技术特征:
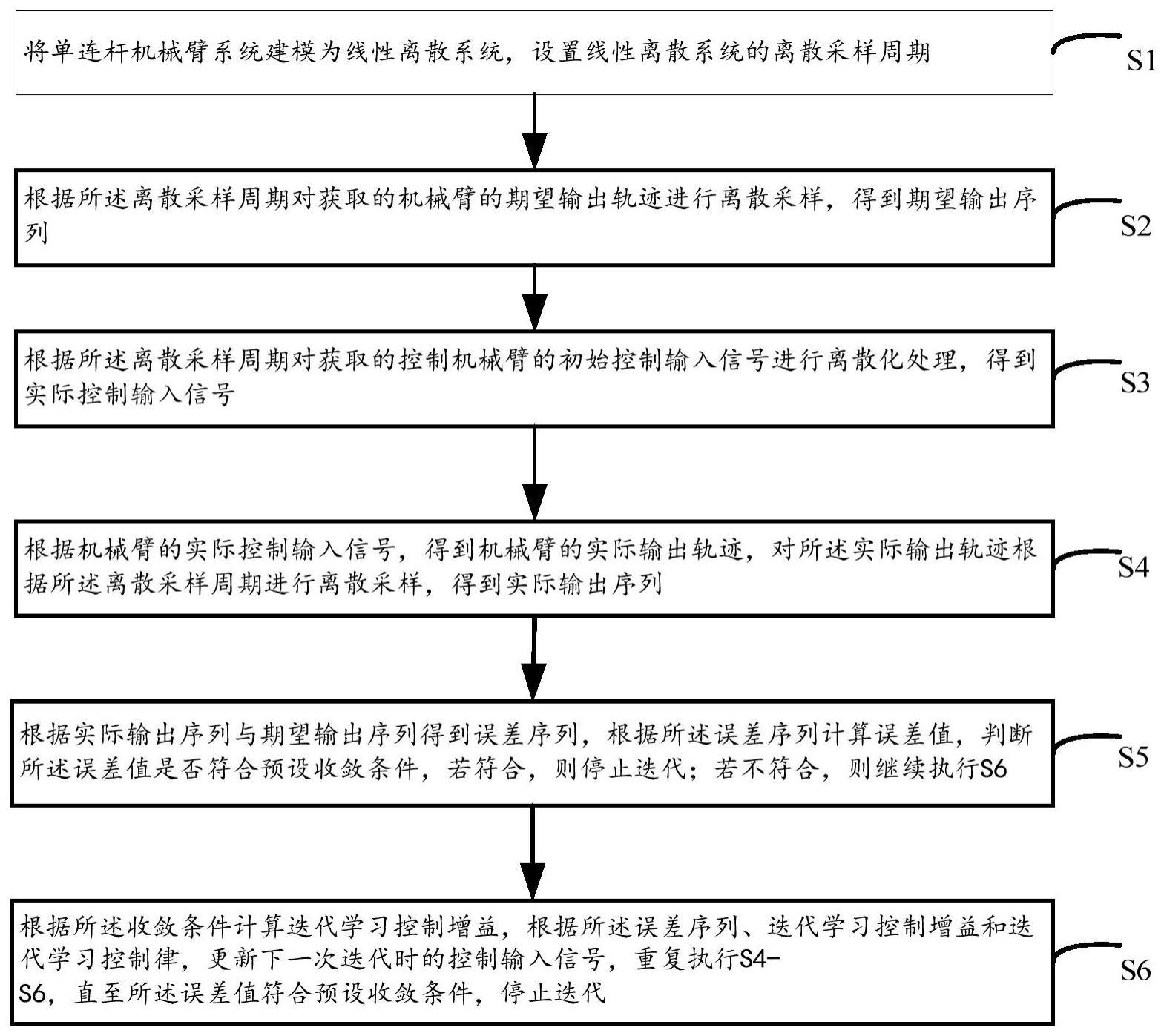
1.一种单连杆机械臂系统的迭代学习控制方法,其特征在于,包括:s1.将单连杆机械臂系统建模为线性离散系统,设置线性离散系统的离散采样周期;s2.根据所述离散采样周期对获取的机械臂的期望输出轨迹进行离散采样,得到期望输出序列;s3.根据所述离散采样周期对获取的控制机械臂的初始控制输入信号进行离散化处理,得到实际控制输入信号;s4.根据机械臂的实际控制输入信号,得到机械臂的实际输出轨迹,对所述实际输出轨迹根据所述离散采样周期进行离散采样,得到实际输出序列;s5.根据实际输出序列与期望输出序列得到误差序列,根据所述误差序列计算误差值,判断所述误差值是否符合预设收敛条件,若符合,则停止迭代;若不符合,则继续执行s6;s6.根据所述收敛条件计算迭代学习控制增益,根据所述误差序列、迭代学习控制增益和迭代学习控制律,更新下一次迭代时的控制输入信号,重复执行s4-s6,直至所述误差值符合预设收敛条件,停止迭代。2.根据权利要求1所述的方法,其特征在于,单连杆机械臂系统模型表示为:ξ
i
=(m 2m)gl[θ
i-sin(θ
i
)]/2j;j=ml2 (1/3)ml2;其中,表示的是机械臂的加速度,表示的是机械臂的速度,θ
i
表示的是机械臂的角位移,ξ
i
表示的是由于线性近似引起的模型失配误差,j表示的是关节的惯性矩,u
i
表示的是控制输入,m表示的是机械臂的质量,m表示的是机械臂的尖端载荷,l表示的是机械臂的长度,f表示的是阻尼系数,g表示的是重力加速度。3.根据权利要求2所述的方法,其特征在于,所述将单连杆机械臂系统建模为线性离散系统具体为:将所述单连杆机械臂系统建模为由状态方程和输出方程组成的非线性连续的线性离散系统,可用如下式子表示:其中:其中:其中:式中,l表示的是迭代次数。4.根据权利要求1所述的方法,其特征在于,步骤s2所述方法具体为:设置非线性连续的单连杆机械臂系统的采样周期t,采样后的离散序列为对应的离散时间序列为5.根据权利要求1所述的方法,其特征在于,所述机械臂的期望输出轨迹y
d,l
