用于成像的系统和方法
1.相关申请的交叉引用
2.本技术要求2021年9月13日提交的美国专利申请号17/473,646、2021年9月13日提交的美国专利申请号17/473,695和2021年9月13日提交的美国专利申请号17/473,728的优先权,并且还要求2020年9月14日提交的美国临时申请号63/078,048、2020年9月14日提交的美国临时申请号63/078,060和2020年9月14日提交的美国临时申请号63/078,065的权益。上述申请的全部公开内容以引用方式并入本文。
技术领域
3.本主题公开涉及成像,并且具体地涉及利用多源成像系统的成像及其相关方法。
背景技术:
4.本部分提供与本公开相关的背景信息,其不一定是现有技术。
5.成像系统通常包括源部分和检测器部分。源部分生成由检测器部分检测的信号。可相对于成像系统定位对象,以便以允许获取图像数据和/或相关图像或允许重建图像的方式衰减源与检测器之间的信号。然而,成像系统通常限于单个源和单个检测器。因此,待成像的体积通常与源和相关检测器的尺寸成比例,并且因此,对于较大的对象需要较大的源和检测器。
技术实现要素:
6.本部分提供本公开的一般概述,并且不是本公开的完整范围或其全部特征的全面公开。
7.导航系统可用于跟踪和确定姿势(也称为位置),该姿势可包括器械随时间推移的定位和/或取向的至少一些坐标。在各种实施方案中,器械的姿势被理解为包括至少一些被跟踪或导航的定位坐标(例如,x、y、z)和/或取向坐标(例如,滚转、俯仰、偏航)。因此,导航系统可跟踪对象的姿势,包括至少一个自由度并且还包括至少六个运动自由度(例如,三维位置和多个(例如,俯仰、滚转和偏航)的取向)。被跟踪器械的姿势可在瞬时和/或随时间确定。在各种实施方案中,可用显示设备相对于图像(诸如对象的至少一部分的图像)来示出器械的视觉表示。
8.在各种实施方案中,可相对于对象确定被跟踪的器械的姿势。对象可以是任何适当的对象,诸如活体或非活体对象。在各种实施方案中,非活体对象可包括中空或封闭的壳体或其他适当的无生命对象。无生命对象可具有不透明的外覆盖物。因此,导航或跟踪系统可用于在使用期间相对于无生命对象跟踪器械。
9.在各种实施方案中,对象可包括活体对象,诸如人类对象。规程可包括外科手术规程,其中器械被定位在对象体内选定的时间段以执行规程,诸如支架放置、深度脑刺激探针放置、或放置或植入其他可植入构件。此外,选定规程可包括相对于对象的骨切除、孔形成等。无论如何,可通过导航系统确定器械的姿势。
10.成像系统可包括彼此间隔开的多个源。该多个源可被单独供电以从单独源中的每一者发射信号,诸如x射线。来自每个源的x射线可在选定的时间被检测器检测。
11.通常,源可彼此间隔开,以允许从每个源收集相对于对象的不同位置处的图像数据。源可沿可以是对象的纵向轴线的z轴(例如成像系统的移动轴线)相对于彼此间隔开。源还可沿环形半径间隔开,使得源彼此成角度地间隔开。间隔开的源也可相对于对象移动,诸如以圆形图案、螺旋状图案、螺旋图案、它们的部分或它们的组合。因此,该多个源可相对于彼此和检测器定位,以便以选定的方式获取对象的图像数据。
12.该多个源(也被称为多源)可以选定的方式单独地操作以获取对象的图像数据。例如,该多个源可包括两个或更多个源、五个或更多个源、十个或更多个源和/或十五个或更多个源。例如,如果包括五个源,则成像系统可操作以从由一段时间隔开的每个源顺序地发射x射线。在各种实施方案中,五个源中的每一者可被供电以发射x射线持续选定的时间段(例如,一毫秒)并且在源的每次供电之间暂停选定的时间段(例如一毫秒)。此外,可以任何适当或选定的模式以非顺序的方式对源供电,诸如同时或顺序地对第一源和第三源供电,随后也同时和/或顺序地对第三源和第五源供电。因此,多源成像系统可操作以通过选择性地同时、顺序、串行或以任何适当方式对多个源供电和操作来以任何适当方式发射x射线。
13.根据本文提供的描述,另外的适用性领域将变得显而易见。本概述中的描述和具体示例仅旨在用于说明的目的,并且不旨在限制本公开的范围。
附图说明
14.本文所述的附图仅用于选定实施方案的说明性目的,而不是所有可能的具体实施,并且不旨在限制本公开的范围。
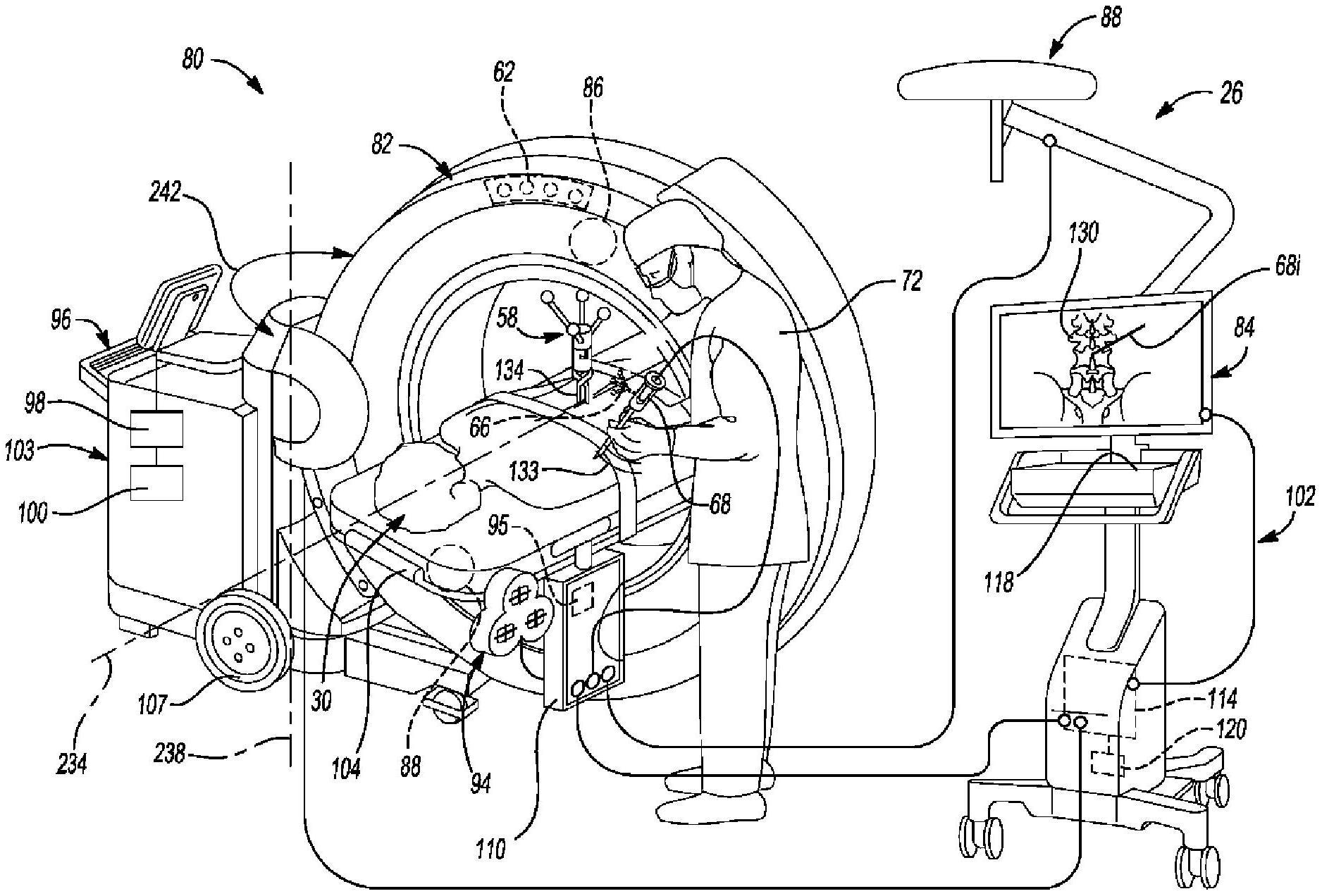
15.图1是示出根据各种实施方案的包括成像系统的手术室的概览的图解视图;
16.图2是根据各种实施方案的具有源组件的成像系统的细节的示意性图示,该源组件具有多个源部分;
17.图3是根据各种实施方案的具有源组件的成像系统的细节的示意性图示,该源组件具有多个源部分;
18.图4a-图4c是根据各种实施方案的具有成像源的成像系统的示意性图示,该成像源具有各种数量的源部分和相应的可能束和成像体积;
19.图5是根据各种实施方案的具有源组件的成像系统的示意图,该源组件具有多个源部分;
20.图6a和图6b是具有源组件的成像系统的示意性图示,该源组件具有多个源部分,以及相对于成像体积的来自选定源部分的说明性投影;
21.图7a-图7c示出了在源组件相对于成像体积的选定位置处由具有多个源部分的源组件发射的成像束;
22.图8a-图8c是根据各种实施方案的具有源组件的成像系统的视图,该源组件具有多个源部分,这些源部分相对于成像系统的平面或线反对称地定位并且相对于成像体积处于多个位置;
23.图9a-图9d是根据各种实施方案的具有可相对于机架移动的源组件的成像系统的示意图;
24.图10a和图10b示出了根据各种实施方案的具有源组件的成像系统,该源组件具有多个源部分和选定束的选定重叠;
25.图11是根据各种实施方案的成像系统的示意图,该成像系统具有源组件和多个源部分,这些源部分具有对成像体积进行成像的几何形状;
26.图12是根据各种实施方案的源组件的示意性图示,该源组件具有多个源部分,这些源部分中的一个或多个源部分具有选定特性;
27.图13a-图13d是根据各种实施方案的具有源组件的成像系统和源组件相对于成像体积的移动的示意性图示,该源组件具有多个源部分;
28.图14是根据各种实施方案的成像系统的操作的流程图;
29.图15是根据图14的流程图操作的成像系统的示意性图示;
30.图16是示出根据各种实施方案的成像系统的操作的流程图;
31.图17a和图17b是根据图16的流程图操作的成像系统的示意性图示;
32.图18是根据各种实施方案的具有同时操作的多个源部分的成像系统的示意性图示;并且
33.图19是根据各种实施方案的用如图18所示的系统生成的图像的示意性图示。
34.在所有附图的若干个视图中,对应的附图标记指示对应的部件。
具体实施方式
35.现在将参考附图更完整地描述示例性实施方案。
36.本文公开了示例性实施方案,如本文进一步讨论的。通常,可相对于人类对象公开各种实施方案。然而,应当理解,可相对于可能具有可涵盖内部部件或操作的外壳或壳体的任何对象或系统使用各种公开的系统(诸如导航或跟踪系统)。例如,机身或汽车框架可遮挡内部部件,该内部部件可被选择为在选定规程中进行操作。选定规程可包括任何非生命或无生命系统的各种部件的移除、替换等。因此,应当理解,本文相对于对象(诸如人类对象)的讨论仅是示例性的。
37.此外,如本文所讨论的,导航系统可包括相对于坐标系或空间内的参考系跟踪各种部件(诸如器械)。在各种实施方案中,坐标空间可包括对象坐标空间或由相对于对象的真实空间限定的真实空间。附加坐标空间可包括图像空间,该图像空间具有由对象的图像限定的图像坐标空间。如上所讨论,器械的姿势可相对于图像示出(例如叠加在图像上),该图像具有供使用者查看的图形表示。此类图示可能需要或使用对象空间或对象坐标空间与图像坐标空间或图像空间之间的配准。如本文所讨论的成像系统可被构造和/或操作以获取图像数据以用于生成对象的选定图像。
38.将由对象限定的对象空间配准到图像空间的一种或多种方法可包括在美国专利号8,737,708、美国专利号9,737,235、美国专利号8,503,745和美国专利号8,175,681中公开的方法,所有这些专利均全部以引用方式并入本文。
39.根据各种实施方案,图1是示出手术室或区域的概览的图解视图。在各种实施方案中,手术室可包括外科手术套件。外科手术套件可包括导航系统26,该导航系统可用于各种规程,诸如相对于对象30的规程。
40.导航系统26可用于跟踪一个或多个跟踪设备的姿势。跟踪设备可包括能够操作以
由一个或多个跟踪系统(诸如光学或电磁(em)跟踪系统)跟踪的跟踪设备。例如,跟踪设备可包括对象跟踪设备或动态参考系(drf)58(其可被单独地称为em 58'和/或光学58')、成像系统跟踪设备62(其可被单独地称为em 62'和/或光学62')、和/或工具跟踪设备66(其可被单独地称为em 66'和/或光学66')。还可包括其他跟踪设备,诸如单独地或与其他系统(例如,增强现实系统)组合的使用者或临床医生跟踪设备。
41.工具68可由使用者72操作或处理。工具68还可被称为能够操作以被跟踪的对象或物品。因此,工具68可与工具跟踪设备66相关联。工具68可以是任何适当的工具,诸如钻头、镊子或由使用者72操作的其他工具。工具68还可包括植入物,例如脊椎植入物或整形外科植入物。应当进一步注意的是,导航系统26可以用于导航任何类型的器械、植入物或递送系统,包括:导丝、关节镜系统、矫形植入物、脊柱植入物、脑深部刺激(dbs)探针等。此外,这些器械可以用于导航或映射身体的任何区域。导航系统26和各种器械可以用于任何适当手术中,例如通常微创手术或开放式手术的器械。
42.成像系统80可包括任何一个或多个可用于获取对象诸如对象30的术前、术中或术后或实时图像数据的设备。然而,应当理解,可以对任何适当的对象成像,并且可以相对于对象实施任何适当的手术。在所示出的示例中,成像系统80包括由在美国科罗拉多州路易斯维尔设有营业场所的美敦力导航公司销售的成像设备。成像设备80可以具有大致环形的机架壳体82,图像捕获部分可移动地放置在该机架壳体中。图像捕获部分可包括x射线源或发射部分86和x射线检测器88(也称为接收或图像接收部分)。如本文所讨论的,源86可包括一个或多个发射点或部分,每个发射点或部分可被操作以向检测器88发射x射线。源86(包括一个或多个发射部分)和检测器88两者可被操作以作为图像捕获部分移动。
43.在各种实施方案中,源86和检测器88通常或实际上尽可能彼此成180度地定位。如上所讨论,源可包括多个发射部分,然而,源和检测器可相对于轨道或导轨(未示出)安装在转子上。图像捕获部分可以是能够操作的,以在图像获取期间旋转至少360度或其任何选定部分。图像捕获部分可以绕中心点或轴线旋转,从而允许从多个方向或在多个平面中获取对象30的图像数据。成像设备80可包括至少选定的部分,包括在以下中公开的部分(例如,机架、移动推车等):美国专利号7,188,998、美国专利号7,108,421、美国专利号7,106,825、美国专利号7,001,045和美国专利号6,940,941,所有这些专利均以引用方式并入本文,或它们的任何适当部分。在各种实施方案中,成像设备80可利用具有选定像素查看区域的平板或面板检测器88技术。
44.可以相对于成像设备80的任何其他部分精确地知道成像设备80和/或其中的部分例如图像捕获部分的位置。根据各种实施方案,成像设备80可以知道并相对于固定坐标系或选定坐标系再调用精确的坐标。这可以允许成像系统80知道其相对于患者30或其他参考的位置。另外,如本文所讨论的,图像捕获部分的位置的精确知识可以与跟踪系统结合使用,以确定图像捕获部分的位置和相对于被跟踪的对象如患者30等的图像数据。
45.成像设备80也可以用图像跟踪设备62来跟踪。根据各种实施方案,限定患者30的获取的图像空间的图像数据可以相对于目标空间固有地或自动地配准。目标空间可以是由患者30在导航系统26中限定的空间。自动配准可以通过在成像设备80上包括跟踪设备62和/或图像捕获部分的可确定的精确姿势来实现。根据各种实施方案,如本文所讨论的,还可使用可成像部分、虚拟基准点和其他特征来允许自动或以其他方式的配准。然而,将理解
