1.本发明涉及太阳能电池及光伏阵列的检测技术领域,特别是一种基于全局最大功率点跟踪和混合优化算法的光伏在线参数辨识方法。
背景技术:
2.为了应对日益严重的环境污染、气候恶化、化石能源枯竭等问题,太阳能作为一种可再生、可广泛获取的清洁能源受到了广泛的关注。光伏阵列作为光伏发电装置的核心,通常由光伏组件串并联组成。然而,光伏组件及阵列通常工作在复杂的室外环境中,在长期运行的角度看,光伏组件的性能不仅会随着使用年限的增加而下降,导致模型参数随着时间发生变化,而且会受到恶劣自然环境的影响而产生故障。因此,对光伏组件在离线实测条件下和并网发电条件下动态工作点的i
‑
v特性建模和参数辨识,对于发电系统整体的性能评估、实时光伏故障诊断具有重要的应用价值和实际意义。
3.光伏组件及阵列的等效模型主要分为单二极管五参数模型和双二极管七参数模型,准确快速地识别模型参数是光伏建模的关键。本文所提出的突变点检测方法,通过动态波形到静态i
‑
v特性的提取,实现并网在线的i
‑
v特性建模;所提出的参数提取方法可用于静态实测i
‑
v特性曲线和动态工作点提取的关键段i
‑
v特性曲线,能够提取相应的光伏阵列模型参数,结合逆变器并网mppt扫描过程,在线更新光伏阵列模型,进而有效的评估光伏电站的实际工作状况。
4.目前存在的光伏模型参数提取方法大体可分为三种类型,即解析法、数值优化法,以及两者的混合法。解析法主要通过构造光伏模型的显式方程,基于光伏组件制造商给定的或者实测的少数关键点数据(如开路电压、短路电流、最大功率点电压和电流、温度系数)求解出光伏模型参数。这类方法虽然简单、计算量较小,但是模型参数的精度较差,且易受这些关键点数据的精度和噪声影响。为了克服解析法的缺点,各种确定性和随机的数值优化方法相继被提出,这些方法通过最小仿真和实测i
‑
v曲线的均方根误差,来准确提取模型参数。确定性数值优化法包括newton
–
raphson法、模式搜索法等。这些方法虽然收敛速度快、计算量小,但易陷入局部最优值,模型参数的精度易受搜索起始点影响、比较不稳定。用于光伏模型参数提取的随机数值优化法主要有差分演化、遗传算法、蜂群算法、粒子群算法、花粉传播算法等等。这些算法具有较强的全局搜索能力,然而计算量较大、收敛速度较慢,难以适用于实时的参数提取。为了利用这类方法的优点同时克服其缺点,一些混合法被提出,包括布谷鸟结合单纯形法,解析法结合单纯形法,人工蜂群结合信赖域算法等。以上方存在一些问题,包括以下几个方面:首先在以往提出的算法中很少有移植到硬件平台中进行参数提取,而其中的主要原因是收敛速度并没有取得本质的提升,算法迭代次数过多导致算法复杂度高而无法在硬件平台上实现;其次,以往提出的算法只适用于静态完整的i
‑
v特性曲线,无法实现并网发电过程的参数在线提取。目前,公开发表的文献及专利中尚未见有基于突变点检测及混合量子粒子群算法和列文伯格——马夸尔特算法的光伏模型
在线参数辨识方法,该种突变点检测法也是在第一次应用在光伏并网逆变器gmppt扫描过程中提取关键段i
‑
v曲线,同时该混合优化算法也是首次在光伏模型参数提取中得到应用。
技术实现要素:
5.有鉴于此,本发明的目的是提供一种基于全局最大功率点跟踪和混合优化算法的光伏在线参数辨识方法,以克服现有相关技术的缺陷,从而实现并网在线参数提取并提高光伏模型参数辨识的性能。
6.本发明采用以下方案实现:一种基于全局最大功率点跟踪和混合优化算法的光伏在线参数辨识方法,包括以下步骤:
7.步骤s1:根据光伏逆变器动态工作点的时间序列电压电流波形,采用突变点检测算法辨别最大功率点跟踪步,记录波形突变时刻,提取处于稳态下的电压电流波形;
8.步骤s2:根据电压电流波形中的电压步长变化特点,识别全局最大功率点跟踪过程即gmppt的波形,并提取gmppt对应波形的关键段i
‑
v特性曲线;
9.步骤s3:根据全局最大功率点跟踪提取得到的i
‑
v特性曲线以及光伏阵列的串联和并联太阳能电池片的数量n
s
和n
p
,选择单二极管五参数模型进行参数辨识,并根据模型电气参数的搜索范围提取模型中的光电流、单二极管反向饱和电流、理想因子、等效串联电阻、等效并联电阻五个电气参数;
