一种基于变增益单神经元pid的秸秆旋埋还田导航系统
技术领域
1.本发明属于导航系统技术领域,具体涉及一种基于变增益单神经元pid的秸秆旋埋还田导航系统。
背景技术:
2.秸秆还田是当今世界上普遍重视的一项培肥地力的增产措施,在杜绝了秸秆焚烧所造成的大气污染的同时还有增肥增产作用,秸秆还田能增加土壤有机质,改良土壤结构,使土壤疏松,孔隙度增加,容量减轻,促进微生物活力和作物根系的发育。秸秆还田增肥增产作用显著,一般可增产5%~10%,但若方法不当,也会导致土壤病菌增加,作物病害加重及缺苗(僵苗)等不良现象。因此采取合理的秸秆还田措施,才能起到良好的还田效果。
3.目前水稻田土壤松软,收割机作业后会出现残留秸秆凸起、地表坑洼等现象,导致秸秆旋埋还田作业易出现重耕、漏耕和自动驾驶路径跟踪精度差等问题。自动转向系统是实现农机自动导航的前提,转向控制精度对路径跟踪精度影响较大,目前秸秆旋埋还田作业以驾驶员操作拖拉机悬挂旋耕机为主要作业方式,作业过程中驾驶员凭感觉判断机具位置,存在重耕、漏耕现象。因此,实现秸秆旋埋还田作业的自动导航则是目前亟需解决的问题。
技术实现要素:
4.本发明要解决的技术问题是克服现有的缺陷,提供一种基于变增益单神经元pid的秸秆旋埋还田导航系统,以解决上述背景技术中提出的目前秸秆旋埋还田作业以驾驶员操作拖拉机悬挂旋耕机为主要作业方式,作业过程中驾驶员凭感觉判断机具位置,存在重耕、漏耕现象的问题。
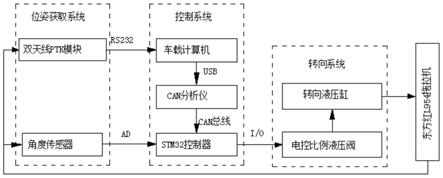
5.为实现上述目的,本发明提供如下技术方案:一种基于变增益单神经元pid的秸秆旋埋还田导航系统,包括位姿获取系统、控制系统和转向系统,所述位姿获取系统包括双天线ptk模块和角度传感器,所述控制系统包括车载计算机、can分析仪和stm32控制器,所述转向系统包括转向液压缸和电控比例液压阀。
6.优选的,所述双天线ptk模块的输出端通过rs232和车载计算机的输入端之间相互电性连接,所述角度传感器的输出端通过ad和stm32控制器的输入端之间相互电性连接。
7.优选的,所述车载计算机的输出端通过usb和can分析仪的输入端之间相互电性连接,所述can分析仪的输出端通过can总线和stm32控制器之间相互电性连接。
8.优选的,所述stm32控制器的输出端通过i/o和电控比例液压阀的输入端之间相互电性连接,所述电控比例液压阀的输出端和转向液压缸之间相互电性连接。
9.优选的,所述转向液压缸的输出端和东方红l954拖拉机的输入端之间相互电性连接,东方红l954的输出端分别和双天线ptk模块、角度传感器的输入端之间相互电性连接。
10.优选的,包括以下步骤:
11.步骤一:检查作业机具状态,确保电控系统正常工作,将上述导航系统安装至东方
红l954拖拉机内部的车载计算机(201)处,东方红l954拖拉机内的变频器采用v/f的控制方式,其输出电压u与频率给定信号成正比,可以将其等效成为一个一阶惯性环节,具体公式如下:
12.g
inv
(s)=k
inv
/(ts 1)
13.式中,k
inv
为变频器的放大倍率,t为变频器的加速时间;
14.步骤二:在忽略电动机的励磁电流和旋转电动势的动态影响,并认为磁通在动态过程中保持不变的前提下,三相异步电动机的传递函数可以近似等效成为一个一阶惯性环节,其公式如下:
15.g
20
(s)=k
20
/(t
20
s 1)
16.式中,k
20
为电动机的放大倍数,t
20
为电动机的惯性时间常数;
17.步骤三:增益自调整单神经元pid控制器中状态转换器的输入为e(k)=r(k)
‑
y(k),状态转换器的输出为控制器所需要的状态量x1(k)、x2(k)和x3(k),具体公式如下:
18.x1(k)=r(k)
‑
y(k)
19.x2(k)=e(k)
‑
e(k
‑
1)
20.x3(k)=e(k)
‑
2e(k
‑
1) e(k
‑
2);
21.步骤四:对作业机的各项数据进行检测并记录,作业机速度为1.15m/s左右时,变增益单神经元pid控制器直线跟踪的最大横向偏差不超过0.071m,平均绝对偏差不超过0.031m,标准差不超过0.038m,变增益单神经元pid控制器曲线跟踪的最大横向偏差不超过1.121m,平均绝对偏差不超过1.030m,标准差不超过0.525m。
22.优选的,所述步骤三中,对于单神经元pid控制器,增益系数k是最敏感的参数,在一般的控制器中,k的值只是在初始时设定,不具备在线学习的能力,因此在一定程度上限制了该控制器的功能,增益自调整单神经元控制器中系数k具备在线学习功能,这样可以大大提高系统的控制品质以及鲁棒性。
23.优选的,所述步骤三中,该控制器中,选取改进型hebb算法,则神经元的输出为w1(k)=w1(k
