1.本公开涉及运送机器人,特别涉及用于运送半导体晶片等板状工件的运送机器人。
背景技术:
2.过去,运送机器人例如在半导体工艺中使用。具体地,运送机器人用于从盒中将晶片取出并运送到处理室,或者,将处理结束从晶片从处理室取出运送到下一工序。一般,这种运送机器人具备在上表面保持晶片的手(hand),构成为在将晶片载置于手的状态下,能将该晶片从运送源移送到运送目的地。
3.作为一例,在将晶片运送到处理室的情况下,晶片需要在运送目的地正确地定位在旋转方向(θ方向)和平面方向(x-y方向)的各基准位置。为此,使用进行校准操作的装置(称作“校准器”)。
4.现有的校准器例如如专利文献1的图3所示那样,具备能载置晶片的旋转载台。此外,该校准器具备用于检测载置于旋转载台的晶片的距基准位置的x-y方向的偏离量和θ方向的偏离量的传感器。晶片具有圆形的外周,并且具有设于该圆形外周的缺口(或定向平面等)。由此,例如,通过使晶片旋转的同时连续检测晶片的外周,能检测载置于旋转载台的晶片的中心的x-y方向的偏离量。此外,通过使晶片旋转的同时检测缺口,能检测载置于旋转载台的晶片的θ方向的偏离量。
5.θ方向的偏离,能通过考虑如上述那样检测到的偏离量使旋转载台向给定方向旋转来消除。在用手将晶片从旋转载台拿起后,依据上述那样检测到的偏离量,运送机器人将该手的位置在x-y方向上进行修正并移送到运送目的地,由此能消除x-y方向的偏离。
6.专利文献1记载的现有的校准器在以下的点上还有改善的余地。即,该校准器由于与运送机器人独立,因此,关系到包含运送机器人和校准器的运送装置的成本提升,并且,为了运送装置的设置而需要大的地板面积。此外,运送机器人和校准器间的晶片的交接会花费时间,相应地吞吐会延迟从而工艺整体的处理效率变差。
7.现有技术文献
8.专利文献
9.专利文献1:jp特开2015-195328号公开
技术实现要素:
10.本公开将提供比过去更加改良的运送机器人作为一个课题。特别是,鉴于上述的事情,一个课题在于,提供能更加缩短校准操作所需的时间的运送机器人。
11.为了解决上述课题,根据本公开,例如能采用如下的技术手段。
12.由本公开的一个侧面提供的运送机器人具备:水平臂,其能绕着与通过可动机构移送的支承底座垂直的第1轴(回旋轴)回旋;和手,其能在所述水平臂的上方相对于该水平臂绕着与所述第1轴平行的第2轴(转动轴)转动,能在上表面保持板状工件,在所述水平臂
设有旋转载台,其能绕着与所述第1轴平行的(或一致的)第3轴(旋转轴)旋转,并且能在该第3轴的轴方向上升降,能在上表面保持所述板状工件,所述手构成为与所述板状工件的中心对应的保持中心的转动轨迹在俯视观察下通过所述第3轴,使所述旋转载台利用为了使所述水平臂回旋而设于该水平臂的电动机的输出来旋转。
13.在优选的实施方式中,通过在设于用于对该旋转载台传递旋转动力的旋转载台用轴的滑轮、设于所述电动机的输出轴的滑轮和设于所述第1轴的滑轮共通地绕挂皮带,使所述旋转载台利用所述电动机的输出来旋转。
14.在优选的实施方式中,在设于所述第1轴的所述滑轮与所述支承底座之间设置减速机。
15.在优选的实施方式中,所述减速机的减速比例如是1/160~1/50。