10.步骤s4:采用量子粒子群智能优化算法对光伏模型参数进行全局搜索,并获取最优的光伏模型参数初始值向量;
11.步骤s5:采用列文伯格—马夸尔特算法,并利用步骤s4中得到的最优光伏模型参数向量作为初始搜索参数,进行进一步的局部搜索;
12.步骤s6:通过混合量子粒子群算法和列文伯格——马夸尔特算法即qpso
‑
lm 算法对两类光伏数据进行等效单二极管模型参数提取;所述两类光伏数据为不同实测条件下静态完整的i
‑
v特性曲线和动态工作点全局最大功率点跟踪过程提取的关键段i
‑
v曲线。
13.进一步地,步骤s1中所述突变点检测算法根据动态工作点数据的采集频率,将每连续的200个光伏阵列工作电压作为一个集合,随机选择一个点将该集合分为两部分,计算两边各点与各部分平均值的残差,当总残差达到最小值,即可找到突变点,突变点检测算法如下式所示:
14.当j取得最小值,记录v
r=k
时间节点,即为动态工作点电压电流波形突变点时刻。
15.进一步地,步骤s2中所述全局最大功率点跟踪过程,为逆变器工作采用的扰动观察法,扰动的电压步长取值范围为0.2v至4v。逆变器最低工作电压80v至光伏阵列正常工作电压120v之间按电压步长4v扰动光伏阵列的输出电压,实现 gmppt过程,根据突变点时刻记录对应电压电流,提取gmppt过程关键段i
‑
v 曲线。
16.进一步地,所述步骤s3中所述光伏模型为单二极管五参数模型;单二极管光伏模组的数学模型如下式所示:
17.单二极管光伏阵列的数学模型如下所示:
[0018][0019]
其中,i
t
和v
t
为实测i
‑
v曲线中的电流和电压值;k为玻尔兹曼常数 1.3806503
×
10
‑
23
j/k,q为基本电荷量1.60217646
×
10
‑
19
c;单二极管光伏模型五参数向量为[i
ph
,i
s
,n,r
s
,r
p
],其中i
ph
为光电流,i
s
为单二极管反向饱和电流,n为单二极管理想化因子,r
s
等效串联电阻,r
p
为等效并联电阻,n
s
和n
p
分别是串联和并联的电池片的数量。
[0020]
进一步地,步骤s4和s5中算法通过在给定参数向量的搜索范围内,寻找一组最优的参数向量x使得如下述公式所示:
[0021][0022][0023]
将和方差sse作为混合优化算法(qpso
‑
lm)的目标函数,当其取值最小,即使得实测i
‑
v曲线与计算仿真i
‑
v曲线最优拟合,即表示实测i
‑
v曲线与计算仿真i
‑
v曲线最优拟合。
[0024]
进一步地,混合算法(qpso
‑
lm)通过在给定的参数向量的范围内,对于基准数据,其单二极管电池模型的参数向量范围:i
ph
∈[0,1],i
s
∈[0,1],n∈[1,2],r
s
∈[0,0.5],r
p
∈[0,100];单二极管光伏组件:i
ph
∈[0,2],i
s
∈[0,50],n∈[1,50],r
s
∈[0,2],r
p
∈[0,2000]。
[0025]
进一步地,步骤s4具体包括以下步骤:
[0026]
步骤s41:根据是搜索空间的d维参数向量,d为待优化参数的个数,lb
j
,ub
j
分别为参数的上下界;
[0027]
步骤s42:设置粒子的种群数n
p
和最大迭代次数itermax,计算粒子群中各个粒子的适应度值,适应度值计算公式即为目标函数,即计算和方差sse的值;
[0028]
步骤s43:初始化粒子迭代次数iter为1,进入迭代搜索过程;
[0029]
步骤s44:计算粒子历史最好位置平均值m
best
,其计算公式为:
[0030][0031]
m为种群大小,p
best_i
表示当前迭代的第i个粒子的极值;
[0032]
步骤s45:根据粒子位置更新公式:
[0033][0034]
计算当前粒子在搜索空间的最优解;
[0035]
步骤s46:计算种群和个体的适应度值,判断迭代次数iter是否小于等于算法设定的最大迭代次数itermax,若是,将当前迭代次数iter加1并重新进入步骤s44;否则对最后一次迭代计算得到的适应度值进行排序,并输出最优初始解向量x0。
