1.本发明涉及智能交通技术领域,特别涉及一种交叉口的网联车辆层次化速度控制方法。
背景技术:
2.随着生产力水平的提高,汽车保有量的快速增加带来了一系列的交通隐患和能源问题。交通环境中最复杂的驾驶行为往往发生在交叉口,交叉口存在繁杂的信息干扰,驾驶员在交叉口通行时需要进行复杂的判断,这导致交叉口发生交通事故的频率高、能源效率利用差。有研究表明,交叉口车辆复杂的驾驶行为增加了燃油消耗和污染物排放。如何利用智能交通技术达到节能减排的目的具有重要意义。
3.基于v2x(vehicle to everything,车对外界信息交换)技术,网联车辆能够与周围车辆和道路基础设施进行信息交互,实时通信提供相关车辆及其周围环境的状态信息。现有的交叉口速度控制方法往往只考虑单一交叉口的简单工况,或只考虑结合固定路段区域的交通流信息,优化获得一套固定的时序策略。由于这种控制方法未考虑连续信号交叉口以及交叉口上游队列的影响,往往只适用于结构单一、交通流密度低的简单交叉口。
技术实现要素:
4.本发明提供了一种交叉口的网联车辆层次化速度控制方法,其目的是为了解决背景技术中现有的交叉口速度控制方法只适用于结构单一、交通流密度低的简单交叉口的技术问题。
5.为了达到上述目的,本发明提供的一种交叉口的网联车辆层次化速度控制方法,包括如下步骤:
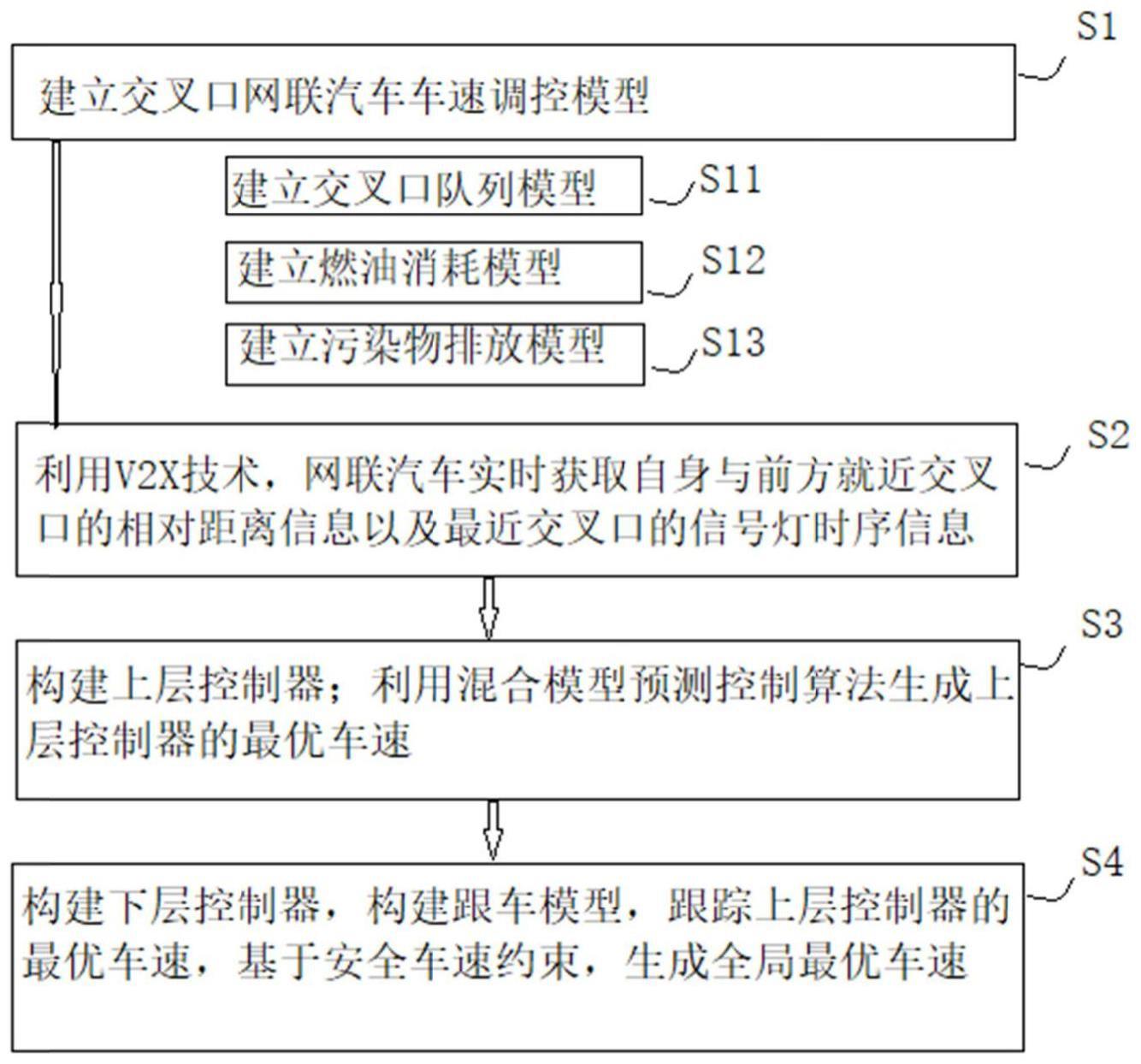
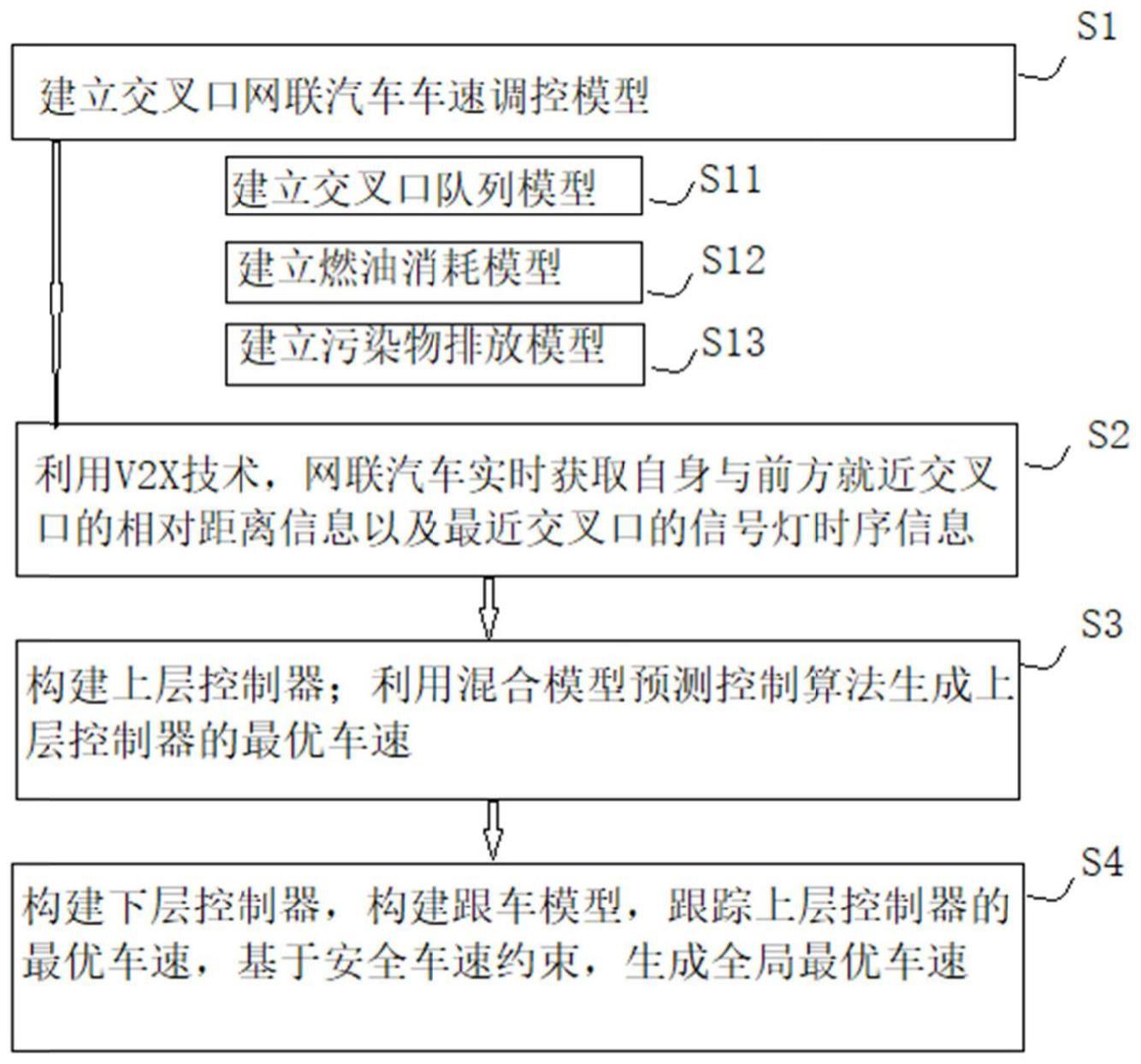
6.步骤s1、建立交叉口网联汽车车速调控模型;具体包括:
7.步骤s11:建立交叉口队列模型:建立网联汽车车速、交叉口相对距离及交叉口信号灯时序之间的列队模型;
8.步骤s12:建立燃油消耗模型:建立网联汽车车速、加速度与燃油消耗之间的燃油消耗模型;
9.步骤s13:建立污染物排放模型:建立网联汽车车速与污染物排放量之间的污染物排放模型;
10.步骤s2、利用v2x技术,网联汽车实时获取自身与前方就近交叉口的相对距离信息以及最近交叉口的信号灯时序信息;
11.步骤s3、构建上层控制器,具体包括:
12.步骤s31:利用混合模型预测控制方法,通过所述步骤s11中的交叉口列队模型,将考虑交叉口队列的自身车辆与最近交叉口信号灯的相对距离转化为有限维度;
13.步骤s32:构建各距离区间内的车速的最优解数值求解模型:采用多重射击算法,在每个距离区间内计算网联汽车车速的最优解;具体包括:
14.步骤s321:构建基于距离区间的非线性规划问题,通过所述步骤s12中的燃油消耗模型,考虑燃油经济性和行驶快速性建立目标函数;
15.步骤s322:在满足约束的条件下,求解各维度区间的可行车速vr;步骤s323:以vr为期望车速,在预测时域中滚动优化求解最优可行车速;
16.步骤s324:通过所述步骤s13中的污染物排放模型,建立以燃油经济性和车速稳定性为目标的函数;
