1.本发明涉及一种车辆控制装置、车辆控制方法以及车辆控制系统。
背景技术:
2.在专利文献1中,公开了一种估计车辆的行驶道路的倾斜(cant)的倾斜估计方法。
3.该倾斜估计方法包括:取得包含包括第1车辆的多个车辆的速度、横向加速度、转向角、横摆率以及位置的信息的车辆信息的步骤;基于车辆信息,估计第1车辆的行驶道路的倾斜的步骤;以及将所估计的倾斜与第1车辆的位置的信息进行关联,并存储于能够由多个车辆利用的倾斜角数据库的步骤。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2019-172220号公报
技术实现要素:
7.发明要解决的课题
8.而在使车辆的实际轨迹追随目标轨迹的自动驾驶中,例如,若车辆行驶在具有左右坡度(换言之,横向坡度)的道路上,则存在实际轨迹因重力而偏向坡度的低的一侧,实际轨迹相对于目标轨迹的追随性降低的情况。
9.此外,侧风也可能导致使车辆偏转的外力施加于车辆,实际轨迹偏离目标轨迹,而且车轮定位(alignment)等涉及车辆10的偏转的车辆特性也可能导致实际轨迹偏离目标轨迹。
10.在此,为了抑制因道路的左右坡度或侧风等干扰而导致对目标轨迹的追随性降低,需要高精度地估计干扰量,将转向控制指令等控制指令设为与干扰量相称(見合
う
)的指令。
11.然而,在基于例如车速、横向加速度、横摆率等与车辆运动有关的信息来估计干扰量的处理中,难以高精度地估计干扰量,即使车辆控制装置基于干扰量的估计结果来控制车辆,也无法充分抑制实际轨迹相对于目标轨迹的追随性因干扰而降低。
12.本发明是鉴于以往的实际情况而完成的,其目的在于提供一种能够高精度地估计干扰量,提高对目标轨迹的追随性的车辆控制装置、车辆控制方法以及车辆控制系统。
13.用于解决课题的手段
14.根据本发明,在其一个方式中,取得与车辆的目标轨迹和所述车辆的实际轨迹的左右方向的位置的差有关的信息,利用与所述左右方向的位置的差有关的信息,对与所述左右方向的位置的差相当的干扰量进行估计,利用所述干扰量,求出用于使所述车辆追随所述目标轨迹的控制指令。
15.发明的效果
16.根据本发明,能够高精度地估计干扰量,提高对目标轨迹的追随性。
附图说明
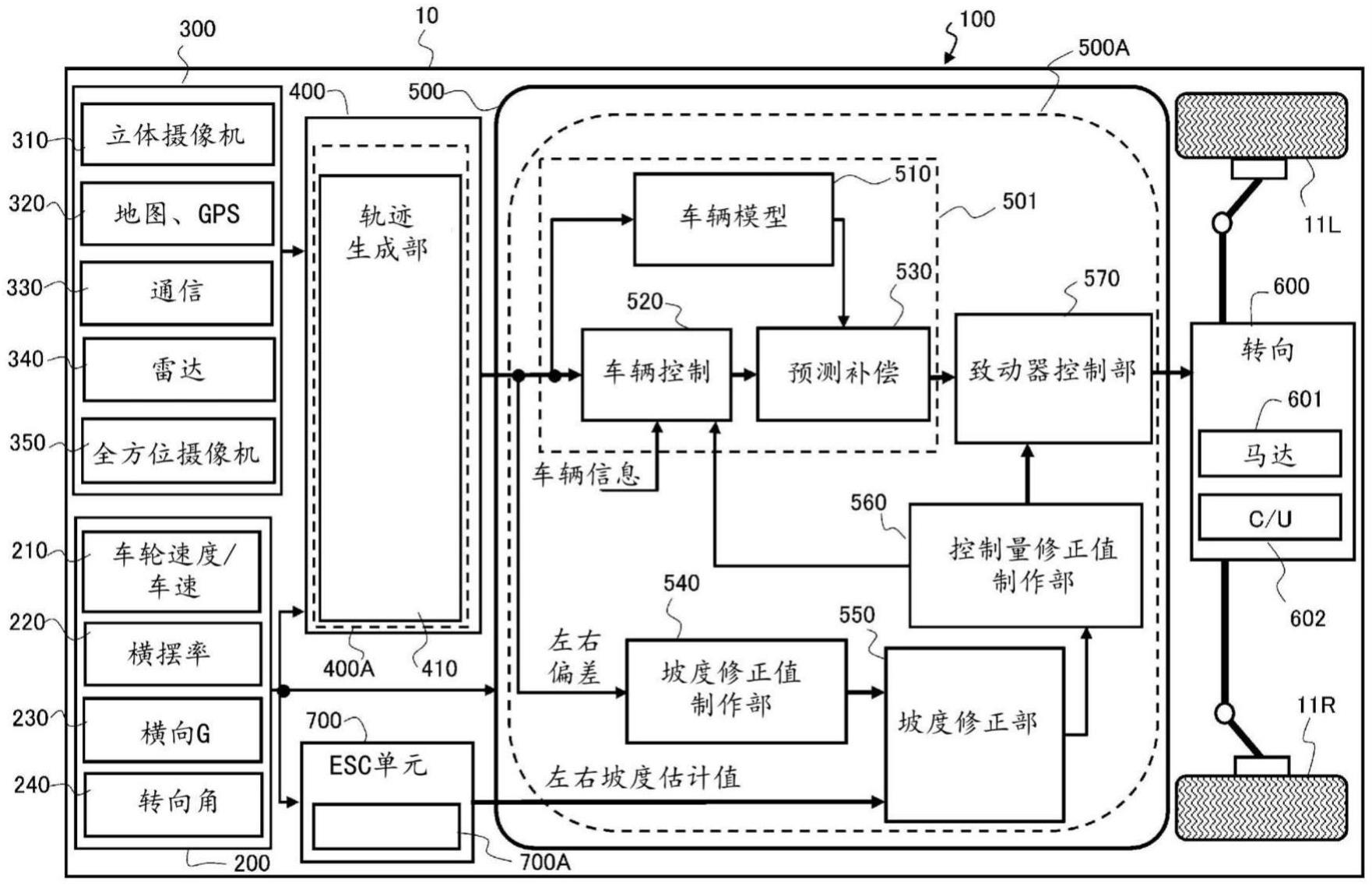
17.图1是表示车辆控制系统的第1实施方式的框图。
18.图2是表示用于计算横向加速度指令的各种变量以及坐标系的一方式的图。
19.图3是表示作为直线距离的左右偏差的图。
20.图4是表示作为沿着路面的长度的左右偏差的图。
21.图5是表示基于左右坡度的左右偏差的发生状态的图。
22.图6是例示左右偏差和左右坡度估计值的变化的时序图,是表示未限制左右坡度估计值的变化的状态的时序图。
23.图7是例示左右偏差和左右坡度估计值的变化的时序图,是表示限制了左右坡度估计值的变化的状态的时序图。
24.图8是表示车辆控制系统的第2实施方式的框图。
25.图9是表示车辆控制系统的第3实施方式的框图。
26.图10是用于说明基于横摆率、车速、以及横向加速度的左右坡度的估计处理的图。
27.图11是表示对横向加速度指令实施转向控制以及制动力控制的系统的框图。
具体实施方式
28.以下,基于附图对本发明所涉及的车辆控制装置、车辆控制方法、以及车辆控制系统的实施方式进行说明。
29.图1是表示车辆控制系统100的第1实施方式的框图。
30.车辆控制系统100搭载于四轮汽车等车辆10。
31.并且,车辆控制系统100在自动驾驶中,控制基于电子控制动力转向装置600的转向角,以使车辆10追随目标轨迹(换言之,目标路径)。
32.车辆控制系统100具有车辆状态检测装置200、外界识别装置300、自动驾驶控制装置400、车辆运动控制装置500、电子控制动力转向装置600、esc(电子稳定性控制(electric stability control))单元700。
33.自动驾驶控制装置400、车辆运动控制装置500、以及esc单元700是以基于输入的信息进行运算并输出运算结果的微型计算机400a、500a、700a为主体的电子控制装置。