[0036]
进一步地,所述步骤s5具体包括以下步骤:
[0037]
步骤s51:根据步骤s4获得的最优初始解向量x0,计算目标函数sse并记作 f(x),
记向量f(x)为在解向量x处的实测值与计算值之差,计算f(x)的jacobian矩阵j(x);
[0038]
步骤s52:设置迭代参数iter=0,最大目标函数计算值maxfunevals,最大迭代数maxiter;最优最优性容差值tol;
[0039]
步骤s53:计算f(x)的梯度向量g(x),g(x)的计算公式如下:g(x)=2j(x)
t
f(x);计算f(x)的hessian矩阵h(x),h(x)的计算公式如下:h(x)=2j(x)
t
j(x) 2q(x);其中,d
i
(x)为每个f
i
(x)的hessian矩阵;
[0040]
步骤s54:算法执行迭代,根据等式:(j(x
k
)
t
j(x
k
) λ
k
i)d
k
=
‑
j(x
k
)
t
f(x
k
),计算搜索方向d
k
,该方向即为线性最小二乘问题的解;
[0041]
步骤s55:边界检测,判断迭代点x是否处于约束边界内,如果迭代点位于边界之外,算法将该步投影到最近的可行点,算法将迭代点x修改为p(x),p(x)的更新方法为:p(x)=lb if x<lb;p(x)=ub if x>ub;p(x)=x otherwise;
[0042]
步骤s56:计算目标函数sse即f(x)是否满足算法终止条件1:或者终止条件2:iter>maxiter,如果否,iter继续加1并进入步骤s54迭代计算,直至达到终止条件,输出最终结果。
[0043]
与现有技术相比,本发明具有以下有益效果:
[0044]
本发明通过识别动态工作点时序电压电流波形的突变时刻,提取逆变器 gmppt扫描过程中的关键段i
‑
v特性曲线;混合量子粒子群优化算法的光伏模型在线参数辨识方法,通过标准数据集和实测数据集在静态条件下完整的i
‑
v特性曲线和动态工作点gmppt过程中提取的关键段i
‑
v特性曲线进行验证,通过采用量子粒子群算法(qpso)对最优的初始点进行选取,从而避免了基于列文伯格——马夸尔特算法(lm)受到初始点选取的影响而导致的收敛慢的问题。综上所述,与现有的光伏模型参数辨识算法相比,本发明实现光伏并网在线建模并大大提高了光伏模型参数提取的速度、精度、可靠性、收敛性和稳定性。
附图说明
[0045]
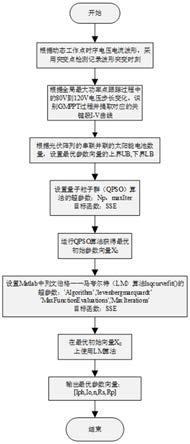
图1为本发明实施例的光伏模型在线参数辨识方法的总体流程图。
[0046]
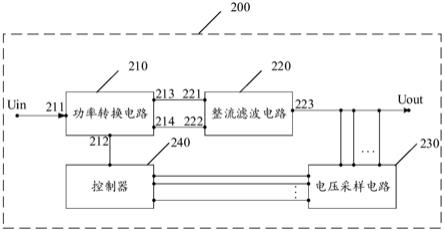
图2为本发明实施例的单二极管模型中光伏模组和光伏阵列或组串的等效电路图,其中,图2(a)为单二极管模组等效模型图,图2(b)为单二极管阵列或组串等效模型。
[0047]
图3为本发明实施例的光伏阵列及动态工作点电压电流采集系统和逆变器的示意图,其中,图3(a)为3*6光伏阵列图,图3(b)为数据采集系统实物图,图3 (c)为光伏逆变器实物图。
[0048]
图4为本发明实施例的逆变器动态工作点gmppt过程中电压电流波形的突变点检测图,其中,图4(a)为辐照度582w/m2工况下的突变点检测示意图,图4(b) 为辐照度748w/m2工况下的突变点检测示意图。图5为本发明实施例的基于突变点检测从gmppt扫描过程提取的关键段i
‑
v曲线和拟合图,其中,图5(a)为不同辐照度下gmppt过程提取的关键段i
‑
v曲线图,图5(b)为关键段i
‑
v曲线拟合图。图6为本发明实施例的和现有算法基于基准数据的单二极管模型下参数提取结果收敛速度的比较图,其中,图6(a)为不同算法在rtc.france数据集上的收敛速度比较图,图6(b)为不同算法在photowatt
‑
pwp201数据集上的收敛速度比较图。图7为本发明实施例的用单二极管模型对实测光伏阵列在不同条件下的参数提取结
果图,其中,图7(a)为实测光伏阵列的参数提取即i
