1.本发明涉及一种喷漆装置,尤其涉及一种高端装备工业机器人外壳喷漆装置。
背景技术:
2.喷漆是用硝酸纤维素、树脂、颜料、溶剂等制成。当机器人外壳生产制造后,都要对其进行喷漆。目前,大多数都是人工对机器人外壳进行喷漆,首先人们将机器人外壳固定好,然后用手拿着喷漆工具进行喷漆,如此操作比较麻烦,工作效率还低,且机器人外壳喷漆后,需要将其放置在干燥地方进行晾干,十分费时。
3.因此,特别需要一种能够方便人们对机器人外壳进行喷漆,工作效率高,且可以快速烘干的高端装备工业机器人外壳喷漆装置,以解决现有技术中存在的问题。
技术实现要素:
4.为了克服人们需要用手进行喷漆,操作比较麻烦,工作效率还低,且要将机器人外壳放置在干燥地方进行晾干,十分费时的缺点,要解决的技术问题:提供一种能够方便人们对机器人外壳进行喷漆,工作效率高,且可以快速烘干的高端装备工业机器人外壳喷漆装置。
5.技术方案是:一种高端装备工业机器人外壳喷漆装置,包括有:底座,底座一侧设有导流槽板;喷枪,喷枪均匀间隔安装在导流槽板上;传送装置,安装在底座上,用于输送机器人外壳;驱动装置,安装在传送装置上,用于提供动力。
6.进一步地,传送装置包括有:安装架,安装架数量为四个,其间隔安装在底座上;外壳,外壳安装在四个安装架之间;第一转轴,第一转轴数量为四根,其安装在安装架与外壳之间;皮带轮,皮带轮安装在第一转轴上;传送带,传送带安装在两个皮带轮之间;安装块,安装块均匀间隔安装在传送带上;运料杆,运料杆转动式安装在安装块上。
7.进一步地,驱动装置包括有:电机,电机安装在外壳上;l型板,l型板安装在外壳上;第二转轴,第二转轴转动式安装在l型板上;传动组件,传动组件安装在第二转轴与电机的输出轴之间;第一齿轮,第一齿轮数量为两个,其中一个安装在第二转轴上,另外一个安装在第一转轴上,两个第一齿轮相啮合。
8.进一步地,还包括有烘干装置,烘干装置包括有:安装杆,安装杆数量为四根,每两根为一组安装在底座上;烘箱,烘箱安装在两根安装杆之间;热风机,热风机安装在烘箱上;出风管,出风管安装在热风机与烘箱之间并连通;进风管,进风管安装在热风机与烘箱之间并连通。
9.进一步地,还包括有开合装置,开合装置包括有:滑动板,滑动板对称式的滑动式安装在烘箱上;第一齿条,第一齿条安装在滑动板上;异形架,异形架数量为四个,其中两个安装在烘箱上,另外两个安装在外壳上;第四转轴,第四转轴转动式安装在异形架上;第二齿轮,第二齿轮安装在第四转轴上,其与第一齿条啮合;第一滑杆,第一滑杆安装在异形架上;第二齿条,第二齿条滑动式安装在第一滑杆上,其与第二齿轮啮合;第一复位弹簧,第一
复位弹簧绕接在第二齿条与第一滑杆一侧之间;安装板,安装板安装在第二齿条上;第五转轴,第五转轴转动式安装在安装板上;转动板,转动板安装在第五转轴上;扭簧,扭簧安装在转动板与安装板之间,其套于第五转轴上;c型板,c型板转动式安装在运料杆上;第二滑杆,第二滑杆安装在c型板上;接触板,接触板滑动式安装在第二滑杆上,接触板与转动板配合;第二复位弹簧,第二复位弹簧绕接在接触板与第二滑杆一侧之间。
10.进一步地,还包括有旋转装置,旋转装置包括有:连接块,连接块对称式安装在外壳上;第三齿条,第三齿条安装在两个连接块之间;第三齿轮,第三齿轮安装在运料杆上,其与第三齿条啮合。
11.进一步地,还包括有缓冲装置,缓冲装置包括有:支撑板,支撑板安装在底座上;震荡弹簧,震荡弹簧数量为三个,其间隔安装在支撑板上,且三个震荡弹簧尾端之间设有接料板。
12.进一步地,接料板材质为橡胶。
13.有益效果:1、通过将机器人外壳套于前侧运料杆上,然后启动电机,左右两侧传送带向内转动使得安装块向内转动,安装块向内转动带动运料杆向内转动,运料杆向内转动带动机器人外壳向内转动,且启动喷枪运作对机器人外壳进行喷漆,如此,可方便人们对机器人外壳进行喷漆,工作效率高。
14.2、通过烘干装置的作用,可对喷漆完成的机器人外壳进行烘干,如此,可使得喷漆完成机器人外壳快速烘干。
15.3、通过旋转装置的作用,可使得机器人外壳移动时且反转,如此,可使得喷漆时机器人外壳更加均匀。
附图说明
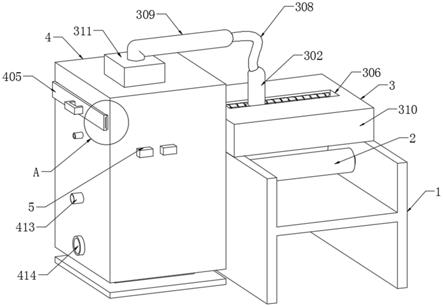
16.图1为本发明的立体结构示意图。
17.图2为本发明的部分剖面结构示意图。
18.图3为本发明传送装置的剖面结构示意图。
