技术特征:
1.一种车辆控制方法,其特征在于,包括:目标车辆上的车身电子稳定系统获取所述目标车辆的整车车速和横向加速度信息;所述车身电子稳定系统根据所述整车车速和所述横向加速度信息,确定所述目标车辆的当前运动工况;当所述当前运动工况为低动态工况时,所述目标车辆上的电机控制器在检测到所述目标车辆打滑时,进行降扭控制,以抑制所述目标车辆的打滑;当所述当前运动工况为高动态工况时,所述目标车辆上的整车控制器获取驾驶员需求扭矩和所述车身电子稳定系统计算的esp降扭扭矩;以及根据所述驾驶员需求扭矩和所述esp降扭扭矩进行相应的控制操作。2.根据权利要求1所述的车辆控制方法,其特征在于,所述方法还包括:当所述当前运动工况为低动态工况时,所述目标车辆上的电机控制器获取电机转速变化率;所述电机控制器根据所述电机转速变化率进行预打滑状态检测,得到检测结果;所述电机控制器根据所述检测结果判断所述目标车辆是否打滑;如果是,执行所述的在检测到所述目标车辆打滑时,进行降扭控制。3.根据权利要求1所述的车辆控制方法,其特征在于,所述目标车辆上的电机控制器在检测到所述目标车辆打滑时,进行降扭控制,包括:所述电机控制器进入转速控制模式,获取非驱动轮转速;所述电机控制器以所述非驱动轮转速为参考目标,进行降扭控制,并检测驱动轮转速;所述电机控制器在检测到所述驱动轮转速与所述参考目标的偏差小于预设标定阈值且稳定预设时间后,则确定打滑得到抑制,并退出所述转速控制模式。4.根据权利要求1所述的车辆控制方法,其特征在于,在所述目标车辆上的整车控制器获取驾驶员需求扭矩和所述车身电子稳定系统计算的esp降扭扭矩之前,所述方法还包括:当所述当前运动工况为高动态工况时,所述车身电子稳定系统获取所述目标车辆当前的车辆状态信息;所述车身电子稳定系统根据所述车辆状态信息计算esp降扭扭矩;所述车身电子稳定系统将所述esp降扭扭矩发送至所述目标车辆上的整车控制器。5.根据权利要求1所述的车辆控制方法,其特征在于,所述整车控制器根据所述驾驶员需求扭矩和所述esp降扭扭矩进行相应的控制操作,包括:所述整车控制器对所述驾驶员需求扭矩和esp降扭扭矩进行仲裁,得到目标扭矩;所述整车控制器将所述目标扭矩通过can报文发到所述电机控制器,以使所述电机控制器根据所述目标扭矩进行相应的控制操作。6.一种车辆控制系统,其特征在于,所述车辆控制系统包括车身电子稳定系统、电机控制器以及整车控制器;所述车辆控制系统设置于目标车辆上;其中,所述车身电子稳定系统,用于获取所述目标车辆的整车车速和横向加速度信息;以及根据所述整车车速和所述横向加速度信息,确定所述目标车辆的当前运动工况;所述电机控制器,用于在所述当前运动工况为低动态工况,且检测到所述目标车辆打滑时,进行降扭控制,以抑制所述目标车辆的打滑;所述整车控制器,用于在所述当前运动工况为高动态工况时,获取驾驶员需求扭矩和