‑
v特性曲线拟合图,图7(b)为实测光伏阵列的p
‑
v曲线拟合图。
具体实施方式
[0049]
下面结合附图及实施例对本发明做进一步说明。
[0050]
应该指出,以下详细说明都是例示性的,旨在对本技术提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本技术所属技术领域的普通技术人员通常理解的相同含义。
[0051]
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和 /或它们的组合。
[0052]
本实施例提供一种基于全局最大功率点跟踪和混合优化算法的光伏在线参数辨识方法,包括以下步骤:
[0053]
步骤s1:根据光伏逆变器动态工作点的时间序列电压电流波形,采用突变点检测算法辨别最大功率点跟踪步,记录波形突变时刻,提取处于稳态下的电压电流波形;
[0054]
步骤s2:根据电压电流波形中的电压步长变化特点,识别全局最大功率点跟踪过程即gmppt的波形,并提取gmppt对应波形的关键段i
‑
v特性曲线;
[0055]
步骤s3:根据全局最大功率点跟踪提取得到的i
‑
v特性曲线以及光伏阵列的串联和并联太阳能电池片的数量n
s
和n
p
;选择单二极管五参数模型进行参数辨识,并根据模型电气参数的搜索范围提取模型中的光电流、单二极管反向饱和电流、理想因子、等效串联电阻、等效并联电阻五个电气参数;
[0056]
步骤s4:采用量子粒子群智能优化算法对光伏模型参数进行全局搜索,并获取最优的光伏模型参数初始值向量;
[0057]
步骤s5:采用列文伯格—马夸尔特算法,并利用步骤s4中得到的最优光伏模型参数向量作为初始搜索参数,进行进一步的局部搜索;
[0058]
步骤s6:通过混合量子粒子群算法和列文伯格——马夸尔特算法即qpso
‑
lm 算法对两类光伏数据进行等效单二极管模型参数提取;所述两类光伏数据为不同实测条件下静态完整的i
‑
v特性曲线和动态工作点全局最大功率点跟踪过程提取的关键段i
‑
v曲线。
[0059]
在本实施例中,步骤s1中所述突变点检测算法根据动态工作点数据的采集频率,将每连续的200个光伏阵列工作电压作为一个集合,随机选择一个点将该集合分为两部分,计算两边各点与各部分平均值的残差,当总残差达到最小值,
[0060]
即可找到突变点,突变点检测算法如下式所示:
[0061][0062]
当j取得最小值,记录v
r=k
时间节点,即为动态工作点电压电流波形突变点时刻。
[0063]
在本实施例中,步骤s2中所述全局最大功率点跟踪过程,为逆变器工作采用的扰动观察法,扰动电压的取值范围为0.2v至4v;逆变器最低工作电压80v至光伏阵列正常工作电压120v之间按电压步长4v扰动光伏阵列的输出电压,实现gmppt过程,根据突变点时刻记
录对应电压电流,提取gmppt过程关键段i
‑
v 曲线。
[0064]
在本实施例中,所述步骤s3中所述光伏模型为单二极管五参数模型;单二极管光伏模组的数学模型如下式所示:
[0065][0066]
单二极管光伏阵列的数学模型如下所示:
[0067][0068]
其中,i
t
和v
t
为实测i
‑
v曲线中的电流和电压值;k为玻尔兹曼常数 1.3806503
×
10
‑
23
j/k,q为基本电荷量1.60217646
×
10
‑
19
c;单二极管光伏模型五参数向量为[i
ph
,i
s
,n,r
s
,r
p
],其中i
ph
为光电流,i
s
为单二极管反向饱和电流,n为单二极管理想化因子,r
s
等效串联电阻,r
p
为等效并联电阻,n
s
和n
p
分别是串联和并联的电池片的数量。
[0069]
在本实施例中,步骤s4和s5中算法通过在给定参数向量的搜索范围内,寻找一组最优的参数向量x使得如下述公式所示:
[0070][0071][0072]
将平方和误差sse作为混合优化算法(qpso
‑
lm)的目标函数,当其取值最小,即使得实测i
‑
v曲线与计算仿真i
‑
v曲线最优拟合,即表示实测i
‑
v曲线与计算仿真i