19.图4为本发明驱动装置的立体结构示意图。
20.图5为本发明烘干装置的立体结构示意图。
21.图6为本发明开合装置的第一种部分立体结构示意图。
22.图7为本发明a部分的放大示意图。
23.图8为本发明开合装置的第二种部分立体结构示意图。
24.图9为本发明旋转装置的立体结构示意图。
25.图10为本发明缓冲装置的立体结构示意图。
26.图中标记为:1
‑
底座,2
‑
导流槽板,3
‑
喷枪,4
‑
传送装置,41
‑
安装架,42
‑
外壳,43
‑
第一转轴,45
‑
皮带轮,46
‑
传送带,47
‑
安装块,48
‑
运料杆,5
‑
驱动装置,51
‑
电机,52
‑
l型板,53
‑
第二转轴,54
‑
传动组件,55
‑
第一齿轮,6
‑
烘干装置,61
‑
安装杆,62
‑
烘箱,63
‑
热风机,64
‑
出风管,65
‑
进风管,7
‑
开合装置,71
‑
滑动板,72
‑
第一齿条,73
‑
异形架,74
‑
第四转轴,75
‑
第二齿轮,76
‑
第一滑杆,77
‑
第二齿条,78
‑
第一复位弹簧,79
‑
安装板,710
‑
第五转轴,711
‑
转动板,712
‑
扭簧,713
‑
c型板,714
‑
第二滑杆,715
‑
接触板,716
‑
第二复位弹簧,8
‑
旋转
装置,81
‑
连接块,82
‑
第三齿条,83
‑
第三齿轮,9
‑
缓冲装置,91
‑
支撑板,92
‑
震荡弹簧,93
‑
接料板。
具体实施方式
27.以下结合附图和具体实施方式对本发明作进一步详细描述,但不限制本发明的保护范围和应用范围。
28.实施例1一种高端装备工业机器人外壳喷漆装置,如图1
‑
图4所示,包括有底座1、导流槽板2、喷枪3、传送装置4和驱动装置5,底座1顶部中间设有导流槽板2,导流槽板2顶部均匀间隔设有喷枪3,底座1顶部设有传送装置4,传送装置4上设有驱动装置5。
29.传送装置4包括有安装架41、外壳42、第一转轴43、皮带轮45、传送带46、安装块47和运料杆48,底座1顶部间隔设有四个安装架41,四个安装架41顶部之间设有外壳42,安装架41内侧与外壳42之间转动式设有第一转轴43,第一转轴43上部周向固接有皮带轮45,皮带轮45位于外壳42内,前后两侧皮带轮45之间绕有传送带46,传送带46上均匀间隔设有安装块47,安装块47上转动式设有运料杆48。
30.驱动装置5包括有电机51、l型板52、第二转轴53、传动组件54和第一齿轮55,外壳42外顶部后侧右部固接有电机51,外壳42外顶部后侧左部固接有l型板52,l型板52前部转动式设有第二转轴53,第二转轴53上部周向与电机51的输出轴之间连接有传动组件54,第二转轴53下部周向与左后方第一转轴43上部周向都固接有第一齿轮55,左右两侧第一齿轮55相啮合。
31.首先操作人员将机器人外壳套于前侧运料杆48上,然后启动电机51,电机51带动右后方第一转轴43正转,右后方第一转轴43正转带动右后方皮带轮45正转,右后方皮带轮45正转通过右前方皮带轮45带动右方传送带46正转,同时,右后方第一转轴43正转还带动传动组件54正转,传动组件54正转带动第二转轴53正转,第二转轴53带动右方第一齿轮55正转,右方第一齿轮55正转带动左方第一齿轮55反转,左方第一齿轮55反转带动左后方第一转轴43反转,左后方第一转轴43反转带动左后方皮带轮45反转,左后方皮带轮45反转通过左前方皮带轮45带动左方传送带46反转,左右两侧传送带46向内转动使得安装块47向内转动,安装块47向内转动带动运料杆48向内转动,运料杆48向内转动带动机器人外壳向内转动,且启动喷枪3运作对机器人外壳进行喷漆,运料杆48继续向内转动至前侧时,拿下喷漆完成的机器人外壳取下进行后续处理,进而将未喷漆的机器人外壳套于前侧运料杆48上,如此反复,可不断对机器人外壳进行喷漆,当全部的机器人外壳喷漆完成后,关闭电机51,第一转轴43停止通过皮带轮45带动传送带46向内转动,运料杆48也就停止向内转动,再将喷枪3关闭即可。
32.实施例2在实施例1的基础之上,如图1、图2、图5、图6、图7和图8所示,还包括有烘干装置6,烘干装置6包括有安装杆61、烘箱62、热风机63、出风管64和进风管65,底座1顶部左右两侧中部都前后对称固接有安装杆61,前后两侧安装杆61内端之间固接有烘箱62,烘箱62中部设有热风机63,热风机63后侧面与烘箱62后部之间固接有出风管64并连通,热风机63前侧面与烘箱62前部之间固接有进风管65并连通。