34.微型计算机400a、500a、700a具备mpu(微处理器单元(microprocessor unit))、rom(只读存储器(read only memory))、ram(随机存取存储器(random access memory))等。
35.自动驾驶控制装置400的微型计算机400a具有用于运算目标轨迹的轨迹生成部410的功能。
36.轨迹生成部410利用车辆状态检测装置200以及外界识别装置300,取得车辆10的位置信息(换言之,本车位置的信息)、车辆的驾驶状态信息、以及周边信息,基于所取得的各信息来计算目标轨迹。
37.并且,车辆运动控制装置500的微型计算机500a计算用于使车辆10追随由自动驾驶控制装置400计算出的目标轨迹的转向控制指令,具体而言,是转向角控制指令或者转向转矩控制指令,并向电子控制动力转向装置600输出计算出的转向控制指令。
38.电子控制动力转向装置600是通过改变车辆10的前轮11l、11r的角度而改变车辆
10的行进方向的转向装置。
39.电子控制动力转向装置600具备用于改变作为转向轮的前轮11l、11r的角度的马达等转向致动器601、以及作为控制转向致动器601的致动器控制装置的转向控制单元602。
40.转向控制单元602基于从车辆运动控制装置500取得的转向控制指令来控制转向致动器601,实现与转向控制指令相应的转向角或者转向转矩。
41.即,在车辆控制系统100中,自动驾驶控制装置400生成车辆10的目标轨迹,车辆运动控制装置500求出用于使车辆10追随目标轨迹的控制指令,转向控制单元602取得控制指令而控制转向致动器601。
42.车辆状态检测装置200具备:检测车轮速度或者车速的车轮速度/车速传感器210、检测车辆10的横摆率的横摆率传感器220、检测车辆10的横向加速度的横向g传感器230、检测前轮11l、11r的转向角的转向角传感器240。
43.此外,外界识别装置300具备:立体摄像机310、导航系统320、车车间通信装置330、雷达340、全方位摄像机350。
44.立体摄像机310检测、识别车辆10的周围的对象物,并求出到对象物的距离等。
45.即,立体摄像机310根据左右的摄像机的视角(見
え
方)的偏差来测定视差,并利用三角测定的原理来计算到对象物的距离。
46.导航系统320具备gps(全球定位系统(global positioning system))接收部以及地图数据库,取得车辆10的当前位置的信息、到目的地的路径的信息等。
47.导航系统320的gps接收部通过从gps卫星接收信号,测定车辆10的位置的纬度以及经度。
48.导航系统320的地图数据库是形成于车辆10所搭载的存储装置内的数据库,地图信息包含道路位置、道路形状、交叉路口位置等信息。
49.车车间通信装置330通过车辆间相互的无线通信,从其他车辆取得道路交通信息、其他车辆的行为信息、其他车辆的位置信息等。
50.雷达340进行车辆10的前方障碍物的检测,进一步地进行到前方障碍物的距离或前方障碍物的速度的测定,作为与前方障碍物有关的信息输出。
51.全方位摄像机350是转换从安装于车辆10的前后左右的多个摄像机得到的影像的视点,得到从上俯视本车的图像,即俯瞰图像的装置。
52.自动驾驶控制装置400基于从外界识别装置300取得的本车位置或本车周围的物体的信息等,识别本车周边的状况,并基于识别结果,生成作为车辆10的行驶路径的目标的目标轨迹。
53.在此,自动驾驶控制装置400根据基于gps的定位、定位推算(dead reckoning)、基于立体摄像机310等的周边状况的识别结果、进一步地通过车车间通信从行驶于周围的其他车辆得到的信息等,取得车辆10的位置信息。
54.利用基于定位推算的定位、或基于立体摄像机310等的周边状况的识别结果而取得车辆10的位置信息的方法是基于车载传感器的信号来取得与车辆10的位置有关的信息的方法。
55.在定位推算中,例如,基于车辆10的车速、横摆角来估计车辆10的位置。
56.另一方面,根据基于gps的定位、或通过车车间通信从行驶于周围的其他车辆得到
的信息等取得车辆10的位置信息的方法是基于从车辆10的外部接收到的信号而取得与车辆10的位置有关的信息的方法。
