1.本发明属于无人机相关领域,尤其涉及一种无人机的群发射系统。
背景技术:
2.众所周知,无人机的发射方式有手抛发射、起落架滑跑起飞、母机空中发射、容器式发射装置发射和垂直起飞等,虽然目前无人机虽然能够从多种平台上进行发射和回收,但是大部分无人机发射平台一个发射平台只能对一个无人机进行发射,发射效率低,占地面积大,当需要短时间发射大量无人机消耗的时间较长,且需要现场指挥无人机依次发射,防止无人机发射之间相互干涉,导致产生发射事故造成不必要的资源浪费。
技术实现要素:
3.本发明的目的是针对现有的技术存在上述问题,提出了一种无人机的群发射系统,本无人机的群发射系统能进行无人机的不间断且均匀有序的发射。
4.本发明的目的可通过下列技术方案来实现:一种无人机的群发射系统,包括壳体,所述壳体内部左侧设有起落腔,所述起落腔内设有无人机起落装置,所述起落装置用于依次抬升无人机到起飞位置,所述壳体右侧壁上设有无人机群存储装置,所述壳体内部设有升降腔,所述升降腔内设有无人机提升装置,所述无人机提升装置用于依次升降无人机,所述壳体底部设有载板收集腔,所述载板收集腔用于收集承载无人机的板块。
5.优选的,所述无人机起落装置包括固定设置在所述壳体内部左侧壁上的滑台,所述滑台下侧面上固定设有起落电机固定箱,所述起落电机固定箱内部固定设有起落电机,所述起落电机的输出端上设有起落电机轴,所述起落电机轴上固定设有宽直齿轮,所述滑台上滑动设有l型滑块,所述l型滑块上侧面上固定设有起落台,所述l型滑块与所述滑台上分别固定设有滚子固定块,所述每对滚子固定块之间转动设有滚子轴,所述每个滚子轴上固定设有圆锥滚子,所述滑台上固定设有支撑轴,所述支撑轴上转动设有锥形轮,所述锥形轮上固定设有齿环,所述齿环与所述宽直齿轮滑动且啮合,所述圆锥滚子与锥形轮啮合。
6.优选的,所述无人机提升装置包括固定在所述壳体内部底面上的升降电机固定箱,所述升降电机固定箱内部固定设有升降电机,所述升降电机的输出端上设有升降电机轴,所述升降电机轴上固定设有半齿锥齿轮,所述壳体与所述升降电机固定箱上转动设有滚珠丝杆,所述滚珠丝杆上固定设有锥齿轮,所述锥齿轮与所述半齿锥齿轮啮合。
7.优选的,所述滚珠丝杆上转动设有多个滑块螺母,所述滑块螺母上固定设有升降板,所述升降腔的上侧壁与所述壳体内部上侧壁上分别固定设有滑动管固定板,所述每个滑动管固定板上固定设有滑动管,所述滑块螺母与所述滑块螺母滑动连接,所述壳体内部右侧壁上固定设有小电动推杆,所述小电动推杆前端固定设有u型推块。
8.优选的,所述无人机群存储装置包括固定设置在所述壳体外部右侧壁上的无人机存储箱,所述无人机存储箱内部左右两侧壁上均匀设有弹簧卡扣,所述无人机存储箱内部均匀滑动设有载板,所述每个载板上设有无人机。
9.优选的,所述壳体内部设有拨杆腔,所述拨杆腔上固定设有两个传送带轮,所述两个传送带轮之间连接有传送带,所述壳体后侧壁上固定设有拨杆箱,所述拨杆箱内部固定设有旋转电机,所述旋转电机的输出端上设有旋转电机轴,所述旋转电机轴上固定设有推杆固定块,所述推杆固定块上固定设有大电动推杆,所述大电动推杆与所述升降电机固定箱转动连接,所述大电动推杆上固定设有拨杆,所述拨杆与所述壳体后侧壁上的滑槽滑动连接。
