器阵列(举例来说,如在图1所示的附加传感器76中包括的传感器阵列)来提供,该传感器阵列对从作业车辆附近的障碍物反射的能量信号(例如,激光脉冲、声学脉冲或雷达脉冲)进行测量。
58.进行至机具命令引导处理190的步骤198,控制器架构50接收指示所考虑的一个或多个mrf操纵杆装置的当前操纵杆移动和位置的数据。在示例挖掘机20的情况下,控制器架构50从操纵杆位置传感器182、184接收数据,该数据描述装置52、54中所包括的相应操纵杆
60的移动。控制器架构50利用该数据来确定在机具命令引导处理190的当前迭代期间是否发生了一个或更多个操纵杆的操作上显著(operationally
‑
significant)的移动。如果检测到这种操纵杆移动,则控制器架构50进行至分级mrf力生成子处理212,如下所述。否则,控制器架构50前进至步骤200,并且确定机具命令引导处理190的当前迭代是否应当终止;例如,由于作业车辆停机、由于经操纵杆控制的功能的持续不活动达预定时段、或者由于响应于处理190在步骤192初始开始的条件或触发事件的去除。如果确定机具命令引导处理190应当在步骤200终止,则控制器架构50前进至步骤202,因此,处理190终止。如果相反地确定机具命令引导处理190应当继续,则控制器架构50返回至步骤194,并且上述处理步骤重复。
59.响应于在步骤202检测到操作上显著的操纵杆转动(或者其它操纵杆移动),控制器架构50前进至机具命令引导处理190的分级mrf力生成子处理212。如在图5中指示的,控制器架构50可以例如基于机具(例如,挖掘机20的铲斗26)到由控制器架构50在现实3d空间容积中所建立的一个或更多个虚拟边界的接近度,在子处理模块212期间向mrf操纵杆阻力机构56发出命令,以生成阻力或刚度响应的范围。在这点上,并且如下更全面讨论的,可以执行分级mrf力生成子处理212,以提供针对相对于一个或更多个虚拟边界的机具移动的mrf阻力响应的范围,这种范围可以限定或接界(boarder)将经操纵杆控制的机具如所希望地约束在内的可操作包络。在其它不太复杂的实现中,控制器架构50可以控制mrf阻力机构56以提供单个触觉反馈效果,该单个触觉反馈效果例如指示相对于一个或更多个虚拟边界的机具运动。例如,在一种简化的方法中,控制器架构50可以在检测到机具违反虚拟边界时向mrf阻力机构发出命令,以生成有感觉的止动、短暂的脉动阻力效果或者类似效果。类似地,在其它实施方式中,控制器架构50可以控制mrf操纵杆阻力机构56,以便以其它方式来提供单个经mrf施加的效果(而不是以下所述类型的分级或逐渐改变的mrf阻力响应)来阻拦虚拟边界违反;例如,控制器架构50可以在机具违反虚拟边界时或者恰好在机具违反虚拟边界之前,向mrf操纵杆阻力机构56发出命令,以生成防止或阻碍与当前操作员输入方向对应的进一步经操纵杆控制的机具移动的最大mrf阻力。
60.在执行分级mrf力生成子处理212中,控制器架构50可以任何合适方式确定虚拟边界的定位。在某些情况下,并且如上所讨论的,控制器架构50可以利用经由操作员界面80接收到的操作员输入数据,来建立虚拟边界的定位。这种操作员输入例如可以指定挖掘基底的竖直(例如,地下)深度,该竖直深度是在作业任务期间将经操纵杆控制的机具如所希望地维持在挖掘基底上方的竖直深度。控制器架构50可以沿着竖直轴线(平行于重力)从任何合适空间基准点(诸如局部地面高度)来测量这种地下深度。类似地,操作员输入可以指定将机具如所希望地维持在虚拟天花板下方的竖直(例如,地上)高度。