57.并且,在基于gps的定位中,从车辆10的外部接收到的信号是从gps卫星接收到的信号,具体而言,是时刻的数据、卫星的轨迹的信息等。
58.此外,在利用了车车间通信的定位中,从车辆10的外部接收到的信号是通过车车间通信从其他车辆接收到的信号。
59.esc单元700在探测到车辆10打滑的行为时,通过控制车辆10的驱动装置的输出以及/或者车辆10的制动装置中的各个车轮的制动压力,实施稳定地保持车辆10的姿态的控制。
60.esc单元700从车辆状态检测装置200取得车辆10的车速、横向加速度、转向角、横摆率等信息,并基于所取得的车辆信息,监视驾驶者的驾驶操作以及车辆10的动作。并且,esc单元700基于驾驶者的驾驶操作以及车辆10的动作,使用于稳定地保持车辆10的姿态的功能工作。
61.此外,esc单元700基于所取得的车辆信息,估计车辆10所行驶的道路的左右坡度,并将所估计的左右坡度的信息输出到车辆运动控制装置500。
62.车辆运动控制装置500具有:车辆模型510、控制部520、预测(predictive)补偿部530、坡度修正值制作部540、坡度修正部550、控制量修正值制作部560、致动器控制部570。
63.在此,车辆模型510、控制部520、以及预测补偿部530构成求出用于使车辆10追随目标轨迹的控制指令的追随控制部501。
64.追随控制部501利用模型预测控制(model predictive control)运算用于使车辆10追随由自动驾驶控制装置400生成的目标轨迹的控制指令即横向加速度指令。
65.模型预测控制是利用控制对象的模型来预测未来的行为并在各个时刻一边解决最优化问题一边决定控制对象的操作量的、公知的控制方法。
66.在车辆运动控制装置500(具体而言,追随控制部501)中的模型预测控制中,利用车辆模型510预测规定的预测时间后(例如,500ms后)的响应,探索减小预测区间中的追随误差的横向加速度指令yd2c(换言之,横向加速度的目标值)。
67.利用该模型预测控制,能够抑制因电子控制动力转向装置600的转向致动器601的响应延迟等而导致车辆10对目标轨迹的追随性降低,此外,通过前馈控制能够实现自然的轨迹控制。
68.车辆运动控制装置500取得车辆10(换言之,车辆10的实际轨迹)和目标轨迹之间的距离即左右方向的位置的差(以下,称为“左右偏差”。)、车辆10的朝向(换言之,相对于目标轨迹的车辆10的行进方向)、以及目标轨迹的曲率的信息。
69.并且,车辆运动控制装置500基于左右偏差(换言之,横向位置偏差)、车辆10的朝向、以及目标轨迹的曲率,计算出横向加速度指令yd2c,以使左右偏差变小。
70.即,车辆运动控制装置500具有作为左右方向差取得部的功能,所述左右方向差取得部取得与车辆10的目标轨迹和车辆10的实际轨迹的左右方向的差有关的信息。
71.图2是表示用于计算横向加速度指令yd2c的各种变量以及坐标系的一方式的图。
72.另外,图2的最接近点p是在目标轨迹上距离车辆10的位置、具体而言车辆10的重心cg最近的点。
73.此外,图2的轨迹切线方向与最接近点p处的目标轨迹的切线方向平行,是通过车辆10的重心cg的假想线。
74.并且,采用以车辆10的重心cg为原点、以轨迹切线方向为x轴、以从重心cg朝向最接近点p的方向为y轴的坐标系。
75.数学式1是横向加速度指令yd2c的运算式。
76.[数学式1]
[0077][0078]
在数学式1中,g1、g2、g3是作为常数给定的增益,r是目标轨迹的曲率,v是车速,δy是车辆10的重心cg和目标轨迹的左右偏差(具体而言,是从车辆10的重心到最接近点为止的距离),δyd1是车辆10朝向目标轨迹的速度,θ是车辆10相对于目标轨迹的切线的角度(换言之,朝向),yd2r是与目标轨迹的曲率r相当的离心加速度。
[0079]
另外,左右偏差δy作为根据本车位置的定位方法而不同的物理量而被取得。例如,左右偏差δy作为设有左右坡度的实际的路面上的左右偏差、即沿着路面的长度的信息而被取得。或者,左右偏差δy作为假设为未设有左右坡度的假想平面上的左右偏差、即直线距离的信息而被取得。