‑
v曲线最优拟合。
[0073]
在本实施例中,混合算法(qpso
‑
lm)通过在给定的参数向量的范围内,对于基准数据,其单二极管电池模型的参数向量范围:i
ph
∈[0,1],i
s
∈[0,1],n∈[1,2], r
s
∈[0,0.5],r
p
∈[0,100];单二极管光伏组件:i
ph
∈[0,2],i
s
∈[0,50],n∈[1,50], r
s
∈[0,2],r
p
∈[0,2000]。
[0074]
在本实施例中,步骤s4具体包括以下步骤:
[0075]
步骤s41:根据
[0076]
是搜索空间的d维参数向量,d为待优化参数的个数,lb
j
,ub
j
分别为参数的上下界;
[0077]
步骤s42:设置粒子的种群数n
p
和最大迭代次数itermax,计算粒子群中各个粒子的适应度值,适应度值计算公式即为目标函数,即计算和方差sse的值;
[0078]
步骤s43:初始化粒子迭代次数iter为1,进入迭代搜索过程;
[0079]
步骤s44:计算粒子历史最好位置平均值m
best
,
[0080]
其计算公式为:
[0081]
m为种群大小,p
best_i
表示当前迭代的第i个粒子的极值;
[0082]
步骤s45:根据粒子位置更新公式:
[0083][0084]
计算当前粒子在搜索空间的最优解;
[0085]
步骤s46:计算种群和个体的适应度值,判断迭代次数iter是否小于等于算法设定的最大迭代次数itermax,若是,将当前迭代次数iter加1并重新进入步骤s44;否则对最后一次迭代计算得到的适应度值进行排序,并输出最优初始解向量x0。
[0086]
在本实施例中,所述步骤s5具体包括以下步骤:
[0087]
步骤s51:根据步骤s4获得的最优初始解向量x0,计算目标函数sse并记作 f(x),记向量f(x)为在解向量x处的实测值与计算值之差,计算f(x)的jacobian矩阵j(x);
[0088]
步骤s52:设置迭代参数iter=0,最大目标函数计算值maxfunevals,最大迭代数maxiter;最优最优性容差值tol;
[0089]
步骤s53:计算f(x)的梯度向量g(x),g(x)的计算公式如下:g(x)=2j(x)
t
f(x);计算f(x)的hessian矩阵h(x),h(x)的计算公式如下:h(x)=2j(x)
t
j(x) 2q(x);其中,d
i
(x)为每个f
i
(x)的hessian矩阵;
[0090]
步骤s54:算法执行迭代,根据等式:(j(x
k
)
t
j(x
k
) λ
k
i)d
k
=
‑
j(x
k
)
t
f(x
k
),计算搜索方向d
k
,该方向即为线性最小二乘问题的解;
[0091]
步骤s55:边界检测,判断迭代点x是否处于约束边界内,如果迭代点位于边界之外,算法将该步投影到最近的可行点,算法将迭代点x修改为p(x),p(x)的更新方法为:p(x)=lb if x<lb;p(x)=ub if x>ub;p(x)=xotherwise;
[0092]
步骤s56:计算目标函数sse即f(x)是否满足算法终止条件1:或者终止条件2:iter>maxiter,如果否,iter继续加1并进入步骤s54迭代计算,直至达到终止条件,输出最终结果。
[0093]
如图3至7所示,较佳的,本实施例提出一种突变点检测算法用于动态工作点全局最大功率点跟踪过程的波形突变时刻检测,并将gmppt对应的波形转换成静态关键段i
‑
v特性曲线,并提出一种新的混合法即基于量子粒子群算法和列文伯格——马夸尔特算法的光伏模型在线参数辨识方法,该方法实现逆变器并网发电过程中gmppt扫描的识别并提取关键段i
‑
v特性曲线,结合量子粒子群算法强大的全局搜索能力和列文伯格——马夸尔特算法强大的局部搜索能力,进一步提高了光伏模型参数辨识的速度、精度、稳定性、可靠性和收敛性。
[0094]
基于全局最大功率点跟踪和混合优化算法(qpso
‑
