技术特征:
1.一种动态定位性能评价方法,其特征在于,所述方法包括:设置驱动机构和视觉模块,所述驱动机构配置为控制所述视觉模块的运动,以通过所述驱动机构的反馈信息计算获得所述视觉模块与第一时间戳对应的位置信息数据;设置标定模块,并通过所述视觉模块在预设条件下采集所述标定模块的图像以获得所述图像与定位时间戳对应的定位信息数据,其中,所述视觉模块与所述标定模块相对运动;采用动态位移补偿算法,将所述第一时间戳与所述定位时间戳进行对比以计算获得多种定位误差;采用动态定位性能评价算法对预设参数的权重进行分析以获得对应评价数值,其中,所述预设参数包括多种所述定位误差,所述动态定位性能评价算法基于专家系统和灰色聚类评价模型建立;以及设计并训练bp神经网络模型,将所述评价数值输入训练后的所述bp神经网络模型以输出动态定位性能评价方案。2.根据权利要求1所述的方法,其特征在于,所述视觉模块包括相机;所述驱动机构包括电机和传动带,所述电机驱动所述传动带运动,所述相机位于所述传动带上并与所述传动带共同运动;以及所述标定模块包括标签,所述定位误差包括标签定位误差,其中,在所述相机与所述传动带共同动运动过程中,所述标签与所述相机相对运动。3. 根据权利要求2所述的方法,其特征在于,设置所述预设条件的步骤包括:设置具有不同尺寸的多个所述标签;以及将所述相机的拍摄规格配置为不同的分辨率和/或不同的帧率,以在所述拍摄规格下采集不同尺寸的所述标签的图像。4. 根据权利要求2所述的方法,其特征在于,多种所述定位误差包括:在第一方向上的第一定位误差,在第二方向上的第二定位误差,在第三方向上的第三定位误差,其中,所述第一方向、所述第二方向和所述第三方向两两垂直;以及获得所述第一定位误差的步骤包括:通过所述驱动机构的反馈信息获得所述相机在第一位置的运动速度、运动加速度和所述第一时间戳,并计算获得所述相机的第一位置参数;输入所述第一位置参数、所述第一时间戳、所述运动速度和所述运动加速度;输入所述定位时间戳,其中,所述第一位置为距所述定位时间戳所对应的标签的时间偏差最小的位置;以及计算获得所述定位时间戳与所述第一时间戳的差值,以及计算获得所述定位时间戳所对应的相机的第二位置参数,其中,所述第一定位误差基于所述第二位置参数和所述定位时间戳对应的定位信息数据的差值计算获得。5.根据权利要求4所述的方法,其特征在于,获得所述第二定位误差和所述第三定位误差的步骤包括:测量得到所述相机在所述第一位置的第一定位测量值和第二定位测量值;基于自识别视觉标记定算法获得第一定位计算值和第二定位计算值;以及将所述第一定位计算值与所述第一定位测量值进行对比以获得所述第二定位误差,将
所述第二定位计算值与所述第二定位测量值进行对比以获得所述第三定位误差,其中,所述第一定位测量值为沿所述第二方向的测量值,所述第二定位测量值为沿所述第三方向的测量值,所述第一定位计算值为沿所述第二方向的计算值,所述第二定位计算值为沿所述第三方向的计算值。6. 根据权利要求2所述的方法,其特征在于,所述预设参数还包括定位计算速度均值,以及对所述预设参数的权重进行分析以获得对应评价数值的步骤包括:采用所述动态定位性能评价算法对所述定位计算速度均值的权重进行分析,以获得所述定位计算速度均值的对应评价数值;以及采用所述动态定位性能评价算法对多种所述定位误差的权重进行分析,以获得每种所述定位误差的对应评价数值。7. 根据权利要求4所述的方法,其特征在于,所述第一定位误差包括第一误差均值、第一误差标准差、第一最大误差值、第一最小误差值、第一误差绝对值最大值、第一误差绝对值最小值;所述第二定位误差包括第二误差均值、第二误差标准差、第二最大误差值、第二最小误差值、第二误差绝对值最大值、第二误差绝对值最小值;以及所述第三定位误差包括第三误差均值、第三误差标准差、第三最大误差值、第三最小误差值、第三误差绝对值最大值、第三误差绝对值最小值。8.