[0080]
图3表示作为直线距离的信息的左右偏差δy,图4表示作为沿着路面的长度的信息的左右偏差δy。
[0081]
另外,在图3以及图4中,贯穿纸面的方向为车辆10的行进方向。
[0082]
例如,在车辆控制系统100利用导航系统320的gps接收部检测本车位置的情况下,由于本车位置通过纬度和经度的gps坐标被检测出,因而路面的左右坡度不被考虑,左右偏差δy如图3所示,被作为直线距离的信息而求出。
[0083]
另一方面,在车辆控制系统100通过基于与车辆运动有关的信息的定位推算检测本车位置的情况下,由于本车位置考虑路面坡度的影响而被估计,因而左右偏差δy如图4所示,被作为沿着路面的长度的信息而求出。
[0084]
进一步地,在车辆控制系统100根据基于立体摄像机310、雷达340、全方位摄像机350等的外界识别的结果来检测本车位置的情况下,由于对实际在路面上行驶的车辆10的外界进行识别,因而左右偏差δy如图4所示,被作为沿着路面的长度的信息而求出。
[0085]
不过,在根据路面的左右坡度对基于外界识别的结果而求出的本车位置的信息进行修正的情况下,或在基于外界识别的结果参照地图数据来估计本车位置的情况下等,左右偏差δy如图3所示,被作为直线距离的信息而求出。
[0086]
致动器控制部570将从追随控制部501取得的横向加速度指令yd2c转换为作为转向角或者转向转矩的控制指令的转向控制指令,并将该转向控制指令输出到电子控制动力转向装置600的转向控制单元602。
[0087]
并且,转向控制单元602通过基于所取得的转向控制指令来控制转向致动器601,从而使横向加速度指令yd2c实现。
[0088]
另一方面,坡度修正值制作部540、坡度修正部550、以及控制量修正值制作部560利用左右偏差δy的信息估计使车辆10的轨迹向左右方向偏转的干扰量,并利用所估计的干扰量来修正横向加速度指令yd2c(或者转向控制指令)。
[0089]
即,车辆运动控制装置500具备利用左右偏差δy的信息来估计与左右偏差δy相当的干扰量的干扰估计部、以及利用所估计的干扰量来求出用于使车辆10追随目标轨迹的控制指令的追随控制部的功能。
[0090]
在此,使车辆10的轨迹向左右方向偏转的干扰包括:道路的左右坡度、通过侧风等作用于车辆10而使车辆10的轨迹向左右方向偏转的外力、以及使车辆10的轨迹向左右方向偏转的车轮定位等车辆特性。
[0091]
例如,若道路具有左右坡度,则有时车辆10的实际轨迹因重力而从目标轨迹向坡度低的一侧偏移,对目标轨迹的追随性降低。
[0092]
此外,在相对于车辆10的行进方向正交的方向的侧风吹拂的情况下,有时车辆10的实际轨迹因风压而从目标轨迹向下风方向偏移,对目标轨迹的追随性降低。
[0093]
图5表示具有左右坡度的道路上的左右偏差δy的发生状态。
[0094]
在图5的情况下,由于是具有车辆10的行进方向的右侧高而左侧低的左右坡度的道路,因而车辆10的轨迹因重力偏移到目标轨迹的左侧(换言之,坡度低的一侧)而产生左右偏差δy。
[0095]
若因左右坡度或风等干扰而产生左右偏差δy,则追随控制部501利用数学式1而求出的横向加速度指令yd2c向减小左右偏差δy的方向被变更。
[0096]
然而,由于利用了数学式1的横向加速度指令yd2c的计算处理适合于没有干扰的状态下的左右偏差δy的缩小,因而即使按照根据数学式1计算出的横向加速度指令yd2c被实施转向控制,有时向目标轨迹的收敛也会延迟,也会产生稳态偏差。
[0097]
因此,车辆运动控制装置500通过估计左右坡度或侧风等干扰量,并基于所估计的干扰量来修正按照数学式1计算出的横向加速度指令yd2c(或者转向控制指令),从而抑制对目标轨迹的追随性因干扰而降低。
[0098]
另外,若仅着眼于左右坡度,则数学式1是假设为车辆10行驶的路面的左右坡度为零而导出横向加速度指令yd2c的数学式。因此,车辆运动控制装置500修正横向加速度指令yd2c(或者转向控制指令),以补偿目标轨迹中的路面的左右坡度、与车辆10的实际轨迹中的路面的左右坡度之差。
[0099]