在某些情况下,mrf操纵杆系统22还可以允许操作员经由与操作员界面80的交互来调节这种虚拟边界的斜度或取向;例如,通过与在显示装置82上生成的gui进行交互以设定虚拟挖掘基底的坡度或斜度,如下面结合图6所描述的。仍在其它情况下,可以利用由坡度控制系统(诸如图1所示的示例挖掘机20上的坡度控制系统74)提供的数据,来确定这种虚拟边界或挖掘基底的定位,其中虚拟挖掘基底具有2d(平面)或3d(非平面)几何形状,该2d或3d几何形状通常符合由坡度控制系统所提供的目标坡度数据。
61.在进一步的实现中,并且还如上所讨论的,可以利用由所考虑的作业车辆上的障
碍物检测系统提供的数据,来确定一个或多个虚拟边界的定位。例如,在示例挖掘机20的情况下,控制器架构50可以利用从(例如,障碍物检测)传感器76接收到的数据,来建立一个或更多个虚拟边界,将这些虚拟边界在空间上定位成,降低在经操纵杆控制的机具与检测到的障碍物(诸如结构的侧壁、另一作业车辆或者该作业车辆附近的另一实物)之间发生意外接触的可能性。例如,在利用挖掘机20或另一作业车辆来针对该邻近障碍物采挖沟渠或其它相邻挖掘特征时,这是有用的。在其它情况下,控制器架构50可以在建立一个或多个虚拟边界的空间位置时从存储器48调用障碍物位置或地图数据,这些虚拟边界的空间位置是在执行子处理212时要利用的。然后,控制器架构50可以利用这样存储的地图数据,以在机具与任何所映射的障碍物(例如,埋入的导管,埋入的电气管道、输电线等)之间建立虚拟边界,从而帮助维持针对机具与障碍物之间的禁入区的希望空间偏移,或者以其它方式减小在利用图1所述的示例挖掘机20进行作业任务(诸如采挖沟渠或者其它挖掘特征)时与这种障碍物发生意外接触的可能性。
62.在分级mrf力生成子处理212的步骤204,控制器架构50确定沿操作员输入方向的持续操纵杆转动是否会导致经操纵杆控制的机具濒临违反虚拟边界。在实施方式中,控制器架构50可以在步骤204期间确定机具的任何部分(在示例性挖掘机20的情况下,可以是动臂组件24)是否会违反虚拟边界。在其它实现中,控制器架构50可以仅考虑经操纵杆控制的机具的特定部分(诸如机具的刃口)目前是否正在违反所考虑的虚拟边界或者具有濒临违反所考虑的虚拟边界的风险。在做出这个确定时,控制器架构50可以利用任何合适处理或空间建模技术(上面已经概述了其中的几个示例),来跟踪机具在3d空间中相对于一个或更多个虚拟边界的移动。如果在子处理212的步骤204期间,确定沿操作员输入方向的持续操纵杆转动(或者其它运动)会导致经操纵杆控制的机具濒临违反虚拟边界,则控制器架构50向mrf阻力机构56发出命令,以生成抑制沿操作员输入方向的持续操纵杆转动的mrf阻力。在实现中,控制器架构50可以向mrf操纵杆阻力机构56发出命令,以生成尝试阻止沿操作员输入方向的进一步操纵杆转动的最大mrf阻力;或者至少要使操纵杆沿操作员输入方向的持续转动相对困难。因此,无论是由于物理上防止沿有问题的方向的操纵杆运动,还是由于向操作员传达了非常明显的触觉信号以终止沿有问题的方向的持续操纵杆转动,都可以避免机具违反虚拟边界。在施加所希望的mrf阻力效果之后(步骤200),然后,控制器架构50前进至步骤200,以确定机具命令引导处理190是应继续还是终止。