根据权利要求1或6所述的方法,其特征在于,所述动态定位性能评价算法基于所述专家系统和所述灰色聚类评价模型建立包括:将所述预设参数的性能指标对所述动态定位性能评价方案的影响程度划分为多个等级,并对每一所述等级设置对应的分值;确定所述专家系统中的专家对所述预设参数的性能指标评分的样本矩阵;确定灰类并构造可能度函数,计算灰色评价矩阵;以及输出灰色聚类分析结果。9.根据权利要求1或6所述的方法,其特征在于,所述bp神经网络模型包括输入层、隐藏层和输出层,设计并训练所述bp神经网络模型的步骤包括:设置所述bp神经网络模型的初始权重参数和临界值,其中,所述初始权重参数和所述临界值均为随机数值;输入所述预设参数及其对应的评价数值以计算得到中间输出值;将所述中间输出值通过激励函数处理后获得所述隐藏层的输出值;将所述隐藏层的输出值计算处理后输入到所述输出层,并经由所述激励函数处理后输出计算评价值以完成正向传播;采用梯度下降法调整所述输入层、所述隐藏层、所述输出层的权重和阈值以完成反向传播;以及往复进行所述正向传播和所述反向传播直至误差小于预设期望值。10.根据权利要求3所述的方法,其特征在于,所述相机在所述预设条件下采集所述标签图像的轮次大于一个轮次,其中,所述相机从初始位置出发,沿所述传动带方向往复运动一次并回到所述初始位置为一个轮次。
11.一种动态定位性能评价设备,其特征在于,所述设备包括:标定模块;视觉模块,用于在预设条件下采集所述标定模块的图像以获得所述图像与定位时间戳对应的定位信息数据,其中,所述视觉模块与所述标定模块相对运动;驱动机构,配置为控制所述视觉模块的运动,以通过所述驱动机构的反馈信息计算得所述视觉模块与第一时间戳对应的位置信息数据;第一算法模块,基于动态位移补偿算法将所述第一时间戳与所述定位时间戳进行对比以计算获得多种定位误差;第二算法模块,基于动态定位性能评价算法对预设参数的权重进行分析以获得对应评价数值,其中,所述预设参数包括多种所述定位误差,所述动态定位性能评价算法基于专家系统和灰色聚类评价模型建立;以及训练后的bp神经网络模型,用于处理所述评价数值,并输出动态定位性能评价方案。12. 根据权利要求11所述的设备,其特征在于,所述视觉模块包括相机;所述驱动机构包括电机和传动带,所述电机驱动所述传动带运动,所述相机位于所述传动带上并与所述传动带共同运动;以及所述标定模块包括标签,所述定位误差包括标签定位误差,其中,在所述相机与所述传动带共同动运动过程中,所述标签与所述相机相对运动。13. 根据权利要求12所述的设备,其特征在于,所述预设条件包括:所述标签的数量为多个,且分别具有不同尺寸;以及所述相机的拍摄规格配置为不同分辨率和/或不同帧率,其中,所述相机在所述拍摄规格下采集所述标签的图像。14.根据权利要求11所述的设备,其特征在于,所述预设参数还包括定位计算速度均值。15. 一种动态定位性能评价系统,其特征在于,所述系统包括:如权利要求11至14中任一所述的动态定位性能评价设备;以及机械臂,用于完成预定动作,其中,所述预定动作在所述动态定位性能评价设备输出的所述动态定位性能评价方案条件下完成。
技术总结
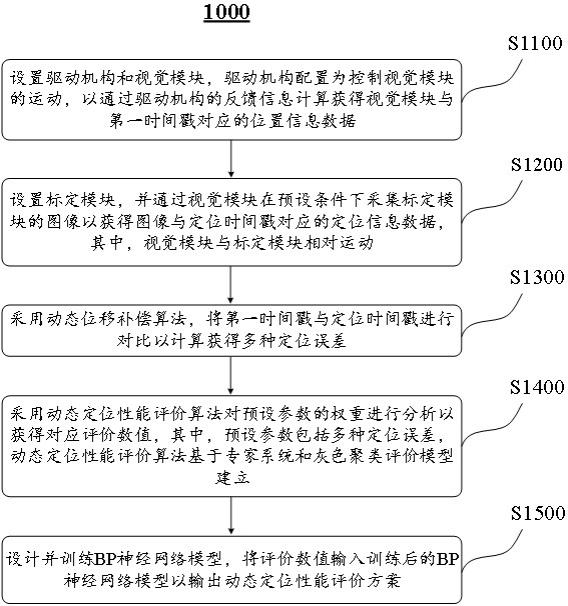
本申请提供了一种动态定位性能评价方法、设备以及系统。所述方法包括:设置驱动机构和视觉模块并获得所述视觉模块与第一时间戳对应的位置信息数据;设置标定模块,并通过所述视觉模块在预设条件下采集所述标定模块的图像以获得所述图像与定位时间戳对应的定位信息数据;采用动态位移补偿算法,将所述第一时间戳与所述定位时间戳进行对比以计算获得多种定位误差;采用动态定位性能评价算法对预设参数的权重进行分析以获得对应评价数值,所述动态定位性能评价算法基于专家系统和灰色聚类评价模型建立;以及设计并训练BP神经网络模型,将所述评价数值输入训练后的所述BP神经网络模型以输出动态定位性能评价方案。络模型以输出动态定位性能评价方案。络模型以输出动态定位性能评价方案。
技术研发人员:陈震 李桓
受保护的技术使用者:享刻智能技术(北京)有限公司
技术研发日:2023.07.14
技术公布日:2023/8/23
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。