16.在优选的实施方式中,在所述水平臂的内部设置所述电动机、设于所述电动机的所述输出轴的所述滑轮、所述旋转载台用轴、设于所述旋转载台用轴的所述滑轮、设于所述第1轴的所述滑轮、和所述皮带。
17.发明的效果
18.在上述结构中,形成为手的保持中心的旋转轨迹在俯视观察下通过上述第3轴。因此,使手以该第2轴为中心转动,来使保持中心位于旋转载台的第3轴上。
19.如此地移送到旋转载台的上方的手上的板状工件,通过使旋转载台上升而被移载到该旋转载台上。通过在该状态下使旋转载台旋转并用给定的传感器连续检测板状工件的外周,能检测从手移载到旋转载台的时间点的板状工件的中心的x-y方向的偏离量。在板状工件为半导体晶片的情况下,在其中,在外周形成缺口或定向平面,通过同时检测缺口或定向平面,能检测从手移载到旋转载台的时间点的板状工件的θ方向的偏离量。θ方向的偏离能通过考量上述那样检测到偏离量使旋转载台在给定方向上旋转来消除。如此地消除了θ方向的偏离的板状工件通过使旋转载台下降而被移载到手上,板状工件的x-y方向的偏离通过运送机器人依据上述那样检测到的偏离量将手在x-y方向上修正并移送到运送目的地来消除。
20.如此地,根据上述结构的运送机器人,由于不设置另外的校准器就能进行校准操作,因此,能谋求运送装置整体的小型化和成本降低。此外,由于能在短时间内进行手与旋转载台间的板状工件的交换,因此,能缩短校准操作所需的时间,能使工艺整体的处理效率提升。
21.本公开的其他特征以及优点,从参考附图在以下进行的详细的说明变得更加明确。
附图说明
22.图1是本公开的一实施方式所涉及的运送机器人的整体立视图。
23.图2是水平臂的俯视图。
24.图3是水平臂的纵截面图,相当于沿着图2的iii-iii线的截面图。
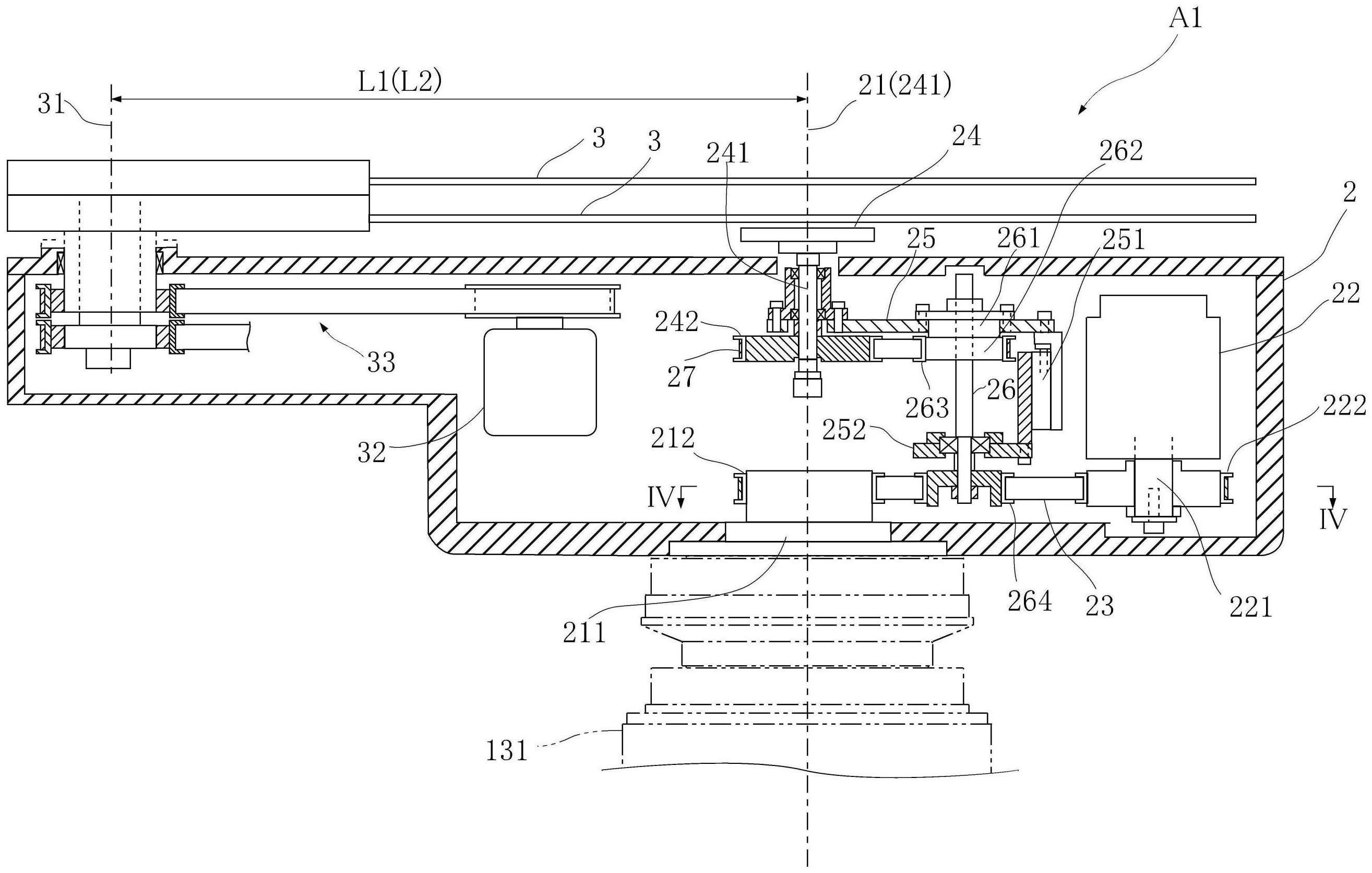
25.图4是沿着图3的iv-iv线的截面图。
26.图5是表示工作状态的图,相当于沿着图2的iii-iii线的截面图。
27.图6是表示工作状态的图,是表示俯视观察下的水平臂的图。
28.图7是表示工作状态的图,相当于沿着图2的iii-iii线的截面图。
29.附图标记的说明
30.a1:运送机器人、w:晶片(板状工件)、wo:(晶片的)中心、1:可动机构(机器人)、131:支承底座、2:水平臂、21:回旋轴(第1轴)、211:减速机、212:滑轮、22:回旋用电动机、221:输出轴、222:滑轮、23:无端皮带、24:旋转载台、241:旋转轴(第3轴)、264:滑轮、27:无端皮带、3:手、31:转动轴(第2轴)
具体实施方式
31.以下参考附图来具体说明本公开的优选的实施方式。
32.图1概略地表示本公开的一实施方式所涉及的运送机器人a1的整体结构。另外,该运送机器人a1构成为用于运送作为板状工件的半导体晶片w。
33.运送机器人a1具备可动机构(机器人)1、水平臂2和手3。可动机构1具备:能绕着水平的第1轴11转动的第1臂111;能在第1臂111的前端绕着水平的第2轴12转动的第2臂121;和能在第2臂121的前端绕着水平的第3轴13转动的支承底座131。可动机构1能在与第1、第2以及第3轴11、12、13正交的垂直面内使支承底座131移送到第1臂111和第2臂121的长度所容许的区域的任意的位置。水平臂2被支承底座131能回旋地支承。支承底座131被姿态控,以使得水平臂2的回旋轴21与垂直方向平行(或实质平行)。