就图1所示的车辆控制系统100而言,车辆运动控制装置500从esc单元700取得左右坡度的估计值的信息,但若该左右坡度的估计值在对于干扰的用于抑制追随性的降低的控制中使用则精度低。
[0100]
因此,坡度修正值制作部540利用左右偏差δy求出用于修正esc单元700所估计的左右坡度估计值lrg1[deg]的左右坡度修正值δlrg。
[0101]
并且,坡度修正部550利用坡度修正值制作部540所制作出的左右坡度修正值δlrg来修正esc单元700所估计的左右坡度估计值lrg1,求出最终的左右坡度估计值lrg。
[0102]
由此,左右坡度估计值lrg成为高精度地反映了左右坡度、侧风、乃至车辆特性等使车辆10偏转的各种干扰的值。
[0103]
控制量修正值制作部560基于左右坡度估计值lrg(换言之,干扰量的估计值)来求出控制量修正值,并利用求出的控制量修正值修正按照数学式1计算出的横向加速度指令yd2c(或者,基于按照数学式1计算出的横向加速度指令yd2c的转向控制指令)。
[0104]
例如,在车辆10行驶于具有左右坡度的道路的情况下,朝向左右坡度低的方向产
生重力的分力,由于车辆10被该分力牵引,因而目标轨迹和实际轨迹产生左右偏差δy。
[0105]
因此,坡度修正值制作部540假设为基于左右偏差δy控制的横向加速度与重力加速度的分力平衡,求出左右坡度修正值δlrg。
[0106]
若假设为基于左右偏差δy控制的横向加速度与重力加速度的分力平衡,则根据数学式1导出数学式2。
[0107]
[数学式2]
[0108][0109]
在此,若将左右偏差δy假设为恒定,将角度θ以及曲率r设为零,则数学式2被变换为数学式3。
[0110]
[数学式3]
[0111]
yd2c=g1
·
δy[m] 重力的分力=0
[0112]
因此,若设增益g1为1,则能够根据数学式4求出左右坡度修正值δlrg。
[0113]
[数学式4]
[0114][0115]
即,左右坡度修正值δlrg能够由重力加速度的分力[m/s2]、和重力加速度[9.8m/s2]的反正弦导出。
[0116]
例如,若设左右偏差δy为0.2m,则左右坡度修正值δlrg如数学式5所示,成为δlrg=1.169[deg]。
[0117]
[数学式5]
[0118][0119]
坡度修正部550取得由坡度修正值制作部540求出的左右坡度修正值δlrg的信息、以及esc单元700所估计的左右坡度估计值lrg1,并按照数学式6,求出最终的左右坡度估计值lrg[deg]。
[0120]
[数学式6]
[0121]
lrg=lrg1 δlrg
[0122]
例如,在左右偏差δy为零、车辆10的实际轨迹能够追随目标轨迹的情况下,坡度修正值制作部540将左右坡度修正值δlrg计算为0[deg],坡度修正部550将esc单元700所估计的左右坡度估计值lrg1直接设定为最终的左右坡度估计值lrg。
[0123]
另一方面,在车辆10相对于目标轨迹行驶于左右坡度低的一侧的情况下,坡度修正值制作部540计算出用于对左右坡度估计值lrg1进行增大修正的左右坡度修正值δlrg,坡度修正部550将通过左右坡度修正值δlrg使esc单元700所估计的左右坡度估计值lrg1增大了的结果设定为最终的左右坡度估计值lrg。
[0124]
此外,在车辆10相对于目标轨迹行驶于左右坡度高的一侧的情况下,坡度修正值制作部540计算出用于对左右坡度估计值lrg1进行减少修正的左右坡度修正值δlrg。
[0125]
坡度修正部550将通过左右坡度修正值δlrg使esc单元700所估计的左右坡度估
计值lrg1减少了的结果设定为最终的左右坡度估计值lrg。
[0126]
即,左右偏差δy受基于esc单元700的左右坡度估计值lrg1的估计误差、侧风、或车辆特性的波动等影响而产生。因此,作为通过基于左右偏差δy的左右坡度修正值δlrg对左右坡度估计值lrg1进行了修正的结果的左右坡度估计值lrg,成为高精度地表示左右坡度或侧风等干扰量的信息。
[0127]
控制量修正值制作部560从坡度修正部550取得左右坡度估计值lrg的信息,并基于左右坡度估计值lrg,求出用于抑制基于左右坡度的左右偏差δy的产生的控制量修正值。