63.相反,如果在步骤204期间,确定沿操作员输入方向的持续操纵杆转动不会导致经操纵杆控制的机具濒临虚拟边界违反,则控制器架构50进行至分级mrf力生成子处理212的步骤206。在步骤206期间,控制器架构50评估沿操作员输入方向的持续操纵杆转动是否会使机具达到与虚拟边界的预定接近度。如果确定情况不会如此,则控制器架构50前进至步骤200,并且再次考虑处理190的当前迭代是否应当终止。否则,控制器架构进行中步骤210,并且向mrf操纵杆阻力机构56发出命令,以生成增加阻碍沿操作员输入方向的操纵杆运动的mrf阻力。这样做时,mrf操纵杆系统22生成直观触觉提示(如通过有关的操纵杆装置传达给操作员),该触觉提示指示经操纵杆控制的机具正在接近虚拟边界。如果尚未施加这种mrf阻力,则控制器架构50可以向mrf操纵杆阻力机构56发出命令,以初始生成制止操纵杆沿操作员输入方向的进一步转动的mrf阻力。相反,如果先前已施加了这种mrf阻力,则控制器架构50可以向mrf操纵杆阻力机构56发出命令,以增加mrf阻力的量值。在后一种情况下,
可以以渐进(逐步或连续)的方式将mrf阻力增加到沿操作员输入方向的操纵杆转动继续并且经操纵杆控制的机具渐增地朝着所考虑的虚拟边界移动的程度。通过步骤210的多次迭代,控制器架构50可以向mrf操纵杆阻力机构56发出命令,以改变mrf阻力,使得随着机具接近或逼近虚拟边界,mrf阻力与机具和虚拟边界之间的间隔距离大致成比例地增加。在步骤210之后,控制器架构50进行至步骤200,并再一次确定处理190的当前迭代是应终止还是继续。
64.在以刚才描述的方式重复执行机具命令引导处理190时,mrf操纵杆系统22的控制器架构50至少部分地基于相对于一个或更多个虚拟边界的机具移动,来选择性地命令mrf操纵杆阻力机构56改变抵抗操纵杆运动的mrf阻力。这样做时,mrf操纵杆系统22向作业车辆操作员提供机具命令引导(举例来说,如直观触觉提示),以在适当时候减慢(若未停止的话)操纵杆沿操纵员输入方向的移动,从而违反防止虚拟边界。此外,在控制器架构命令mrf操纵杆阻力机构生成最大mrf阻力的情况下,mrf阻力能足以使沿操作员输入方向的操纵杆运动变得非常困难,或者还可以在物理上阻止沿有问题的方向的持续操纵杆移动。按这种方式,mrf操纵杆系统22可以帮助操作员经由一个或更多个操纵杆装置来控制机具,例如为地形赋予所希望的坡度或拓扑、将挖掘特征采挖至希望的尺寸(例如,希望的深度或斜度)、减少机具与附近障碍物之间发生不希望的撞击的可能性、和/或提供有用于引导被安装至作业车辆的经操纵杆控制的机具的各种其它功能。为了完整性,下面结合图6进一步描述在示例挖掘机20的操作期间可以有利地执行机具命令引导处理190的示例用例场景。
65.图6阐述了示例场景,其中上述挖掘机20被用于执行采挖或挖掘任务,以在作业区域的地面214内创建挖掘特征216。在该示例中,在如水平线220所表示的3d工具空间中,mrf操纵杆系统22的控制器架构50已经建立了下虚拟边界或挖掘基底。mrf操纵杆系统22能在采挖深度限制模式下操作,以防止(或者至少制止)操作员控制经动臂组件附接的机具(在此,附接至挖掘机动臂组件24的铲斗26)以将挖掘特征216采挖至过深的深度。可以根据从存储器48调用的数据并且参考挖掘机20的当前位置(例如从挖掘机20上的gps模块确定的),来建立挖掘基底220的位置以及可能还有取向。另选地,可以根据经由操作员界面80(图1)输入到mrf操纵杆系统22中的操作员输入数据来建立挖掘基底220的位置。例如,在实施方式中,操作员可以输入虚拟挖掘基底220如所希望地被定位于的地下水平面或“设定的挖掘深度”。如上所示,这种地下深度;例如,从局部地面高度基准点218沿着竖直轴线224在向下方向上测量出的深度,该深度大致平行于重力的方向。为了建立该基准点,控制器架构50可以利用适当传感器(例如,传感器76中包括的基于激光的传感器或测距设备)来测量局部地面高度;利用校准处理确定局部地面高度,在该校准处理中,操作员控制动臂组件24以将铲斗26搁在地面上,其中控制器架构50接着利用来自动臂组件跟踪传感器72的数据以及动臂组件24的已知运动学来计算局部地面高度;或者将局部地面高度估计为相对于作业车辆底盘的默认设定。