‑
1) n
i
e(k)u(k
‑
1)[2e(k)
‑
e(k
‑
1)],式中:w1(k)和n
i
(i=1,2,3)分别为神经元pid在k时刻所对应的权值和学习速率,当signe(k)=signe(k
‑
1)时,k(k)=k(k
‑
1) ck(k
‑
1)/t(k
‑
1),当signe(k)≠signe(k
‑
1),k(k)=0.7k(k
‑
1)。
[0024]
优选的,所述步骤三中,当signe(k)=signe(k
‑
1)或signe(k)≠signe(k
‑
1)时,k的大小决定了输出的变化率,k的初始值可任意设定,一般选取k>0即可。
[0025]
优选的,所述步骤三的式中,t可表示为t(k)=t(k
‑
1) lsign(丨
△
e(k)丨
‑
t(k
‑
1)
△
e2(k)),其初始值一般选取较小的正数,c和l的值可以在一定的范围内选取,但都不宜过大,以免使得系统不稳定,在引入了增益自调整后,单神经元pid算法的自学习、自组织能力以及鲁棒性均有明显的提高。
[0026]
与现有技术相比,本发明提供了一种基于变增益单神经元pid的秸秆旋埋还田导航系统,具备以下有益效果:
[0027]
1、本发明通过采用双天线rtk
‑
gnss获取拖拉机的实时位置和航向角信息,由变增益单神经元pid控制器根据理论转角和航向角偏差变化输出实际执行转角,实现旋埋作业自主路径跟踪,可以有效减轻农机操作人员的劳动强度,提高作业精度与作业效率,有效的避免了目前秸秆旋埋还田作业以驾驶员操作拖拉机悬挂旋耕机为主要作业方式,作业过程
中驾驶员凭感觉判断机具位置,存在重耕、漏耕现象的问题;
[0028]
2、本发明通过以东方红l954拖拉机为基础,将其机械转向机构改制为电控液压转向系统,以stm32单片机为控制器,基于pid控制算法实现快速精准转向控制,以双天线rtk
‑
gnss和角度传感器为作业状态采集装置,通过变增益单神经元pid算法控制作业机具进行跟踪路径,并与常规pid和单神经元pid算法进行对比,改善了单神经元调节比例系数k固定的局限,提高了控制器响应速度且降低了超调量,增强了导航系统对旋埋还田作业环境的自适应性;
[0029]
3、本发明通过设置的变增益单神经元pid自适应控制算法,相对常规pid和单神经元pid控制算法,降低了秸秆旋埋还田作业环境对跟踪精度的影响,增强了导航系统对作业环境的适应性和鲁棒性。当作业速度为1.15m/s时,直线跟踪的最大横向偏差不超过0.071m,平均绝对偏差不超过0.031m;曲线跟踪的最大横向偏差不超过1.121m,平均绝对偏差不超过1.030m。其作业效果相对于常规pid和单神经元pid控制算法有较大提升,有效提高了秸秆旋埋还田作业的路径跟踪精度,适用于未来无人驾驶下的秸秆旋埋还田作业。
附图说明
[0030]
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制,在附图中:
[0031]
图1为本发明提出的基于变增益单神经元pid的秸秆旋埋还田导航系统中导航控制系统的结构示意图。
具体实施方式
[0032]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0033]
请参阅图1,本发明提供一种技术方案:一种基于变增益单神经元pid的秸秆旋埋还田导航系统,包括位姿获取系统、控制系统和转向系统,位姿获取系统包括双天线ptk模块和角度传感器,控制系统包括车载计算机、can分析仪和stm32控制器,转向系统包括转向液压缸和电控比例液压阀,本发明通过采用双天线rtk
‑
gnss获取拖拉机的实时位置和航向角信息,由变增益单神经元pid控制器根据理论转角和航向角偏差变化输出实际执行转角,实现旋埋作业自主路径跟踪,可以有效减轻农机操作人员的劳动强度,提高作业精度与作业效率,有效的避免了目前秸秆旋埋还田作业以驾驶员操作拖拉机悬挂旋耕机为主要作业方式,作业过程中驾驶员凭感觉判断机具位置,存在重耕、漏耕现象的问题。
[0034]
本发明中,优选的,双天线ptk模块的输出端通过rs232和车载计算机的输入端之间相互电性连接,角度传感器的输出端通过ad和stm32控制器的输入端之间相互电性连接。
[0035]
本发明中,优选的,车载计算机的输出端通过usb和can分析仪的输入端之间相互电性连接,can分析仪的输出端通过can总线和stm32控制器之间相互电性连接。
[0036]
本发明中,优选的,stm32控制器的输出端通过i/o和电控比例液压阀的输入端之间相互电性连接,电控比例液压阀的输出端和转向液压缸之间相互电性连接。
[0037]