navigation and patient positioning device)”的美国专利申请公布号2004/0199072中所述的那些,该专利据此以引用方式并入。
52.因此,可以通过导航系统26确定患者30相对于成像系统80的位置。跟踪设备62可用于跟踪成像设备80的至少一部分(例如机架或外壳82)并确定其姿势。如本文进一步讨论的,可以用动态参考系58跟踪患者30。因此,可通过跟踪患者跟踪设备58和成像跟踪设备62来确定患者30相对于成像设备80的位置。然而,如本文所讨论的,成像系统80可被操作以确定对象30相对于成像系统80的选定部分的位置。在各种实施方案中,由于成像部分在外壳82内的导轨上的精确位置、基本上不灵活的转子等,可以相对于外壳82确定成像部分的姿势。如果成像设备80是由在科罗拉多州路易斯维尔设有营业场所的美敦力导航公司出售的成像设备,则成像设备80可以包括例如在10微米以内的精度。在以下中进一步描述了成像部分的精确定位:美国专利号7,188,998号、美国专利号7,108,421、美国专利号7,106,825、美国专利号7,001,045和美国专利号6,940,941,所有这些专利均通过引用并入本文。
53.根据各种实施方案,成像设备80可从x射线源86生成和/或发射x射线,该x射线传播通过患者30并被可包括在图像捕获部分中的x射线检测器88接收。x射线检测器88生成表示接收或检测到的x射线强度的图像数据。在各种实施方案中,图像捕获部分可以包括首先将x射线转换为可见光的图像增强器和将可见光转换为数字图像数据的照相机(例如电荷耦合设备)。图像捕获部分也可以是将x射线直接转换为数字图像数据以形成图像的数字设备,从而潜在地避免了由于首先转换为可见光而引起的失真。
54.可由成像设备80拍摄的二维和/或三维荧光镜图像数据可以被捕获并存储在成像设备控制器96中。还可以捕获和组合由成像设备80获取的多个图像数据以提供患者30的整个区域的更大视图或图像,而不是仅针对患者30的一部分区域。例如,患者30的脊柱的多个图像数据可以附加在一起,以提供脊柱的完整视图或完整的一组图像数据。
55.然后可将图像数据从图像设备控制器96转发到计算机系统110的选定工作站。工作站110可以包括导航系统26或者是其一部分。工作站110可包括可以是导航计算机和/或处理器系统114的处理器系统或模块。工作站110还可包括显示器84和用户界面118和/或存储器模块或系统120。还可以理解,图像数据不一定首先保存在控制器96中,也可以直接传送到工作站102。工作站102可以提供设施,该设施用于在显示器84上将图像数据显示为图像130并且用于保存、数字处理或打印接收的图像数据的硬拷贝图像。可以是键盘、鼠标、触摸笔、触摸屏或其他合适设备的用户界面118允许使用者72提供输入,以经由图像设备控制器96控制成像设备80或调整显示器84的图像设置。工作站102还可以指示图像设备控制器96调整成像设备80的图像捕获部分,以获得沿不同平面的各种二维图像,从而生成具有代表性的二维图像数据和三维图像数据。
56.导航系统26可包括跟踪系统,该跟踪系统包括电磁(em)定位器94和/或光学定位器88中的一者或两者。跟踪系统可以包括控制器和接口部分110。控制器110可以连接到处理器部分114,该处理器部分可以包括包含在计算机内的处理器。em跟踪系统可以包括由在科罗拉多州路易斯维尔设有营业地点的美敦力导航公司销售的axiem
tm
导航系统;或可以是以下专利中描述的em跟踪系统:2010年7月6日发布的名称为“用
于外科手术导航的方法和装置(method and apparatus for surgical navigation)”的美国专利申请序列号7,751,865;1999年6月22日发布的名称为“位置定位系统(position location system)”的美国专利号5,913,820;以及1997年1月14日发布的名称为“用于导航导管探针的方法和系统(method and system for navigating a catheter probe)”的美国专利号5,592,939;所有这些专利以引用方式并入本文。应当理解,导航系统26还可以是或包括任何适当的跟踪系统,包括具有光学定位器和/或em定位器的或包括任何适当的跟踪系统,包括具有光学定位器和/或em定位器的s7
tm
和/或s8
tm
跟踪系统,其可用作光学定位器88,并且由位于科罗拉多州路易斯维尔市的美敦力导航公司出售。1999年11月9日发布的标题为“导管定位系统和方法(catheter location system and method)”的美国专利号5,983,126中阐述了另外的代表性或替代性的定位和跟踪系统,该专利在此通过引用并入本文。导航系统26可以是包括来自各种跟踪系统的部件的混合系统。
57.其他跟踪系统包括声学系统、辐射系统、雷达系统等。跟踪系统可以根据在上面结合的参考文献中的通常已知的或描述的技术来使用。除非阐明主题公开的选定操作,否则本文将不包括细节。
58.有线连接件或物理连接件可以互连跟踪系统、成像设备80等。另选地,与直接耦合到控制器110不同,各个部分例如器械68可以采用无线通信信道,例如在2002年11月5日发布的名称为“外科手术通信电源系统(surgical communication power system)”的美国专利号6,474,341中公开的,该专利通过引用并入本文。此外,跟踪设备58、62、66可生成由定位器88、94感测的场和/或信号。在各种实施方案中,器械跟踪设备66和/或其他适当的跟踪设备可如本文所讨论的那样经由有线通信或无线信号134与控制器110和/或阵列94通信。此外,包括成像系统80和/或跟踪系统的各种部件中的任一者可经由有线、无线或它们的组合的通信系统传输信号。在各种实施方案中,阵列94可通过扩散频谱信号操作以与跟踪设备66通信。
59.导航系统26的各个部分,例如器械68,以及下面将详细描述的其他部分,可以配备至少一个并且通常是多个的跟踪设备66。该器械还可包括多于一种类型或形态的跟踪设备66,例如em跟踪设备和/或光学跟踪设备。器械68可包括能够在近侧端部被抓握和/或操纵的部分(即,可操纵部分),并且跟踪设备可固定在器械68的可操纵部分附近。然而,应当理解,跟踪设备也可放置在器械68的远侧或干预端部处。
60.根据各种实施方案,导航系统26可用于相对于患者30跟踪器械68。器械68可通过跟踪系统来跟踪,如本文所讨论,诸如通过跟踪和确定跟踪设备66的姿势。患者30或适当对象的图像数据可用于帮助使用者72引导器械68。然而,图像数据被配准到患者30。图像数据限定了图像空间,该图像空间配准到由患者30限定的患者空间。可以如本文所讨论的那样自动地、手动地或它们的组合来执行配准。
61.通常,配准允许相对于图像数据的图像空间生成器械68的物理姿势的映射(也称为配准映射)。映射允许器械68的跟踪姿势相对于图像130显示在显示设备84上。应当理解,显示设备84可以是任何适当的显示设备,或者包括多于单个显示设备,诸如包括增强现实查看器、头戴式显示器等。图形表示68i(也称为图标)可用于示出器械68相对于图像130的姿势(例如,三维坐标位置和一个或多个自由度取向)。
62.对象配准系统或方法可使用对象跟踪设备58。跟踪设备58可包括可跟踪的部分或构件,但也可用作基准点组件或能够作为基准点组件操作。基准点组件可以包括夹具或其他固定部分134和可成像基准点主体。然而,应当理解,构件可与跟踪设备58分开。可提供固定部分134以固定任何适当的部分,诸如解剖结构的一部分。如图1所示,基准点组件120可以与脊柱的一部分(诸如对象30的棘突)互连。
63.固定部分134可以任何合适的方式与棘突互连。例如,可以将销钉或螺钉驱动入棘突中。另选地或除此之外,可提供夹具部分作为连接部分134以互连棘突。基准点部分可以用成像设备80成像。然而,应当理解,对象的各个部分(例如棘突)也可以用作基准点部分。
64.在各种实施方案中,当基准点部分用成像设备80成像时,生成包括或识别基准点部分的图像数据。基准点部分可在图像数据中自动(例如通过执行程序的处理器)、手动(例如通过选择使用者72的标识)或它们的组合(例如通过选择种子点的使用者72的标识和由执行程序的处理器执行的分段)进行识别。自动可成像部分识别的方法包括在2012年4月3日发布的美国专利号8,150,494中公开的方法,该专利通过引用并入本文。手动识别可包括选择图像数据中的元素(例如像素)或区域,其中可成像部分已被成像。无论如何,在图像数据中识别的基准点部分可用作基准点或基准点位置,该基准点或基准点位置可用于将图像数据或图像数据的图像空间与患者空间配准。
65.在各种实施方案中,为了将图像空间或坐标系配准到另一个空间或坐标系,例如导航空间,然后可以适当的方式在由对象30限定的对象空间中识别在图像130中识别的基准点部分。例如,如果基准点部分在获取图像数据以生成图像130期间在相同位置附接到对象30,则使用者72可以相对于对象30移动器械68,以接触基准点部分。应当理解,如上文在各种实施方案中所讨论的,基准点部分可以附接到对象30和/或可以包括对象30的解剖部分。另外,跟踪设备可以被并入基准点部分中,并且它们可以在获取图像之后与对象30一起保持。在这种情况下,可以在对象空间中进行基准点部分的配准或识别。然而,根据各种实施方案,使用者72可以移动器械68以接触基准点部分。
66.根据各种实施方案,跟踪系统可由于附接到器械68的跟踪设备66而跟踪该器械的姿势。这允许使用者72在导航空间(其可包括或可以是对象空间的一部分)中识别在图像130中识别的基准点部分的姿势(包括例如六个自由度信息,其包括定位和取向)。在识别基准点部分在导航空间中的位置之后,可以在导航空间中由对象30限定的主题空间与由图像130限定的图像空间之间进行映射。因此,如本文进一步讨论的,相同或已知位置允许配准。
67.在配准期间,在诸如图像130等的图像数据的图像数据坐标系与由患者30限定的患者空间之间确定映射。一旦发生配准,器械68就可以用配准到图像数据的跟踪系统进行跟踪,以允许将被跟踪器械68的姿势识别和图示为叠加在图像数据上的图标。图像130(或任何选择的图像数据)到对象30的配准可以在任何适当的时间发生。
68.在各种实施方案中,图像空间130和由对象30定义的对象空间可根据任何适当的方法来配准。如上所讨论,图像到患者的配准可包括获取和/或访问具有基准点的对象(诸如对象30)的图像数据(例如,来自在其上存储有图像数据的存储器系统)。对象30的图像数据可以是任何适当的图像数据,诸如用成像系统80获取的图像数据。此外,如上所讨论,基准点可以包括基准点部分和/或对象30的适当解剖部分。例如,基准点部分可以包括解剖结构的部分,诸如对象30的棘突。然而,所获取的图像数据可以在其中包括基准点。一旦获取
了具有基准点的对象的图像数据,图像空间中的基准点的识别就可发生。
69.也如上文所讨论的,可以发生图像空间中的基准点的识别。例如,可以在限定图像空间的图像数据中进行基准点的自动识别,诸如通过图像内基准点部分的自动分割。还可以使用手动识别和/或组合手动和自动识别来确定图像空间中的基准点。该组合可包括使用者72将一个或多个像素识别为种子像素以及处理器基于种子像素执行分割程序。
70.如上所讨论,对象空间和/或导航空间中的基准的识别根据通常已知的技术发生。对象空间可以与导航空间共同扩展和/或可以重叠。通常,导航空间是可以用跟踪系统诸如定位器94跟踪的体积,并且可以包含对象或患者30的全部或一部分。导航空间中的基准点的识别可以以各种方式发生,诸如相对于基准点部分(其也可以是跟踪设备)和/或棘突移动可跟踪器械诸如器械68。导航系统26的跟踪系统可以跟踪器械68,并且导航系统26可以包括用于输入导航空间中的基准点部分的部分的输入端。然后可使用导航空间中的基准点的姿势的确定或识别(例如,包括以包括三维位置和取向的选定自由度信息),以便形成两个或更多个坐标系之间的映射。
71.映射的确定可以是图像空间的坐标系相对于对象和/或包括对象30与导航空间的坐标系的相关性或与其的配准。映射允许将导航空间中的跟踪部分的确定姿势映射到图像中的等效或相同姿势。一旦确定了映射姿势,诸如通过将图标68i叠加在图像130上或通过该图标相对于该图像的叠加,就可以相对于图像130用显示器图示或显示姿势。
