1.本发明涉及磁芯加工技术领域,具体而言,涉及一种震动盘工位的磁芯分拣组装装置。
背景技术:
2.磁芯是指由各种氧化铁混合物组成的一种烧结磁性金属氧化物。例如,锰-锌铁氧体和镍-锌铁氧体是典型的磁芯体材料。锰-锌铁氧体具有高磁导率和高磁通密度的特点,且具有较低损耗的特性。镍-锌铁氧体具有极高的阻抗率、不到几百的低磁导率等特性。磁芯由上磁芯、骨架与下磁芯三者通过胶水粘胶形成,但是这种组装方式主要采用人工手动的方式进行组装,但是通过人工手动的方式组装,不仅使得磁芯的组装效率低下,同时也让磁芯的组装成本过高,因此我们提出一种震动盘工位的磁芯分拣组装装置,来解决上述问题。
技术实现要素:
3.针对现有技术的不足,本发明提供了一种震动盘工位的磁芯分拣组装装置,解决了通过人工手动的方式组装,不仅使得磁芯的组装效率低下,同时也让磁芯的组装成本过高的问题。
4.为实现上述目的,本发明采取的技术方案为:
5.一种震动盘工位的磁芯分拣组装装置,包括工作台,所述工作台的上端分别安装有上料机构与组装机构;
6.所述上料机构包括有料仓与第一固定块,所述料仓与第一固定块分别安装在工作台的上表面两端,所述工作台的上表面后端安装有暂存箱,所述暂存箱与料仓之间上下重合,所述暂存箱靠近第一固定块的一端贯穿安装有运输架,所述第一固定块的内部安装有第一运输带;
7.所述组装机构包括有电动滑轨,所述电动滑轨安装在工作台的上表面,且电动滑轨位于运输架和第一固定块的后端,所述工作台的上表面固定安装有第二固定块,所述第二固定块位于运输架和第一固定块之间;
8.所述电动滑轨的前端安装有滑块,所述滑块与第二固定块之间上下平行,所述滑块的正表面两端分别安装有真空吸盘,且真空吸盘与运输架、第一固定块和第二固定块之间上下重合;
9.所述第二固定块的外侧安装有支撑架,所述支撑架的内部上端安装有定位压具,所述定位压具和第二固定块之间上下平行。
10.作为优选,所述料仓的内部下端贯穿设有下料槽,所述下料槽与暂存箱之间上下重合,所述暂存箱的内部下端活动安装有震动盘,所述震动盘的下端与第一电机的输出端相连接,所述第一电机安装在暂存箱的内部下端。
11.作为优选,所述料仓的内部侧面固定安装有引导架,所述引导架的下端与震动盘
之间相贴合,所述引导架的上端与运输架之间固定连接,所述运输架贯穿安装在暂存箱的外侧。
12.作为优选,所述运输架靠近引导架一端的内部活动安装有第一推板,所述第一推板靠近引导架的一侧设为斜面,所述第一推板的下端固定安装有引导块,所述引导块分别活动贯穿安装在凹槽的内部,所述凹槽贯穿设于运输架的内部下端。
13.作为优选,所述暂存箱的上表面且靠近运输架的两端分别固定安装有固定板,且固定板之间相对平行,所述固定板之间活动安装有第二固定杆,所述第二固定杆的杆身外侧活动贯穿安装有连接块,所述连接块的下端活动贯穿安装在第一固定杆的杆身外侧,所述第一固定杆固定安装在第一推板的内部。
14.作为优选,所述固定板的内部分别活动安装有活动块,所述活动块互相远离的一侧分别固定安装有转轴,所述转轴分别活动贯穿安装在固定板的内部,所述转轴的一端与第二电机之间互相连接,所述第二电机安装在暂存箱的上端,所述第二固定杆固定安装在活动块向对面的一端。
