技术特征:
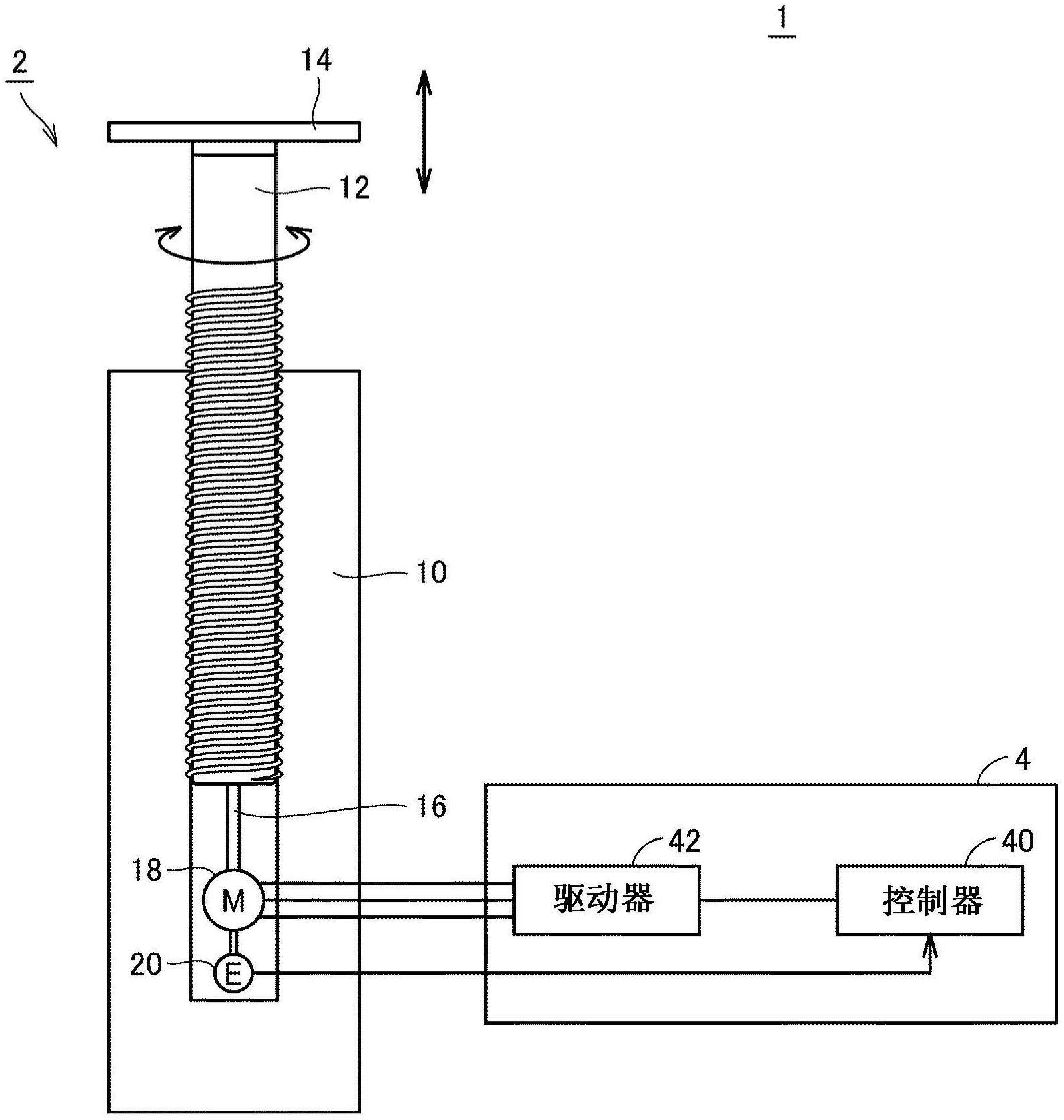
1.一种驱动系统,其中,该驱动系统具有:致动器,其被电机驱动而产生位移;驱动器,其对所述电机进行驱动;以及控制器,其向所述驱动器施加控制指令,所述控制器包含:模型构建部,其基于通过对所述致动器施加来自外部的载荷而产生的位移,构建物理模型;第1指令生成部,其以使所述致动器产生遵循所述物理模型的位移的方式,生成对所述电机的控制指令;决定部,其决定弹簧常数;第2指令生成部,其以使得产生基于所述弹簧常数与所述致动器所产生的位移之积而计算出的驱动力的方式,生成对所述电机的控制指令;以及选择部,其选择使来自所述第1指令生成部和所述第2指令生成部中的哪一个的控制指令有效化。2.根据权利要求1所述的驱动系统,其中,所述选择部在使来自所述第1指令生成部的控制指令有效化时,如果满足规定的切换条件,则使来自所述第2指令生成部的控制指令有效化。3.根据权利要求2所述的驱动系统,其中,所述切换条件基于从对所述致动器施加来自外部的载荷起的经过时间。4.根据权利要求2所述的驱动系统,其中,所述切换条件基于所述致动器所产生的位移。5.根据权利要求1~4中的任意一项所述的驱动系统,其中,所述第1指令生成部将指定所述电机的目标位置的位置指令作为所述控制指令输出,所述第2指令生成部将指定所述电机应产生的转矩的转矩指令作为所述控制指令输出。6.根据权利要求1~5中的任意一项所述的驱动系统,其中,所述模型构建部在从外部向所述致动器施加规定的载荷时,构建所述物理模型。7.根据权利要求1~6中的任意一项所述的驱动系统,其中,所述决定部按照每个控制周期设定弹簧常数。8.一种控制方法,其是被电机驱动而产生位移的致动器的控制方法,其中,该控制方法具有以下步骤:基于通过对所述致动器施加来自外部的载荷而产生的位移,构建物理模型;决定弹簧常数;控制所述电机使所述致动器产生遵循所述物理模型的位移;以及在控制所述电机使所述致动器产生遵循所述物理模型的位移时,如果满足规定的切换条件,则切换所述电机的控制以产生基于所述弹簧常数与所述致动器所产生的位移之积而计算出的驱动力。9.一种控制程序,其用于控制被电机驱动而产生位移的致动器,其中,所述控制程序使计算机执行以下步骤:
基于通过对所述致动器施加来自外部的载荷而产生的位移,构建物理模型;决定弹簧常数;控制所述电机使所述致动器产生遵循所述物理模型的位移;以及在控制所述电机使所述致动器产生遵循所述物理模型的位移时,如果满足规定的切换条件,则切换所述电机的控制以产生基于所述弹簧常数与所述致动器所产生的位移之积而计算出的驱动力。
技术总结
驱动系统包含:致动器,其被电机驱动而产生位移;驱动器,其对电机进行驱动;以及控制器,其向驱动器施加控制指令,控制器包含:模型构建部,其基于通过对致动器施加来自外部的载荷而产生的位移,构建物理模型;第1指令生成部,其以使致动器产生遵循物理模型的位移的方式,生成对电机的控制指令;决定部,其决定弹簧常数;第2指令生成部,其以使得产生基于弹簧常数与致动器所产生的位移之积而计算出的驱动力的方式,生成对电机的控制指令;以及选择部,其选择使来自第1指令生成部和第2指令生成部中的哪一个的控制指令有效化。中的哪一个的控制指令有效化。中的哪一个的控制指令有效化。
技术研发人员:小川敦 稻目幸生 T
受保护的技术使用者:欧姆龙株式会社
技术研发日:2021.03.09
技术公布日:2023/8/31
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。