72.在将图像空间配准到患者空间之后,可以相对于图像130跟踪器械68。如图1所示,图标68i可表示器械68的姿势(其可包括六自由度姿势(包括三维位置和三自由度取向)),该姿势可相对于图像130显示在显示器84上。由于图像空间到患者空间的配准,图标68i相对于图像130的姿势可以基本上识别或模拟器械68相对于患者空间中的患者30的姿势。如上所述,这可以允许导航过程发生。
73.如上所讨论,成像系统80可包括各种部分,诸如源86和检测器88。在各种实施方案中,源86可包括一个或多个单独的源,诸如第一源200、第二源204和第三源208。三个源元件或部分200-208中的每一者可定位在源组件86内。因此,源86可以被理解为包括多个单独的源部分的源组件,该多个单独的源部分可将来自源组件86的x射线或能量从单独的源部分200-208中的每一者发射到检测器88。
74.检测器88可以是任何适当的检测器并且可被提供为单个检测器或单个检测器单元。检测器88可具有选定的尺寸212,诸如约300平方厘米(cm2)至约1600cm2,包括约450cm2至约900cm2,并且还包括约625cm2或任何适当的尺寸。通常,检测器88可具有小于对象30的对象尺寸216的尺寸。然而,可通过将能量锥诸如x射线从多个源部分200-208中的每一者引导到检测器88来对对象30进行成像。
75.例如,如图2所示,第一源200可生成或发射例如第一锥体220中的x射线以投射在检测器88上。第二源204可发射例如第二锥体224中的x射线以投射在检测器88上。第三源208可发射例如第三锥体228中的x射线以投射在检测器88上。每个锥体220-228可穿过对象30的不同部分并到达检测器88。如图2所示,这些锥体中的每一者可穿过对象30的不同部分,并且允许对象的至少一部分通过锥体220和228重叠,以允许重建对象30和/或对象30的至少感兴趣区域30a的整个或基本上整个图像。
76.源组件86和检测器88可相对于对象30移动,诸如通常在机架82内,或者利用其他
适当的移动机制,诸如对象30周围的区域或体积。如图2所示,例如,包括源组件86和检测器88的图像获取部分可大致移动到与源组件86的该第一位置或第一位置基本上正交或成90度的位置。然而,还应当理解,源组件86和检测器组件88通常可围绕对象30在双头箭头230的方向上移动。此外,成像系统80可大致沿对象30的长轴234并且大致沿与基本上正交于对象30的长轴234的轴线238或平行于该轴线相对于对象移动机架82。应当理解,成像系统也可平行于两个轴234、238移动。此外,机架82可大致围绕轴线238移动,诸如在双头箭头242的方向上移动,并且相对于对象30处于适当的位置。因此,源组件86可相对于对象30在多个位置和/或运动中移动,以获取对象30的图像数据。
77.在各种实施方案中,图像源200-208可由“热”发射源形成,诸如包括旋转或非旋转阳极的热发射灯丝源。热发射灯丝源包括诸如由在犹他州盐湖城设有营业地点的万睿视影像公司销售的rad-99b的那些。源200-208还可形成为基本上小的源或点源,诸如冷发射源,包括由在澳大利亚阿德莱德设有营业地点的micro-x有限公司销售的各种成像平台中使用的那些。因此,应当理解,包括单个源200-208的源可以适当的方式组装到源组件86中。然后可相对于对象30移动源组件86以获取对象30的图像数据。例如,可操作单独的源以发射穿过对象30和/或被其衰减的x射线锥。然后,检测器88检测穿过对象30和/或被其衰减的x射线以生成图像数据。x射线的衰减可包括吸收、偏转、反射等。因此,衰减可包括改变和/或阻挡x射线穿过对象30和检测器88。
78.在各种实施方案中,如图3所示,源组件86可包括源外壳或构型280,其可容纳或包围多个单独的源或源点,诸如包括第一源284、第二源286、第三源288、第四源290和第五源292的五个源。源284-292中的每一者可定位在外壳280内。
79.此外,源可以选定的构型定位在外壳280内,例如大致沿弧296。弧296可大致围绕对象30,并且可例如以对象的长轴234为中心。然而,应当理解,弧296可由相对于对象30的任何适当几何形状形成,如本文进一步讨论的。
80.源284-292中的每一者可生成从相应源284-292到检测器88的x射线束或发射。例如,第一源284可发射第一束300,第二源286可发射第二束302,第三源288可发射第三束304,第四源290可发射第四束306,并且第五源292可发射第五束308。束300-308中的每一者可穿过对象30和/或对象的至少感兴趣区域30a并到达检测器88。
81.然而,应当理解,在各种实施方案中,例如由于束成形、检测器88相对于源组件86的位置或其他构型,相应束300-308的仅一部分可投射或到达检测器88。同样,检测器88可包括尺寸212,其可以是小于对象和/或感兴趣区域30a的尺寸216的尺寸。然而,由于各种源284-292的定位,相应的锥体300-308可穿过感兴趣区域30a的全部或基本上全部体积以及单个位置和/或在源组件86的移动期间。例如,如图3所示,源组件86可移动到第二或另选位置86',检测器88'也可这样。如上所讨论,应当理解,包括源组件86和检测器88的成像部分可以一个或多个运动相对于对象30移动,如上所讨论。
82.在各种实施方案中,如本文进一步讨论的,成像系统80可包括选定数量的多个源或多源。如本文进一步讨论的,源组件86中可包括各种数量的源,用于生成多个x射线束或发射部分(例如,扇形、锥形或其他适当形状)。发射中的每一者可穿过或相对于对象30和/或感兴趣区域30a,并在检测器88处被检测以用于生成图像数据。图像数据可用于生成可用显示设备84和/或任何其他适当的显示设备显示的图像130。
83.参考图4a、图4b和图4c,成像系统80可包括机架82或任何适当的支撑结构,用于成像源组件86和检测器88的操作或移动。首先参考图4a,成像系统80可包括源组件86,以具有五个源部分或点284-292,如上所讨论。源点可跨越选定的距离,诸如弧330。弧330可具有约10度的角距离,包括约8度至约12度。角距离330可允许包括源284-292的源组件86对具有约210毫米(包括约200毫米至约220毫米)的边缘尺寸334的体积进行成像。因此,可成像体积可以是约9升,包括约8升至约11升。
84.如上所述和讨论,由于束300-308的锥形发射或锥体发射,可生成或允许体积的成像。因此,源284-292的角跨度330允许对选定体积338的成像。由于锥体300-308穿过整个体积338,由源组件86成像的体积可允许生成整个体积338的图像数据。在各种实施方案中,例如,锥体可穿过体积并且对每侧具有约边缘尺寸334的至少二维区域的部分进行成像。因此,在角尺寸330处包括源可允许对大于源组件86的尺寸或体积的体积338进行成像。
85.转向参考图4b,成像系统80可包括机架或包括成像组件86的其他适当支撑结构。成像组件86可包括可被编号为350、352、354、356、358、360、362、364、366和368的多个源部分或源点。十个源350-368可各自发射x射线的选定锥体或束,其示例性地示出为来自第一源350的第一束370和来自第十源368的第二束374。应当理解,源350-368中的每一者可发射选定的束,并且对于当前讨论仅示出了第一束370和最后束374。源350-368可被定位成跨越约20度(包括约18度至约22度)的角距离或弧380。因此,角距离380可以是角距离330的约两倍大。
86.角距离380和增加数量的十个源350-368可允许对具有约260毫米(包括约258毫米至约262毫米)的侧尺寸384的感兴趣区域或面积进行成像。尺寸384可以是正方形面积的尺寸和/或立方体体积的侧面的尺寸。立方体体积可包括体积390,由于相应束370-374的几何形状,该体积可由十个源350-368在选定位置处成像。如上所讨论,束可基本上是锥形的,并且因此通过体积390到检测器88成像以对体积390进行成像。因此,体积390可包括约17.6升的体积,包括约16升至约19升。因此,十个源350-368的角尺寸380可允许对比体积338大如上所讨论的约1.8至约2.2倍的体积390进行成像。
87.再次,如上所讨论,包括源组件86和检测器组件88的成像系统可相对于体积390移动。体积390可包括对象30或者相对于其定位,以用于对对象30的至少一部分进行成像。因此,体积390可包括或限定对象30的待成像的感兴趣区域。此外,如上所讨论,各种锥体诸如第一锥体370和最后锥体374可重叠以在相对于体积390和检测器88的不同视角处对体积390的相同部分进行成像,以确保整个体积390和/或在不同视角处的图像数据的获取,如本文进一步讨论的。
88.参考图4c,成像系统80可包括源组件86。在各种实施方案中,源组件86可包括十五点或多源发射器,包括单独的发射器400、402、404、406、408、410、412、414、416、418、420、422、424、426和428。十五个源400-428中的每一者可发射能量束,诸如x射线,类似于如上所讨论的(例如锥形)。参考图4c,为了简化当前讨论,示出了三个锥体。因此,第一锥束430可从第一发射器400发射,第二锥束434可从第八源414发射,并且第三锥束438可由第十五源428发射。
89.继续参考图4c,因此,在各种实施方案中,源400-428中的每一者可在选定角度跨度442内彼此等距间隔开。角跨度442可以是约30度,包括约28度至约32度。角跨度482可允
许十五个源400-428的分离,其中中心源414分别距两个端部源400-428相等距离。角跨度442可允许相应的束430、434、438从源组件860发射并且穿过感兴趣区域并由检测器88检测。
90.角跨度442可允许束(例如两个端部束430、438)穿过在一侧上具有尺寸450的区域。尺寸450可以是正方形面积的侧面和/或立方体体积的侧面的尺寸。尺寸450可以是约310mm,包括约308mm至约312mm。因此,尺寸450可允许对约29.8升(包括约28至约31升)的体积454进行成像。因此,体积454可限定感兴趣区域或者用于对对象30的感兴趣区域进行成像。由十五个源400-428的角跨度442生成的体积454可通常比由角尺寸330限定的体积338大约320%(包括大约300%至大约340%),如上所讨论。
91.因此,角尺寸442(即,约15度)可允许对体积454进行成像,该体积可显著大于较小的角尺寸。此外,包括十五个源400-428的多个源允许对整个体积454进行成像,如图4c所示,其中来自单独源中的每一者或源400-428中的选定一者的发射在检测器88处被检测。如图4c所示,三个源400、414、428可对其中包括重叠发射区域的整个体积454进行成像。因此,十五个源400-428可对体积454和/或由尺寸450限定的面积进行成像以获取对象30的图像数据,如本文进一步讨论的。
92.转向参考图5,示出了根据各种实施方案的成像系统80。成像系统80可包括源组件86和检测器88。如上所讨论,源组件可包括任何适当数量的源部分,诸如如图2所示的三个源部分,或者例如如图4c所示的多个源部分。然而,参考图5,对于当前的讨论,源组件86可包括三个源部分200、204、208。源部分可以适当的形状或几何形状发射能量扇或能量锥,诸如x射线。如上所讨论,几何形状可包括基本上锥形的形状,诸如锥体224。然而,可以适当的方式改变发射或束的几何形状,诸如利用包括滤波器、导向器等的束形成系统。因此,在各种实施方案中,发射的束可包括束形状,诸如来自第一源部分的束470和诸如来自第三源部分208的束474。
