技术特征:
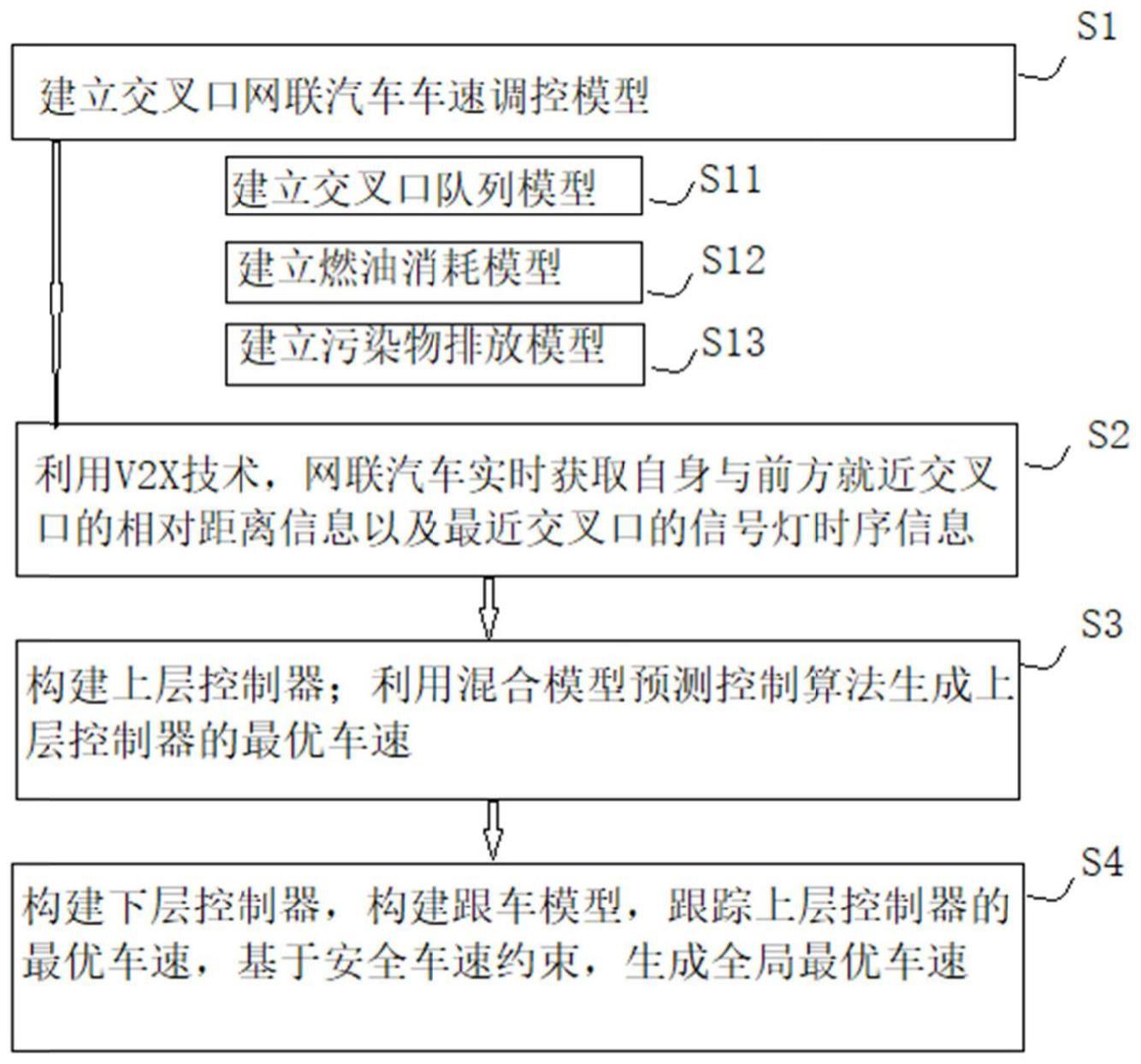
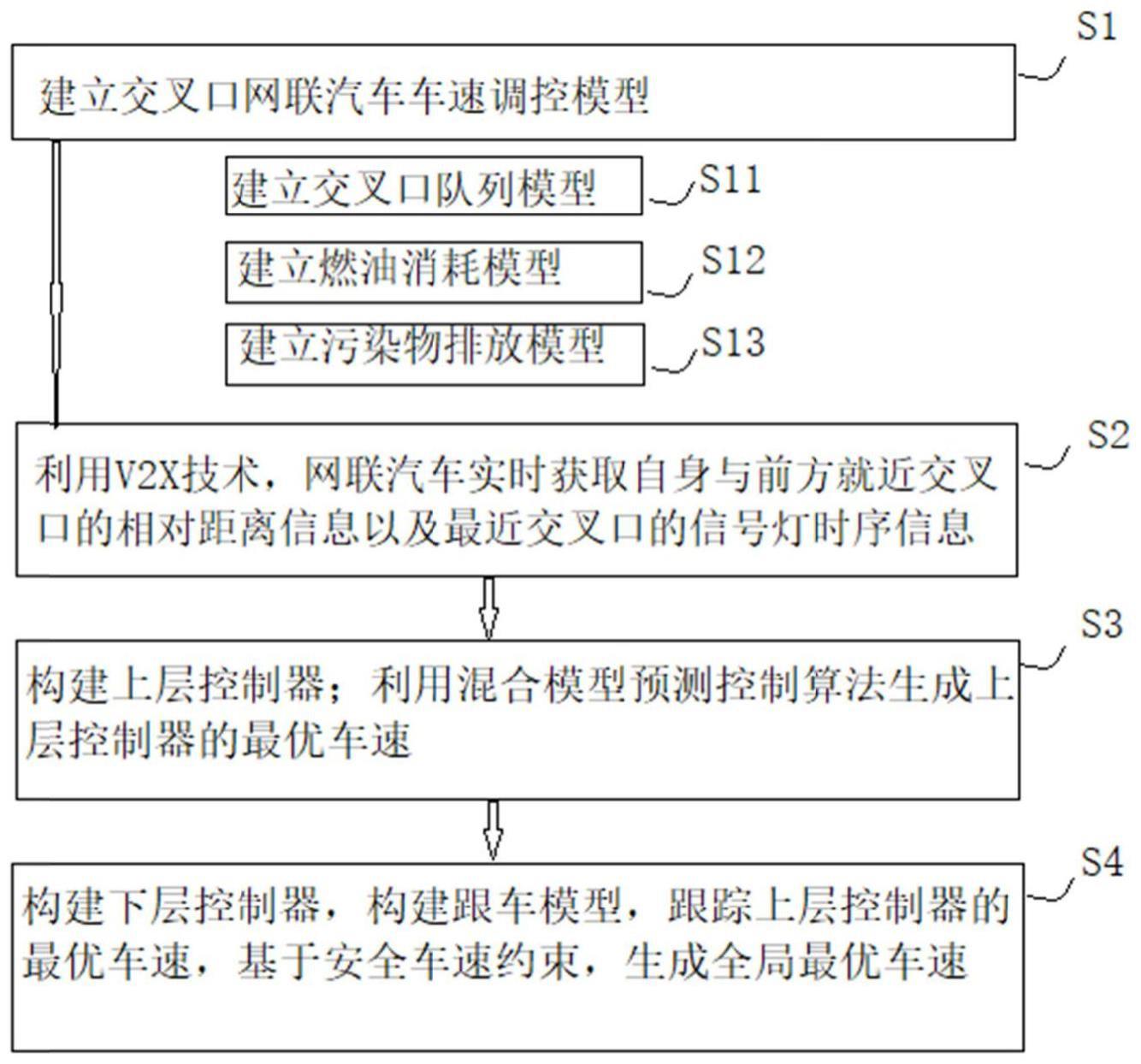
1.一种交叉口的网联车辆层次化速度控制方法,其特征在于,包括如下步骤:步骤s1、建立交叉口网联汽车车速调控模型;具体包括:步骤s11:建立交叉口队列模型:建立网联汽车车速、交叉口相对距离及交叉口信号灯时序之间的列队模型;步骤s12:建立燃油消耗模型:建立网联汽车车速、加速度与燃油消耗之间的燃油消耗模型;步骤s13:建立污染物排放模型:建立网联汽车车速与污染物排放量之间的污染物排放模型;步骤s2、利用v2x技术,网联汽车实时获取自身与前方就近交叉口的相对距离信息以及最近交叉口的信号灯时序信息;步骤s3、构建上层控制器,具体包括:步骤s31:利用混合模型预测控制方法,通过所述步骤s11中的交叉口列队模型,将考虑交叉口队列的自身车辆与最近交叉口信号灯的相对距离转化为有限维度;步骤s32:构建各距离区间内的车速的最优解数值求解模型:采用多重射击算法,在每个距离区间内计算网联汽车车速的最优解;具体包括:步骤s321:构建基于距离区间的非线性规划问题,通过所述步骤s12中的燃油消耗模型,考虑燃油经济性和行驶快速性建立目标函数;步骤s322:在满足约束的条件下,求解各维度区间的可行车速v
r
;步骤s323:以v
r
为期望车速,在预测时域中滚动优化求解最优可行车速;步骤s324:通过所述步骤s13中的污染物排放模型,建立以燃油经济性和车速稳定性为目标的函数;步骤s325:在满足约束的条件下,求解获得稳定的上层控制器最优可行车速v
dh
。2.根据权利要求1所述的一种交叉口的网联车辆层次化速度控制方法,其特征在于,还包括如下步骤:步骤s4、构建下层控制器,具体包括:步骤s41、构建以安全驾驶为目标的跟车模型,跟踪上层控制器的最优可行车速;步骤s42、基于安全车速约束,考虑网联汽车位置、前方车辆的位置、安全时距离的约束因素,建立线性规划模型,计算生成全局最优车速v
d
,实现车速规划。3.根据权利要求1所述的一种交叉口的网联车辆层次化速度控制方法,其特征在于,所述步骤s11具体为:其中,d
length
为交叉口队列长度,单位为m;q
up