17.步骤s325:在满足约束的条件下,求解获得稳定的上层控制器最优可行车速v
dh
。
18.优选地,还包括如下步骤:
19.步骤s4、构建下层控制器,具体包括:
20.步骤s41、构建以安全驾驶为目标的跟车模型,跟踪上层控制器的最优可行车速;
21.步骤s42、基于安全车速约束,考虑网联汽车位置、前方车辆的位置、安全时距离的约束因素,建立线性规划模型,计算生成全局最优车速vd,实现车速规划。
22.优选地,所述步骤s11具体为:
[0023][0024]
其中,d
length
为交叉口队列长度,单位为m;q
up
为交叉口上游交通流吞吐量,单位为veh/h;p
up
为上游交通流密度,单位为veh/km;q
down
为交叉口下游交通流吞吐量,单位为veh/h;p
jam
为堵塞密度,单位为veh/km;s
light
为信号灯位置,单位为m;x
cav
为被控车辆位置,单位为m;v0为被控车辆初始车速,单位为km/h;t
red
为红灯时间,单位为s;t
green
为绿灯时间,单位为s;t为当前时刻,单位为s;p
down
为下游交通流密度,单位为veh/km;
[0025]
所述步骤s12具体为:
[0026][0027]
其中,costa为燃油消耗,单位为g/km;α,β和γ为常系数;m为车辆质量,单位为kg;v为车辆瞬时速度,单位为m/s;a为车辆瞬时加速度,单位为m/s2;a,b,c为常系数;
[0028]
所述步骤s13具体为:
[0029]
costb=δv εcosta
[0030]
其中,costb为污染物排放量,单位为g/km;δ和ε为常系数;v为车辆瞬时速度,单位为m/s。
[0031]
优选地,所述步骤s2中获取所述相对距离信息具体为:
[0032]
l
l
=s
light-x
cav-d
length
[0033]
其中,l
l
为网联汽车与就近交叉口的相对距离,单位为m;s
light
为就近交叉口信号灯位置,单位为m;x
cav
为网联汽车位置,单位为m;d
length
为就近交叉口等候队列的长度,单位为m。
[0034]
优选地,所述步骤s3具体为:
[0035]
步骤s31:利用混合模型预测控制方法,通过所述步骤s11中的n个交叉口的n个所述交叉口列队模型混合预测,将考虑交叉口队列的自身车辆与最近交叉口信号灯的相对距离转化为有限维度;
[0036]
将l
l
转化为n个有限维度:[l0,l1],[l1,l2]...[l
n-1
,ln],其中,0=l0《l1《...《ln=l
l
;
[0037]
步骤s32:构建各距离区间内的车速的最优解数值求解模型:
[0038][0039]
其中,a
cav
(lm),u
lm
为第m个距离区间的系统输入,即第m个距离区间的网联汽车加速度;x
lm
,v
cav