66.除了或者代替建立虚拟挖掘基底220,mrf操纵杆系统22的控制器架构50可以建立在随后挖掘任务期间参考的任何数量的附加虚拟边界。例如,在实施方式中,控制器架构50还可以建立上边界或虚拟天花板226,将机具26(并且或许动臂组件24的所有部分)如所希望地维持在该上边界或虚拟天花板226下方。控制器架构50可以以任何合适方式(包括基于操作员输入或者由挖掘机20上的障碍物检测系统提供的数据),来建立虚拟天花板的位置。
在一种方法中,例如,mrf操纵杆系统22可以接收指定虚拟天花板226的希望地上高度(如沿着平行于重力方向延伸的竖直轴线228测量出的)的操作员输入。然后,可以以与上述类似的方式,执行基于与虚拟天花板226的机具接近度来改变mrf操纵杆刚度或阻力的上述处理。虚拟天花板226的设置可以有用于以下实施方式:其中挖掘机20(或者另一作业车辆)在封闭环境(诸如谷仓或矿井)中操作,或者当挖掘机20在存在高架障碍物(例如,树枝或悬垂的结构性特征)的室外环境中操作时。
67.在各种实现中,在生成虚拟挖掘基底220和虚拟天花板226中的任一个或两个时,mrf操纵杆系统22的控制器架构50利用由动臂组件跟踪传感器72提供的数据来跟踪挖掘工具(在这里,挖掘机铲斗26)相对于这些虚拟边界或阈值的位置。如先前在上面结合处理190的步骤194所讨论的,动臂组件跟踪传感器74可以包括对挖掘工具相对于挖掘机20的底盘或者其它固定基准点的移动进行监测的任何类型和数量的传感器。例如,在一种方法中,将旋转位置传感器集成到动臂组件24的枢轴接头中;并且将由旋转位置传感器结合动臂组件24的已知尺寸捕获的角位移读数用于跟踪挖掘工具(铲斗26)的位置,并且还可以专门跟踪铲斗26的刃口在3d工具空间中的位置。除了或代替这种转动位置读数,还可以考虑其它传感器输入,诸如被集成到动臂组件24中的液压缸38、40、42的线性位移、基于惯性的传感器(inertia
‑
based sensor)读数(如由被并入动臂组件24中的mems装置(诸如mems加速度计或陀螺仪)捕获的)、由传感器捕获的指示挖掘机底盘28的当前取向的测量结果。
68.不管对铲斗26进行跟踪的特定方式如何,控制器架构50都重复预测挖掘机动臂组件24的经操作员命令的移动何时会导致铲斗26违反虚拟挖掘基底220(或虚拟天花板226)。当确定挖掘机动臂组件24的经操作员命令的移动会导致违反虚拟挖掘基底220时,控制器架构50向mrf操纵杆阻力机构56发出命令,以生成制止(或者可以是尝试阻止)沿操作员输入方向的持续操纵杆移动的mrf阻力。这为作业车辆操作员提供了直观触觉提示,以减慢(若未停止的话)操纵杆沿操作员输入方向的移动。此外,在控制器架构50命令mrf操纵杆阻力机构56生成最大mrf阻力的情况下,mrf阻力能足以完全阻止沿操作员输入方向的操纵杆运动(或者至少使这种操纵杆的运动变得相对困难)。另外或者另选地,假设铲斗26处于基底220的预定距离内,控制器架构50也可以向mrf操纵杆阻力机构56发出命令,以随着铲斗26与虚拟挖掘基底220的接近度的增加而渐进地增加mrf阻力。针对铲斗26相对于虚拟天花板226的移动,同样地可以应用类似的处理,以帮助将铲斗26(以及可能还有吊臂组件24的其它部分)维持在虚拟天花板226下方。