为交叉口上游交通流吞吐量,单位为veh/h;p
up
为上游交通流密度,单位为veh/km;q
down
为交叉口下游交通流吞吐量,单位为veh/h;p
jam
为堵塞密度,单位为veh/km;s
light
为信号灯位置,单位为m;x
cav
为被控车辆位置,单位为m;v0为被控车辆初始车速,单位为km/h;t
red
为红灯时间,单位为s;t
green
为绿灯时间,单位为s;t为当前时刻,单位为s;p
down
为下游交通流密度,单位为veh/km;所述步骤s12具体为:
其中,costa为燃油消耗,单位为g/km;α,β和γ为常系数;m为车辆质量,单位为kg;v为车辆瞬时速度,单位为m/s;a为车辆瞬时加速度,单位为m/s2;a,b,c为常系数;所述步骤s13具体为:costb=δv εcosta其中,costb为污染物排放量,单位为g/km;δ和ε为常系数;v为车辆瞬时速度,单位为m/s。4.根据权利要求1所述的一种交叉口的网联车辆层次化速度控制方法,其特征在于,所述步骤s2中获取所述相对距离信息具体为:l
l
=s
light-x
cav-d
length
其中,l
l
为网联汽车与就近交叉口的相对距离,单位为m;s
light
为就近交叉口信号灯位置,单位为m;x
cav
为网联汽车位置,单位为m;d
length
为就近交叉口等候队列的长度,单位为m。5.根据权利要求4所述的一种交叉口的网联车辆层次化速度控制方法,其特征在于,所述步骤s3具体为:步骤s31:利用混合模型预测控制方法,通过所述步骤s11中的n个交叉口的n个所述交叉口列队模型混合预测,将考虑交叉口队列的自身车辆与最近交叉口信号灯的相对距离转化为有限维度;将l
l
转化为n个有限维度:[l0,l1],[l1,l2]...[l
n-1
,l
n
],其中,0=l0<l1<...<l
n
=l
l
;步骤s32:构建各距离区间内的车速的最优解数值求解模型:其中,a
cav
(lm),u
lm
为第m个距离区间的系统输入,即第m个距离区间的网联汽车加速度;x
lm
,v
cav