[0128]
在上述数学式1中,由于未考虑左右坡度或侧风等使车辆10偏转的干扰,而以减小左右偏差δy的方式计算出横向加速度指令yd2c,因而若产生干扰则对目标轨迹的追随性降低。
[0129]
因此,控制量修正值制作部560通过根据干扰量(即,左右坡度估计值lrg)修正按照数学式1计算出的横向加速度指令yd2c,从而将横向加速度指令yd2c修正为预估了干扰量的值。
[0130]
通过与该左右坡度估计值lrg相应的横向加速度指令yd2c的修正处理,即使存在干扰,也会抑制对目标轨迹的追随性降低。
[0131]
另外,在车辆10的起步时等,有时会检测出大的左右偏差δy,若基于该左右偏差δy计算出左右坡度修正值δlrg,则可能使对目标轨迹的追随性降低。
[0132]
因此,在左右偏差δy大于上限值的情况下,坡度修正值制作部540通过将左右坡度修正值δlrg设为零,从而直接利用左右坡度估计值lrg1来被实施横向加速度指令yd2c的修正处理。
[0133]
在此,所述上限值作为仅限于在车辆10的起步时等左右偏差δy超过的值而被设定。
[0134]
即,车辆运动控制装置500在左右偏差δy处于规定范围外时,不进行利用了左右偏差δy的信息的干扰量的估计。
[0135]
此外,在车辆10不使用目标轨迹而行驶的情况下,坡度修正值制作部540以及坡度修正部550停止左右坡度估计值lrg1的修正。
[0136]
进一步地,由于道路的左右坡度在道路的构造上不会急剧地变化,因而坡度修正值制作部540或者坡度修正部550即使在左右偏差δy急剧地变化的情况下,也使左右坡度修正值δlrg或者最终的左右坡度估计值lrg逐渐地变化,进而,将横向加速度指令yd2c的变化速度限制于规定范围内。
[0137]
图6以及图7是表示相对于左右偏差δy的急剧变化的左右坡度估计值lrg(或者左右坡度修正值δlrg)的变化的图。图6表示将左右偏差δy的急剧变化直接反映到最终的左右坡度估计值lrg的情况。图7表示使最终的左右坡度估计值lrg对左右偏差δy的急剧变化逐渐地追随的情况。
[0138]
在图6的情况下,根据左右偏差δy的急剧变化,最终的左右坡度估计值lrg也急剧变化。与此相对,在图7的情况下,由于基于上限值对左右坡度估计值lrg或者左右坡度修正值δlrg的每一计算周期的变化量进行限制,因而即使左右偏差δy急剧变化,最终的左右坡度估计值lrg也逐渐地变化。
[0139]
这样,即使左右偏差δy急剧变化,只要使最终的左右坡度估计值lrg逐渐地变化,就会抑制横向加速度指令yd2c伴随左右偏差δy的急剧变化而急剧变化,能够抑制转向角的急剧变化而实现平滑的车辆运动。
[0140]
此外,在追随控制部501如上所述实施模型预测控制的情况下,坡度修正值制作部540能够根据左右偏差δy的预测值与实际值之差,换言之,过去的时间点的预测值与当前的实际值之差,计算出左右坡度修正值δlrg。
[0141]
例如,在追随控制部501估计500ms后的左右偏差δy
z-50
的情况下,坡度修正值制作部540如数学式7所示,基于作为500ms前的预测值的左右偏差δy
z-50
与作为当前时间点的实际值的左右偏差δy之差(换言之,预测误差),计算出左右坡度修正值δlrg。
[0142]
[数学式7]
[0143][0144]
车辆运动控制装置500在按照数学式7求出左右坡度修正值δlrg的情况下,基于作为预测值的左右偏差δy
z-50
与作为实际值的左右偏差δy之差,修正作为实际值的左右坡度估计值lrg1,估计干扰量。
[0145]
而在图1所示的车辆控制系统100中,车辆运动控制装置500获取esc单元700所估计的左右坡度估计值lrg1的信息,但并不将估计左右坡度的外部的电子控制装置限定为esc单元700。
[0146]
例如,在车辆10具备主动悬架(active suspension)的情况下,车辆运动控制装置500能够取得主动悬架的电子控制装置基于g传感器(加速度传感器)的检测输出而估计的左右坡度的信息,并基于左右偏差δy修正所取得的左右坡度估计值。
[0147]