(lm)为第m个距离区间的系统状态量,即第m个距离区间的网联汽车的瞬时速度;f为最优解数值求解模型;为第m 1个距离区间的系统状态量,即第m 1个距离区间的网联汽车瞬时速度;m即ll的n个维度中的第m个维度;
[0040]
采用多重射击算法,在每个距离区间内计算网联汽车车速的最优解;
[0041]
步骤s321:构建基于距离区间的非线性规划问题,考虑燃油经济性和行驶快速性建立目标函数;具体为:
[0042][0043]
其中,jm为考虑燃油经济性和行驶快速性的目标函数;xl0为第1个维度中系统初始状态量,即网联汽车初始速度,单位为m/s;xlm为第m个维度中系统状态量,即第m个距离区间的网联汽车的瞬时速度,单位为m/s;v为瞬时速度,单位为m/s;ω为权重系数;a,b,c为常系数;为在第m-l个维度到第m个维度中对网联汽车进行距离积分,dl为距离的微分;
[0044]
步骤s322:在满足约束的条件下,求解各维度区间的可行车速vr;
[0045]
步骤s323:以vr为期望车速,在计算设置的预测时域中滚动优化求解最优可行车速;具体为在k时刻的预测时域np中,滚动计算(k 1,k 2,
…
,k np)中最优可行车速;
[0046]
步骤s324:建立以燃油经济性和车速稳定性为目标的函数;具体为:
[0047][0048]
其中,jh为滚动优化的目标函数;n
p
代表预测时域,nc代表控制时域;k i|k代表以第k时刻的值预测第k i时刻的值,v
cav
代表瞬时车速,vr代表各维度区间的可行车速vr;
[0049]
步骤s325:在满足约束的条件下,求解获得稳定的上层控制器最优可行车速v
dh
;具体为:
[0050][0051]
其中,v
min
和v
max
分别为最小速度和最大速度;a
min
和a
ma
x分别为最小加速度和最大加速度;v
dh
为上层控制器生成的最优可行车速,v
cav
代表瞬时车速,a
cav
代表瞬时加速度;uh为上层控制器系统的控制变量;
[0052]
优选地,所述步骤s323具体包括如下步骤:
[0053]
步骤s3231:构建纵向动力学模型:
[0054][0055]
其中,表示网联汽车与前方就近信号灯相对距离及车速,单位为m;表示为k时刻网联汽车与前方就近信号灯相对距离,表示为k时刻的网联汽车瞬时速度,th为采样时间,单位为s;uh为系统控制输入;
[0056]
步骤s3232:滚动优化过程如下:
[0057][0058]
其中,xh为上层控制器状态矩阵,由变量l
l
与v
cav
构成;yh为状态输出矩阵;ah,bh,ch为系数矩阵;xh(k 1)为状态矩阵内第k 1时刻的状态变量值。
[0059]
优选地,所述步骤s4具体为:
[0060]
步骤s4、构建下层控制器,具体包括:
[0061]
步骤s41、构建以安全驾驶为目标的跟车模型,跟踪上层控制器的最优可行车速;
[0062]
所述跟车模型为:
[0063][0064]