34.水平臂2相对于支承底座131能绕着回旋轴21回旋地被支承。水平臂2的回旋驱动通过配置于水平臂2的内部的回旋用电动机22来进行。如图3以及图4所示那样,回旋用电动机22的输出轴221,通过在其设置的滑轮222与经由减速机211设于回旋轴21上的滑轮212之间绕挂无端皮带23,来与支承底座131协作。减速机211例如使用harmonic drive(注册商标)等的具有高减速比的减速机。该减速机的减速比例如是1/160~1/50。另外,在本实施方式中,回旋用电动机22优选使用不附属减速机能的电动机。此外,回旋轴21上的滑轮212相对于设于回旋用电动机22的输出轴221的滑轮222的比并没有限定,例如是1∶1。
35.手3如图2所表征的那样,具有两股叉状的平面形状,具有保持于上表面的晶片w(图5)的中心应当处于的保持中心o1。在图中所示的实施方式中,上下重叠的2个手3设置成能绕着垂直的转动轴31转动。各手3通过设于水平臂2的内部的电动机32,来经由皮带传动机构33等被个别地转动控制。在本实施方式中,该手3使用能通过真空压吸附来保持晶片w的手。另外,该手w可以使用能通过夹紧机构夹紧保持晶片w的周缘的手。
36.在本实施方式中,具有旋转轴241且构成为能升降的旋转载台24设于水平臂2。以下说明用于此的具体的结构例。
37.如图3所示那样,在水平臂2的内部设有能通过空气气缸251等直线运动致动器而升降的支承板25,在该支承板25能旋转地支承具有与回旋轴21平行或相同轴线的旋转轴241。该旋转轴241与手3的关系被设为从手3的转动轴31到保持中心o1的距离l1、和手3的转动轴31与旋转载台24的旋转轴241之间的距离l2相等的关系(图2)。在该旋转轴21的上端设有圆形的旋转载台24。旋转载台24设定为能上下穿过手3的叉爪3a之间的空间的大小,能在上表面将晶片w例如通过吸附进行保持。在本实施方式中,旋转载台24的旋转轴241配置在与水平臂2的回旋轴21相同轴线上。
38.在设于支承板25的下方的辅助板252,能旋转地支承垂直方向上延伸的中间传动
轴26,该中间传动轴26的上端,在被支承板25贯通保持的固定器261以及附属于固定器261且能相对于该固定器261旋转的花键螺母262插通。中间传动轴25是花键轴,花键螺母262能相对于中间传动轴26在轴方向上移动且不能相对旋转。因此,不管支承板25乃至花键螺母262位于其升降行程的哪个位置,中间传动轴26的旋转都传递到花键螺母262,花键螺母262和中间传动轴26一起旋转。另外,作为能实现作为上述中间传动轴26(花键轴)、固定器261、花键螺母262的组合体的功能的市售品,能适当使用thk株式会社制的旋转滚珠花键ltr型。
39.分别在花键螺母262设置滑轮263,在旋转载台24的旋转轴241的下部设置滑轮242,在这些滑轮263、242间绕挂无端皮带27。在中间传动轴25的下端设置滑轮264,在该滑轮264共通地绕挂在设于回旋用电动机22的输出轴221的滑轮222与经由减速机211设于回旋轴21上的滑轮212之间绕挂的无端皮带23(图4)。滑轮222与滑轮264的比并没有限定,例如设为1~2∶1。由此,若驱动回旋用电动机22,则在水平臂2绕着回旋轴21回旋的同时,旋转载台24绕着旋转轴241旋转。其中,由于减速机211的减速比大,因此,即使旋转载台24旋转了1圈(360