主动悬架是通过对悬架施加液压的力从而控制车辆10的动作的装置。该主动悬架一般而言具有检测根据路面的凹凸或车辆10的行驶状态而产生的振动或摆动的加速度传感器。
[0148]
并且,主动悬架的电子控制装置能够根据加速度传感器的检测输出估计左右坡度。
[0149]
此外,在立体摄像机310的图像处理装置或者取得立体摄像机310的图像的自动驾驶控制装置400中,能够设为由车辆运动控制装置500取得根据立体摄像机310的图像求出的左右坡度的信息的系统。
[0150]
进一步地,车辆运动控制装置500能够根据左右偏差δy的信息直接求出用于追随控制的左右坡度估计值lrg的信息,来代替基于左右偏差δy修正从外部取得的左右坡度估计值lrg1的信息而得到用于追随控制的左右坡度估计值lrg的信息。
[0151]
图8是表示车辆控制系统100的第2实施方式的框图,该图8所示的车辆运动控制装置500根据左右偏差δy的信息直接计算出用于追随控制的左右坡度估计值lrg的信息。
[0152]
图8的车辆运动控制装置500具有坡度估计部580,代替图1的车辆运动控制装置500中的坡度修正值制作部540以及坡度修正部550。
[0153]
坡度估计部580取得左右偏差δy的信息,并输出左右坡度估计值lrg的信息。
[0154]
具体而言,坡度估计部580将按照数学式4或者数学式7计算出的角度的信息直接设为左右坡度估计值lrg,并输出到控制量修正值制作部560。
[0155]
并且,控制量修正值制作部560基于从坡度估计部580取得的左右坡度估计值lrg求出用于根据使车辆10偏转的干扰来修正横向加速度指令yd2c的修正值。
[0156]
在图8的车辆控制系统100中,也能够设定预估了包含左右坡度的干扰量的横向加速度指令yd2c,并能够抑制对目标轨迹的追随性因干扰而降低。
[0157]
此外,在图8的车辆控制系统100中,车辆运动控制装置500无需从外部取得左右坡度估计值lrg1的信息,此外,在车辆运动控制装置500中,无需左右坡度估计值的修正处理,能够简化车辆运动控制装置500的结构、处理。
[0158]
此外,车辆运动控制装置500能够具备根据车辆10的横向加速度、横摆率、车速等的车辆运动信息估计左右坡度的功能,并进一步地具备基于左右偏差δy来修正左右坡度估计值的功能。
[0159]
图9是表示车辆控制系统100的第3实施方式的框图。
[0160]
图9所示的车辆运动控制装置500根据横向加速度、横摆率、车速求出左右坡度估计值lrg2,另一方面,基于左右偏差δy的信息求出左右坡度修正值δlrg。并且,车辆运动控制装置500基于通过左右坡度修正值δlrg对左右坡度估计值lrg2进行修正而得到的左右坡度估计值lrg来实施追随控制。
[0161]
图9的车辆运动控制装置500相对于图1的车辆运动控制装置500,附加了基于从车辆状态检测装置200取得的车辆运动状态的信息来估计左右坡度的坡度估计部590。
[0162]
图10是用于说明坡度估计部590中的、基于车辆运动状态的信息的、具体而言基于横摆率、车速、以及横向加速度的左右坡度估计值lrg2的计算处理的图。
[0163]
坡度估计部590首先基于横摆率的检测值以及车速的检测值求出施加于车辆10的离心力。
[0164]
离心力=横摆率
×
车速
[0165]
接着,坡度估计部590基于离心力的计算结果、以及横向加速度的检测值求出对车辆10在横向方向上施加的力。
[0166]
在横向方向上施加的力[g]=横向加速度-离心力
[0167]
然后,坡度估计部590基于在横向方向上施加的力的计算结果求出左右坡度估计值lrg2。
[0168]
左右坡度估计值lrg2=sin-1
(在横向方向上施加的力)
[0169]
另一方面,坡度修正值制作部540与图1所示的车辆控制系统100的坡度修正值制作部540同样地,按照数学式4或者数学式7,基于左右偏差δy求出左右坡度修正值δlrg。
[0170]
坡度修正部550取得由坡度估计部590求出的左右坡度估计值lrg2、和由坡度修正值制作部540求出的左右坡度修正值δlrg,并将通过左右坡度修正值δlrg对左右坡度估计值lrg2进行了修正的结果设定为最终的左右坡度估计值lrg。
[0171]