其中,x
cav
(t)为t时刻网联汽车位置,单位为m;ts为采样时间,单位为s;t t为第t t时刻,单位为s;v
cav
(t)为t时刻网联汽车速度,单位为m/s;td为上层控制器与下层控制器之间的延迟;ul(t)为t时刻的系统控制输入;
[0065][0066]
x
l
为状态矩阵;y
l
为状态输出矩阵;a
l
,b
l
,c
l
,h,z为系数矩阵;v
dl
为下层控制器生成的最优车速;s
p
为可行驶距离;v
dl
为下层控制器计算生成的最优车速,单位为km/h;u
l
(k)代表下层控制器的系统控制变量,k时刻系统的控制量在驾驶任务中,即为下层控制器的最优车速vdl;xl(k)为状态矩阵内第k时刻的状态变量值;
[0067]
步骤s42、基于安全车速约束,生成全局最优车速vd,实现车速规划;具体为:
[0068][0069]
其中,x
cav
和x
pre
分别代表网联汽车和前方车辆的位置,单位为m;th为安全时距离,单位为s;sf为安全距离,s
p
为可行驶距离,v
dl
为下层控制器的最优车速,v
safe
为安全行驶速度。
[0070]
本发明提供了一种交叉口的网联车辆层次化速度控制方法,实现在不刹车的情况下达到降低燃油消耗和污染物排放的目标。车辆通过v2x技术实时获取前方交叉口信号灯的时序信息以及交叉口队列信息,作为控制方法的约束条件。上层控制器为实时计算的速度规划层,利用获取的信号灯时序信息和车辆自身的状态信息,通过混合模型预测控制算法,在各距离区间内滚动优化,计算避免刹车的最优可行速度。下层控制器为基于安全时距约束的速度规划层,以模型预测控制为框架,在建立的跟车模型中,基于安全速度约束跟踪上层控制器的最优可行车速,生成受控车辆的最优速度。
附图说明
[0071]
图1为本发明的一种交叉口的网联车辆层次化速度控制方法的流程图
[0072]
图2为本发明的一种交叉口的网联车辆层次化速度控制方法的一较佳实施例的控制结构框图;
[0073]
图3为本发明的一种交叉口的网联车辆层次化速度控制方法的一较佳实施例的跟车模型示意图;
[0074]
图4(1)、图4(2)为本发明的一种交叉口的网联车辆层次化速度控制方法的一较佳实施例的仿真结果图。
[0075]
图5(a)、图5(b)为本发明的一种交叉口的网联车辆层次化速度控制方法的实车实验图。
具体实施方式
[0076]
为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
[0077]
本发明针对现有的问题,提供了一种交叉口的网联车辆层次化速度控制方法。由于信号灯的位置是固定的,通过v2x技术,实时获取自身车辆与前方就近交叉口的相对距离以及信号灯的状态信息。根据信号交叉口的波模型,获取交叉口等候的队列长度。上层控制器采用混合模型预测方法,依据收集到的交通信息,生成最优可行车速v