(t)的运行
区间为实际的输出轨迹y
i,l
(t)的运行区间为[0,n
l
];n
l
在每一次迭代时随机变化,且6.根据权利要求5所述的方法,其特征在于,所述根据实际输出序列与期望输出序列得到误差序列具体为:构造修正的实际输出轨迹序列函数,如下所示:根据修正后的实际输出轨迹序列和迭代变化的期望轨迹序列y
d,l
(k),得到修正后的跟踪误差序列:7.根据权利要求1所述的方法,其特征在于,所述收敛条件具体如下所示:‖i-c(k 1)b(k)l(k 1)‖≤γ<1;其中,l(k 1)为迭代学习控制增益。8.根据权利要求1所述的方法,其特征在于,所述迭代学习控制律根据所述跟踪误差序列和迭代学习控制增益l(k 1)进行计算,具体如下:9.一种电子设备,其特征在于,包括:处理器;以及被安排成存储计算机可执行指令的存储器,所述计算机可执行指令在被执行时使所述处理器实现如权利要求1至8任一所述的单连杆机械臂的迭代学习控制方法的步骤。10.一种存储介质,其特征在于,用于存储计算机可执行指令,所述计算机可执行指令在被执行时实现如权利要求1至8任一所述的单连杆机械臂的迭代学习控制方法的步骤。
技术总结
本说明书实施例提供了一种单连杆机械臂系统的迭代学习控制方法、设备及介质,其中,方法包括:对单连杆机械臂系统建模,设置离散采样周期;对机械臂的期望输出轨迹进行离散采样,得到期望输出序列;对初始控制输入信号进行离散化处理,得到实际控制输入信号,进而得到机械臂的实际输出轨迹,根据离散采样周期进行离散采样得到实际输出序列;根据实际输出序列与期望输出序列得到误差序列计算误差值,通过判断误差值是否符合预设收敛条件,若不符合,则计算迭代学习控制增益,根据误差序列、迭代学习控制增益和迭代学习控制律更新下次迭代的控制输入信号,直至误差值符合预设收敛条件时,停止迭代。停止迭代。停止迭代。
技术研发人员:韦蕴珊 鲍旭俊 尚文利 赵志甲
受保护的技术使用者:广州大学
技术研发日:2023.08.23
技术公布日:2023/10/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。