69.在其它实施方式中,除了或代替上述虚拟挖掘基底220,mrf操纵杆系统22还可以使得操作员能够建立挖掘特征的其它虚拟(例如,2d平面或3d非平面)边界。例如,在某些情况下,控制器架构50可以在给定挖掘操作期间防止违反挖掘特征的虚拟侧壁,诸如沟渠的背面。在图6中进一步指示了这种可能性。其中所例示的挖掘特征或沟渠被赋予了背面222,该背面222相对于平行于重力方向延伸的竖直线224形成希望的角度(θ
bf
)。在挖掘机20的操作期间,随着操作员驾驶挖掘机采挖挖掘特征216,mrf操纵杆系统可以选择性地增加被施加至用于控制动臂组件移动的操纵杆60(图1和图2)的mrf阻力,防止或至少制止背面222被穿透。因此,可以生成触觉提示并且通过适当的操纵杆装置进行传达,以帮助操作员将挖掘特征216的表面形成为具有希望的角度。对于沟渠背面222的情况来说,假设操作员不能从挖掘机20的驾驶室32直接观察背面222,这就可能是特别有用的。类似地,在实施方式中,可
以经由虚拟采挖基底220来限定希望的坡度,或者还可以是非平面的3d几何形状,其中,mrf操纵杆系统接着应用mrf阻力的变化,以帮助操作员控制动臂组件24采挖挖掘特征216,从而符合希望的采挖基底。在配备有集成坡度控制(igc:integrated grade control)系统的其它作业车辆(例如,推土机或机动平地机)的情况下,可以利用类似的方法来提供触觉提示,以帮助操作员创建希望的梯度,如下结合图7进一步讨论的。
70.有利地配备有mrf操纵杆系统的作业车辆的附加示例
71.因此,前面的内容已经描述了通过阻碍沿一个或更多个dof的操纵杆运动的mrf阻力的关键变化来提供机具命令引导的mrf操纵杆系统的示例。虽然前面的描述主要专注于包括特定类型的经操纵杆控制的机具的、特定类型的作业车辆(挖掘机),但是本文所描述的mrf操纵杆系统的实施方式适合于集成到包含用于控制机具的移动的操纵杆装置的宽范围的作业车辆中,诸如附接至铰接动臂组件的终端的铲斗(或其它机具)的移动,附接至fel组件的终端的铲斗的移动,或者可移动地接合至机动平地机、推土机或另一作业车辆的底盘的推土铲的移动,仅列出几个例子。图7的左部例示了示例工作车辆,右部例示了示例mrf操纵杆装置。具体地图7左部阐述了这种作业车辆的三个附加示例,并且包括履带式挖掘机230、机动平地机232以及反铲装载机234。
72.首先针对履带式推土机230,履带式挖掘机230可以配备有被置放在挖掘机230的驾驶室238内的示例mrf操纵杆装置236。mrf操纵杆装置236中包括的操纵杆240的操作员移动可以定位推土机230的推土铲242,该推土铲242经由推架248和多个液压缸250、252枢转地接合至推土机底盘244和履带式底架246。具体地,在履带式推土机230的操作期间,操纵杆240相对于mrf操纵杆装置236的基壳的转动可以经由俯仰缸250和升降缸252的伸出和缩回来定位铲242。可以将上面结合图1描述的各种组件的类似物集成到履带式推土机230中,以向操纵杆输入提供经mrf施加的引导,该操纵杆输入用于以上述方式控制推土铲242(更一般地,“挖掘机具”或“工具”)的移动和定位。例如,在履带式推土机230配备有坡度控制系统的一个实现中,包括mrf操纵杆装置236的mrf操纵杆系统可以改变操纵杆刚度,以帮助操作员随着履带式推土机230在作业区域内移动来对铲242进行定位以实现希望的坡度。