dh
,并作为参考车速输入下层控制器。下层控制器通过建立空间跟车模型,基于模型预测框架生成最优车速和安全车速约束,生成全局最优车速vd,从而实现全局车速规划控制。
[0078]
本发明的实施例如图1、图5(a)及图5(b)所示,,包括如下步骤:
[0079]
步骤s1、建立交叉口网联汽车车速调控模型;具体包括:
[0080]
步骤s11:建立交叉口队列模型:建立网联汽车车速、交叉口相对距离
[0081]
及交叉口信号灯时序之间的列队模型;所述步骤s11具体为:
[0082][0083]
其中,d
length
为交叉口队列长度,单位为m;q
up
为交叉口上游交通流吞吐量,单位为veh/h;p
up
为上游交通流密度,单位为veh/km;q
down
为交叉口下游交通流吞吐量,单位为veh/h;p
jam
为堵塞密度,单位为veh/km;s
light
为信号灯位置,单位为m;x
cav
为被控车辆位置,单位为m;v0为被控车辆初始车速,单位为km/h;t
red
为红灯时间,单位为s;t
green
为绿灯时间,单位为s;t为当前时刻,单位为s;p
down
为下游交通流密度,单位为veh/km;
[0084]
步骤s12:建立燃油消耗模型:建立网联汽车车速、加速度与燃油消耗之间的燃油消耗模型;所述步骤s12具体为:
[0085][0086]
其中,costa为燃油消耗,单位为g/km;α,β和γ为常系数;m为车辆质量,单位为kg;v为车辆瞬时速度,单位为m/s;a为车辆瞬时加速度,单位为m/s2;a,b,c为常系数;
[0087]
步骤s13:建立污染物排放模型:建立网联汽车车速与污染物排放量之间的污染物排放模型;所述步骤s13具体为:
[0088]
costb=δv εcosta
[0089]
其中,costb为污染物排放量,单位为g/km;δ和ε为常系数;v为车辆瞬时速度,单位为m/s。
[0090]
步骤s2、利用v2x技术,网联汽车实时获取自身与前方就近交叉口的相对距离信息以及最近交叉口的信号灯时序信息;所述步骤s2中获取所述相对距离信息具体为:
[0091]
l
l
=s
light-x
cav-d
length
[0092]
其中,l
l
为网联汽车与就近交叉口的相对距离,单位为m;s
light
为就近交叉口信号灯位置,单位为m;x
cav
为网联汽车位置,单位为m;d
length
为就近交叉口等候队列的长度,单位为m。
[0093]
步骤s3、构建上层控制器,具体包括:
[0094]
步骤s31:利用混合模型预测控制方法,通过所述步骤s11中的交叉口列队模型,将考虑交叉口队列的自身车辆与最近交叉口信号灯的相对距离转化为有限维度;
[0095]
所述利用混合模型预测控制方法,具体为通过所述步骤s11中的n个交叉口的n个所述交叉口列队模型混合预测,将考虑交叉口队列的自身车辆与最近交叉口信号灯的相对距离转化为有限维度;
