1.本发明属于重型工程机械领域,更具体地,涉及一种自动行走的工程桩机以及自动行走方法。
背景技术:
2.重型工业中,打桩机是非常常见的工程机械,一般情况下,打桩机作用点的地面并不平整,由于作业环境的特殊性和恶劣性,打桩机在行驶的过程中会出现严重的左右摇晃现象,随时都有倾倒的危险,在桩机进行打桩时,经常出现由于地面不平整导致打桩倾斜的现象。
3.公开号为cn112627277a发明专利申请公开了一种挖掘机自动行走方法,该挖掘机具有自动行走系统,自动行走系统包括北斗导航系统、相机、距离传感器、速度传感器、转向传感器、处理器、控制器,控制器用于控制动臂油缸、斗杆油缸、铲斗油缸、左行走装置、右行走装置。北斗导航系统将挖掘机的实时位置发送到处理器,所述相机用于获取挖掘机周围的图像,将数据发送到处理器,所述距离传感器用于获取与周边物体的距离,将数据发送到处理器,所述速度传感器将挖掘机的速度采集发送到处理器,所述转向传感器将挖掘机的行走方向发送到处理器,所述处理器处理北斗导航系统、相机、距离传感器、速度传感器、转向传感器的数据。其能够较好的适应公路上的复杂路况。但是,其不能适用于桩机的自动行走,桩机的结构不同于带有轮子的挖掘机,具体体现在横向行走、纵向行走和旋转的过程中控制方式无法借鉴。
4.因此,为实现桩机的自动行走,需要为打桩机开发一种自动行走的工程桩机以及自动行走方法。
技术实现要素:
5.针对现有技术的缺陷,本发明的目的在于,提供一种自动行走的工程桩机以及自动行走方法,通过桩机座、支脚和多层基座层的设计,配合自动行走中需要考虑实际情况,实现了桩机的自动、安全行走。
6.为实现上述目的,本发明提供了一种能自动行走的工程桩机,其包括支脚,桩杆和桩机座,桩机座整体呈平板状,
7.桩机座具有至少三层相互层叠的基座层,从底部往上依次分别为第一基座层,第二基座层和第三基座层,在第一基层座内设置有横向液压油缸,第二基层座内设置有纵向液压油缸,桩杆设置在第三基座层上,第一基座层和第二基座层相连接以能在第一基座层移动时带动第二基座层移动,第二基座层和第三基座层相连接,以能在第二基座层相移动时候带动第三底座层移动,
8.桩杆设置在桩机座的第三底座层中央处,第三基座层的四角通过横梁杆垂直连接多根支脚,以受支脚支撑,支脚长度能调整,以能在支脚伸长时支撑整个桩机的重量,并在缩回时,由桩机座支撑整个桩机的重量。
9.进一步的,第一基座层的两端头处分别设置有相互平行的横向液压油缸,两端头的横向液压油缸的中位处为液压油缸待机状态位置,在横向液压油缸的液压杆伸出到极限值时,横向液压油缸行驶整个行程,在横向液压油缸的液压杆收缩回液压油缸缸体内部时,横向液压油缸行驶整个行程,横向液压油缸的行程为整个横向液压油缸缸体最大可设计行程的一半。
10.进一步的,第二基层座内设置的纵向液压油缸与相互平行的横向液压油缸相垂直,并且位于两个横向液压油缸之间,纵向液压油缸中位处为液压油缸待机状态位置,纵向液压油缸的行程为整个纵向液压油缸缸体最大可设计行程的一半。
11.进一步的,桩杆上设置有超声波发射器和超声波接受器。
12.进一步的,横向液压油缸的液压杆通过滑块和滑轨的连接方式连接第二基座层,纵向液压油缸通过滑块和滑轨的方式连接第三基座层。
13.按照本发明的又一个方面,还提供一种如上所述的能自动行走的工程桩机进行自动行走的方法,其包括横移、纵向行走和转体,