73.接下来转至示例机动平地机232,在机动平地机232的驾驶室256内置放了两个mrf操纵杆装置254。mrf操纵杆装置254中包括的操纵杆258的转动对悬吊在圆环(circle)262下方的铲260进行定位,该圆环262被安装在机动平地机232的前架264的下方。共同地,铲260和圆环262形成铲
‑
圆环组件(blade
‑
circle assembly)260、262。在这种情况下,操纵杆258相对于它们相应底基壳的转动可以经由圆环旋转电动机266的转动连同液压缸268的行程改变(伸出和缩回)来控制铲位置260。在机动平地机232的操作期间,mrf操纵杆系统选择性地改变抵抗操纵杆258的转动的mrf阻力,以引导机具移动,并且具体为引导操纵杆移动,从而控制铲
‑
圆环组件260、262的转动、铲
‑
圆环组件260、262的角度调节、以及铲260的侧移角度的调节。以类似于履带式推土机230的方式,机动平地机232可以配备有igc系统(或者翻新坡度控制系统),随着机动平地机232在作业区域上行驶,该igc系统为mrf操纵杆系统的控制器架构提供指示希望坡度的数据。然后,mrf操纵杆系统利用由坡度控制系统所提供的目标坡度数据,来建立与该希望坡度对应的虚拟边界,并且至少部分地基于相对于虚拟边界的机具移动来改变被施加至操纵杆258的mrf阻力。按这种方式,当在适当时候对铲260进行定位以实现希望的目标坡度时,向操作员提供直观的触觉反馈。
74.最后参照图7的最底部所描绘的反铲装载机234,可以在反铲装载机234的驾驶舱272中置放一个或更多个mrf操纵杆装置270。在该示例中,可以将一个或多个mrf操纵杆装置270中包括的一个或多个操纵杆274的转动用于进行如下操作:控制fel组件276的移动,该fel组件276端接于fel铲斗278并且被接合至装载机底盘280的前端;控制反铲组件282的移动,该反铲组件282端接于fel铲斗284并且被接合至装载机底盘280的后端;或者这两者。mrf操纵杆装置270可以由如上所述的mrf操纵杆系统进行控制,以帮助操作员控制fel组件276、反铲组件282或者这两者,以将挖掘特征采挖至希望的尺寸(例如,希望的深度)、避免与附近障碍物的无意中接触、或者执行其它功能。具体地,在反铲组件282的情况下,反铲装载机234上的mrf操纵杆系统可以改变mrf操纵杆装置270的mrf阻力,以以类似于上面结合图1和图2中示出的示例挖掘机所讨论的方式来引导机具移动。比较地,在fel组件276的情况下,当反铲装载机234在谷仓或另一封闭结构内部进行操作时,mrf操纵杆系统还可以增加mrf操纵杆装置270的mrf阻力,以例如防止(或至少阻拦)操作员操纵杆命令使fel铲斗278达到高于虚拟天花板的升起位置。
75.作业车辆mrf操纵杆系统的列举示例
76.为了便于参考,还提供了作业车辆mrf操纵杆系统的以下示例并对进行了编号。
