1.本发明涉及空间目标定位及追踪技术领域,特别是涉及基于磁定位的颗粒运动轨迹监测系统及其定位方法。
背景技术:
2.随着科学与技术的不断发展,定位技术已经广泛应用于军事目标、机器人、医疗手术导航、虚拟实现、移动设备导航等领域。目前,磁定位方法一直是众多研究人员关注的焦点,其作用在于定位出目标点的坐标、方向、轨迹等参数信息。利用磁定位技术时,定位算法是关键,目前最常用的就是非线性优化算法。但是由于非线性优化算法需要给定待优化变量的初始值,初始值的好坏会影响最终解的质量,因此这就需要算法能容许当前优化变量的初始值和真值之间有一个较大的变化区间或者借助其他方法,给其一个较优的初始值。另一方面,作为一种启发式搜索算法,粒子群优化算法速度很快,不需要初始值,但其精度受噪声的影响很大。
3.近年来,盾构法在城市隧道的建设中得到越来越广泛的应用。然而,盾构在岩土体深部掘进过程中,由于岩土体材料的不透明性以及盾构设备本身的密封性,导致无法直接有效的观测盾构刀盘前方或者土舱内岩土颗粒的运移规律。若能通过某种定位技术掌握对盾构刀盘前方或者土舱内岩土颗粒的运移规律,则对于我们研究刀盘刀具和土体相互作用规律、刀盘刀具导流特性具有重要的现实意义。一旦我们掌握了刀盘刀具和土体相互作用规律及刀盘刀具导的流特性,这将会为盾构刀盘结构设计、刀具布置及土舱结构设计提供更好的理论依据,从而避免盾构在砂卵石地层中掘进时岩土颗粒滞排现象,降低盾构刀盘刀具的磨损,最终实现盾构安全、高效、长距离掘进。
4.综上所述,现有技术存在的问题是:现有磁定位技术中的定位算法均需要给定待优化变量的初始值,初始值的好坏会影响最终解的质量,而现有定位算法暂时还无法给定待优化变量的最优初始值。因此,就需要借助其他方法,设计出定位精度高且效率高的定位算法。
5.现有关于模型盾构掘进过程中卵石颗粒的运移规律及运动轨迹尚无相关技术对其进行有效观测及预测。
技术实现要素:
6.针对上述问题,本发明提供了一种针对模型盾构掘进过程中卵石颗粒的运移规律及运动轨迹的基于磁定位的颗粒运动轨迹监测系统及其定位方法。
7.本发明的技术方案是:本发明提供一种基于磁定位的颗粒运动轨迹监测系统,包括永磁体、信号接收装置、信号采集装置和数据处理装置,所述信号接收装置包括磁传感器和信号放大电路,用于接收永磁体发出的磁场信号并将其转变为电信号,同时对电信号进行放大处理;所述信号采集装置包括微控制器,用于负责磁传感器通道选择和队列式的数据存
储及读取;所述数据处理装置包括pc机以及软件,用于对微控制器传输的数据进行处理,以及完成相关求解算法的实现,计算分析出定位点的位置和姿态信息;同时,在显示屏的人机界面上实时显示出当前磁体位置与方向,磁体运动轨迹和3d效果图。
8.在进一步的技术方案中,所述信号接收装置和所述信号采集装置为圆柱形的磁传感器阵列,所述圆柱形的磁传感器阵列包括若干块长条形电路板,所述长条形电路板上集成有若干个间距相等的磁传感器和一个微控制器,长条形电路板上设置有电源接口与通信接口,每个磁传感器均与外部电源电连接。