所述车身电子稳定系统计算的esp降扭扭矩;以及根据所述驾驶员需求扭矩和所述esp降扭扭矩控制进行相应的控制操作。7.根据权利要求6所述的车辆控制系统,其特征在于,所述电机控制器,还用于当所述当前运动工况为低动态工况时,获取电机转速变化率;以及根据所述电机转速变化率进行预打滑状态检测,得到检测结果;以及根据所述检测结果判断所述目标车辆是否打滑;如果是,执行所述的在检测到所述目标车辆打滑时,进行降扭控制。8.根据权利要求6所述的车辆控制系统,其特征在于,所述电机控制器,具体用于进入转速控制模式,获取非驱动轮转速;以及以所述非驱动轮转速为参考目标,进行降扭控制,并检测驱动轮转速;以及在检测到所述驱动轮转速与所述参考目标的偏差小于预设标定阈值且稳定预设时间后,则确定打滑得到抑制,并退出所述转速控制模式。9.根据权利要求6所述的车辆控制系统,其特征在于,所述车身电子稳定系统,还用于在所述目标车辆上的整车控制器获取驾驶员需求扭矩和所述车身电子稳定系统计算的esp降扭扭矩之前,且当所述当前运动工况为高动态工况时,获取所述目标车辆当前的车辆状态信息;以及根据所述车辆状态信息计算esp降扭扭矩;以及将所述esp降扭扭矩发送至所述目标车辆上的整车控制器。10.根据权利要求6所述的车辆控制系统,其特征在于,所述整车控制器,具体用于对所述驾驶员需求扭矩和esp降扭扭矩进行仲裁,得到目标扭矩;以及将所述目标扭矩通过can报文发到所述电机控制器,以使所述电机控制器根据所述目标扭矩进行相应的控制操作。
技术总结
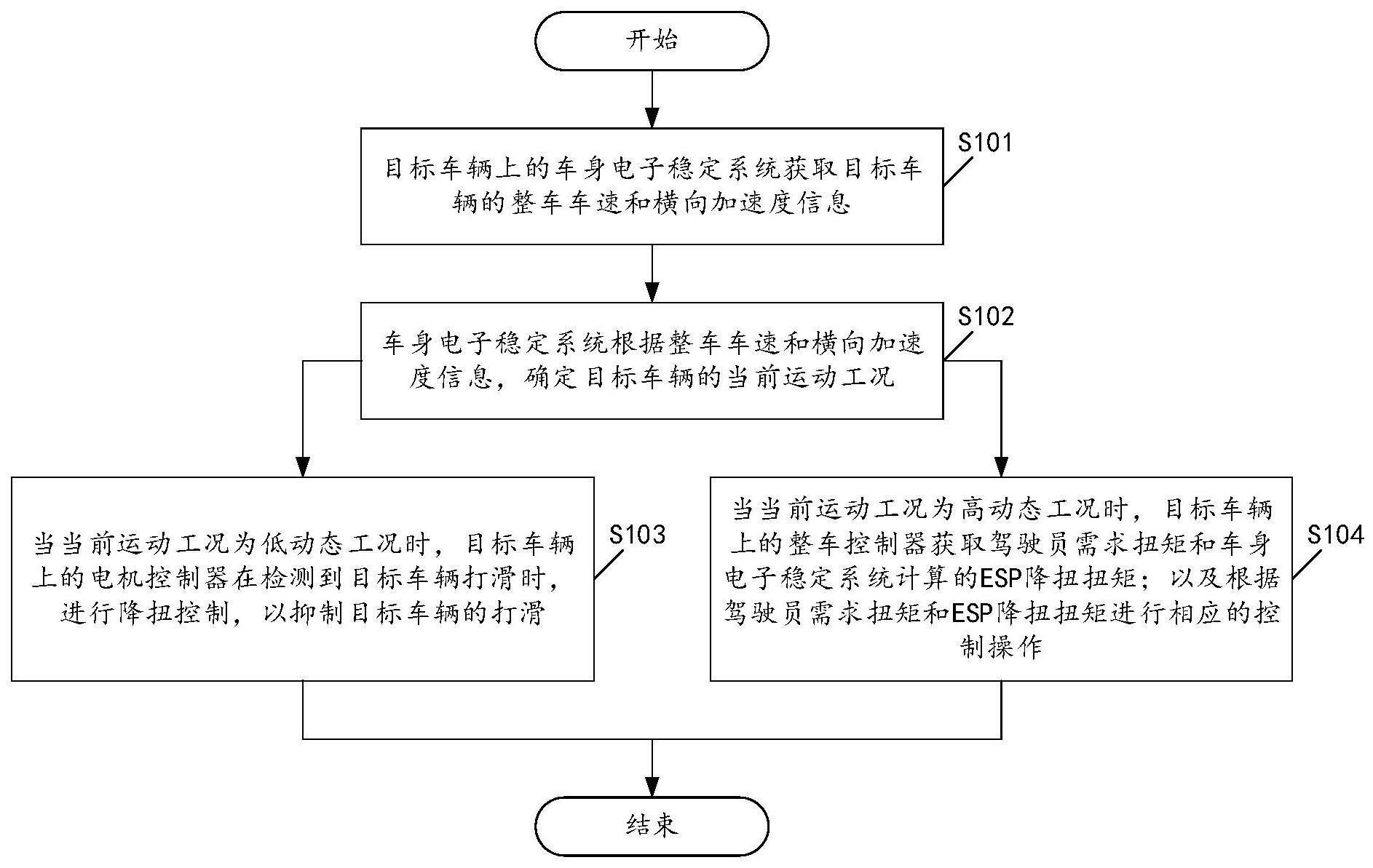
本申请提供一种车辆控制方法及系统,该方法包括:目标车辆上的车身电子稳定系统获取目标车辆的整车车速和横向加速度信息;车身电子稳定系统根据整车车速和横向加速度信息,确定目标车辆的当前运动工况;当当前运动工况为低动态工况时,目标车辆上的电机控制器在检测到目标车辆打滑时,进行降扭控制,以抑制目标车辆的打滑;当当前运动工况为高动态工况时,目标车辆上的整车控制器获取驾驶员需求扭矩和车身电子稳定系统计算的ESP降扭扭矩;以及根据驾驶员需求扭矩和ESP降扭扭矩进行相应的控制操作。可见,该方法及装置能够降低响应延迟,从而提高扭矩响应的快速性,减少车辆打滑程度。度。度。
技术研发人员:崔谨想 张进 黄慈梅 赵小坤 朱红雨 万希
受保护的技术使用者:广汽埃安新能源汽车股份有限公司
技术研发日:2023.06.19
技术公布日:2023/8/15
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。