[0096]
将l
l
转化为n个有限维度:[l0,l1],[l1,l2]...[l
n-1
,ln],其中,0=l0《l1《...《ln=l
l
;
[0097]
步骤s32:构建各距离区间内的车速的最优解数值求解模型:
[0098][0099]
此处为一个求解模型,用u表示输入量,x表示状态量。
[0100]
其中,a
cav
(lm),u
lm
为第m个距离区间的系统输入,即第m个距离区间的网联汽车加
速度;x
lm
,v
cav
(lm)为第m个距离区间的系统状态量,即第m个距离区间的网联汽车的瞬时速度;f为最优解数值求解模型;为第m 1个距离区间的系统状态量,即第m 1个距离区间的网联汽车瞬时速度;m即ll的n个维度中的第m个维度;
[0101]
采用多重射击算法,在每个距离区间内计算网联汽车车速的最优解;具体包括:
[0102]
步骤s321:构建基于距离区间的非线性规划问题,通过所述步骤s12中的燃油消耗模型,考虑燃油经济性和行驶快速性建立目标函数;具体为:
[0103][0104]
其中,jm为考虑燃油经济性和行驶快速性的目标函数;xl0为第1个维度中系统初始状态量,即网联汽车初始速度,单位为m/s;xlm为第m个维度中系统状态量,即第m个距离区间的网联汽车的瞬时速度,单位为m/s;v为瞬时速度,单位为m/s;ω为权重系数;a,b,c为常系数;为在第m-l个维度到第m个维度中对网联汽车进行距离积分,dl为距离的微分;
[0105]
步骤s322:在满足约束的条件下,求解各维度区间的可行车速vr;
[0106]
步骤s323:以vr为期望车速,在预测时域中滚动优化求解最优可行车速;具体为:以vr为期望车速,在计算设置的预测时域中滚动优化求解最优可行车速;具体为在k时刻的预测时域n
p
中,滚动计算(k 1,k 2,
…
,k n
p
)中最优可行车速;
[0107]
所述步骤s323具体包括如下步骤:
[0108]
步骤s3231:构建纵向动力学模型:
[0109][0110]
其中,表示网联汽车与前方就近信号灯相对距离及车速,单位为m;表示为k时刻网联汽车与前方就近信号灯相对距离,表示为k时刻的网联汽车瞬时速度,th为采样时间,单位为s;uh为系统控制输入;
[0111]
步骤s3232:滚动优化过程如下:
[0112][0113]
其中,xh为上层控制器状态矩阵,由变量l
l
与v
cav
构成;yh为状态输出矩阵;ah,bh,ch为系数矩阵;xh(k 1)为状态矩阵内第k 1时刻的状态变量值。
[0114]
步骤s324:通过所述步骤s13中的污染物排放模型,建立以燃油经济性和车速稳定性为目标的函数;具体为:
[0115][0116]
其中,jh为滚动优化的目标函数;np代表预测时域,nc代表控制时域;k i|k代表以第k时刻的值预测第k i时刻的值,v