14.进行桩机横移时,第三基座层四角的支脚伸长并触地,以架起整个工程桩机,两端头的横向液压油缸的液压杆同时伸出或者液压缸缸体同时收回,横向液压油缸伸长或者缩短的方向发生在同一侧,通过滑动方式实现第一基座层按照设定方向移动,第二基座层和第三底座层静止,待第一基座层移动到预定的行程位置,第三基座层四角的支脚收缩,第一基座层触地并支撑桩机重量,横向液压油缸的液压杆收回或者液压缸缸体伸出至预定的行程位置,在此过程中通过滑动方式带动第二基座层移动,完成横向行走,
15.进行纵向行走时候,第三基座层四角的支脚伸长并触地,以架起整个工程桩机,纵向液压油缸的液压杆伸出,通过滑动方式实现第一基座层和第二基座层按照设定方向移动,第三底座层静止,待第一、第二基座层移动到预定的行程位置,第三基座层四角的支脚收缩,第一基座层触地并支撑桩机重量,纵向液压油缸的液压缸缸体收回到指定的行程位置,在此过程中通过滑动方式带动第三基座层移动,完成纵向行走。
16.进一步的,进行桩机转体时,第三基座层四角的支脚伸长并触地,以架起整个工程桩机,两端头的横向液压油缸的液压杆同时伸出或者液压缸缸体同时收回,横向液压油缸伸长或者缩短的方向发生在相对的两侧,通过滑动发生在相对的两个方向上而造成的转动实现第一基座层按照设定方向转动,第二基座层和第三底座层静止,待第一基座层移动到预定的行程位置,第三基座层四角的支脚收缩,第一基座层触地并支撑桩机重量,横向液压油缸的液压杆收回或者液压缸缸体伸出至预定的行程位置,并且,横向液压油缸变短的方向发生在相对的两侧,通过滑动发生在相对的两个方向上而造成的转动实现第二、第三基座层按照设定方向转动,实现桩机转体。
17.进一步的,在桩机横移、纵向行驶或者转体过程中,适时检测底盘的倾斜角度,在桩机底盘的倾斜角度大于15
°
时,桩机自动停止行走,进行报警;在桩机底盘的倾斜角度位于5
°
至15
°
之间时,桩机执行转体,改变行走方向;在桩机底盘的倾斜角度小于5
°
时,桩机不做改变,继续行走。
18.进一步的,采用超声波发射器发射超声波,探测桩机行走方向正前方120
°
方向内坑洼,采用超声波接受器接受经地面反射回的超声波,如果在桩机行走方向正前方120
°
内且距离超声波发射器和超声波探测器2米内,具有表面积大于0.5
㎡
且深度大于0.5m的坑
洼,则桩机进行停机并报警,如果坑洼表面积大于0.5
㎡
但是深度小于0.5m,则继续行走,如果坑洼表面积小于0.5
㎡
但是深度大于0.5m,则继续行走,如果坑洼表面积小于0.5
㎡
且深度小于于0.5m,则继续行走。
19.通过本发明所构思的以上技术方案,与现有技术相比,能够取得下列有益效果:
20.本发明中,桩机座分为三层,分别为第一基座层,第二基座层和第三基座层,在第一基层座内设置有横向液压油缸,第二基层座内设置有纵向液压油缸,桩杆设置在第三基座层上,第一基座层和第二基座层相连接以能在第一基座层移动时带动第二基座层移动,第二基座层和第三基座层相连接,以能在第二基座层相移动时候带动第三底座层移动,第三基座层的四角受支脚支撑,支脚长度能调整,能在支脚伸长时支撑整个桩机的重量,并在缩回时,由桩机座支撑整个桩机的重量,以上的结构中,横向液压缸和纵向液压缸的分层设置,其设计巧妙合理,为桩机的自动行走提供了结构支撑和可能。进一步的,横向液压油缸和纵向液压油缸在中位的设计,也为自动自动和转体提供了实现条件。
21.进行桩机横移时,支脚伸长并触地,两端头的横向液压油缸的液压杆同时伸出或者液压缸缸体同时收回,实现第一基座层按照设定方向移动,支脚收缩后,第二基座层移动,完成横向行走,按照同样的方式可实现纵向横移,设置在两个端头的横向液压油缸伸长或者缩短的方向不一致时候,还能实现桩机转体。此外,通过检测桩机底盘的倾斜角度和桩机行走正前方的坑洼,保证了桩机行走过程中安全,以上的行走方法,考虑周到全面,避免了危险发生。