93.束形状可包括一般的三角形扇,诸如直角三角形扇,或其他截头圆锥形。例如,第一锥体470可以是大致直立或接近直立的截头圆锥形,包括可基本上垂直于检测器的表面88a的第一腿部480和可相对于检测器表面88a以锐角484延伸的第二腿部482。然而,应当理解,两个腿部480、482可不完美地限定某些角度,如上所讨论,并且该形状可以是大致非锥形形状。类似地,第二束474可包括可大致垂直于表面88a的第一腿部488和可相对于检测器的表面88a以锐角492延伸的第二腿部490。如上所讨论,第二发射器204的束224可基本上是锥形的。
94.因此,如图5所示,三个锥体或束470、224、474可大致覆盖整个感兴趣区域496。来自离散发射部分200-208的束470、224、474的成形可允许对感兴趣区域496进行成像,如图5所示。此外,如上所讨论,源组件86通常可相对于感兴趣区域496围绕中心(诸如等中心)移动,如上所讨论。因此,源组件86和检测器组件88可移动以在相对于感兴趣区域496的不同位置处获取图像数据。因此,作为感兴趣区域496的获取的体积或面积可大于利用单个源点获取的体积或面积。
95.此外,源组件86可相对于检测器88关于通过感兴趣区域496的中心大致对称地定位。例如,从检测器88的表面88a延伸的垂直线或轴线500通常可延伸穿过中心曲面点204。两个端部或边缘源部分200、208中的每一者可诸如沿弧与中心源点204基本上等距。包括多
个源200、204、208的源组件86可相对于检测器88基本上对称地形成或定位。包括相对于检测器88对称定位的源组件86可允许获取感兴趣区域496的图像数据。
96.参考图6a和图6b,在成像系统80中相对于检测器88示出了成像源组件86。如上所讨论,检测器88可包括上检测表面88a。检测器表面88通常可以是平面的或基本上平面的,使得法线或轴线500可相对于其限定。通常,轴线500可从检测器表面88a的中心延伸。因此,射线或束可基本上沿轴线500从源投射并由检测器88检测。
97.源组件86可相对于检测器定位,例如,如图5所示,其中源200-208基本上围绕轴线500对称。然而,在各种实施方案中,如图6a和图6b所示,检测器组件86可包括相对于检测器88和轴线500基本上非对称或反对称地定位的15个源部分400-428。通常,反对称源组件包括源部分,使得多个源部分中的第一数量的源部分定位在从检测器延伸的线或平面的第一侧上,并且多个源部分中的第二数量的源部分定位在从检测器延伸的该线的第二侧上,使得第二数量大于第一数量。
98.例如,如图6a所示,第三源点404可基本上定位在轴线500上。因此,源点404可大致定位在轴线500上,并且大致垂直于检测器表面88a发射辐射。如上所讨论,由源404发射的束504可基本上是锥形的。第一源400可从轴线500偏移选定的角度,例如约5度的角度508。因此,第一源400可发射不是规则锥体形状的束,或者至少包括接触表面88a的规则锥体。因此,第一源400可被定位在与垂直于表面88a的中心入口500成一角位移处。
99.继续参考图6a且另外参考图6b,第十五光源428可发射束510。如上文在图4c中所讨论的,束510可与束438不同或包括不同的几何形状。由源发射的各种束可包括不规则的锥形几何形状。由于与源组件86相关联的选定滤波器或束成形组件,可形成不规则的锥形几何形状。此外,束510可包括基本上规则锥形的束部分,但包括接触检测器88或由其检测的截头圆锥形部分。
100.因此,包括检测器表面88a的检测器88可具有从其延伸的中心轴线500。第十五源428可相对于中心轴线500成约角度512。因此,源组件86可以是基本上反对称的,因为第一源400偏离中心轴线500约5度并且第十五源528偏离中心轴线500约25度。因此,15个源不是相对于中心或垂直轴线500对称放置的,而是相对于其偏移。因此,由第十五源428发射的束510可以是朝向检测器表面88a检测或发射的大致非锥形或截头圆锥形形状。
101.如图6a和图6b所示,因此,在选定的新位置处通过其可发射束的体积或面积可以是尺寸520。尺寸520可以是大致规则形状的正方形面积或立方体积的侧尺寸。然而,应当理解,尺寸520可以是适当的边缘尺寸。然而,尺寸520可以是体积524,其可被定义或操作为成像系统800的感兴趣区域。因此,体积524可以是约64升,包括约62升至约66升。因此,可为约400毫米(包括约380毫米至约410毫米)的尺寸520可允许对成像系统80内的选定体积524进行成像。
102.如上所讨论,成像系统80还可被操作以通过成像系统80的选定部分的移动对体积524内的对象30进行成像。例如,反对称源组件86可围绕体积524旋转,诸如在机架82内基本上每年旋转一次,以确保来自源点400-428的束穿过体积524以由检测器88检测。因此,源组件86也可以各种构型或形状移动,如上所讨论,以允许体积524的图像数据获取。对象30可完全定位在可成像体积524内或至少部分定位在其中,以允许通过操作成像系统80来获取对象30的图像数据。
103.继续参考图6b,例如,源组件86'和检测器组件88'可相对于图6b所示的初始位置(实线)旋转约90度(如虚线所示)。第十五源428'可发射束510'以包括与束510基本上类似的几何形状,如上所讨论。束510'可由第十五源428'发射并且在检测器表面88a处被检测。轴线500基本上从中间延伸并垂直于检测器表面88'a,并穿过或相对于源组件86'的一部分。第十五源428'可定位在相对于轴线500的角距离512处。因此,即使当相对于第一位置旋转时,第十五源428'也能够相对于检测器88定位,如图6b所示。因此,源组件86'可在相对于体积524的选定位置处获取体积524的图像数据,所述选定位置包括该源组件86'相对于初始或第一位置的基本上正交位置和/或其他适当角位移。
104.转向参考图7a、图7b和图7c,成像系统80可包括如上所讨论的源组件86,其包括多个源部分或多源部分。如图7a和图7b示例性所示,源组件86可包括三个源部分200-208。如上所讨论,相应源部分200-208中的每一者可生成锥形和/或截头圆锥形束。因此,例如,源200-208可发射束470-474,如上所讨论。根据各种实施方案,束470-474可利用适当的滤波器或束形成部分成形。因此,源组件86也可在机架82内移动,如上所讨论。
105.在各种实施方案中,源组件86可基本上居中或定位在机架82的第一边缘或端部550与机架82的第二端部554之间的中间。机架82可在两个端部550-554之间限定体积,诸如基本上总的体积。这两个端部可沿可延伸穿过机架82的中心轴线或长轴558大致间隔开。轴线558可以是机架82的大致z方向或移动,并且可与对象的长轴234大致对准或平行。因此,机架82通常可包括或具有选定尺寸的深度562,诸如约0.5米至约2米。该深度可允许各种部件的定位,诸如在机架82内的源组件86和检测器组件88。还可在机架深度562内提供各种电子器件和其他机构。
106.进一步参考图7c,源200-208可在与机架82的一侧或两侧550-554平行和/或基本上垂直于穿过机架82的轴线558的平面中对准。因此,源200-208可放置在平面上并且沿弧或作为在机架82内的平面上的圆的一部分的弧。这些源中的每一者从机架82内的相同平面并且基本上垂直于中心轴线558向探测器88发射来自相应源200-208的相应束470-474。因此,源200和208可位于以中心轴线558为中心的圆570上。
107.再次,源组件86和检测器组件88可围绕轴线558旋转,以获取感兴趣区域或体积(诸如机架82内的体积524)的图像数据。这可允许源组件86和检测器组件88在机架82内移动。此外,如上所讨论,机架82可相对于对象30移动,诸如通过相对于推车103相对于对象30的移动。
108.在各种实施方案中,源组件86可在机架82内旋转,或者利用任何其他适当的保持或安装系统旋转,以获取体积524的图像。因此,可利用由源组件86内的一个或多个源发射的一个或多个束来对体积524成像。由于源组件86和相关检测器88在机架82内的旋转,束可包围或覆盖体积524。如图所示,诸如在图7a和图7b中,束可以比体积524的其他部分更大的密度覆盖体积524的特定部分。例如,如果束是x射线发射,则体积524内的辐射的密度或量可能影响被成像的对象30的图像质量。
109.转向参考图8a、图8b和图8c,成像系统80可包括机架82,如上所讨论。如上文进一步讨论的,成像系统80可包括检测器88和源组件86。源组件可包括任何适当数量的源,诸如三个源200-208,如上所讨论。然而,应当理解,源组件86还可包括任何适当数量的源,包括15个源400-428,如上所讨论。三个源200、204、208的讨论和说明是为了当前讨论的容易和
清楚。因此,如图8a所示,源组件86可包括三个离散或单独的源200-208,其可发射三个束,包括来自第一源200的第一束570、来自第二源204的第二束574和来自第三源208的第三束578。三个束570-578可被导向检测器88,诸如其检测器表面880。如上所讨论,检测器88可具有基本上平面的检测器表面88a,并且可限定基本上垂直于其延伸的轴线或线500。
110.源组件86可定位在机架82内并且相对于检测器88定位,使得源组件86和/或延伸穿过源200-208的至少一条线或弧582不平行于与延伸穿过机架82的轴线558垂直的平面和/或源组件86在机架82内的旋转方向或路径。如上所讨论,源组件86可在成像系统80中的环形路径或圆形路径中移动。在各种实施方案中,机架82可包括导轨或其他系统,以允许或引导源组件86在机架82内的路径。源组件86的路径可大致是基本上圆形的,诸如大致沿圆形路径586。线或弧582可与机架82内的路径或圆586相交。此外,如图8c所示,穿过源组件86(包括穿过源200-208)的线582可延伸穿过机架82的外表面或平面或与其相交。
111.在各种实施方案中,第一源200可比第二源204和第三源208中的任一者或两者更靠近一侧,诸如第二侧554。第三源208可比第一源200和第二源204中的任一者或两者更靠近相对侧,诸如机架82的第一侧550。第二源204可在第一源200和第三源208中的任一者相对于机架82的两侧550、554中的任一者的距离之间。因此,如图8a-图8c所示,源200-208可被定位成延伸出圆形路径或限定机架82内的平面的路径。因此,相对于机架的第二侧,一定数量的源可比某些其他源更靠近一侧。因此,如图8a所示,由每个源发射的束可包括可与体积524相交的不同部分或部件,该体积可用检测器88的源组件86成像。
112.继续参考图8a至图8c,但特别参考图8c,源200-208的离轴或倾斜取向(诸如沿线582)可将源定位成诸如以更大的强度对体积524相对于检测器88的不同部分成像。如图8c所示,例如,可发射束570的源200可具有中心或最高强度部分570',其可穿过第一区域590中的检测器88并由其检测。发射束574的第二源204可包括较高密度或中心区域574',其可在区域594处撞击或到达检测器88。最后,发射束578的第三源208可包括较高密度或中心区域578',其可在区域598处到达检测器88。因此,来自相应源的各种束可到达检测器,其中束在不同区域处集中在检测器88上。因此,当源组件86在机架82内的路径中扫过或移动时,可成像体积(诸如体积524)的更多或更大的区域可能受到影响或能够衰减来自源200-208中的一者或多者的束的高强度或高密度区域。
113.源组件86在成角度时可移动到第二源位置86'(虚线),如图8c所示。因此,源组件86可包括沿线582的源200-208,该线基本上沿与机架82内的运动路径或圆586不平行的线或平面。
114.继续参考图7a-图7c和图8a-图8c,在各种实施方案中,成像系统80可进一步操纵或移动源组件86。应当理解,如上所讨论,源组件86可固定在单个选定位置,诸如大致与诸如在机架82内的旋转轴线或旋转平面对准,或相对于其成角度。还应当理解,源组件86可定位在任何适当的位置,诸如基本上正交于移动或定位平面586,而不是简单地与其对准或相对于其成选定的锐角。