(lm)为第m个距离区间的系统状态量,即第m个距离区间的网联汽车的瞬时速度;f为最优解数值求解模型;为第m 1个距离区间的系统状态量,即第m 1个距离区间的网联汽车瞬时速度;m即ll的n个维度中的第m个维度;采用多重射击算法,在每个距离区间内计算网联汽车车速的最优解;步骤s321:构建基于距离区间的非线性规划问题,考虑燃油经济性和行驶快速性建立目标函数;具体为:其中,jm为考虑燃油经济性和行驶快速性的目标函数;x
l0
为第1个维度中系统初始状态量,即网联汽车初始速度,单位为m/s;x
lm
为第m个维度中系统状态量,即第m个距离区间的网联汽车的瞬时速度,单位为m/s;v为瞬时速度,单位为m/s;ω为权重系数;a,b,c为常系数;为在第m-l个维度到第m个维度中对网联汽车进行距离积分,dl为距离的微分;
步骤s322:在满足约束的条件下,求解各维度区间的可行车速v
r
;步骤s323:以v
r
为期望车速,在计算设置的预测时域中滚动优化求解最优可行车速;具体为在k时刻的预测时域np中,滚动计算(k 1,k 2,
…
,k np)中最优可行车速;步骤s324:建立以燃油经济性和车速稳定性为目标的函数;具体为:其中,j
h
为滚动优化的目标函数;np代表预测时域,nc代表控制时域;k i|k代表以第k时刻的值预测第k i时刻的值,v
cav
代表瞬时车速,v
r
代表各维度区间的可行车速v
r
;步骤s325:在满足约束的条件下,求解获得稳定的上层控制器最优可行车速v
dh
;具体为:其中,v
min
和v
max
分别为最小速度和最大速度;a
min
和a
ma
x分别为最小加速度和最大加速度;v
dh
为上层控制器生成的最优可行车速,v
cav
代表瞬时车速,a
cav
代表瞬时加速度;u
h
为上层控制器系统的控制变量。6.根据权利要求5所述的一种交叉口的网联车辆层次化速度控制方法,其特征在于,所述步骤s323具体包括如下步骤:步骤s3231:构建纵向动力学模型:其中,表示网联汽车与前方就近信号灯相对距离及车速,单位为m;表示为k时刻网联汽车与前方就近信号灯相对距离,表示为k时刻的网联汽车瞬时速度,t
h
为采样时间,单位为s;u
h
为系统控制输入;步骤s3232:滚动优化过程如下:其中,x
h
为上层控制器状态矩阵,由变量l
l
与v
cav
构成;y
h
为状态输出矩阵;a
h
,b
h
,c
h
为系数矩阵;x
h