9.在进一步的技术方案中,所述若干块长条形电路板包括一块主控制电路板和若干块子电路板;所述主控制电路板上集成有若干个等距的磁传感器、两个通信芯片和一个微控制器;所述子电路板上集成有若干个等距的磁传感器、一个通信芯片和一个微控制器。
10.在进一步的技术方案中,所述主控制电路板上的微控制器与其所在电路板一一对应,所述微控制器通过spi总线采集其所在长条形电路板上所有磁传感器接收到的数据,同时,通过rs485总线收集其他子电路板上磁传感器接收到的数据;所述子电路板上的微控制器与其所在电路板一一对应,所述微控制器通过spi总线采集其所在长条形电路板上所有磁传感器接收到的数据,同时,通过rs485总线将子电路板上磁传感器接收到的数据打包传输至主控制电路板;所述微控制器上设置的对应长条形电路板的识别信息是16bit位的。
11.在进一步的技术方案中,所述信号接收装置中包含信号放大电路,所述信号放大电路用于对磁传感器接收到的信号进行放大处理,信号放大电路可以通过ad620an的信号放大器实现;所述数据处理装置用于对主控制电路板上的微控制器采集到的数据进行二次曲线拟合滤波处理,并通过相关定位算法对经过滤波处理的数据进行反演计算,然后,得到所述永磁体的目标矢量坐标,根据目标矢量坐标生成永磁体的运动轨迹,最后,通过其定位结果显示部分,在显示屏的人机界面上实时显示出永磁体位置16bit位的与方向,磁体运动轨迹和3d效果图。
12.在进一步的技术方案中,所述磁传感器为三轴磁传感器,该三轴磁传感器的数量至少为所述目标永磁体的2倍。
13.一种根据基于磁定位的颗粒运动轨迹监测系统的定位方法,包括以下步骤:a、获取圆柱形的磁传感器阵列上各传感器所处的空间位置,测量目标永磁体在各传感器位置产生的磁感应强度;b、利用各传感器位置产生的磁感应强度数据以及基于磁偶极子模型所得各传感器位置的理论磁感应强度数据,定义目标永磁体的误差目标函数,所述误差目标函数由永磁体的位置和方向参数决定;c、利用粒子群优化算法寻找所述目标永磁体的位置和方向参数的近似解,使所述误差目标函数最小,并将此近似解作为非线性优化算法的初始种子值进行进一步优化求解;d、利用非线性优化算法寻找所述目标永磁体的位置和方向参数,使所述误差目标函数最小,此时,所述目标永磁体的位置和方向参数即为目标永磁体的定位数据。
14.在进一步的技术方案中,所述步骤a中,磁感应强度为目标永磁体在各传感器所在
位置磁场产生的三个正交磁感应强度分量;在进一步的技术方案中,所述步骤b中,基于磁偶极子模型所得某一磁传感器所在位置的理论磁感应强度的矢量表达式为:;其中:为永磁体中心点指向某一被测点的向量,为目标永磁体的磁矩方向,为目标永磁体的磁体常数,并且有:;将基于磁偶极子模型所得永磁体在场点处产生的理论磁感应强度表示为空间直角坐标系下的3个分量,所述步骤b和c中的误差目标函数分量计算如下:;其中:为第个磁传感器所在位置磁场的三个正交磁感应强度分量测量值,表示传感器阵列中磁传感器的数量,i表示第i个传感器误差目标函数即等于上述三个误差分量之和,具体表示如下:;其中:分别表示x、y、z方向上每个磁力计测得的磁场信号与理论值之间差值的平方和;表示x、y、z三个方向上的误差之和。