10.当需要提升无人机时,依次控制无人机存储箱上的弹簧卡扣打开关闭,使得载板依次落至在传送带上,同时启动升降电机,使得升降电机轴转动,带动半齿锥齿轮转动,使得锥齿轮间歇性转动,从而带动滚珠丝杆间歇性转动,使得滑块螺母在滚珠丝杆上转动提升一段后停滞,使得升降板与传送带处于同一水平面,此时启动传送带轮,使得传送带移动,带动载板移动,同时启动拨杆箱内部的旋转电机,使得推杆固定块转动带动大电动推杆转动,使得拨杆转动至壳体内部,停止旋转电机转动,接着启动大电动推杆使得拨杆在壳体上的滑槽内移动,从而推动无人机落至升降板,同时滚珠丝杆继续间歇性转动,使得滑块螺母转动,带动升降板转动,使得载板失去支点落至载板收集腔内,无人机提升装置能够实现对无人机平稳且精确的提升功能,配合半齿锥齿轮能够实现间歇性传动。
11.当需要发射无人机时,滚珠丝杆间歇转动使得滑块螺母移动至靠近壳体底部的滑动管下侧后,在滑动管内向上滑动,直至从升降腔内移动至起落腔内,启动小电动推杆,使得u型推块伸长,从而推动无人机离开升降板至起落台上端面,同时启动起落电机带动宽直齿轮旋转,使得齿环转动,带动锥形轮转动,使得圆锥滚子依次从与锥形轮短截面移动至长截面,使得l型滑块提升,带动起落台向上移动,使得无人机移动至发射平面,无人机提升装置与无人机起落装置配合能实现无人机依次有序的发射,有效的避免了发射事故的发生。
12.与现有技术相比,本无人机的群发射系统具有以下优点:
13.1.半齿锥齿轮能够实现控制整体提升装置的间歇性传动。
14.2.无人机提升装置能够实现对无人机平稳且精确的提升功能。
15.3.无人机提升装置与无人机起落装置配合能实现无人机依次有序的发射,有效的避免了发射事故的发生。
附图说明
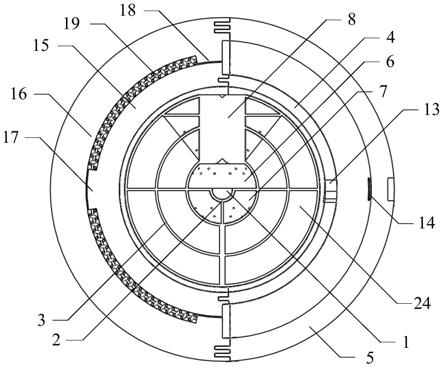
16.图1是无人机的群发射系统的结构示意图。
17.图2是图1中a处结构放大图。
18.图3是图1中b处结构放大图。
19.图4是图1中c
‑
c方向剖视图。
20.图5是图1中d处结构放大图。
21.图6是图1中e处三维视图。
22.图中,10、壳体;11、升降电机;12、升降电机轴;13、半齿锥齿轮;14、滚珠丝杆;15、锥齿轮;16、传送带;17、载板;18、传送带轮;19、拨杆箱;20、拨杆;21、弹簧卡扣;22、无人机;23、滑块螺母;24、滑动管固定板;25、起落台;26、宽直齿轮;27、齿环;28、滚子固定块;29、支撑轴;30、锥形轮;31、滚子轴;32、圆锥滚子;33、滑台;34、起落电机轴;35、起落电机;36、起落电机固定箱;37、起落腔;38、升降腔;39、载板收集腔;40、升降板停滞腔;41、小电动推杆;
42、u型推块;43、升降板;44、无人机存储箱;45、旋转电机;46、旋转电机轴;47、推杆固定块;48、大电动推杆;49、升降电机固定箱;50、l型滑块;51、滑动管。
具体实施方式
23.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
24.如图1所示,一种无人机的群发射系统,包括壳体10,壳体10内部左侧设有起落腔37,起落腔37内设有无人机起落装置,起落装置用于依次抬升无人机到起飞位置,壳体10右侧壁上设有无人机群存储装置,壳体10内部设有升降腔38,升降腔38内设有无人机提升装置,无人机提升装置用于依次升降无人机,壳体10底部设有载板收集腔39,载板收集腔39用于收集承载无人机的板块。
25.如图1和图2所示,无人机起落装置包括固定设置在壳体10内部左侧壁上的滑台33,滑台33下侧面上固定设有起落电机固定箱36,起落电机固定箱36内部固定设有起落电机35,起落电机35的输出端上设有起落电机轴34,起落电机轴34上固定设有宽直齿轮26,滑台33上滑动设有l型滑块50,l型滑块50上侧面上固定设有起落台25,l型滑块50与滑台33上分别固定设有滚子固定块28,每对滚子固定块28之间转动设有滚子轴31,每个滚子轴31上固定设有圆锥滚子32,滑台33上固定设有支撑轴29,支撑轴29上转动设有锥形轮30,锥形轮30上固定设有齿环27,齿环27与宽直齿轮26滑动且啮合,圆锥滚子32与锥形轮30啮合。