115.在各种实施方案中,参照图9a-图9d,源组件86也可相对于成像组件80的机架82选择性地移动。如上所讨论,机架82可以各种形式提供,并且通常可具有第一或前表面550和第二或后表面554。应当理解,机架82可以是选定的形状,诸如c形、o形或其他适当的形状。此外,如上所讨论,机架可包括诸如成像系统的可开口或可破裂的机架。然而,源
组件86可定位在机架82内的选定结构上,诸如导轨600。导轨600可承载一个或多个部件,诸如源组件86。如上所讨论,源组件86可在两个端部诸如第一端部610和第二端部614之间延伸。源,诸如三个源200、204和208,可定位在源组件86内或与其保持在一起。应当理解,源组件86可包括任何数量的源,包括上文讨论的那些。
116.源组件86可诸如围绕对象30在转子或导轨600上或与其一起移动,如上所讨论。源组件86可大致以弧形移动,诸如以弧形或角运动586移动。运动或路径586允许源组件86围绕对象30旋转或移动,诸如用于在相对于对象30的各种位置处获取图像数据,如上所讨论。然而,源组件86也可相对于转子或导轨部分600移动。
117.在各种实施方案中,例如,源组件86可围绕轴线620旋转。轴线620可延伸穿过源组件86,并且诸如穿过轮轴或销624。轮轴624可相对于驱动组件或系统628安装或保持源组件86。驱动组件628可包括各种部分或系统,诸如电动马达,其可包括用于移动源组件86的单独马达或选定的单独马达。
118.驱动组件628可被供电和控制以使源组件86围绕轴线620旋转,诸如大致在双头箭头632的方向上。因此,源组件被理解为能够相对于或围绕轴线620在任一或两个方向上旋转。因此,源组件86可从在两个端部610、614之间与移动路径或平面586基本上对准的位置旋转,如图9b所示。
119.驱动组件628可由控制组件96操作或控制,以移动或控制源组件86的移动。如上所讨论,成像系统可相对于对象30移动,包括机架82沿或相对于z轴或长轴234和/或竖直轴线238相对于对象30的移动,并且还可相对于选定轴和/或推车103旋转或倾斜,诸如在双头箭头242的方向上。因此,源组件86也可与成像系统80的其他部分(诸如机架82和/或转子600)的移动一致地移动(例如同时地和/或相对于其以选定的时间延迟)。因此,源组件86可定位到选定位置和/或在转子600围绕对象30旋转时围绕轴线620旋转,诸如大致在平面或双头箭头586的方向上。
120.继续参考图9a和图9b,并且另外参考图9c和图9d,源组件86可被旋转使得它基本上垂直于方向或移动平面586。如上所讨论,源组件86可在端部610、614之间延伸,诸如大致沿长轴616延伸。源组件86的长轴616可与移动轴线或平面586成一直线或平行。然而,如图9c和图9d所示,源组件86的长轴616也可基本上垂直于或正交于轴线或平面586。因此,源组件86可在双头箭头632的方向上围绕轴线620移动,以将源组件86定位或移动到基本上正交于移动平面或轴线586的位置。应当理解,源组件86可定位在对准位置与正交位置之间的任何位置,如图9a和图9c所示。源组件86还可围绕对象30旋转和/或在源组件86围绕对象30旋转期间旋转。因此,分别如图9a和图9c所示的对准或正交位置的图示仅是源组件86的两个可能位置的示例。
121.当源组件86可由驱动系统628移动时,源组件86可根据选定指令(诸如由控制组件96执行的那些)自动移动。使用者72可选择一个或多个成像特征或特性。成像系统80然后可被操作以收集对象图像数据,用于生成(诸如重建)图像(诸如图像130),用于在显示设备84或其他适当的显示设备上显示。
122.继续参考图8a-图8c,并且另外参考图10,成像系统80可包括源组件86,该源组件包括一个或多个源,诸如三个源200、204、208。然而,应当理解,可在源组件86中提供任何适当数量的源,包括诸如以上讨论的那些。
123.如图10所示,源组件86可被定位成使得源200-208沿具有长轴582的线或弧对准。源组件86可在路径586中移动,诸如在机架82内移动。路径586通常可以是成角度的路径,诸如在机架82内是成角度的。然而,应当理解,路径或平面586可以是任何适当的路径,并且通常可由成像系统80的几何形状限定。然而,如图8b和图10所示,源组件86可被定位成穿过或延伸穿过机架82的两个表面或侧面550、554之间的平面586。
124.因此,如图10所示,成像组件可包括靠近第一侧550的第一源200和靠近第二侧554的第三源208。第二源204可定位在第一源200与第三源208之间,如图10所示。通常,尺寸630可限定在第一源200和第三源208之间,尺寸660可以是大致线性的尺寸,然而,应当理解,源可沿具有定位在源组件86的外部或限定在该源组件的外部的中心的弧或曲线定位。然而,尺寸660可限定两个源200、208的中心或边缘之间的线性尺寸,该线性尺寸可以或可以不延伸穿过任何其他源,诸如第二源204。
125.尺寸660可以是大于其他尺寸诸如检测器88的边缘尺寸664和/或感兴趣区域524的尺寸520的尺寸。如上所讨论,感兴趣区域524可以是感兴趣区域或可成像区域或体积。因此,尺寸520可以是限定感兴趣区域或图像或可成像体积524的立方体的一侧。然而,源200、208之间的尺寸660可大于尺寸664和/或520中的任一者。
126.相应的源可各自发射相应的束,诸如第一源200发射第一束570并且第三源208发射第三束578。如图8b所示,两个相应的束570、578可从相应的源200、208发射,并且穿过可成像体积524的选定部分并接触检测器88。束570、578可选择性地从源组件86发射和/或成形,以穿过体积524并接触检测器88或由其检测。应当理解,其他源也可发射不同的束,然而,对两个束570、578的讨论是为了当前讨论的清楚,并且其他源也可发射其他束以穿过体积524的其他部分。
127.如图8b和图10所示,第一束570可从源200发射,穿过体积524并由检测器88检测。束570可穿过体积524的第一部分670并且在检测器88处被检测。第三束578可穿过该体积的第二体积674并由检测器88检测。因此,两个束570、578可延伸或穿过体积524的不同部分和/或可重叠或都穿过选定的重叠区域678。可使用各种成像重建技术来生成或获取长度520的图像,诸如沿对象30的轴线234的轴向长度。尺寸520可大于检测器88的尺寸664。因此,大于检测器88长度的长度可在源组件86如图10所示定位的情况下被成像。类似地,体积524可用源组件86成像,该体积大于包括检测器88的尺寸664的体积。
128.因此,成像组件80可获取比检测器88的尺寸大的对象(诸如对象30)的图像数据。例如,通过体积524的单次通过或投影可收集长度为约20厘米(cm)至约30cm(包括约25cm)或沿其的长度的图像数据。该尺寸可大于在源组件与路径586对准的情况下可在单个投影中成像的尺寸,如图7c所示,该尺寸可为约10cm至约20cm,包括约15cm。两个投影可在具有约30cm的尺寸664(例如,侧尺寸)的检测器88上获取。因此,包括相对于路径或平面586定位的源200-208的源组件86的对准或定位可允许获取包括其尺寸大于由于源组件86与路径或平面586对准而允许的尺寸的投影。
129.转向参考图11,成像系统80可包括各种几何形状,如本文进一步讨论的。如上所讨论,成像系统80可包括机架82,该机架可以大致环形或“o”形构型定位。机架82可连接到推车103,该推车可允许成像系统80在两个不同位置中和在选定规程期间移动。在各种实施方案中,如上所讨论,成像系统80可包括一个或多个移动部分,诸如轮子107或多个轮子以根
据选择支撑推车103并移动成像系统80。如所理解的,机架82可包括固定或主要部分700和开口或可破裂部分704。固定部分700可在选定的位置和/或选定的固定点706处固定到推车103。因此,固定部分700通常可限定成像系统80的最小范围或尺寸。如上所讨论,成像系统80可包括源组件86和检测器组件88。
130.如图11中示意性地示出,源组件86和检测器组件88可固定或定位到转子720。转子720可在机架82内移动到各种位置。如上所讨论,成像系统80可允许源组件86和/或检测器88相对于可成像体积或对象30的移动。源组件86和检测器88可在选定位置和/或选定几何形状处固定到转子72。如图11所示,源组件86可相对于检测器88非对称地或反对称地定位。换句话讲,检测器88可包括检测器表面或面88a,轴线或线500从该检测器表面或面延伸。轴线500可基本上垂直于表面88a。然而,源组件86可被定位成使得大部分(诸如第一部分86a)利用转子720定位到一侧或选定侧,诸如相对于检测器88的内部弧。因此,可提供大的或开口区域以用于在机架82内接近对象30。
131.可破裂部分或开口部分704可相对于固定部分700移动。例如,门704可大致在箭头724的方向上移动以允许接近内部或在机架82内移动。源组件86利用转子720相对于检测器88的位置可允许大的开口,使得其可由两个线或平面734和738之间的角度730限定。角或弧形尺寸730可以是选定的尺寸,诸如约60度至约300度,包括约90度至约180度。转子720和相关联的源组件86和检测器组件88可允许机架82的开口区域,以便允许有效或容易地接近机架82内的用于定位对象30的区域。然而,成像系统80能够相对于对象30移动转子720,以获取相对于对象30的选定图像数据,如上并且在本文中进一步讨论。
132.源组件86(包括多个源部分,诸如15个源部分400-428)的定位可允许机架82包括各种部分,诸如允许打开弧730的门740。在对象30的图像数据的获取期间,诸如在选定规程期间,可以有效的方式使用打开或开口弧730。在各种实施方案中,成像系统80可利用推车组件103相对于对象30移动,并且转子720可用于相对于对象30移动选定的源组件86和检测器组件88以获取对象30的图像数据。
133.如上所讨论,成像系统80可包括源组件86和检测器88。源组件86和检测器88可利用转子720固定在相应位置中。然后,转子720可在机架82内移动,如上所讨论,例如如图11所示。此外,检测器组件88和/或源组件86可相对于转子720移动。例如,可提供导轨和马达系统以相对于转子720和/或相对于彼此移动源组件86和/或检测器组件88中的一者或两者。在各种实施方案中,检测器88可从如图11所示的第一位置移动到也如图11所示的第二位置88'(虚线)。检测器88'可检测由一个或多个源发射的x射线,诸如可发射将由检测器88'检测的束(例如锥束)760的源400。因此,可提供成像组件80以使其中的各个部分相对于彼此移动,以便对选定的对象诸如对象30进行成像。
134.此外,如上所讨论,源组件可包括多个单独的源。在各种实施方案中,源组件86可包括15个源部分或点400-428。可以针对对象30的各种成像技术的选定方式操作各种源点。换句话讲,根据各种实施方案,多个源部分中的不同源部分可在单个源组件中不同地操作。
135.在各种实施方案中,参考图12,可提供包括15个源400-428的源组件86,用于利用各种滤波器或滤波器组件对对象30进行成像。例如,如图12中示例性和示意性地示出,这些源中的选定源,诸如源点或部分400、406、412、418和422,可全部具有选定的滤波器770。滤波器770可被提供或具有选定的特征或特性以使用或增强选定的成像模态。例如,滤波器部
分770可以是能够操作的,以帮助对象的荧光镜成像。可通过包括诸如铝或铜的选定材料的滤波器组件和/或用于将x射线束聚焦到特定感兴趣区域的准直器来帮助荧光镜成像。因此,可相对于选定的源部分400、406、412、418、422以固定方式和/或可移动方式提供滤波器组件770,以帮助对象30的荧光镜成像。因此,滤波器组件770可用于增强或能够操作以增强相对于对象30的选定成像模态,以帮助对对象30进行成像。源组件86的其他源点不需要具有滤波器部分770,并且可提供选定的束,诸如宽的或宽光谱束。