15.作为优选,所述电动滑轨安装在支撑块的上端,所述支撑块固定安装在工作台的上端,所述电动滑轨的上端活动安装有滑块,所述滑块的正表面两端分别安装有第一气缸,所述第一气缸的下端分别安装有真空吸盘。
16.作为优选,第二固定块的上端设有运输槽,所述运输槽与真空吸盘之间上下重合。
17.作为优选,所述运输槽的内部活动安装有第二推板,所述第二推板的一侧与第二气缸的输出端相连接,所述第二气缸安装在工作台的上端。
18.作为优选,所述定位压具与运输槽之间上下平行,所述工作台的上表面固定安装有第三固定块,所述第三固定块与第二固定块之间互相连接,所述第三固定块的内部活动安装有第二运输带,所述第二运输带与运输槽之间互相平行。
19.1、本发明中使用者将原料倒入料仓的内部,让其沿着下料槽落入暂存箱的内部,然后通过震动盘对原料进行分料,然后分料完成后让原料可以沿着引导架进入运输架的内部,然后点胶原料会通过第一运输带运输进行运输,在原料和点胶原料运输完成后,由滑块与真空吸盘的配合,分别将原料与点胶原料运输至运输槽的内部进行初步校准贴合,然后在原料与点胶原料贴合后,第二气缸会通过第二推板对其进行推动,让原料移动至定位压具的下端,由定位压具来对原料进行挤压装配,然后在装配完成后即可通过第二运输带进行传输下料,更加的简单快捷。
20.2、本发明中在原料移动至引导架与运输架之间后,第二电机则会通过转轴与第二固定杆进行旋转,然后第二固定杆通过第一固定杆与连接块带动第一推板进行往复移动,从而让原料在移动到第一推板的前端后,就可以通过第一推板的移动进入运输架的内部,从而辅助原料进行移动,即可提高原料的移动速度,同时也便于控制每个原料之间的移动间隔,方便真空吸盘对原料进行吸附移动。
附图说明
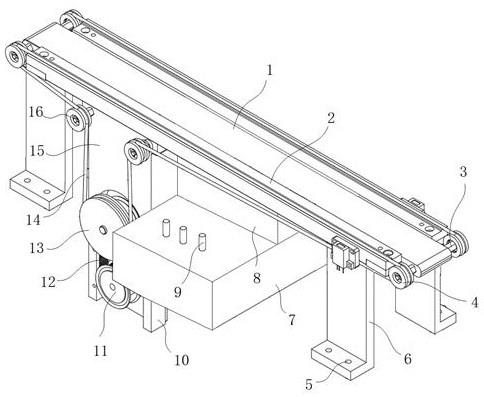
21.图1是本发明的三维立体结构示意图;
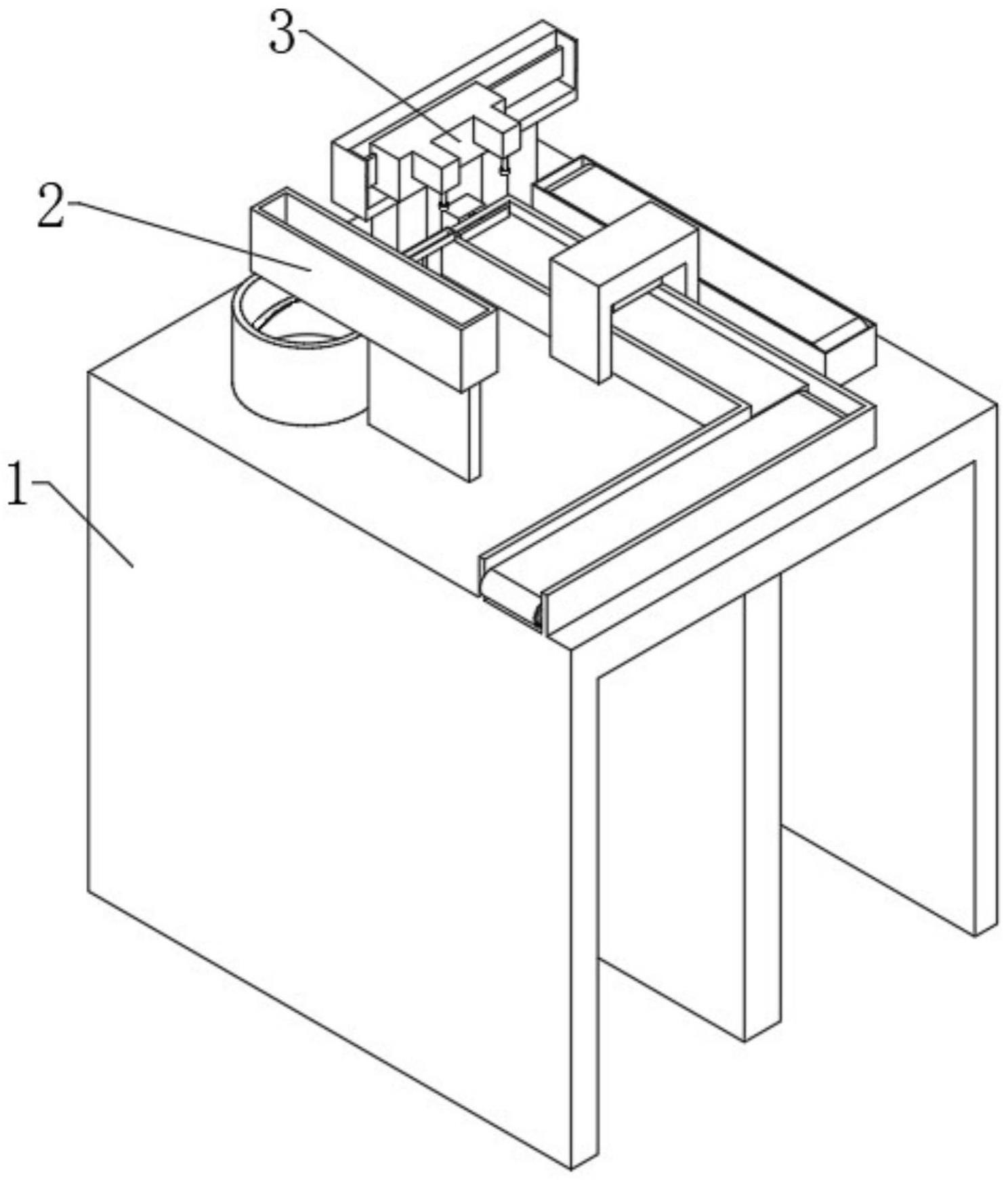
22.图2是本发明的正视结构示意图;
23.图3是本发明的侧视结构示意图;
24.图4是图2中a-a处的剖面结构立体示意图;
25.图5是图2中b-b处的剖面结构立体示意图;
26.图6是图3中c-c处的剖面结构立体示意图;
27.图7是图3中d处的放大立体结构示意图;
28.图8是图6中e处的放大立体结构示意图。
29.图中:1、工作台;2、上料机构;201、料仓;202、下料槽;203、暂存箱;204、引导架;205、震动盘;206、第一电机;207、运输架;208、凹槽;209、第一推板;210、引导块;211、第一固定杆;212、连接块;213、斜面;214、第二固定杆;215、活动块;216、第二电机;217、转轴;218、第一固定块;219、第一运输带;220、固定板;3、组装机构;301、支撑块;302、电动滑轨;303、滑块;304、第一气缸;305、第二固定块;306、运输槽;307、第二推板;308、第二气缸;309、支撑架;310、定位压具;311、第三固定块;312、第二运输带。
具体实施方式