15.在进一步的技术方案中,所述非线性优化算法采用levenberg
–
marquardt算法。
16.本发明的有益效果是:1、采用本发明的监测系统,能够使磁定位系统实现高速和高精度的定位需求,使系统具有较好的实时性;解决盾构在岩土体深部掘进过程中,由于岩土体材料的不透明性以及盾构设备自身的密封性造成岩土体颗粒运移姿态不可见性,为颗粒运移规律的研究提供新的技术手段。
17.2、采用本发明的定位方法,是以磁偶极子模型为基础,结合粒子群优化算法与非线性优化算法作为定位算法,使得定位和定向结果更加准确和稳定。即先利用粒子群优化算法找到永磁体的初始位置和方向参数的近似解,然后将该近似解作为非线性优化算法的初始种子值进行进一步优化求解,并将非线性算法的求解结果作为该定位算法的最终结果。由于通过粒子群优化算法得到的初始参数非常接近目标永磁体实际所处的位置和方向
参数,因此再结合非线性算法可以准确的得到运动过程中目标永磁体的实时位姿参数。
附图说明
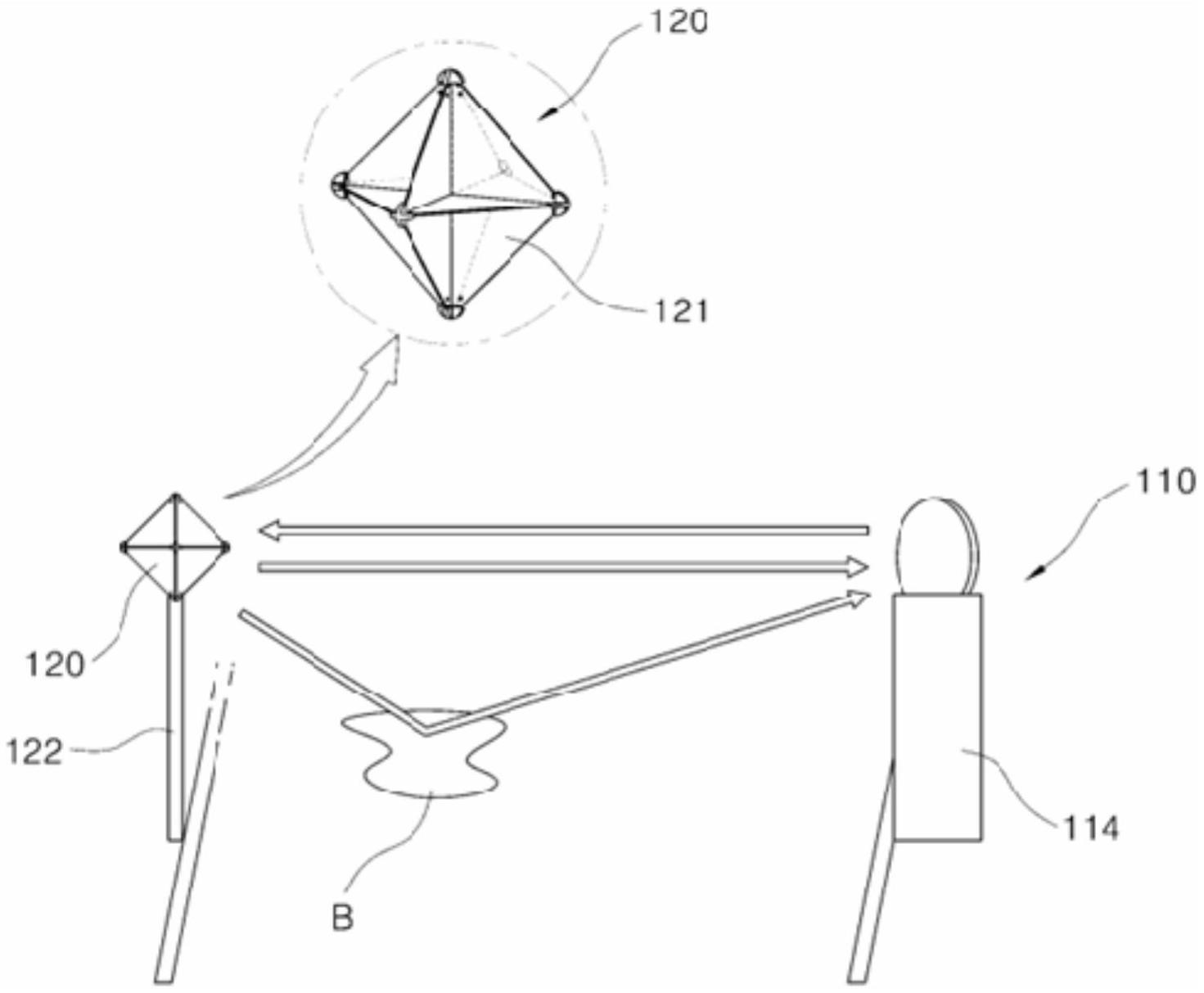
18.图1是本实施例1中单一目标永磁体定位示意图;图2是本实施例1中单一目标永磁体定位系统流程图;图3是本实施例1中单一目标永磁体定位方法流程图;图4是本实施例1中定位系统的示意立体图;图5是本实施例1中长条形主控制电路板结构示意图;图6是本实施例1中长条形子电路板结构示意图。
具体实施方式
19.下面结合附图对本发明的实施例作进一步说明。
20.实施例1:
21.如图1-6所示,本发明提供一种基于磁定位的颗粒运动轨迹监测系统,包括永磁体、信号接收装置、信号采集装置和数据处理装置,所述信号接收装置包括磁传感器和信号放大电路,用于接收永磁体发出的磁场信号并将其转变为电信号,同时对电信号进行放大处理;所述信号采集装置包括微控制器,用于负责磁传感器通道选择和队列式的数据存储及读取;所述数据处理装置包括pc机以及软件,用于对微控制器传输的数据进行处理,以及完成相关求解算法的实现,计算分析出定位点的位置和姿态信息;同时,在显示屏的人机界面上实时显示出当前磁体位置与方向,磁体运动轨迹和3d效果图。
22.在另外一个实施例中,所述信号接收装置和所述信号采集装置为圆柱形的磁传感器阵列,所述圆柱形的磁传感器阵列包括若干块长条形电路板,所述长条形电路板上集成有若干个间距相等的磁传感器和一个微控制器,长条形电路板上设置有电源接口与通信接口,每个磁传感器均与外部电源电连接。
23.在另外一个实施例中,所述若干块长条形电路板包括一块主控制电路板和若干块子电路板;所述主控制电路板上集成有若干个等距的磁传感器、两个通信芯片和一个微控制器;所述子电路板上集成有若干个等距的磁传感器、一个通信芯片和一个微控制器。