lm)的光伏在线参数辨识方法,其包括以下步骤:步骤s1:根据光伏逆变器动态工作点的时间序列电压电流波形,采用突变点检测算法辨别最大功率点跟踪步,记录波形突变时刻,提取处于稳态下的电压电流波形;步骤s2:根据电压电流波形中的电压步长变化特点,识别全局最大功率点跟踪过程(gmppt)的波形,并提取gmppt对应波形的关键段i
‑
v特性曲线;步骤s3:根据全局最大功率点跟踪提取得到的i
‑
v特性曲线以及光伏阵列的串联和并联太阳能电池片的数量n
s
和n
p
,选择合适的光伏等效模型以及模型电气参数的搜索范围;步骤s4:采用量子粒子群智能优化算法对光伏模型参数的进行全局搜索,并获取最优的光伏模型参数初始值向量;步骤s5:采用列文伯格—马夸尔特算法,并利用步骤s4中得到的最优光伏模型参数向量作为初始搜索参数,进
行进一步的局部搜索;步骤s6:通过该混合优化算法对两类光伏数据(不同实测条件下静态完整的i
‑
v特性曲线,动态工作点全局最大功率点跟踪过程提取的关键段i
‑
v曲线)进行单二极管模型参数提取.
[0095]
其具体流程框图如图1所示。图2为本实施例的光伏阵列组件或电池的单二极管等效电路模型,其中图2a为单二极管模组等效模型,图2b为单二极管阵列或组串等效模型。所述的突变点检测是指检测动态工作点gmppt扫描过程中电压突变的时刻;光伏模型是指单二极管五参数模型;所述的光伏模型参数是指光电流i
ph
,二极管反向饱和电流i
s
,二极管理想化因子n,等效串联电阻r
s
,和等效并联电阻r
p
。
[0096]
单二极管光伏模组的数学模型如下式所示:
[0097][0098]
单二极管光伏阵列或组串的数学模型如下所示:
[0099][0100]
其中i
t
和v
t
为实测i
‑
v曲线中的电流和电压值;k为玻尔兹曼常数(1.3806503
×
10
‑
23 j/k),q为基本电荷量(1.60217646
×
10
‑
19
c);单二极管光伏模型五参数向量为 [i
ph
,i
s
,n,r
s
,r
p
],其中i
ph
为光电流,i
s
为单二极管反向饱和电流,n为单二极管理想化因子,r
s
等效串联电阻,r
p
为等效并联电阻,n
s
和n
p
分别是串联和并联的电池片的数量。本实施例提出的算法通过在给定参数向量的搜索范围内,寻找一组最优的参数向量x使得如下述公式所示:
[0101][0102][0103]
本实施例将平方和误差(sse)作为混合优化算法的目标函数,当其取值最小,即使得实测i
‑
v曲线与计算仿真i
‑
v曲线最优拟合,即表示实测i
‑
v曲线与计算仿真i
‑
v曲线最优拟合。
[0104]
在所述步骤s1中,首先对动态工作点电压电流波形进行低通滤波,滤除50hz 工频干扰信号,然后根据动态工作点数据的采集频率,将每连续的200个光伏阵列工作电压作为一个集合,随机将选择一个点将该集合分为两部分,计算两边各点与各部分平均值的残差,当总残差为达到最小值,即可找到突变点,突变点检测算法如下式所示:当j取得最小值,记录v
r=k
时间节点,即为动态工作点电压电流波形突变点时刻;提取处于稳态下的电压电流波形;
[0105]
步骤s2:全局最大功率点扫描过程,为逆变器工作采用的扰动观察法,即逆变器最低工作电压80v至光伏阵列正常工作电压120v之间按电压步长扰动光伏阵列的输出电压实现的gmppt过程,根据突变点时刻记录对应的电压电流,提取 80v至120v关键段i
‑
v曲线;
[0106]
步骤s3:具体模型参数及算法超参数的范围设定如下,对于静态完整i
‑
v曲线的基准数据,单二极管电池模型:i
ph
∈[0,1],i
s
∈[0,1],n∈[1,2],
[0107]
r
s
∈[0,0.5],r
p
∈[0,100]。单二极管光伏组件:i
ph
∈[0,2],i
s
∈[0, 50],n∈[1,50],r
s
∈[0,2],r
p
∈[0,2000]。qpso算法的蜂群数量 n
p
=15,最大迭代次数maxiter=15,lm算法的最大目标函数计算值 maxfunevals=780,最大迭代数maxiter=200。对于静态完整实测i
‑
v曲线测试仪器型号为中国台湾泰仕的prova
‑