136.此外,应当理解,在多个源400-428中,其他选定的源可包括单独的或不同的滤波器部分。例如,可在这些源中的选定源诸如源402、414和428上提供滤波器部分780。源部分780可帮助选定的成像模态,诸如成像系统80的双能量成像模态。在各种实施方案中,例如,滤波器组件780可帮助将来自源402的发射选择或限制到选定的光谱。来自另一个源(诸如源408)的发射可具有不同的能量。因此,两个源402、408可用于单源组件86中以帮助生成或收集对象30的双能量图像。
137.如上所讨论,源组件86可相对于对象30定位以用于对对象30进行成像。因此,两个源部分402、408可被供电或用于在接近的时间发射x射线,以确保或帮助在以两种不同能量获取图像数据之间具有基本上很少(例如,小于约0.1秒)的时间的情况下收集双能量图像数据。因此,可操作源组件86以获取对象30的双能量图像。
138.应当理解,各种滤波器部分770、780被示意性地示出,并且可被理解为包括任何选定类型的滤波机构或材料。此外,滤波器部分770、780可帮助准直或引导来自任何选定源的束。在各种实施方案中,滤波器部分770、780可包括选定材料诸如铅、铜或其他材料。此外,源部分可包括选定的形状,诸如窄缝、针孔等,以帮助选择或生成选定的束形状。
139.此外,源组件86可被操作以按选定顺序从选定源中的任何一者收集或发射。如本文进一步讨论的,源组件86可被操作以从源部分中的任何一者或多者同时地、顺序地或以选定的模式发射。在各种实施方案中,例如,当转子720围绕对象30旋转时,包括滤波器部分770的源可被顺序地操作,使得在任何一个发射/投影处仅使用源部分中的选定一者或多者的同时获取对象30的选定数量的投影。
140.另选地,或除此之外,在源组件86相对于对象30的基本上任何和/或每个位置处(例如,诸如在源组件相对于对象30的旋转中),可操作具有基本上类似特性的多个源。通过在源组件86的单个位置处利用这些源中的两者或更多者来获取对象的图像数据,可在源彼此偏移选定距离时进行对象的立体或透视获取。例如,源400与源406相距一距离790,尽管源400和406两者可包括基本上类似的发射特性或成像特性。此外,源406可与源712相距该距离790。源400可与源412相距一距离794。距离794可以是源412与源400之间的距离的两倍,线性地或成角度地。因此,在单个图像投影中,可以基本上类似但处于不同位置或视角的成像特性获取相对于对象30的不同透视图。
141.在各种实施方案中,可在源组件86相对于对象30的每个选定位置处基本上同时对每个源供电。如本文所讨论的,此类同时获取可允许在源组件86的单个位置处对对象30进行双视角图像或图像数据获取。双视角可允许配准到对象30的附加或其他图像数据。
142.继续参考图1-图12,并且另外参考图13a、图13b、图13c和图13d,示出了成像系统80。具体参考图13a至图13d,成像系统80被示意性地示出为包括可围绕机架82移动的源组件86。机架82被示意性地示出为仅包括内部环形部分,但应理解包括可包围或限定源组件
86可与检测器组件88一起移动通过的体积的环形部分。检测器组件88和源组件86可连接到转子,如上所讨论。此外,机架组件82可包括任何选定的构型,诸如“c”和/或“o”构型等。此外,成像系统80可包括如上所讨论的各种部分和特征,包括推车102、机架82的可破裂或开口部分或其他选定部分。然而,为了当前讨论的清楚,关于图13a-图13d的讨论包括成像系统80的示意性图示。
143.包括源组件86的成像系统80可包括例如包括源400-428的15个源点组件。在成像系统80的操作期间,源组件86可如上所讨论大致在路径586中并且在双头箭头810的任一方向或两个方向上围绕机架82移动。成像系统80的各个部分也可相对于对象30和/或推车103移动,并且因此双头箭头810的方向仅示出了源组件86在成像规程期间的一种可能的移动。同样,源组件86可沿着选定路径移动,诸如本领域技术人员所理解的,以获取对象30的图像数据。此外,检测器88还可相对于源组件86和/或与源组件86和机架82一起移动,以获取图像数据。在双头箭头810的方向上的选定移动同样是为了当前讨论的清楚。
144.因此,在各种实施方案中,例如如图13a所示,源组件86可相对于感兴趣区域或可成像体积524处于第一位置,例如大致沿参考或中心轴线818。应当理解,例如,机架82可相对于表面定位,并且参考轴线818在这里仅用于讨论目的。因此,如上所讨论,源组件86可相对于参考轴线818沿路径586在双头箭头810的方向上移动。在第一图像数据获取位置830中,如图13a所示,源组件86可相对于检测器组件88定位,并且源部分428可被操作以发射待由检测器88检测的x射线。如图13a所示,x射线可穿过选定的路径或形状,诸如穿过区域524的选定的锥体或锥束834,以由检测器88检测。
145.参考图13b,源组件86可相对于参考轴线818移动到第二或另选位置,探测器88也是如此。源组件86可沿路径586在双头箭头810的方向上移动到第二位置或如图13b所示的位置834中所示的选定另选多个位置中的一者。源组件86可移动任何适当的量,并且所示位置仅用于当前讨论。然而,在第二或另选位置834处,源点414可被操作以发射穿过体积524以在检测器88处被检测的x射线束和束842。束842可穿过体积524的不同部分和/或可与束834所穿过的部分重叠。然而,第二位置838可允许来自源组件86的不同的一个源(诸如源414)的束842中的x射线由检测器88检测。
146.转向参考图13c,源组件86和检测器88可定位在第三位置850中。第三位置850可使源点426发射穿过体积524以在检测器88处被检测的x射线锥854。同样,源组件86可沿路径586在双头箭头810的方向上移动到位置850,如图13c所示,以获取图像数据。在位置854中,源点426可被供电或操作以发射x射线,用于穿过体积524以在检测器88处被检测。如图13c所示,束854可穿过体积524的不同部分和/或与先前束中的任一者(诸如束834和842)的至少一部分重叠。
147.转向参考图13d,源组件86和检测器组件88可移动到第四位置860,如图13d所示。在位置860中,源组件86可通过沿路径586在双头箭头810的方向上移动源组件来定位。在位置860处,源点406可被操作或供电以发射穿过体积524以由检测器88检测的x射线锥864。束864可穿过体积824的一部分,先前束中的一者的一部分穿过该体积,和/或在不同的部分中穿过。
148.因此,如上所示,例如在图13a-图13d中,源组件可在机架82内或相对于该机架移动,用于在相对于体积524的多个视角处获取图像数据。如上所讨论,体积524通常可包括对
象30的一部分和/或包围对象,用于获取对象30的图像数据。在源组件86的移动期间,源点中的不同源点可被单独地操作或供电以使x射线束穿过体积524以由检测器88检测。如在各个位置830、838、850和860中示例性示出的,可以选定的模式操作每个源点,该选定的模式可以是顺序地、每隔一个、以顺序和重复模式供电的选定数量、或任何其他适当的模式,诸如本文进一步讨论的那些。
149.因此,当源组件86相对于体积524移动时,可对这些源点中的不同源点(诸如15个源点400-428)供电,以发射穿过体积524的x射线。这些源点中的每一者可包括选定的特性,诸如不同的功率或选定的滤波器,如上所讨论。此外,源组件86可相对于对象移动以在相对于体积524的不同视角处获取图像数据,和/或不同源点可在源组件86的任何特定位置处被供电以在源组件86的单个位置处的不同视角处获取图像数据。例如,位置838可对源414以及源点400和428两者供电。类似地,在源组件的任何一个特定位置处,可以选定的模式,诸如同时地、顺序地等,对任何选定数量的源供电,以诸如在体积524内或穿过其获取对象30的图像数据。
150.继续参考图12,并且另外参考图14和图15,成像系统80可作为选定类型的成像系统诸如荧光镜成像系统来操作。在荧光镜成像期间,x射线的连续束可由源组件86中的一个或多个源点发射,用于在选定的时间段内获取对象30的图像数据。因此,参考图14,示出了根据如上所讨论的各种实施方案的用于利用成像系统80进行荧光镜成像的过程900。
151.通常,方法900可在开始框904中开始。然后可在框908中接收开始荧光镜成像的信号或指令。接收到的信号可由使用者72诸如利用成像控制系统96或者通过任何其他适当的输入或接收系统发出。在框908中接收到荧光镜成像选择之后,可在框910中确定源组件的位置或定位。框910的源组件的位置的确定可基于适当或选定类型的荧光镜来进行。在各种实施方案中,成像系统80可用于帮助执行导管插入、消化道或肠道研究或其他适当研究。因此,在框910中可确定源组件86的一个或多个位置。此外,各种研究可包括源组件86的选定或预定位置,因此,源组件位置框910的确定或接收可从存储器再调用选定的源组件位置。
152.一旦在框910中确定了源组件的位置,如果需要移动,则可在框914中移动源组件。转向参考图15,示出了包括源组件86和检测器88的成像系统80的示意性图示。如上所讨论,检测器88可包括检测器表面88a,并且平面或轴线500可从检测器表面88a延伸。在确定位置和/或将源组件86移动到选定位置时,该位置可如图15所示相对于对象30使得轴线500诸如在选定位置中(包括相对于心脏30ht或对象30的其他选定部分)延伸穿过对象30。
153.在框918中可进行源组件86的哪些源点的选择或再调用。为了利用荧光镜技术成像,可选择包括多个x射线点或部分或为其供电,诸如源组件86的15个部分400-428中的一者或多者。本领域技术人员应当理解,虽然下面的讨论针对具有15个源部分的源组件,但如上所讨论可包括任何适当数量的源部分。
154.选择或再调用哪些源部分可包括选择相对于轴线500基本上对称的源部分。因此,可选择基本上关于轴线500对称的源部分中的两者或更多者,用于获取对象30(诸如心脏30ht)的投影(例如图像数据)。例如,可选择源点400并且可选择源点414以用于荧光镜图像数据的获取。在各种实施方案中,可利用源部分400、414两者(诸如以交替模式)来获取荧光镜图像数据。应当理解,还可使用附加的源部分(诸如源部分402和410)来获取荧光镜图像数据。还应当理解,如上所讨论,选定的源部分可以是15个源部分400-428中的源部分的子
集或选定的子集,并且可包括用于在荧光镜成像规程期间使用的选定滤波器。因此,在框918中选择或再调用用于成像的源点可包括选择可相对于轴线500对称地定位的源部分和/或包括选定的滤波或成形特征的那些的子集。另外,用于荧光镜的源部分可以选定的因素或参数(诸如选定的能量和/或速率,包括选定的平均功率和/或电压)操作。
155.一旦在框918中作出选择,则在框922中从源组件的第一选定源点或部分进行束(例如,x射线束)的供电或发射。例如,发射可来自源点400,如图15所示。第一部分可以是发射第一束926的源部分400。束926可穿过包括心脏30ht的一部分的对象30并且在检测器88处被检测。因此,在框930中进行第一图像数据的获取。如上所讨论,可利用显示设备84来查看第一图像。此外,如本领域技术人员所理解的,图像数据可被保存以用于各种分析和/或附加规程。
156.在框920的第一图像数据的获取之后,在框934中确定是否需要或要获取附加图像数据。可在初始规划期间做出是否需要附加图像数据的确定,诸如在框908中接收荧光镜成像或与荧光镜成像的接收一起被包括。还可从使用者72或基于使用者72接收用于获取附加图像数据的进一步附加指令。
157.如果不需要附加图像数据,则可遵循“否”路径938到结束框940。结束框940可包括各种规程,诸如利用成像系统80的图像数据的任何获取。此外,对对象30的规程可继续,诸如分析图像数据、利用图像数据对对象30执行规程、查看图像数据、改变图像数据或其他适当的规程。因此,结束框940可简单地结束利用成像系统80的荧光镜图像获取。
158.如果需要附加的图像数据,则可遵循“是”路径944。“是”路径944可继续进行到框948以确定源组件是否需要被移动。如果确定源组件确实需要被移动,则可遵循“是”路径952以在框956中移动源组件。然而,在各种实施方案中,如图15所示,不需要移动源组件86来获取附加的荧光镜图像数据。然而,应当理解,源组件86(单独地或与检测器88组合地)可相对于对象30移动以用于荧光镜图像数据的获取。因此,在框948中确定源组件是否需要移动也可遵循“否”路径946。