24.在另外一个实施例中,所述主控制电路板上的微控制器与其所在电路板一一对应,所述微控制器通过spi总线采集其所在长条形电路板上所有磁传感器接收到的数据,同时,通过rs485总线收集其他子电路板上磁传感器接收到的数据;所述子电路板上的微控制器与其所在电路板一一对应,所述微控制器通过spi总线采集其所在长条形电路板上所有磁传感器接收到的数据,同时,通过rs485总线将子电路板上磁传感器接收到的数据打包传输至主控制电路板;所述微控制器上设置的对应长条形电路板的识别信息是16bit位的。
25.在另外一个实施例中,所述信号接收装置中包含信号放大电路,所述信号放大电路用于对磁传感器接收到的信号进行放大处理,信号放大电路可以通过ad620an的信号放大器实现;所述数据处理装置用于对主控制电路板上的微控制器采集到的数据进行二次曲
线拟合滤波处理,并通过相关定位算法对经过滤波处理的数据进行反演计算,然后,得到所述永磁体的目标矢量坐标,根据目标矢量坐标生成永磁体的运动轨迹,最后,通过其定位结果显示部分,在显示屏的人机界面上实时显示出永磁体位置与方向,磁体运动轨迹和3d效果图。
26.在另外一个实施例中,所述磁传感器为三轴磁传感器,该三轴磁传感器的数量至少为所述目标永磁体的2倍。
27.具体的是:在附图5和附图6中,为了便于说明,对条形电路板上主要元器件的尺寸进行了放大处理。
28.如图2所示,本发明提供一种磁定位系统,用于探测永磁体的空间位姿(位置和方向),该定位系统包括:永磁体、信号接收模块、信号采集模块、数据处理模块;永磁体位于磁传感器阵列的检测区域中,信号接收模块主要包括磁传感器阵列和信号放大电路,其功能是接收永磁体发出的磁场信号并将其转变为电信号,同时对电信号进行适当放大处理;磁传感器阵列所包含的传感器数量需满足等于或多于磁性目标2倍,磁传感器为三轴tmr2305m传感器;信号采集装置主要为微控制器,微控制器负责磁传感器通道选择、模拟信号和队列式的数据存储及读取;数据处理模块主要包括pc机以及相关软件,其主要功能是对微控制器传输的数据进行滤波等处理,以及完成相关求解算法的实现,计算分析出定位点的位置和姿态信息;同时,在显示屏的人机界面上实时显示出当前永磁体的位置与方向,永磁体运动轨迹和3d效果图。
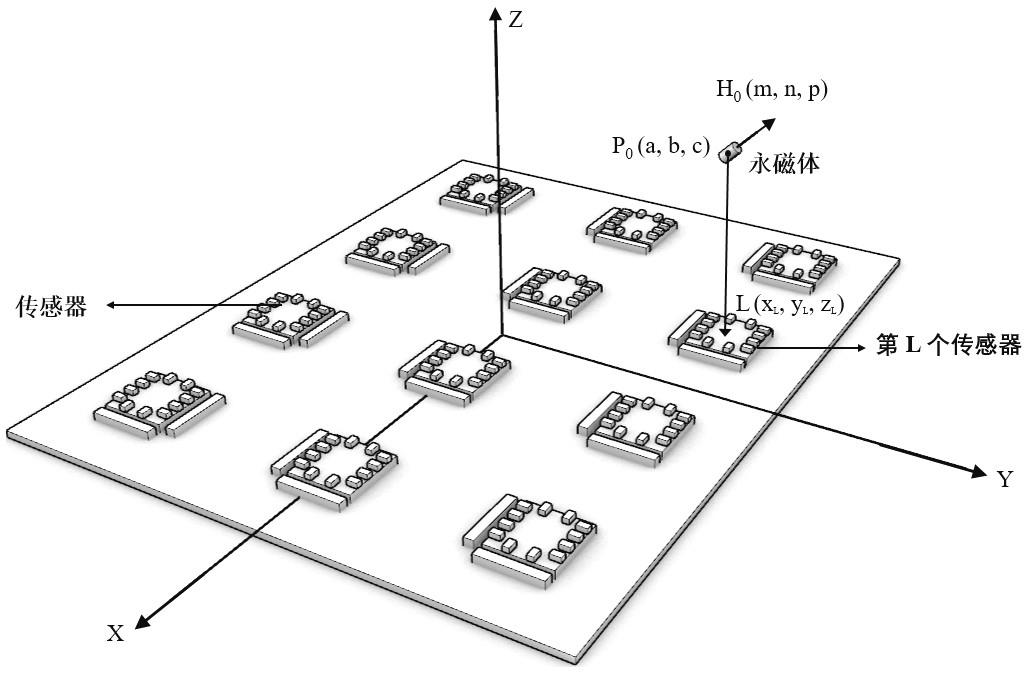
29.具体的,永磁体周围空间的磁场分布是保持不变的静态场,永磁体为沿轴均匀磁化的圆柱形磁铁,且永磁体的尺寸远小于检测点与其之间的距离,此时,永磁体可等效为图1所示的磁偶极子。图1中x-y-z为全局坐标系,为目标永磁体所处空间位置,为目标永磁体磁偶极矩方向上的单位矢量。则根据磁偶极子模型,对于空间任意一点,永磁体在点的磁感应强度计算公式如下所示:;其中:为永磁体中心点指向某一被测点的向量,为目标永磁体的磁矩方向,为目标永磁体的磁体常数,并且有:;将基于磁偶极子模型所得永磁体在场点处产生的理论磁感应强度表示为空间直角坐标系下的3个分量,如下所示:
;当在磁体周围的空间点上放置三轴磁传感器,则空间上第个三轴磁传感器点的坐标是预先可确定的,所以未知参数为磁体的位置和方向,即这六个参数为所需定位参数。由此可见,该定位问题是寻6维位姿参数的问题。如果能用2个或更多三轴磁传感器测量得到磁体周围某一空间点的磁场强度,则我们可以利用上述公式求解出这些参数,进而实现对目标永磁体的定位及定向。