即,图9所示的车辆运动控制装置500在利用与左右偏差δy有关的信息的同时,还利用与车辆10的横向加速度有关的信息、与车辆10的横摆率有关的信息、以及与车辆10的车速有关的信息,来估计使车辆10偏转的干扰量。
[0172]
在图9的车辆控制系统100中,也能够设定预估了包含左右坡度的干扰量的横向加速度指令yd2c,并能够抑制对目标轨迹的追随性因干扰而降低。
[0173]
而车辆运动控制装置500(具体而言,致动器控制部570)作为用于使车辆10的实际
轨迹追随目标轨迹的控制,能够具备对基于电子控制动力转向装置600的转向进行控制的功能、以及变更制动装置中的制动力指令的左右分配(换言之,制动力的左右差)的控制功能。
[0174]
图11是表示车辆运动控制装置500具备转向控制功能以及制动控制功能的、车辆控制系统100的框图。
[0175]
图11所示的致动器控制部570对基于作为转向装置的电子控制动力转向装置600的转向、和基于制动装置900的制动力进行控制,以使车辆10的实际轨迹追随目标轨迹。
[0176]
制动装置900是能够分别调整车辆10的各车轮的制动力的制动装置,例如是能够分别调整供给到各车轮的制动液压的液压式的制动装置。
[0177]
并且,致动器控制部570将横向加速度指令yd2c转换为作为转向角或者转向转矩的指令的转向控制指令、和制动液压指令(具体而言,制动液压的左右分配指令),并将转向控制指令输出到电子控制动力转向装置600,将制动液压指令输出到制动装置900。
[0178]
即,车辆运动控制装置500通过控制基于电子控制动力转向装置600的转向、和基于制动装置900的制动力中的至少一方,能够实现横向加速度指令yd2c。
[0179]
例如,车辆运动控制装置500能够将基于电子控制动力转向装置600的转向的控制作为主体,使车辆10的实际轨迹追随目标轨迹,并通过改变制动力的左右差而对目标轨迹和实际轨迹的偏差进行细微修正。
[0180]
此外,车辆运动控制装置500的致动器控制部570具备对基于电子控制动力转向装置600的转向进行控制的功能,以及对基于车辆10的驱动装置的、左右轮上的驱动力的差进行控制的功能。
[0181]
并且,致动器控制部570通过控制基于电子控制动力转向装置600的转向、和基于驱动装置的驱动力中的至少一方,能够实现横向加速度指令yd2c。
[0182]
进一步地,车辆运动控制装置500的致动器控制部570通过控制基于电子控制动力转向装置600的转向、基于制动装置900的制动力、和基于驱动装置的驱动力,能够实现横向加速度指令yd2c。
[0183]
即,车辆运动控制装置500的致动器控制部570通过控制车辆10的转向装置以及制动驱动装置中的至少1个,能够实现横向加速度指令yd2c。
[0184]
在上述实施方式中说明的各种技术性思想只要不产生矛盾,能够酌情组合使用。
[0185]
此外,尽管参照优选的实施方式对本发明的内容进行了具体的说明,但显然本领域的技术人员能够基于本发明的基本技术思想以及教导,采用各种变形方式。
[0186]
例如,能够设为由1个控制装置实施车辆10的目标轨迹的制作、和用于使车辆10的实际轨迹追随目标轨迹的控制指令的制作的系统。
[0187]
此外,车辆运动控制装置500中的横向加速度指令yd2c的运算处理不限于利用了模型预测控制的处理,能够设为不利用模型预测控制的处理。
[0188]
此外,左右偏差δy能够设为例如前方注视点上的左右偏差,或能够将车辆10的左右方向上的从车辆10到目标轨迹为止的距离设为左右偏差δy,并不限于图2所示的左右偏差δy的确定。
[0189]
标号说明
[0190]
10
…
车辆、100
…
车辆控制系统、200
…
车辆状态检测装置、300
…
外界识别装置、
400
…
自动驾驶控制装置(第1控制装置)、500
…
车辆运动控制装置(第2控制装置、车辆控制装置)、600
…
电子控制动力转向装置(转向装置)、602
…
转向控制单元(致动器控制装置)、700
…
esc单元。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