77.1.在实施方式中,一种作业车辆mrf操纵杆系统,所述作业车辆mrf操纵杆系统包括:操纵杆装置、机具跟踪数据源、mrf操纵杆阻力机构以及控制器架构。所述操纵杆装置又包括:基壳;操纵杆,所述操纵杆被安装至所述基壳并且能够相对于所述基壳移动;以及操纵杆位置传感器,所述操纵杆位置传感器被配置成,能够相对于所述基壳的操纵杆移动进行监测。所述机具跟踪数据源被配置成,在所述作业车辆的操作期间跟踪所述机具的移动,同时所述mrf操纵杆阻力机构能够被控制以改变阻碍相对于所述基壳的操纵杆移动的mrf阻力。联接至所述mrf操纵杆阻力机构、所述操纵杆位置传感器以及所述机具跟踪数据源的所述控制器架构被配置成:(i)利用由所述机具跟踪数据源提供的数据来跟踪所述机具相对于虚拟边界的移动;以及(ii)至少部分地基于相对于所述虚拟边界的机具移动,命令所述mrf操纵杆阻力机构改变所述mrf阻力。
78.2.根据示例1所述的作业车辆mrf操纵杆系统,其中,所述作业车辆配备有坡度控制系统。所述控制器架构联接至所述坡度控制子系统,并且所述控制器架构被配置成,利用由所述坡度控制系统所提供的坡度目标数据来限定所述虚拟边界。
79.3.根据示例2所述的作业车辆mrf操纵杆系统,其中,所述作业车辆包括推土机或机动平地机,所述机具采取铲的形式,并且所述虚拟边界限定了虚拟挖掘基底。
80.4.根据示例1所述的作业车辆mrf操纵杆系统,其中,所述虚拟边界采取虚拟挖掘基底的形式。此外,所述控制器架构还被配置成,在所述机具移动通过的3d工具空间中建立所述虚拟挖掘基底的位置和取向。
81.5.根据示例4所述的作业车辆mrf操纵杆系统,其中,所述控制器架构至少部分地基于设定的挖掘深度以及地面高度基准点,来建立所述虚拟挖掘基底的位置。
82.6.根据示例4所述的作业车辆mrf操纵杆系统,其中,所述控制器架构至少部分地基于操作员输入来建立所述虚拟挖掘基底的取向,所述操作员输入指示利用所述机具如所希望地创建的挖掘特征的目标坡度。
83.7.根据示例1所述的作业车辆mrf操纵杆系统,其中,所述控制器架构被配置成,随
着所述机具到所述虚拟边界的接近度的增加而逐渐地增加所述mrf阻力。
84.8.根据示例1所述的作业车辆mrf操纵杆系统,其中,所述控制器架构被配置成:(i)检测在操作员输入方向上的操纵杆移动;(ii)当检测到在所述操作员输入方向上的操纵杆移动时,确定沿所述操作员输入方向的持续操纵杆移动是否会导致所述机具立即违反所述虚拟边界;并且(iii)在确定沿所述操作员输入方向的持续操纵杆移动会导致濒临或者立即违反所述虚拟边界时,向所述mrf操纵杆阻力机构发出命令,以生成最大mrf阻力,以在实质上停止沿所述操作员输入方向的持续操纵杆移动。
85.9.根据示例8所述的作业车辆mrf操纵杆系统,其中,所述控制器架构还被配置成:(i)在确定沿所述操作员输入方向的持续操纵杆移动不会导致立即违反所述虚拟边界时,进一步确定沿所述操作员输入方向的持续操纵杆移动是否会使所述机具达到与所述虚拟边界的预定接近度;并且(ii)在确定沿所述操作员输入方向的持续操纵杆移动会使所述机具达到与所述虚拟边界的预定接近度时,向所述mrf操纵杆阻力机构发出命令,以生成阻碍沿所述操作员输入方向的持续操纵杆移动的、比所述最大mrf阻力小的mrf阻力。
86.10.根据示例1所述的作业车辆mrf操纵杆系统,其中,所述控制器架构被配置成:(i)检测在操作员输入方向上的操纵杆移动;(ii)当检测到在所述操作员输入方向上的操纵杆移动时,确定沿所述操作员输入方向的持续操纵杆移动是否会导致所述机具立即违反所述虚拟边界;并且(ii)在确定沿所述操作员输入方向的持续操纵杆移动会导致立即违反所述虚拟边界时,向所述mrf操纵杆阻力机构发出命令,以随着所述机具越过所述虚拟边界而生成止动效果或脉动效果。