30.因此,本发明采用如下方法获取多磁性目标的定位数据,如图3所示,所述方法包括以下步骤:a、获取磁传感器阵列上各传感器所处的空间位置,测量目标永磁体在所述各传感器位置产生的磁感应强度;b、利用各传感器位置产生的磁感应强度数据以及基于磁偶极子模型所得各传感器位置的理论磁感应强度数据,定义目标永磁体的误差目标函数,所述误差目标函数由永磁体的位置和方向参数决定,具体如下所示:;其中:为第个磁传感器所在位置磁场的三个正交磁感应强度分量测量值,表示传感器阵列中磁传感器的数量;误差目标函数即等于上述三个误差分量之和,具体表示如下:;其中:分别表示x、y、z方向上每个磁力计测得的磁场信号与理论值之间差值的平方和;表示x、y、z三个方向上的误差之和。
[0031] c、利用粒子群优化算法寻找所述目标永磁体的位置和方向参数的近似解,使所述误差目标函数最小,并将此近似解作为非线性优化算法的初始种子值进行进一步优化求解;
d、利用非线性优化算法寻找所述目标永磁体的位置和方向参数,使所述误差目标函数最小,此时所述目标永磁体的位置和方向参数即为目标永磁体的定位数据;如图4所示,本发明的一个很好的应用是对模型单圆盾构隧道掘进过程中刀盘前方及土舱内的土颗粒运动轨迹及状态进行可视化监测。具体的,针对圆筒状模型箱(直径400mm,高度500mm),设计图4所示定位装置,该定位装置可密贴在圆筒状模型箱外围,永磁体置于模型箱内部并与试验材料混合在一起。该定位装置由12个长条形电路板组成,电路板固定在电路板支撑板上,并与支撑板保持一定的距离,长条形电路板上集成有三轴磁传感器、微控制器以及通信芯片等元器件,电路板之间采用电连接。
[0032]
其中,长条形电路板包括1块主控制板及11块子电路板,具体如图5和图6所示。主控制电路板的作用是:
①ꢀ
收集其他子电路板上磁传感器阵列接收的数据;
②ꢀ
采集本电路板上磁传感器阵列接收的数据;
③ꢀ
通过usb虚拟接口将所有电路板上磁传感器接收的数据传输至pc端。
[0033]
当单圆盾构刀盘在外周设置有定位装置的模型箱内掘进时,模型箱内的永磁体在刀盘的扰动下开始运动,定位装置上的每个磁传感器接收永磁体发出的磁信号并将其转换为电信号,然后微控制器进行磁传感器通道选择和队列式的数据存储及读取,并将表示物体的位置和方向的信息数据通过usb接口传输给数据处理器,数据处理器再对微控制器传输的数据进行滤波等处理,并结合粒子群优化算法和非线性优化算法计算目标永磁体的位置和方向,使误差目标函数最小。计算被测目标相对参考目标的运动轨迹,滤除环境相对运动对被测目标设备的影响。分析结果合理性,并用适当的综合优化拟合算法对定位结果进行进一步滤波优化,获取更精确的定位定向结果。将新的结果储存作为下一次的计算的历史数据,依次循环。记录环境的相对运动和跟踪数据,同时,在显示屏的人机界面上实时显示出当前磁体位置与方向,磁体运动轨迹和3d效果图。
[0034]