本发明中,优选的,转向液压缸的输出端和东方红l954拖拉机的输入端之间相互电性连接,东方红l954的输出端分别和双天线ptk模块、角度传感器的输入端之间相互电性连接。
[0038]
本发明中,优选的,包括以下步骤:
[0039]
步骤一:检查作业机具状态,确保电控系统正常工作,将上述导航系统安装至东方红l954拖拉机内部的车载计算机处,东方红l954拖拉机内的变频器采用v/f的控制方式,其输出电压u与频率给定信号成正比,可以将其等效成为一个一阶惯性环节,具体公式如下:
[0040]
g
inv
(s)=k
inv
/(ts 1)
[0041]
式中,k
inv
为变频器的放大倍率,t为变频器的加速时间;
[0042]
步骤二:在忽略电动机的励磁电流和旋转电动势的动态影响,并认为磁通在动态过程中保持不变的前提下,三相异步电动机的传递函数可以近似等效成为一个一阶惯性环节,其公式如下:
[0043]
g
20
(s)=k
20
/(t
20
s 1)
[0044]
式中,k
20
为电动机的放大倍数,t
20
为电动机的惯性时间常数;
[0045]
步骤三:增益自调整单神经元pid控制器中状态转换器的输入为e(k)=r(k)
‑
y(k),状态转换器的输出为控制器所需要的状态量x1(k)、x2(k)和x3(k),具体公式如下:
[0046]
x1(k)=r(k)
‑
y(k)
[0047]
x2(k)=e(k)
‑
e(k
‑
1)
[0048]
x3(k)=e(k)
‑
2e(k
‑
1) e(k
‑
2);
[0049]
步骤四:对作业机的各项数据进行检测并记录,作业机速度为1.15m/s左右时,变增益单神经元pid控制器直线跟踪的最大横向偏差不超过0.071m,平均绝对偏差不超过0.031m,标准差不超过0.038m,变增益单神经元pid控制器曲线跟踪的最大横向偏差不超过1.121m,平均绝对偏差不超过1.030m,标准差不超过0.525m。
[0050]
本发明中,优选的,步骤三中,对于单神经元pid控制器,增益系数k是最敏感的参数,在一般的控制器中,k的值只是在初始时设定,不具备在线学习的能力,因此在一定程度上限制了该控制器的功能,增益自调整单神经元控制器中系数k具备在线学习功能,这样可以大大提高系统的控制品质以及鲁棒性,本发明通过以东方红l954拖拉机为基础,将其机械转向机构改制为电控液压转向系统,以stm32单片机为控制器,基于pid控制算法实现快速精准转向控制,以双天线rtk
‑
gnss和角度传感器为作业状态采集装置,通过变增益单神经元pid算法控制作业机具进行跟踪路径,并与常规pid和单神经元pid算法进行对比,改善了单神经元调节比例系数k固定的局限,提高了控制器响应速度且降低了超调量,增强了导航系统对旋埋还田作业环境的自适应性。
[0051]
本发明中,优选的,步骤三中,该控制器中,选取改进型hebb算法,则神经元的输出为w1(k)=w1(k
‑
1) n
i
e(k)u(k
‑
1)[2e(k)
‑
e(k
‑
1)],式中:w1(k)和n
i
(i=1,2,3)分别为神经元pid在k时刻所对应的权值和学习速率,当signe(k)=signe(k
‑
1)时,k(k)=k(k
‑
1) ck(k
‑
1)/t(k
‑
1),当signe(k)≠signe(k
‑
1),k(k)=0.7k(k
‑
1)。
[0052]
本发明中,优选的,步骤三中,当signe(k)=signe(k
‑
1)或signe(k)≠signe(k
‑
1)时,k的大小决定了输出的变化率,k的初始值可任意设定,一般选取k>0即可。
[0053]
本发明中,优选的,步骤三的式中,t可表示为t(k)=t(k
‑
1) lsign(丨
△
e(k)丨
‑
t
(k
‑
1)
△
e2(k)),其初始值一般选取较小的正数,c和l的值可以在一定的范围内选取,但都不宜过大,以免使得系统不稳定,在引入了增益自调整后,单神经元pid算法的自学习、自组织能力以及鲁棒性均有明显的提高,本发明通过设置的变增益单神经元pid自适应控制算法,相对常规pid和单神经元pid控制算法,降低了秸秆旋埋还田作业环境对跟踪精度的影响,增强了导航系统对作业环境的适应性和鲁棒性。当作业速度为1.15m/s时,直线跟踪的最大横向偏差不超过0.071m,平均绝对偏差不超过0.031m;曲线跟踪的最大横向偏差不超过1.121m,平均绝对偏差不超过1.030m。其作业效果相对于常规pid和单神经元pid控制算法有较大提升,有效提高了秸秆旋埋还田作业的路径跟踪精度,适用于未来无人驾驶下的秸秆旋埋还田作业。
[0054]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。