cav
代表瞬时车速,vr代表各维度区间的可行车速vr;
[0117]
步骤s325:在满足约束的条件下,求解获得稳定的上层控制器最优可行车速v
dh
;具体为:
[0118][0119]
其中,v
min
和v
max
分别为最小速度和最大速度;a
min
和a
ma
x分别为最小加速度和最大加速度;v
dh
为上层控制器生成的最优可行车速,v
cav
代表瞬时车速,a
cav
代表瞬时加速度;uh为上层控制器系统的控制变量;
[0120]
与以往只使用数值求解或模型预测控制方法不同,混合模型预测控制方法是一种融合方法。首先采用多重射击算法生成各距离区间内的最优速度轨迹,进而在模型预测框架下进行滚动优化。混合模型预测控制方法克服了传统模型预测控制计算量大的缺点,同时保留了模型预测控制方法的预测特性,计算结果比传统数值求解更符合控制目标;
[0121]
构建的上层控制器采用了混合模型预测控制方法。与以往只使用数值求解或模型预测控制方法不同,混合模型预测控制方法是一种融合方法。首先采用多重射击算法生成各距离区间内的最优速度轨迹,进而在模型预测框架下进行滚动优化。混合模型预测控制方法克服了传统模型预测控制计算量大的缺点,同时保留了模型预测控制方法的预测特性,计算结果比传统数值求解更符合控制目标,如图4(1)及图4(2)所示。
[0122]
步骤s4、构建下层控制器,具体包括:
[0123]
步骤s41、构建以安全驾驶为目标的跟车模型,如图3所示,跟踪上层控制器的最优可行车速;所述跟车模型为:
[0124][0125]
其中,x
cav
(t)为t时刻网联汽车位置,单位为m;ts为采样时间,单位为s;t t为第t t时刻,单位为s;v
cav
(t)为t时刻网联汽车速度,单位为m/s;td为上层控制器与下层控制器之间的延迟;ul(t)为t时刻的系统控制输入;
[0126]
采用模型预测控制框架,跟踪上层控制器的全局最优可行车速:
[0127][0128]
x
l
为状态矩阵;y
l
为状态输出矩阵;a
l
,b
l
,c
l
,h,z为系数矩阵;v
dl
为下层控制器生成的最优车速;s
p
为可行驶距离;v
dl
为下层控制器计算生成的最优车速,单位为km/h;u
l
(k)代表下层控制器的系统控制变量,k时刻系统的控制量在驾驶任务中,即为下层控制器的最优车速vdl;xl(k)为状态矩阵内第k时刻的状态变量值。
[0129]sp
展示在图2中,是一个变量。v
dl
和u
l
(k)本质上是相同的,u
l
代表算法计算的结果,
是一个控制量。在驾驶任务中,就是下层控制器的最优车速v
dl
。
[0130]
步骤s42、基于安全车速约束,考虑网联汽车位置、前方车辆的位置、安全时距离的约束因素,建立线性规划模型,计算生成全局最优车速vd,实现车速规划;具体为:
[0131][0132]
其中,x
cav
和x
pre