本发明系统和装置具有以下优点:本系统采用永磁体作多目标信号源,基于磁偶极子模型,结合粒子群优化算法和非线性优化算法作为定位算法,采用这种定位策略可以降低定位误差,也可以使系统实现高速和高精度的定位需求。本系统采用模块式优化设计的磁场传感器阵列,可根据不同的精度、稳定性定位空间范围等应用要求灵活配置系统。利用本系统能够实现对模型盾构掘进过程中卵石颗粒的运移规律及运动轨迹的可视化监测,解决盾构掘进过程中由于岩土体材料的不透明性以及盾构设备本身的密封性,导致无法直接有效的观测盾构刀盘前方或者土舱内岩土颗粒的运移轨迹。
[0035]
实施例2:一种根据上述实施例1任意一项所述的基于磁定位的颗粒运动轨迹监测系统的定位方法,包括以下步骤:a、获取圆柱形的磁传感器阵列上各传感器所处的空间位置,测量目标永磁体在各传感器位置产生的磁感应强度;b、利用各传感器位置产生的磁感应强度数据以及基于磁偶极子模型所得各传感器位置的理论磁感应强度数据,定义目标永磁体的误差目标函数,所述误差目标函数由永磁体的位置和方向参数决定;c、利用粒子群优化算法寻找所述目标永磁体的位置和方向参数的近似解,使所述误差目标函数最小,并将此近似解作为非线性优化算法的初始种子值进行进一步优化求
解;d、利用非线性优化算法寻找所述目标永磁体的位置和方向参数,使所述误差目标函数最小,此时,所述目标永磁体的位置和方向参数即为目标永磁体的定位数据。
[0036]
在另外一个实施例中,所述步骤a中,磁感应强度为目标永磁体在各传感器所在位置磁场产生的三个正交磁感应强度分量;在另外一个实施例中,所述步骤b中,基于磁偶极子模型所得某一磁传感器所在位置的理论磁感应强度的矢量表达式为:;其中:为永磁体中心点指向某一被测点的向量,为目标永磁体的磁矩方向,为目标永磁体的磁体常数,并且有:;将基于磁偶极子模型所得永磁体在场点处产生的理论磁感应强度表示为空间直角坐标系下的3个分量,所述步骤b和c中的误差目标函数分量计算如下:;其中:为第个磁传感器所在位置磁场的三个正交磁感应强度分量测量值,表示传感器阵列中磁传感器的数量;误差目标函数即等于上述三个误差分量之和,具体表示如下:;在另外一个实施例中,所述非线性优化算法采用levenberg
–
marquardt算法。
[0037]
采用本发明的定位方法,是以磁偶极子模型为基础,结合粒子群优化算法与非线性优化算法作为定位算法,使得定位和定向结果更加准确和稳定。即先利用粒子群优化算法找到永磁体的初始位置和方向参数的近似解,然后将该近似解作为非线性优化算法的初始种子值进行进一步优化求解,并将非线性算法的求解结果作为该定位算法的最终结果。由于通过粒子群优化算法得到的初始参数非常接近目标永磁体实际所处的位置和方向参数,因此再结合非线性算法可以准确的得到运动过程中目标永磁体的实时位姿参数。
[0038]
以上所述实施例仅表达了本发明的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员
来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。