30.下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.如图1到图8所示,一种震动盘工位的磁芯分拣组装装置,包括工作台1,工作台1的上端分别安装有上料机构2与组装机构3;
32.上料机构2包括有料仓201与第一固定块218,料仓201与第一固定块218分别安装在工作台1的上表面两端,工作台1的上表面后端安装有暂存箱203,暂存箱203与料仓201之间上下重合,暂存箱203靠近第一固定块218的一端贯穿安装有运输架207,第一固定块218的内部安装有第一运输带219;
33.组装机构3包括有电动滑轨302,电动滑轨302安装在工作台1的上表面,且电动滑轨302位于运输架207和第一固定块218的后端,工作台1的上表面固定安装有第二固定块305,第二固定块305位于运输架207和第一固定块218之间;
34.电动滑轨302的前端安装有滑块303,滑块303与第二固定块305之间上下平行,滑块303的正表面两端分别安装有真空吸盘,且真空吸盘与运输架207、第一固定块218和第二固定块305之间上下重合;
35.第二固定块305的外侧安装有支撑架309,支撑架309的内部上端安装有定位压具310,定位压具310和第二固定块305之间上下平行。
36.如图2与图5到图8所示,其中,料仓201的内部下端贯穿设有下料槽202,下料槽202与暂存箱203之间上下重合,暂存箱203的内部下端活动安装有震动盘205,震动盘205的下端与第一电机206的输出端相连接,第一电机206安装在暂存箱203的内部下端,料仓201的内部侧面固定安装有引导架204,引导架204的下端与震动盘205之间相贴合,引导架204的上端与运输架207之间固定连接,运输架207贯穿安装在暂存箱203的外侧,运输架207靠近引导架204一端的内部活动安装有第一推板209,第一推板209靠近引导架204的一侧设为斜面213,第一推板209的下端固定安装有引导块210,引导块210分别活动贯穿安装在凹槽208的内部,凹槽208贯穿设于运输架207的内部下端,暂存箱203的上表面且靠近运输架207的
两端分别固定安装有固定板220,且固定板220之间相对平行,固定板220之间活动安装有第二固定杆214,第二固定杆214的杆身外侧活动贯穿安装有连接块212,连接块212的下端活动贯穿安装在第一固定杆211的杆身外侧,第一固定杆211固定安装在第一推板209的内部,固定板220的内部分别活动安装有活动块215,活动块215互相远离的一侧分别固定安装有转轴217,转轴217分别活动贯穿安装在固定板220的内部,转轴217的一端与第二电机216之间互相连接,第二电机216安装在暂存箱203的上端,第二固定杆214固定安装在活动块215向对面的一端。
37.使用者将原料倒入料仓201的内部,然后让原料通过下料槽202落入暂存箱203的内部,然后落入暂存箱203内部的原料则会通过震动盘205的震动与转动,从而让原料在暂存箱203的内部进行分拣工作,然后分拣完成后的原料则会通过引导架204进入运输架207的内部进行运输工作;
38.第一电机206用于控制震动盘205进行旋转,便于震动盘205带动分拣完成后的原料进入引导架204内进行移动上料;