1011,对于实测动态工作点全局最大功率点跟踪过程中电压电流波形提取的关键段i
‑
v曲线测试仪器型号为固德威gw3000
‑
ns,实验数据所述的光伏模型参数搜索范围为,i
ph
:[05n
p
](a),i
s
:[01n
p
](μa), n:[1n
s
2n
s
],r
s
:[01n
s
/n
p
](ω),r
p
:[0n
s
*100](ω),其中n
s
为光伏模型(光伏阵列/组件串/组件)串联的太阳能电池片的个数,n
p
为光伏阵列/组件串/组件中并联的太阳能电池片的个数。
[0108]
步骤s4:采用量子粒子群优化算法对光伏模型参数的进行全局搜索,并获取最优的光伏模型参数初始值向量。
[0109]
步骤s41:根据是搜索空间的d维参数向量,d为待优化参数的个数,lb
j
,ub
j
分别为参数的上下界;
[0110]
步骤s42:设置粒子的种群数n
p
和最大迭代次数itermax,计算粒子群中各个粒子的适应度值;
[0111]
步骤s43:初始化粒子迭代次数iter为1,进入迭代搜索过程;
[0112]
步骤s44:计算粒子历史最好位置平均值m
best
,其计算公式为:
[0113]
m为种群大小,p
best_i
表示当前迭代的第i个粒子的极值;
[0114]
步骤s45:根据粒子位置更新公式:
[0115]
计算当前粒子在搜索空间的最优解;
[0116]
步骤s46:计算种群和个体的适应度值,判断迭代次数iter是否小于等于算法设定的最大迭代次数itermax,若是,将当前迭代次数iter加1并重新进入步骤s44;否则对最后一次迭代计算得到的适应度值进行排序,并输出最优初始解向量x0。
[0117]
步骤s5:采用列文伯格—马夸尔特算法,并利用步骤s4中得到的最优光伏模型参数向量作为初始搜索参数,进行进一步的局部搜索;
[0118]
步骤s51:根据步骤s4获得的最优初始解向量x0,计算目标函数sse并记作 f(x),记向量f(x)为在解向量x处的实测值与计算值之差,计算f(x)的jacobian矩阵j(x);
[0119]
步骤s52:设置迭代参数iter=0,最大目标函数计算值maxfunevals,最大迭代数maxiter;最优最优性容差值tol;
[0120]
步骤s53:计算f(x)的梯度向量g(x),g(x)的计算公式如下:g(x)=2j(x)
t
f(x);计算f(x)的hessian矩阵h(x),h(x)的计算公式如下:h(x)=2j(x)
t
j(x) 2q(x);其中,d
i
(x)为每个f
i
(x)的hessian矩阵;
[0121]
步骤s54:算法执行迭代,根据等式:(j(x
k
)
t
w(x
k
) λ
k
i)d
k
=
‑
j(x
k
)
t
f(x
k
),计算搜索方向d
k
,该方向即为线性最小二乘问题的解;
[0122]
步骤s55:边界检测,判断迭代点x是否处于约束边界内,如果迭代点位于边界之
外,算法将该步投影到最近的可行点,算法将迭代点x修改为p(x),p(x)的更新方法为:p(x)=lb if x<lb;p(x)=ub if x>ub;p(x)=x otherwise;
[0123]
步骤s56:计算目标函数sse即f(x)是否满足算法终止条件1:或者终止条件2:iter>maxiter,如果否,iter继续加1并进入步骤s54迭代计算,直至达到终止条件,输出最终结果。
[0124]
较佳的,本实例中对实测的光伏阵列在不同光照度和温度下的两类i
‑
v曲线 (不同实测条件下静态完整的i
‑
v特性曲线,动态工作点全局最大功率点跟踪过程中电压电流波形提取的关键段i
‑
v曲线)进行拟合以提取单二极管光伏模型参数,结果如表1
‑
2和图5、图7所示。由表1
‑
2中的曲线拟合均方根误差(rmse) 可见,本实施例所提出的方法能够进行精确的曲线拟合,充分体现了本实施例的准确性。
[0125]
表1.不同光照度和温度下静态完整i
‑
v曲线拟合及参数提取结果
[0126][0127]
表2.不同光照度和温度下动态工作点gmppt过程中关键段i
‑
v曲线拟合及参数提取结果