159.在框956中确定源组件被移动或者在框960中确定其不需要被移动之后,在框964中确定用于附加图像数据的选定源部分。附加源部分可以是初始或第一源部分,诸如源部分400。在各种实施方案中,例如,源部分400可用于获取附加图像数据,诸如利用另一束和/或在将源组件86移动到不同位置之后。然而,还应当理解,可使用附加的或不同的源部分诸如源部分414来获取附加的图像数据。
160.因此,源部分414可发射第二束968形式的x射线,该第二束可穿过对象30的心脏30ht和/或被其衰减并且在检测器88处被检测。如上所讨论,第二源部分414相对于轴线500与第一源部分400对称。因此,利用第二源部分414获取的图像数据可与利用第一源部分400获取的图像数据相关,诸如相对于轴线500偏移。然而,在各种实施方案中,应当理解,获取荧光镜图像数据的源部分可以是尽可能靠近轴线500同时相对于其对称的那些源部分。因此,源部分406和410可以是两个源部分,包括在框922中被供电的第一源部分和在框964中作出选择之后在框972中被供电的第二源部分。
161.在各种实施方案中,例如,对象30的荧光镜可被选择为包括诸如在心导管插入术期间对象30的基本上连续的或连续的可视图像。源部分相对于轴线500的位置可以是已知的或确定的,诸如是从轴线500偏移的选定角度或距离,其对于在选定荧光镜成像规程期间
使用的两个源部分可以是相同的。成像系统80和/或相关联的控制系统96可知道或确定源部分相对于轴线500的位置,并且生成考虑已知和选定的偏移的图像以用显示设备84进行查看,使得所显示的图像看起来是从相对于对象或对象的部分(诸如心脏30ht)的基本上单个位置拍摄的。例如,两个源406、410可相对于轴线500偏移类似或相同的距离976。偏移976可以是角偏移或平移距离偏移,并且可用于确定用于在显示设备84上显示的图像。因此,过程900被用于获取可利用显示设备84显示的用于选定规程的图像数据。
162.在框972中对第二源供电之后,在框980中进行附加图像数据的获取。如上所讨论,可在显示设备84上显示用于选定规程诸如荧光镜规程的附加图像数据。在获取附加图像数据框980之后,在框934中可再次确定是否需要附加图像数据。因此,过程900然后可基于选定规程是否需要附加图像数据而如上所讨论地继续进行。因此,可使用源组件86的多个源部分利用成像系统80执行荧光镜规程。
163.在各种实施方案中,多个源部分可用于确保在不同数据获取之间适当冷却源部分中的一者或多者以获取对象30的图像数据。例如,单个或第一源部分400在选定的发射定时之后(例如,在1或2毫秒之后)可能需要冷却期。因此,切换到另选或第二源部分可用于允许连续的荧光镜成像规程,同时允许第一或其他源部分在对源组件86的相同源部分重新供电之前具有冷却或松弛期。
164.如上所讨论,根据如图14所示的方法,成像系统可以荧光镜方式操作。在图像数据的获取期间,在第一图像数据框930中和/或在附加图像数据框964中,可使用各种附加特征。例如,包括源组件86的成像系统80可包括源部分中的特定一者,诸如可作为荧光镜成像或源部分操作的源部分406和410。根据各种实施方案,这些源部分可专用于荧光镜成像,并且可不在利用成像系统80的其他类型的成像期间使用。因此,应当理解,某些源部分可专用于特定类型的成像,诸如荧光镜成像。
165.此外,如上所讨论,这些源可相对于彼此定位,使得它们彼此间隔开。因此,在荧光镜成像技术期间,两个源可用于顺序地和/或基本上同时地成像,以识别或确定可类似于基本上三维(3d)透视图的透视图。由于两个源可彼此偏移,诸如在角距离上偏移,因此所获取的图像可相对于轴线500处于两个不同的视角处。此外,利用两个源获取的图像可相对于彼此处于透视距离处。因此,荧光镜成像系统可用于在荧光镜成像过程期间获取对象30的透视(诸如3d透视)图像数据。在各种实施方案中,例如,可顺序地操作两个源诸如源406和源410以获取对象30的两个不同透视图。可在源组件86和对象30以及检测器88都处于相同位置的情况下获取两个不同的透视图。可通过使用这些源部分中的两个源部分而不移动成像系统的任何部分(诸如源组件86和/或检测器组件88)来生成透视图像。
166.此外,可使用不同的成像源部分来根据不同的特性获取图像数据。例如,可使用两种不同的能量。例如,第一源部分406可用于获取具有第一x射线能量(诸如约80千伏峰值电压(kvp),包括约70-90kvp)的x射线投影。第二源部分410可用于获取具有第二能量(诸如约140kvp,包括约130-150kvp)的x射线投影。因此,可以不同的能量来获取荧光镜图像,该能量可利用两个不同的源部分生成。
167.此外,可沿长轴(诸如对象的轴线234)来获取荧光镜图像。源组件86可诸如大致沿轴线582定位在机架82内,如图8c所示。因此,可沿对象的长轴获取图像数据,该长轴也可以是成像系统80的轴线558。此外,如上所讨论,源组件86可如图9a和图9c所示旋转。因此,源
组件可定位在机架82内以沿对象30的长轴获取图像数据。因此,可在选定的视角处,诸如相对于对象30的长轴234,获取对象的荧光镜图像数据,该视角可大致在z方向或成像系统80的轴线上。
168.此外,如上所讨论,荧光镜成像可用于获取对象30的基本上实时的图像或数据获取。此类实时获取可用于各种目的,诸如用于在对象的图像中或相对于对象30执行选定的导管插入术或实时跟踪。此外,可获取图像以帮助引导选定的外科手术系统,诸如用于引导导管、引导深度脑刺激设备或其他适当的系统或植入物。因此,选定的外科手术系统(诸如机器人系统)可接收荧光镜图像数据作为输入以帮助引导或执行规程。例如,选定的机器人系统可包括mazor x机器人系统,诸如由美敦力公司出售的机器人系统,可以自主或半自主的方式操作,以利用由成像系统80获取的图像数据对对象30执行规程。
169.除了如上所讨论的操作之外,成像系统80可作为荧光镜成像系统操作,其中源400-428中的不同源以不同的曝光率操作。在各种实施方案中,在成像系统80作为荧光镜的操作期间,源组件86可相对于对象30移动。当源组件86移动时,可操作这些源中的不同源以生成图像数据或在检测器处检测的x射线。因此,可以不同的曝光率操作这些源中的不同源以获取适当的图像数据。例如,当源组件86相对于对象移动时,源部分400可以选定速率(诸如以曝光速度、能量等相对于其他源部分的一半、四分之一或其他适当分数的速率)操作。例如,源400可相对于对象定位在适当位置,以仅在源组件86的相对于对象移动的选定部分处获取图像数据。因此,源部分400可仅在选定的时间操作,而不是在源组件86相对于对象30的移动期间恒定地或连续地操作。因此,源部分中的不同源部分可以不同的速率或曝光时间或量操作,以便以适当的方式获取对象30的图像数据,诸如用于荧光镜成像。
170.转向参考图16以及图17a和图17b,成像系统80还可以选定的方式操作,诸如在锥束计算机断层摄影(cbct)系统中。成像系统80可以可类似于在荧光镜系统中操作的方式作为锥束成像系统操作,或者包括如本文所讨论的差异。因此,应当理解,成像系统80可以选定的方式操作以获取对象30的图像数据。
171.首先参考图16,示出了方法或过程1000。过程1000可在开始框1004中开始。开始框1004可包括适当的开始规程,诸如类似于如上所讨论的开始框904。例如,成像系统80可从选定位置相对于对象30移动,诸如从不同的房间和/或在单个房间内重新定位。如上所讨论,成像系统80可包括各种特征,诸如包括固定部分和可移动部分的机架82。因此,在选定规程期间,例如选定的dbs放置、假体放置等,成像系统80可从靠近对象的第一位置移动以对对象进行成像,然后移动远离对象,并且可返回以再次对对象进行成像。因此,框1004中的开始可包括各种技术或特征,诸如相对于对象30移动成像系统、对成像系统供电等。
172.在开始框104中开始之后,在框108中进行接收用于锥束ct的成像请求或技术。为了将成像系统80作为锥束ct来操作,源组件86可相对于对象30移动以对其中可放置对象30的体积进行成像。因此,成像系统80可作为锥束成像系统来操作以获取对象30的图像数据。在各种实施方案中,可重建在cbct期间收集的图像数据,以基于所获取的图像数据生成对象的三维模型重建。可以选定的方式获取对象30的图像数据,诸如移动源组件86和/或操作源组件中的一者或多者,诸如15个源组件400-428中的一者或多者,如本文进一步讨论的。
173.如图17a(示意性地)所示,包括源组件86的成像系统80可被操作以便以锥束ct方式获取或操作。成像系统80可通过利用源组件86连同检测器88对对象30进行成像而作为锥
束ct来操作。如上所讨论,检测器88可包括可延伸穿过源组件86的表面88a,并且源组件86可相对于其对称或反对称地设置。此外,轴线1010可延伸穿过对象30并且相对于表面诸如地板或支撑表面1014延伸。轴线1010可被理解为穿过对象30的任何选定的轴线,如本文提供的用于参考。
174.简要参考图17b,并继续参考图16,源组件86可与检测器88一起相对于对象30移动。从检测器88的表面88a延伸的轴线500可在选定的时间(诸如在源组件86移动时段之后)相对于参考轴线1010相对于表面1014和/或对象30成一定角度或位置。在一个示例中,轴线500可处于相对于患者轴线1010的位置1020处。当在位置1020处时,这些源部分中的不同源部分(诸如源部分422)可被供电以发射穿过对象30并且在检测器88处被检测的x射线。
175.当源组件86可移动时,方法1000可包括在框1024中确定或再调用用于成像的一个或多个源组件位置。如上所讨论,源组件86可在对象30的成像期间相对于对象30移动。因此,所再调用的确定位置可包括用于获取对象30的图像数据的路径。应当理解,源组件86因此可在对象30的成像期间被移动。源组件86以及因此成像系统80的其他部分然后可相对于对象30移动或被移动以用于图像数据的获取。
176.此外,方法1000可包括在框1028中确定或再调用哪些源部分或点将被供电用于cbct成像。此外,在框1032中作出用于对所再调用的源部分供电的模式的确定或再调用。如上所讨论,源部分中的每一者可以选定的方式被供电,诸如持续选定的时间段、选定的功率参数、选定的滤波器或形状等。此外,如上所讨论,源组件86可包括多个源部分,诸如15个源部分400-428,源部分的某个选定数量或子集可被操作用于整个cbct成像。因此,选定的滤波器可与源部分相关联,然后可被操作以获取cbct图像数据。确定和再调用哪些源部分和操作它们的哪些参数可基于源部分的选定子集和/或获取对象的图像数据的路径。此外,路径以及哪些部分和参数因此可基于待成像的对象的类型和/或其部分(例如相对于硬组织的软组织、关节置换、软组织植入(例如导管插入术))。
177.一旦确定了路径、对哪个源部分供电以及用于对源部分供电的模式,则在框1040中,源组件可被移动到第一位置并且第一源部分可被供电。如上文简要讨论的,如图17a所示,源组件86可被定位成使得轴线500与对象30的轴线1010对准。源部分400可发射束,诸如锥束1044,并且它可在检测器88处被检测。因此,当源组件86处于第一位置时,检测器88可获取图像数据,如图17a所示。这允许可在框1048中进行第一图像数据的获取。第一图像数据可用于各种目的,诸如如本文进一步讨论的重建、帮助和确定用于成像的另外路径等。
178.在框1052中确定是否请求和/或需要附加图像数据。如果不需要附加图像数据,则可遵循“否”路径1054到结束框1060。结束框1060可以是规程1000的结束。应当理解,可出现附加的特征或目的。例如,如上所讨论,可重建图像数据以基于所获取的图像数据生成对象30的选定模型(例如,三维图像)。此外,使用者72可使用所生成的图像和/或所生成的图像数据来帮助选定规程,诸如对对象30执行规程。同样如上所讨论,图像可被显示用于对对象的选定导航,诸如外科手术导航规程。因此,在框1060处结束过程1000可不一定意味着选定规程的结束和/或利用成像系统80生成的图像的使用,而是通常可简单地是cbct成像过程的结束。