33.还包括有开合装置7,开合装置7包括有滑动板71、第一齿条72、异形架73、第四转轴74、第二齿轮75、第一滑杆76、第二齿条77、第一复位弹簧78、安装板79、第五转轴710、转动板711、扭簧712、c型板713、第二滑杆714、接触板715和第二复位弹簧716,烘箱62前后两部都滑动式设有滑动板71,滑动板71外侧面固接有第一齿条72,烘箱62外顶部前部外侧固接有异形架73,外壳42后部左右两侧也都固接有异形架73,异形架73前部下侧转动式设有第四转轴74,第四转轴74中部周向固接有第二齿轮75,第二齿轮75与第一齿条72啮合,异形架73内后侧面固接有第一滑杆76,第一滑杆76上滑动式设有第二齿条77,第二齿条77后侧面与第一滑杆76后部之间绕接有第一复位弹簧78,第二齿条77与第二齿轮75啮合,第二齿条77左侧面后部固接有安装板79,安装板79中部前侧转动式设有第五转轴710,第五转轴710中部周向固接有转动板711,转动板711内侧面与安装板79内侧面之间固接有扭簧712,扭簧712套于第五转轴710上,运料杆48中部周向转动式设有c型板713,c型板713上设有第二滑杆714,第二滑杆714上滑动式接触板715,接触板715与转动板711配合,接触板715后侧面与第二滑杆714一侧之间绕有第二复位弹簧716。
34.当喷枪3运作机器人外壳进行喷漆后,运料杆48向内转动带动机器人外壳移动至烘箱62内,启动热风机63运作,热风机63运作通过出风管64将热气排入烘箱62内对喷漆的机器人外壳进行烘干,且气体通过进风管65回流至热风机63内,当全部的机器人外壳喷漆完成后,关闭热风机63停止运作即可。如此,可使得喷漆完成机器人外壳快速烘干。
35.当安装块47带动运料杆48向内转动时,运料杆48向内转动带动c型板713向内转动,c型板713向内转动带动第二滑杆714向内转动,第二滑杆714向内转动带动接触板715向内转动,接触板715向内转动与转动板711接触,接触板715带动转动板711向前移动,转动板711向前移动带动第五转轴710向前移动,第五转轴710向前移动带动安装板79向前移动,安装板79向前移动带动第二齿条77向前移动,第一复位弹簧78被拉伸,第二齿条77向前移动带动第二齿轮75反转,第二齿轮75反转带动第一齿条72向下移动,第一齿条72向下移动带动滑动板71向下移动,滑动板71向下移动停止对烘箱62进行限位,且接触板715继续向前移动使得第二复位弹簧716被压缩,且接触板715向前移动至最大行程,因扭簧712的作用,接触板715在转动板711上滑过,第一复位弹簧78的作用,第二齿条77带动安装板79向后移动复位,转动板711也就向后移动复位与接触板715脱离,因第二复位弹簧716的作用,接触板715也就向后移动复位,滑动板71也就向上移动复位对烘箱62进行限位,如此,可使得烘箱62定时开合避免热气流失。
36.实施例3在实施例1和实施例2的基础之上,如图1、图2、图9和图10所示,还包括有旋转装置8,旋转装置8包括有连接块81、第三齿条82和第三齿轮83,外壳42内顶部左侧前后对称固接有连接块81,前后两侧连接块81底部之间固接有第三齿条82,运料杆48上部周向固接有第三齿轮83,第三齿轮83与第三齿条82啮合。
37.还包括有缓冲装置9,缓冲装置9包括有支撑板91、震荡弹簧92和接料板93,底座1顶部前侧中部固接有支撑板91,支撑板91内侧面均匀间隔固接有三个震荡弹簧92,三个震荡弹簧92尾端之间固接有接料板93。
38.当运料杆48带动机器人外壳向内转动时,运料杆48向内转动使得第三齿轮83与第三齿条82啮合,进而第三齿轮83带动运料杆48移动且反转,机器人外壳也就移动且反转,当
全部的机器人外壳喷漆完成后,第三齿轮83停止带动运料杆48移动且反转,机器人外壳也就停止移动且反转,如此,可使得喷漆时机器人外壳更加均匀。
39.当操作人员将机器人外壳取下不慎掉落时,机器人外壳掉落至接料板93上,因震荡弹簧92的作用,接料板93对机器人外壳起到缓冲作用,如此,可避免机器人外壳取下不慎掉落产生破损。
40.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。