[0128][0129][0130]
表3本实施例和现有算法基于基准数据的单二极管模型下光伏模组参数提取结果的比较表
[0131]
pararneter extractioniphio(μa)nrsrprmse(explicit function)rmse(implicit function)proposed method0.76077550.323021.481180.03637753.718529.8602e
‑
047.7539e
‑
04gs
‑
inms0.76080.3231.48120.036353.71859.8602e
‑
047.7543e
‑
04de(three
‑
point)0.760720.319111.479860.0362954.192411.0733e
‑
038.1291e
‑
04cso0.760780.3231.481180.0363853.71859.8602e
‑
047.7544e
‑
04isce0.7607760.323021.481180.0363853.71859.8602e
‑
047.7543e
‑
04eha
‑
nms0.7607760.323021.481180.0363853.71859.8602e
‑
047.7543e
‑
04stlbo0.760780.323021.481140.0363853.71879.8602e
‑
047.8059e
‑
04rcr
‑
ijade0.7607760.323021.481180.0363853.71859.8602e
‑
047.7543e
‑
04abc
‑
trr0.7607760.323021.481180.0363853.71859.8602e
‑
047.7543e
‑
04nm
‑
mpso0.760780.323061.48120.0363853.72229.8602e
‑
047.7550e
‑
04tlabc0.760780.323021.481180.0363853.71649.8602e
‑
047.7542e
‑
04
lmsa0.76080.31851.47980.036453.32649.86e
‑
047.8079e
‑
04pce0.7607760.3230211.4810740.0363853.71859.8602e
‑
048.0947e
‑
04pso0.760770.324541.481650.0363653.8559.8606e
‑
047.7612e
‑
04bmo0.760770.324791.481730.0363653.87169.8608e
‑
047.7621e
‑
04mabc0.7607790.3213231.4813850.0363953.49.8610e
‑
041.7275e
‑
03abc0.76080.32511.48170.036453.64339.8620e
‑
048.3343e
‑
04gotlbo0.760780.3315521.483820.0362754.11549.8744e
‑
047.7988e
‑
04gghs0.760920.32621.482170.0363153.06479.9097e
‑
047.8146e
‑
04abso0.76080.306231.475830.0365952.29039.9124e
‑
047.7368e
‑
04ighs0.760770.343511.48740.0361353.28459.9306e
‑
048.2116e
‑
04hs0.76070.3051.47540.036653.59469.95e
‑
047.7850e
‑
04cpso0.76070.41.50330.035459.0121.3900e
‑
031.0255e
‑
03
[0132]
以上所述仅为本发明的较佳实施例,凡依本发明申请专利范围所做的均等变化与修饰,皆应属本发明的涵盖范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。