技术特征:
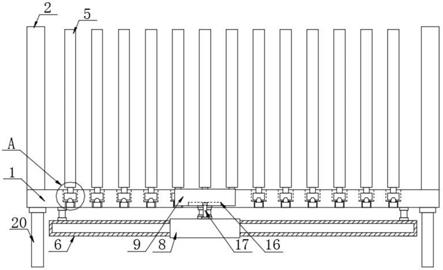
1.一种用于清洁机器人的拖地装置,包括多个依次排列的拖地盘,其特征在于,每个所述拖地盘的形状均相同,在转动过程中,相邻两个拖地盘的边缘之间相互啮合,相邻两个拖地盘的转动方向相反;每个所述拖地盘上设置有用于被所述清洁机器人上的传感器检测到的标记,用于调节所述拖地盘的转速,使得相邻两个拖地盘的边缘之间始终保持啮合状态。2.如权利要求1所述的拖地装置,其特征在于,每个所述拖地盘的形状包括如下任意一种:多边形、三角形、齿形、以及椭圆形;其中,当所述拖地盘的形状为齿形时,每个拖地盘上的齿数相等。3.如权利要求1所述的拖地装置,其特征在于,相邻两个拖地盘的转动范围具有重叠区域。4.如权利要求1所述的拖地装置,其特征在于,所述拖地装置还包括:与每个所述拖地盘固定连接的驱动转盘,用于驱动相应连接的拖地盘转动;其中,每个驱动转盘的旋转轴线通过相应连接的拖地盘的旋转中心。5.一种清洁机器人,其特征在于,所述清洁机器人包括:上述权利要求4所述的拖地装置、底壳、及与每个拖地盘对应的驱动机构;所述驱动机构,用于驱动与所述驱动机构对应的拖地盘和驱动转盘,相对于所述底壳绕驱动转盘的旋转轴线旋转;其中,所述底壳上与每个所述拖地盘对应的区域中设有用于检测所述标记的传感器,并且相邻两个传感器的设置位置相差预设相位差。6.如权利要求5所述的清洁机器人,其特征在于,所述预设相位差为360/2n的奇数倍;其中,n表示拖地盘的边数。7.如权利要求5所述的清洁机器人,其特征在于,所述清洁机器人还包括:控制装置;所述控制装置,用于根据所述底壳上每个传感器检测到标记的时间点之间的时间差,判定拖地盘之间是否相互啮合,如果不啮合,则调节拖地盘的转速,使得拖地盘之间互相啮合。8.一种清洁机器人的运动控制方法,其特征在于,所述方法包括:接收每个拖地盘对应的传感器发送的时间序列;所述时间序列中每个时间点为检测到标记的时间;在每两个相邻传感器的两个时间序列中各自选取一个时间点,其中每个时间点为所在时间序列中离另一个时间点最近的时间点;根据选取的两个时间点确定两个拖地盘的相位差,以得到相位差序列;从所述相位差序列中选取一个最大相位差;根据所述最大相位差确定需要调节拖地盘转速,根据所述最大相位差对应的两个时间点的时间差,调节两个拖地盘的转速。9.如权利要求8所述的方法,其特征在于,所述根据所述最大相位差确定需要调节拖地盘转速,包括:确定最大相位差的逆向相位差;在逆向相位差和最大相位差两者之间选取绝对值最小的值;根据所选取的值大于预设的安全阈值时,确定需要调节拖地盘转速。
10.如权利要求9所述的方法,其特征在于,所述两个拖地盘为第一拖地盘和第二拖地盘,利用所述最大相位差对应的两个时间点的时间差,调节最大相位差对应的两个拖地盘的转速,包括:当第一拖地盘对应的时间点晚于第二拖地盘对应的时间点时,根据所述逆向相位差小于所述最大相位差,降低所述第一拖地盘的转速;根据所述逆向相位差大于所述最大相位差,提高所述第一拖地盘的转速。11.如权利要求10所述的方法,其特征在于,利用所述最大相位差对应的两个时间点的时间差,调节最大相位差对应的两个拖地盘的转速,包括:当第一拖地盘对应的时间点早于第二拖地盘对应的时间点时,根据所述逆向相位差小于所述最大相位差,提高所述第一拖地盘的转速;根据所述逆向相位差大于所述最大相位差,降低所述第一拖地盘的转速。
技术总结
本发明公开一种拖地装置、清洁机器人及运动控制方法,拖地装置包括多个依次排列的拖地盘,每个拖地盘的形状均相同,在转动过程中,相邻两个拖地盘之间相互啮合,转动方向相反;每个拖地盘上设置有用于调节拖地盘转速的标记。通过将拖地盘设置为互相啮合状态,使得相邻拖地盘之间的缝隙不断左右变化,这样拖地盘通过旋转工作,可以一次性清除清洁区域内的所有灰尘或污垢,提高了清洁效率。通过在每个拖地盘上增设标记,在清洁机器人上对应每个拖地盘设置能检测到标记的传感器,从而随着拖地盘的转动,可以根据每个传感器检测到标记的时间点之间的时间差动态调节拖地盘的转速,避免出现拖地盘之间运动干涉的问题。地盘之间运动干涉的问题。地盘之间运动干涉的问题。
技术研发人员:张涛 张猛 丁铁
受保护的技术使用者:美智纵横科技有限责任公司
技术研发日:2021.04.09
技术公布日:2021/10/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。