附图说明
22.图1是本发明实施例中桩体结构简图;
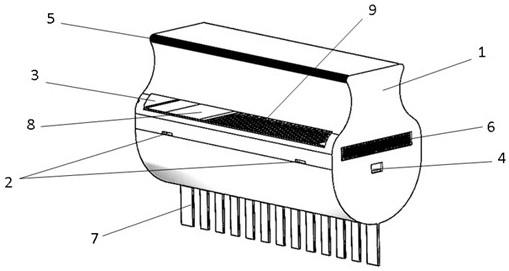
23.图2是本发明实施例中横向液压油缸和纵向液压油缸整体布置方位示意图;
24.图3是本发明实施例中桩机自动行走流程示意图;
25.图4是本发明实施例中桩机避免倾斜的示意图;
26.图5是本发明实施例中桩机避免坑洼的示意图。
具体实施方式
27.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
28.图1是本发明实施例中桩体结构简图,图2是本发明实施例中横向液压油缸和纵向液压油缸整体布置方位示意图,结合两图可知,本发明的能自动行走的工程桩机,其包括支脚s1,桩杆s3和桩机座s2,桩机座s2整体呈平板状,桩机座具有三层相互层叠的基座层,从底部往上依次分别为第一基座层,第二基座层和第三基座层。在第一基层座内设置有横向液压油缸,横向液压油缸具有两个,分别设置在长方形的桩机座的两个短边的一侧。纵向液压油缸设置在第二基座层,并且两个相互平行的横向液压油缸垂直,位于两个横向液压油缸之间,桩杆设置在第三基座层上。第三基座层的四角通过横梁杆垂直连接多根支脚s,支脚s1长度能调整,以能在支脚伸长时支撑整个桩机的重量,并在缩回时,由桩机座支撑整个桩机的重量。
29.第一基座层与第二基座层之间以滑块和滑轨的连接方式连接,具体的连接关系为:第一基座层与第二基座层之间连接为内嵌式燕尾槽结构,第一基座层的接触面为燕尾凹槽,第二基座层的接触面为燕尾凸台,横向液压油缸s4的液压杆端固定在第一基座层上,横向液压油缸的缸尾部设置有缸尾座,缸尾座固定在第二基座层上。第二基座层和第三基座层之间也以滑块和滑轨的连接方式相连,具体的连接关系为:第二基座层与第三基座层之间连接为内嵌式燕尾槽结构,第二基座层的接触面为燕尾凹槽,第三基座层的接触面为燕尾凸台,燕尾凸台嵌装于燕尾凹槽内,纵向液压油缸s5的液压杆端固定第二基座层上,纵向液压油缸的缸尾座固定于第三基座层上。
30.本发明中,横向液压油缸的中位处为液压油缸待机状态位置,在横向液压油缸的液压杆伸出到极限值时,横向液压油缸行驶整个行程,在横向液压油缸的液压杆收缩回液压油缸缸体内部时,横向液压油缸行驶整个行程,横向液压油缸的行程为整个横向液压油缸缸体最大可设计行程的一半。纵向液压油缸中位处为液压油缸待机状态位置,纵向液压油缸的行程为整个纵向液压油缸缸体最大可设计行程的一半。这样设计的巧妙之处为:设备处于基准状态时,液压缸处于中位,即液压缸伸出行程一半,无论是向前移动还是向后移动都可以充分利用液压缸行程和第一时间响应动作指令,保证设备移动机构能正常运转。
31.本发明中,工程桩机进行自动行走的方法,其包括横移、纵向行走和转体,具体的,(1)进行桩机横移时,第三基座层四角的支脚伸长并触地,以架起整个工程桩机,两端头的横向液压油缸的液压杆同时伸出或者液压缸缸体同时收回,横向液压油缸伸长或者缩短的方向发生在同一侧,通过滑动方式实现第一基座层按照设定方向移动,第二基座层和第三底座层静止,待第一基座层移动到预定的行程位置,第三基座层四角的支脚收缩,第一基座层触地并支撑桩机重量,横向液压油缸的液压杆收回或者液压缸缸体伸出至预定的行程位置,在此过程中通过滑动方式带动第二基座层移动,完成横向行走。