°
),水平臂2的回旋角度也微小。
40.接下来,使用上述结构的运送机器人a1来说明进行晶片w的校准操作的情况的动作例。
41.如图5所示那样,使旋转载台24位于比手3更下位的位置,使装载从运送源接受到的晶片w的手3的保持中心o1与旋转载台24的旋转轴241在平面上一致。这时,如图6所示那样,存在晶片w的中心wo相对于旋转载台24的旋转轴241(手3的保持中心o1)在x-y方向上偏离(偏离量δ
xy
)、在θ方向上也偏离(偏离量δ
θ
)的情况。
42.接着,如图7所示那样,通过使旋转载台24上升,来将晶片w移载到该旋转载台24上。在该状态下使旋转载台24旋转,通过用给定的传感器连续检测晶片w的外周,能检测在从手3移载到旋转载台24的时间点的晶片w的中心wo的x-y方向的偏离量δ
xy
。在晶片w,由于在外周形成缺口wn或定向平面,因此,通过同时检测该缺口wn或定向平面,能检测从手3移载到旋转载台24的时间点的晶片w的θ方向的偏离量δ
θ
。θ方向的偏离如上述那样,能通过考量检测到的偏离量δ
θ
使旋转载台24在给定方向上旋转来消除。如此地,消除了θ方向的偏离的晶片w通过使旋转载台24下降而移载到手3上,通过依据上述那样检测到的偏离量δ
xy
,可动机构1乃至水平臂2将手3在x-y方向上修正并移送到运送目的地,由此能消除晶片w的x-y方向的偏离。
43.在上述结构中,利用用于使水平臂2回旋的回旋用电动机22的输出来进行旋转载台24的旋转驱动,因此,不需要设置用于旋转载台24的另外的驱动系统。
44.在上述那样使旋转载台24旋转时,水平臂2也回旋,但如上述那样,由于减速机211使用高减速比的减速机,因此,水平臂2的回旋角度微小,在校准操作中,水平臂2不会大幅回旋而与外围设备干涉,维持了装置整体的紧凑性。
45.如此地,根据上述结构的运送机器人a1,由于不设另外的校准器就能进行校准操作,因此,能谋求运送装置整体的小型化和成本降低。此外,由于能在短时间内进行手3与旋转载台24间的晶片w的交换,因此,能缩短校准操作所需的时间,能使工艺整体的处理效率提升。
46.当然,本公开并不限定于上述的实施方式,各权利要求记载的事项的意义中所含的任何变更都包括在本公开的范围中。
47.例如,在上述实施方式中,使旋转载台24的旋转轴241和水平臂2的回旋轴21一致,但不一定非要这样。使手3的转动轴31与保持中心o1之间距离l1和手3的转动轴31与旋转载台24的旋转轴241之间的距离l2相等即可。
48.此外,关于用于使利用水平臂2的回旋用电动机22的输出而旋转的旋转载台24升降的结构,也并不限定于实施方式。
49.进而,移送支承水平臂2的支承底座131的可动机构1的结构也并不限定于上述的实施方式,只要是能将支承底座131移送到垂直面内的任意的位置的结构,就可以是任意的结构。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。