87.11.根据示例1所述的作业车辆mrf操纵杆系统,其中,所述作业车辆包括动臂组件,所述动臂组件具有所述机具附接至的终端。所述控制器架构被配置成:(i)监测所述动臂组件的经操纵杆命令的移动;以及(ii)至少部分地基于所述动臂组件的所述经操纵杆命令的移动,来确定所述操纵杆的沿所述操作员输入方向的持续移动是否会导致违反虚拟边界。
88.12.根据示例11所述的作业车辆mrf操纵杆系统,其中,所述虚拟边界包括虚拟天花板,所述机具被如所希望地保持在所述虚拟天花板下。
89.13.根据示例12所述的作业车辆mrf操纵杆系统,所述作业车辆mrf操纵杆系统还包括操作员界面,所述操作员界面联接至所述控制器架构。所述控制器架构被配置成,至少部分地基于操作员数据来定位所述虚拟天花板,所述操作员数据指定由操作员经由所述操作员界面输入的天花板高度。
90.14.根据示例1所述的作业车辆mrf操纵杆系统,其中,所述控制器架构还被配置成:(i)估计障碍物的相对于所述作业车辆的空间位置;以及(ii)至少部分地基于所述障碍物的所估计的空间位置来建立所述虚拟边界的位置,使得所述虚拟边界位于所述机具与所述作业车辆之间。
91.15.根据示例1所述的作业车辆mrf操纵杆系统,其中,所述控制器架构被配置成,向所述mrf操纵杆阻力机构发出命令,以改变所述mrf阻力,使得随着所述机具接近所述虚拟边界,所述mrf阻力与所述机具和所述虚拟边界之间的间隔距离大致成比例地增加。
92.结论
93.因此,已经描述了mrf操纵杆系统的实施方式,该mrf操纵杆系统通过智能地施加
的经mrf施加的力的变化来引导作业车辆机具的经操纵杆控制的定位。在各种实现中,mrf操纵杆系统可以基于相对于一个或更多个虚拟边界的机具移动来选择性地阻碍或抑制操纵杆运动。这又可以帮助或引导操作员在利用一个或更多个操纵杆进行操纵时,以更高的精度、提高的效率以及在某些情况下以降低机具与任何附近障碍物之间发生不希望的撞击的可能性来命令机具移动。在实施方式中,虚拟边界可以部分地限定或接界可操作包络,从而在诸如挖掘任务的特定作业任务期间,将机具如所希望地维持在在该可操作包络内。在其它实现中,可以将虚拟边界生成为符合或大致符合被希望赋予作业车辆(例如,推土机或机动平地机)所行驶于的地表的最终坡度拓扑或轮廓,在该情况下,可以利用作业车辆上的坡度控制系统(若存在的话)来限定一个或多个虚拟边界。仍在其它情况下,可以将虚拟边界用于设定其它阈值,这些阈值限定了经操纵杆控制的机具如所希望地不会侵入的禁入范围或区域;举例来说,如当在埋入物、地上结构或者其它障碍物周围建立一个或更多个虚拟边界时,该虚拟边界如所希望地防止附接至作业车辆的机具无意中在这种障碍物附近操作。
94.如本文所用,除非上下文另外明确指示,否则单数形式的描述旨在包括复数形式。还应理解,当在本文中使用时,术语“包括(comprise和/或comprising)”指定存在规定特征、要件、步骤、操作、要素和/或组件,而非排除存在或增加一个或更多个其它特征、要件、步骤、操作、要素、组件和/或这些的组合。
95.已经出于例示和描述的目的,呈现了本公开的描述,但并非旨在排它或按所公开的形式对本公开进行限制。在不脱离本公开的范围和精神的情况下,许多修改和变型对于本领域普通技术人员将是显而易见的。选择和描述在本文中明确引用的实施方式,以便最好地解释本公开的原理及其实际应用,并且使得本领域普通技术人员能够理解本公开并且认识针对所描述的示例的许多另选例、修改例以及变型例。因此,除了明确描述的实施方式和实现以外的其它各种实施方式和实现都处于所附权利要求的范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。