39.然后在原料进入引导架204与运输架207之间后,第二电机216则会通过转轴217带动活动块215进行旋转,然后活动块215则会带动第二固定杆214进行转动,由第二固定杆214通过连接块212带动第一固定杆211进行移动,然后第一固定杆211则会对第一推板209进行拉动,然后第一推板209对原料进行推动上料;
40.第二固定杆214为偏心轴,从而随着第二固定杆214以转轴217为轴心进行转到时,会进行上下移动,然后随着第二固定杆214的上下移动,来通过连接块212与第一固定杆211带动第一推板209进行往复移动;
41.斜面213用于引导原料进行移动,让原料可以沿着斜面213精准的移动至第一推板209的一侧,不会产生原料与第一推板209的一侧卡住的情况;
42.在原料进行分拣运输时,使用者将点胶后的原料放入第一运输带219的上端,然后第一运输带219则可以带动点胶原料进行移动,然后在移动到指定位置后,原料、点胶原料、真空吸盘以及运输槽306之间相重合,从而便于真空吸盘对原料进行吸附运输。
43.如图2、图4与图6所示,其中,电动滑轨302安装在支撑块301的上端,支撑块301固定安装在工作台1的上端,电动滑轨302的上端活动安装有滑块303,滑块303的正表面两端分别安装有第一气缸304,第一气缸304的下端分别安装有真空吸盘,第二固定块305的上端设有运输槽306,运输槽306与真空吸盘之间上下重合,运输槽306的内部活动安装有第二推板307,第二推板307的一侧与第二气缸308的输出端相连接,第二气缸308安装在工作台1的上端,定位压具310与运输槽306之间上下平行,工作台1的上表面固定安装有第三固定块311,第三固定块311与第二固定块305之间互相连接,第三固定块311的内部活动安装有第二运输带312,第二运输带312与运输槽306之间互相平行。
44.在通过上料机构2对原料运输完成后,滑块303配合电动滑轨302进行移动,然后滑块303带动真空吸盘先向着点胶原料的方向进行移动,然后在移动完成后,这时两个真空吸盘分别位于运输槽306与点胶原料的上端,然后位于点胶原料上端的真空吸盘通过第一气缸304的带动进行下移,让真空吸盘对点胶原料进行吸附;
45.然后在点胶原料吸附完成后,滑块303通过电动滑轨302在向着暂存箱203的方向进行移动,然后在移动完成后,两个真空吸盘分别位于运输架207与运输槽306的上端,然后
两个第一气缸304分别控制真空吸盘进行移动,让位于运输架207上的真空吸盘对原料进行吸附,而位于运输槽306上的真空吸盘则将点胶原料放入运输槽306的内部;
46.然后在原料吸附完成后,滑块303再次相反方向进行移动,让原料位于点胶原料上端,而另一个真空吸盘则回到第一运输带219的上端,然后真空吸盘分别通过第一气缸304的推动进行下移,让其中一个真空吸盘控制原料贴合至点胶原料的上端,进行初步组装,而另一个真空吸盘则对第一运输带219上的点胶原料进行吸附,然后重复上述步骤即可循环对原料进行上料工作;