(k 1)为状态矩阵内第k 1时刻的状态变量值。7.根据权利要求6所述的一种交叉口的网联车辆层次化速度控制方法,其特征在于,所述步骤s4具体为:步骤s4、构建下层控制器,具体包括:步骤s41、构建以安全驾驶为目标的跟车模型,跟踪上层控制器的最优可行车速;所述跟车模型为:
其中,x
cav
(t)为t时刻网联汽车位置,单位为m;ts为采样时间,单位为s;t t为第t t时刻,单位为s;v
cav
(t)为t时刻网联汽车速度,单位为m/s;t
d
为上层控制器与下层控制器之间的延迟;ul(t)为t时刻的系统控制输入;采用模型预测控制框架,跟踪上层控制器的全局最优可行车速:x
l
为状态矩阵;y
l
为状态输出矩阵;a
l
,b
l
,c
l
,h,z为系数矩阵;v
dl
为下层控制器生成的最优车速;s
p
为可行驶距离;v
dl
为下层控制器计算生成的最优车速,单位为km/h;u
l
(k)代表下层控制器的系统控制变量,k时刻系统的控制量在驾驶任务中,即为下层控制器的最优车速vdl;xl(k)为状态矩阵内第k时刻的状态变量值。步骤s42、基于安全车速约束,生成全局最优车速v
d
,实现车速规划;具体为:其中,x
cav
和x
pre
分别代表网联汽车和前方车辆的位置,单位为m;th为安全时距离,单位为s;s
f
为安全距离,s
p
为可行驶距离,v
dl
为下层控制器的最优车速,v
safe
为安全行驶速度。
技术总结
本发明提供了一种交叉口的网联汽车层次化速度控制方法包括如下步骤:包括如下步骤:步骤S1、建立交叉口网联汽车车速调控模型;步骤S2、利用V2X技术,网联汽车实时获取自身与前方就近交叉口的相对距离信息以及最近交叉口的信号灯时序信息;步骤S3、构建上层控制器;利用混合模型预测控制算法生成上层控制器的最优车速;步骤S4、构建下层控制器,构建跟车模型,跟踪上层控制器的最优车速,基于安全车速约束,生成全局最优车速。本发明实现在不刹车的情况下达到节能减排、提高燃油消耗经济性以及减少碳、氮氧化物的排放。氮氧化物的排放。氮氧化物的排放。
技术研发人员:张细政 方偲忱 崔子健 杨明昊 宋安然 张鸣
受保护的技术使用者:湘潭南方电机车制造有限公司
技术研发日:2023.03.10
技术公布日:2023/8/31
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。