179.然而,如果在确定框1052中确定请求或需要附加图像数据,则可遵循“是”路径1064。当遵循“是”路径1064时,可获取附加图像数据。在框1052中作出确定之后,如遵循“是”路径1064获取附加数据。源组件可如框1068中所确定的那样移动。如果确定源组件需要被移动,诸如基于如在框1028中确定的路径,则可遵循“是”路径1072。然后如上所讨论可在框1076中移动源组件,源组件框1076的移动可基于框1024中所确定或再调用的路径。此外,如上所讨论,源组件86也可相对于检测器88旋转或移动。因此,源组件的移动可包括源组件的任何选定的移动。此外,可确定源组件不可移动,并且可遵循“否”路径1080。
180.无论如何,当源组件处于用于获取附加图像数据的选定位置时,在框1084中确定每个附加图像数据是哪个源部分或哪个点。确定哪个源部分用于附加图像数据可基于在框1028中确定的再调用哪些源部分用于cbct和/或在框1032中确定的源部分供电模式。如上所讨论,可使用所确定或再调用的路径、所确定或再调用的用于cbct的源部分、和/或所确定或再调用的供电模式来确定在框1048中获取第一图像数据之后对附加图像数据的获取。因此,在框1084中确定哪个源部分可包括分别遵循在框1024、1028、1032中先前确定或再调用的路径、源部分或源供电模式。
181.在框1084中确定要对哪个源部分供电以及用于附加图像数据的模式之后,在框1088中可对选定源部分供电。在框1084中确定的在框1088中供电的选定源部分可包括或作为用于在框1048中获取第一图像数据的第一源部分。第一源部分可以选定的方式被供电,诸如以选定的电压、电流强度、形状等,以获取选定的图像数据。因此,可利用用于获取第一图像数据的相同的源部分,但以不同的方式和/或源组件86的不同位置来获取附加图像数据。此外,在框1084中确定的选定源部分可以是来自源组件86的源部分中的不同源部分,诸如源部分422,如图17b所示。然而,应当理解,可以与初始或先前图像数据基本上相同的方式来收集附加图像数据,诸如用于确认或附加数据收集。
182.在框1088中被供电的源部分422可发射在检测器88处被检测的x射线束1092。检测器88可定位在距轴线1010的位置1020处。因此,当在框1096中获取附加图像数据时,源部分422可穿过对象30的选定部分。附加图像数据可用于帮助形成对象30的选定图像,诸如对象30的选定部分的三维重建。
183.此外,可在与如图17b所示的不同视角、和/或不同的平移位置和/或不同的时间处获取附加图像数据,然后在框1048中获取第一图像数据。因此,在第一图像数据框1048和附加图像数据框1096的获取之间可能发生时间流逝。在各种实施方案中,不同的图像数据获取可被配准用于图像的重建和/或可用于示出对象30的顺序变化。然而,源组件86可相对于对象30移动以在各种不同的视角和/或位置处获取图像数据,用于获取对象30的图像数据以执行其重建。
184.附加图像数据的获取可在框1096中发生。在获取附加图像数据框1096之后,在框1052中确定是否需要另外的附加图像数据。如上所讨论,是否需要附加图像数据的确定可基于成像的类型,诸如可确定或再调用的cbct规划或路径。因此,过程1000可用于连续地或循环地确定源组件86的位置、发射图像数据的x射线束获取的源部分的选择、和/或选定图像数据获取所需的图像数据量和位置。因此,如上所讨论,确定是否需要附加图像数据遵循“是”路径1064还是“否”路径1054。
185.因此,过程1000可用于cbct图像数据的获取。因此,在结束框1060中和/或在结束框1060之后,所获取的图像数据可包括对象30的多个图像数据获取或投影。如上所讨论,可使用多个图像数据获取来执行对象30的图像(诸如三维图像或模型)的重建。三维图像的重
建可基于通常已知的重建技术,诸如滤波反投影或迭代重建方法。因此,利用具有源组件86的源部分中的一者或多者的成像系统80获取的图像数据可用于重建对象30的选定图像。然后,图像可显示在选定的显示设备上,诸如显示设备84,如上所讨论。因此,重建图像可用于各种规程,诸如相对于对象30的导航规程和/或对象30的规划或诊断规程。
186.在各种实施方案中,如图18中示意性示出的,包括源组件86和检测器组件88的成像系统80还可以或另选地用于利用源部分中的两者或更多者(诸如源部分400和源部分420)基本上同时地获取对象30的图像数据。如本文进一步讨论的,多个源部分可用于基本上同时获取图像数据,以同时获取对象30的选定部分的图像数据。不同的源部分可利用用于各种目的(诸如配准)的单个图像获取或检测器获取在相对于对象30的不同视角处获取图像数据,如本文进一步讨论的。
187.继续参考图18,并且参考包括图1、图6a和图12的上述附图,成像系统80可相对于对象30定位。如上所讨论,对象30可包括任何适当的对象,诸如人类对象。在各种实施方案中,例如,对象30的一部分(诸如椎骨1200)可在对象30内。可相对于椎骨1200定位植入物,诸如椎弓根螺钉1204或其他适当的植入假体构件或可植入构件。应当理解,椎弓根螺钉1204仅是示例性的,并且其他适当的部分可定位在对象内。此外,如本领域技术人员所理解的,诸如椎骨本身1200的各种部分可出于各种目的而被成像,诸如其中进一步讨论的那些目的。
188.然而,诸如包括椎骨螺钉1204和/或椎骨1200的对象30可利用成像系统80进行成像。包括多个源部分(诸如源部分400和420)的源组件86可用于获取对象30的基本上同时的图像数据获取。例如,源部分400可发射x射线束1210。源部分420可发射x射线束1214。x射线束1210、1214两者可穿过对象30和/或对象30的一部分,诸如椎骨1200和/或椎弓根螺钉1204。束可以具有选定部分,诸如分别为射线1220、1224,其可穿过对象的选定相交部分,诸如例如椎骨1200和/或椎弓根螺钉1204。然后,可在检测器88处,诸如在不同位置的表面88a处检测沿相应射线1220、1224的x射线。例如,射线1220可在点1230处冲击或延伸到检测器。射线1224可在点1234处延伸到检测器表面88a。因此,两条射线1220、1224可穿过对象或对象内的体积或区域或与其相交,诸如交点1238。单个点1238可在两个不同的且通常间隔开的点处被投影到检测器表面88a上。接触或投影点1230、1234的差异是由于相应源部分400、420相对于被成像部分或点1238的偏移位置(即,其间的距离)造成的。
189.源部分400可相对于源部分420偏移选定距离或量1242。偏移可包括角偏移,该角偏移包括约5度至约20度,并且还包括约10度。此外,源部分400、420可相对于从检测器表面88a延伸的轴线500偏移选定量。
190.成像系统80可包括选定的控制器,诸如控制器96,其可确定相应源部分的偏移或位置,诸如偏移1242是已知的或预定的。偏移1242可被预先确定并存储以用于稍后再调用,诸如通过包括处理器部分或模型的控制器。此外,由于成像系统80的控制,诸如源组件在机架82内的移动和/或机架82的跟踪(例如,利用成像跟踪设备62),或其他适当的位置或姿势确定,源组件86的位置(例如,相对于对象)可以是已知的。
191.两个接触点1230、1234允许在两个不同的视角处基本上同时生成选定部分(诸如椎骨1200和/或椎弓根螺钉1204)的图像。继续参考图18并另外参考图19,示出了单个投影1260。单个投影1260可包括在对象30的单个部分(诸如椎骨1200和/或椎弓根螺钉1204)的
两个不同视角处的两个投影。单个投影1260可包括与来自源部分400的束1210相关的第一投影部分1264。单个投影1260可包括与源部分4200的第二束1214相关的第二投影部分1268。两个投影部分1264、1268可由于来自两个视角源部分400、420的两个束1210、1214而生成,这两个束彼此偏移了偏移量1242。这些投影中的每一者可包括相同的部分,诸如在第一视角处的椎骨投影部分1200'和在第二视角处的椎骨位置1200'。类似地,各自可包括椎弓根螺钉投影,诸如在第一投影1204'处的椎弓根螺钉和在第二投影1204'处的椎弓根螺钉。因此,单个投影1260可包括任何一个单个部分(例如,椎骨1200和/或椎弓根螺钉1204)的两个透视图。
192.单个部分的双视角可允许与先前获取的图像配准。例如,先前获取的图像可包括对象30的磁共振图像(mra)、锥束重建、计算机断层摄影(ct)或其他适当的图像。先前获取的图像可在任何适当的时间获取,并且可利用任何适当的成像模态来获取。然而,先前获取的图像可包括对象的选定部分(诸如椎骨1200和/或椎弓根螺钉1204)的三维图像。可使用选定或已知的技术(诸如反投影技术)来将先前获取的图像与当前或稍后获取的图像(诸如单个投影1260)配准。因此,在选定时间处,诸如在选定规程期间,成像系统80可用于利用源部分中的两者或更多者来获取单个投影。单个投影可包括对象30的单个部分的两个或更多个透视图,并且两个或更多个透视图可允许与先前获取的图像配准。
193.因此,与先前获取的图像的配准可用于规划和/或确认选定规程。该配准可利用由成像系统80生成的单个投影1260来确定。此外,与先前获取的图像的配准可允许相对于选定的规划或其他适当技术的导航。然而,包括源组件86的两个或更多个源部分的成像系统80可允许与具有单个投影图像(诸如单个投影图像1260)的先前获取的图像配准。
194.应当理解,如图所示的椎骨1200和/或椎弓根螺钉1204的所有示例性使用,配准适当的对象部分是可能的。此外,虽然作为示例讨论了人类对象,但也可以使用各种无生命的或非人类的对象。
195.根据各种实施方案,成像系统还可被操作以生成或获取有限角度的断层摄影。有限角度的断层摄影可包括对象的有限或小于180或360的图像数据获取。在各种实施方案中,有限角度的断层摄影可包括将机架移动通过有限角度、在有限角度上激发源阵列和/或两者的组合。
196.出于说明和描述的目的,已经提供了对实施方案的前述描述。上述描述并不旨在是详尽的或对本发明进行限制。特定实施方案的单独元件或特征通常不限于该特定实施方案,而是在适用的情况下,可互换并且也可以在选定实施方案中使用,即使未具体示出或描述。同一元件或特征可以多种方式变化。此类变型不会被视为脱离本发明,并且所有此类修改旨在包括在本发明的范围内。
197.应当理解,可将本文所公开的各个方面以与说明书和附图中具体给出的组合不同的组合进行组合。还应该理解,取决于示例,本文描述的过程或方法的任一者的某些动作或事件可以以不同的顺序执行,可以完全添加、合并或省略(例如,执行这些技术可能不需要所有描述的动作或事件)。另外,尽管为清楚起见,本公开的某些方面被描述为由单个模块或单元执行,应当理解,本公开的技术可以通过与例如医疗装置相关联的单元或模块的组合来执行。
198.在一个或多个示例中,描述的技术可在硬件、软件、固件或它们的任何组合中实
现。如果在软件中实现,则功能可作为一个或多个指令或代码存储在计算机可读介质上并由基于硬件的处理单元执行。计算机可读介质可包括非暂态计算机可读介质,其对应于有形介质,诸如数据存储介质(例如,ram、rom、eeprom、闪存存储器,或可用于存储指令或数据结构形式的期望程序代码并且可由计算机访问的任何其他介质)。
199.指令可由一个或多个处理器执行,如一个或多个数字信号处理器(dsp)、通用微处理器、图形处理单元(gpu)、专用集成电路(asic)、现场可编程逻辑阵列(fpga)或其他等同的集成或离散逻辑电路系统。因此,如本文所用的术语“处理器”可指前述结构或适于实现所描述的技术的任何其他物理结构中的任一种。另外,本技术可在一个或多个电路或逻辑元件中完全实现。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