47.然后初步组装完成后的原料会通过第二气缸308与第二推板307的推动进行移动,让原料进入支撑架309的下端,然后定位压具310来对原料进行下压组装,完成原料的组装工作,然后在原料组装完成后,即可移动至第二运输带312的上端,由第二运输带312控制原料进行下料工作,更加的简单便捷。
48.该一种震动盘工位的磁芯分拣组装装置的工作原理:
49.使用时,首先使用者将原料倒入料仓201的内部,然后让原料通过下料槽202落入暂存箱203的内部,然后落入暂存箱203内部的原料则会通过震动盘205的震动与转动,从而让原料在暂存箱203的内部进行分拣工作,然后分拣完成后的原料则会通过引导架204进入运输架207的内部进行运输工作;
50.然后在原料进入引导架204与运输架207之间后,第二电机216则会通过转轴217带动活动块215进行旋转,然后活动块215则会带动第二固定杆214进行转动,由第二固定杆214通过连接块212带动第一固定杆211进行移动,然后第一固定杆211则会对第一推板209进行拉动,然后第一推板209对原料进行推动上料;
51.在原料进行分拣运输时,使用者将点胶后的原料放入第一运输带219的上端,然后第一运输带219则可以带动点胶原料进行移动,然后在移动到指定位置后,原料、点胶原料、真空吸盘以及运输槽306之间相重合;
52.然后滑块303配合电动滑轨302进行移动,然后滑块303带动真空吸盘先向着点胶原料的方向进行移动,然后在移动完成后,这时两个真空吸盘分别位于运输槽306与点胶原料的上端,然后位于点胶原料上端的真空吸盘通过第一气缸304的带动进行下移,让真空吸盘对点胶原料进行吸附;
53.然后在点胶原料吸附完成后,滑块303通过电动滑轨302在向着暂存箱203的方向进行移动,然后在移动完成后,两个真空吸盘分别位于运输架207与运输槽306的上端,然后两个第一气缸304分别控制真空吸盘进行移动,让位于运输架207上的真空吸盘对原料进行吸附,而位于运输槽306上的真空吸盘则将点胶原料放入运输槽306的内部;
54.然后在原料吸附完成后,滑块303再次相反方向进行移动,让原料位于点胶原料上端,而另一个真空吸盘则回到第一运输带219的上端,然后真空吸盘分别通过第一气缸304的推动进行下移,让其中一个真空吸盘控制原料贴合至点胶原料的上端,进行初步组装,而另一个真空吸盘则对第一运输带219上的点胶原料进行吸附,然后重复上述步骤即可循环对原料进行上料工作;
55.然后初步组装完成后的原料会通过第二气缸308与第二推板307的推动进行移动,让原料进入支撑架309的下端,然后定位压具310来对原料进行下压组装,完成原料的组装工作,然后在原料组装完成后,即可移动至第二运输带312的上端,由第二运输带312控制原
料进行下料工作。
56.显然,本发明的上述实施例仅仅是为清楚地说明本发明所做的举例,而并非是对本发明实施方式的限定,对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动,这里无法对所有的实施方式予以穷举,凡是属于本发明的技术方案所引申出的显而易见的变化或变动仍处于本发明的保护范围之列。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。