分别代表网联汽车和前方车辆的位置,单位为m;th为安全时距离,单位为s;sf为安全距离,s
p
为可行驶距离,v
dl
为下层控制器的最优车速,v
safe
为安全行驶速度。
[0133]
通过上层控制器和下层控制器的组合,可以实时得到改善燃油效率、降低污染物排放以及快速通行的全局最优车速,以实现网联汽车在连续信号交叉口通行时的最优车速调控问题。
[0134]
本发明提供了一种交叉口的网联车辆层次化速度控制方法,实现在不刹车的情况下达到降低燃油消耗和污染物排放的目标。车辆通过v2x技术实时获取前方交叉口信号灯的时序信息以及交叉口队列信息,作为控制方法的约束条件。上层控制器为实时计算的速度规划层,利用获取的信号灯时序信息和车辆自身的状态信息,通过混合模型预测控制算法,在各距离区间内滚动优化,计算避免刹车的最优可行速度。下层控制器为基于安全时距约束的速度规划层,以模型预测控制为框架,在建立的跟车模型中,基于安全速度约束跟踪上层控制器的最优可行车速,生成受控车辆的最优速度。
[0135]
本发明的技术原理是构建上层控制器和下层控制器,提出一种层次化速度控制方法,上层控制器构建以燃油经济性、行驶快速性以及车速稳定性为目标的函数,通过混合模型预测控制方法,将控制问题转化为距离域的有限维度求解问题;下层控制器构建以安全驾驶为目标的跟车模型,基于安全车速跟踪上层最优可行车速,生成全局最优车速,以改善通行效率,提高燃油利用率;
[0136]
将不同的驾驶任务分配到两个控制器中,降低了计算时间。上层控制器和下层控制器可以搭配多种使用需求。例如网联化程度较低时,采用中央模式。将上层控制器配置在交叉口的中央云端服务器,车辆接受云端服务器的指令。网联化程度较高时,采用独立模式。将上层控制器配置在车辆中央单元,每辆网联汽车独立完成控制目标。同时,层次化控制方法也能配置中央 独立的混合模式,层次化控制方法为网联汽车在连续信号交叉口控制提供了一种新的思路。
[0137]
本发明的优点是:
[0138]
该方法采用了分层的速度优化设计。上层控制器计算最佳可行速度,以避免制动在红灯。下层控制器考虑前方车辆的影响,结合安全速度约束,生成满足安全距离的最优速度。该策略实现了安全驾驶。
[0139]
针对现实路网中多重约束下求解过程复杂的问题,基于网联环境,提出了一种基于连续信号交叉口的网联汽车速度控制方法。该方法将多重射击算法与传统模型预测控制方法相结合,在保留模型预测控制方法特性的同时,采用多重射击算法将问题转化为有限维度进行求解,克服了传统模型预测控制方法计算量大的缺点。
[0140]
本发明充分考虑了不同驾驶条件下的驾驶需求,且实施简单,根据任务目标的不同,分层控制方法为智能网联汽车在连续信号交叉口控制提供了新思路。
[0141]
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。