(2)进行纵向行走时候,第三基座层四角的支脚伸长并触地,以架起整个工程桩机,纵向液压油缸的液压杆伸出,通过滑动方式实现第一基座层和第二基座层按照设定方向移动,第三底座层静止,待第一、第二基座层移动到预定的行程位置,第三基座层四角的支脚收缩,第一基座层触地并支撑桩机重量,纵向液压油缸的液压缸缸体收回到指定的行程位置,在此过程中通过滑动方式带动第三基座层移动,完成纵向行走。(3)进行桩机转体时,第三基座层四角的支脚伸长并触地,以架起整个工程桩机,两端头的横向液压油缸的液压杆同时伸出或者液压缸缸体同时收回,横向液压油缸伸长或者缩短的方向发生在相对的两侧,通过滑动发生在相对的两个方向上而造成的转动实现第一基座层按照设定方向转动,第二基座层和第三底座层静止,待第一基座层移动到预定的行程位置,第三基座层四角的支脚收缩,第一基座层触地并支撑桩机重量,横向液压油缸的液压杆收回或者液压缸缸体伸出至预定的行程位置,并且,横向液压油缸变短的方向发生在相对的两侧,通过滑动发生在相对的两个方向上而造成的转动实现第二、第三基座层按照设定方向转动,实现桩机转体。
32.图3是本发明实施例中桩机自动行走流程示意图,由图可知,更具体的行走流程为:系统下发桩位坐标,桩机通过比如gps定位系统判断桩机和桩位坐标距离,从而控制桩机横移和纵移到达目标桩位,桩机在自动行走时gps信号和倾角转感器实时监控状态值。若x方向为桩机横向坐标,y方向为纵向坐标,假设系统下发桩位坐标位(x1,y1),桩机所在坐标位(x2,y2),则桩机与目标桩位的偏差值为(x1
‑
x2,y1
‑
y2),将偏差值转换为实际偏差距
离横向为a,纵向为b(a,b的值随着桩机的移动而变化)。若桩机横移缸行程为20cm,纵移缸行程为20cm,油缸位移传感器检测距离与油缸行程匹配,若a>20cm,则横移缸执行一次完整的横移动作,桩机机架顶起
→
横向液压缸伸出或收回到位推动最下层滑轨运动
→
四个支撑液压缸缩回
→
横向液压缸收回或伸出到位
→
推动上层滑轨动作
→
横向行走完成,若a<20cm,则横移缸执行指定距离横移动作,桩机机架顶起
→
横向液压缸伸出或收回距离a推动最下层滑轨运动
→
四个支撑液压缸缩回
→
横向液压缸收回或伸出到位
→
推动上层滑轨动作
→
横向行走完成,纵移与横移同理。考虑到地面平整度对桩机行走会产生误差,桩位(横纵向)允许偏差5cm,桩间距允许偏差10cm,若桩机与目标桩位的偏差值横向a<5cm,纵向偏差b<5cm,则认为桩机已到达指定桩位。
33.图4是本发明实施例中桩机避免倾斜的示意图,由图可知,在桩机横移、纵向行驶或者转体过程中,适时检测底盘的倾斜角度,在桩机底盘的倾斜角度大于15
°
时,桩机自动停止行走,进行报警;在桩机底盘的倾斜角度位于5
°
至15
°
之间时,桩机执行转体,改变行走方向;在桩机底盘的倾斜角度小于5
°
时,桩机不做改变,继续行走。
34.图5是本发明实施例中桩机避免坑洼的示意图,由图可知,采用超声波发射器发射超声波,探测桩机行走方向正前方120
°
方向内坑洼,采用超声波接受器接受经地面反射回的超声波,如果在桩机行走方向正前方120
°
内且距离超声波发射器和超声波探测器2米内,具有表面积大于0.5
㎡
且深度大于0.5m的坑洼,则桩机进行停机并报警,如果坑洼表面积大于0.5
㎡
但是深度小于0.5m,则继续行走,如果坑洼表面积小于0.5
㎡
但是深度大于0.5m,则继续行走,如果坑洼表面积小于0.5
㎡
且深度小于于0.5m,则继续行走。
35.本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。