26.如图1、图5和图6所示,无人机提升装置包括固定在壳体10内部底面上的升降电机固定箱49,升降电机固定箱49内部固定设有升降电机11,升降电机11的输出端上设有升降电机轴12,升降电机轴12上固定设有半齿锥齿轮13,壳体10与升降电机固定箱49上转动设有滚珠丝杆14,滚珠丝杆14上固定设有锥齿轮15,锥齿轮15与半齿锥齿轮13啮合。
27.如图1和图3所示,滚珠丝杆14上转动设有多个滑块螺母23,滑块螺母23上固定设有升降板43,升降腔38的上侧壁与壳体10内部上侧壁上分别固定设有滑动管固定板24,每个滑动管固定板24上固定设有滑动管51,滑块螺母23与滑块螺母23滑动连接,壳体10内部右侧壁上固定设有小电动推杆41,小电动推杆41前端固定设有u型推块42。
28.如图1所示,无人机群存储装置包括固定设置在壳体10外部右侧壁上的无人机存储箱44,无人机存储箱44内部左右两侧壁上均匀设有弹簧卡扣21,无人机存储箱44内部均匀滑动设有载板17,每个载板17上设有无人机22。
29.如图1和图4所示,壳体10内部设有拨杆腔,拨杆腔上固定设有两个传送带轮18,两个传送带轮18之间连接有传送带16,壳体10后侧壁上固定设有拨杆箱19,拨杆箱19内部固定设有旋转电机45,旋转电机45的输出端上设有旋转电机轴46,旋转电机轴46上固定设有推杆固定块47,推杆固定块47上固定设有大电动推杆48,大电动推杆48与升降电机固定箱49转动连接,大电动推杆48上固定设有拨杆20,拨杆20与壳体10后侧壁上的滑槽滑动连接。
30.当需要提升无人机时,依次控制无人机存储箱44上的弹簧卡扣21打开关闭,使得载板17依次落至在传送带16上,同时启动升降电机11,使得升降电机轴12转动,带动半齿锥齿轮13转动,使得锥齿轮15间歇性转动,从而带动滚珠丝杆14间歇性转动,使得滑块螺母23在滚珠丝杆14上转动提升一段后停滞,使得升降板43与传送带16处于同一水平面,此时启动传送带轮18,使得传送带16移动,带动载板17移动,同时启动拨杆箱19内部的旋转电机
45,使得推杆固定块47转动带动大电动推杆48转动,使得拨杆20转动至壳体10内部,停止旋转电机45转动,接着启动大电动推杆48使得拨杆20在壳体10上的滑槽内移动,从而推动无人机22落至升降板43,同时滚珠丝杆14继续间歇性转动,使得滑块螺母23转动,带动升降板43转动,使得载板17失去支点落至载板收集腔39内,无人机提升装置能够实现对无人机平稳且精确的提升功能,配合半齿锥齿轮能够实现间歇性传动。
31.当需要发射无人机时,滚珠丝杆14间歇转动使得滑块螺母23移动至靠近壳体10底部的滑动管51下侧后,在滑动管51内向上滑动,直至从升降腔38内移动至起落腔37内,启动小电动推杆41,使得u型推块42伸长,从而推动无人机22离开升降板43至起落台25上端面,同时启动起落电机35带动宽直齿轮26旋转,使得齿环27转动,带动锥形轮30转动,使得圆锥滚子32依次从与锥形轮30短截面移动至长截面,使得l型滑块50提升,带动起落台25向上移动,使得无人机22移动至发射平面,无人机提升装置与无人机起落装置配合能实现无人机依次有序的发射,有效的避免了发射事故的发生。
32.以上所述仅为本发明的实施例,并非因此限制本发明的专利保护范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。