1.本发明涉及充电器领域,特别是一种智能识别类型的移动充电器及其充电方法。
背景技术:
2.目前,绝大多数的充电器只能输出额定功率,功能单一,无法实现真正的充电器多用的功能。并且现有的充电器在进行充电的途中,通常需要人对充电设备和充电器进行连接才能进行充电,而此种充电方式会造成充电效率低下,在面对不同型号的充电器时,人们通常难以分辨对应的充电器型号是否对应其待充电的充电设备。因此在新能源设备越来越普及的现代社会,如何解决充电器能自主识别对应的待充电设备,并自动和待充电设备进行对接进行充电是现阶段丞待解决的技术问题。
技术实现要素:
3.本发明的目的是为了解决上述问题,设计了一种智能识别类型的移动充电器及其充电方法。
4.实现上述目的本发明的技术方案为,进一步,在上述一种智能识别类型的移动充电器及其充电方法中,所述智能识别类型的移动充电器包括智能识别模块、校准模块、移动模块、输出模块,其中所述智能识别模块用于识别待充电设备的设备类型,根据所述设备类型获取充电方位信息和充电功率信息,并将所述充电方位信息传输至所述移动模块;所述校准模块用于检测所述待充电设备和所述移动充电器的路径校准信息,并将所述路径校准信息传输至所述移动模块;所述移动模块用于接收所述路径校准信息,并对所述移动充电器进行移动控制;所述输出模块用于获取所述充电功率信息,对所述移动充电器的充电功率进行控制;所述智能识别类型的移动充电器的充电方法包括以下步骤:基于所述智能识别模块识别待充电设备的设备类型,通过传感器检测所述设备类型的充电方位信息和充电功率信息;并根据所述充电方位信息生成第一路径信息;接收所述第一路径信息,所述移动模块基于所述第一路径信息生成第一移动指令,所述第一移动指令对所述移动充电器进行实时移动控制;根据所述校准模块对所述实时移动控制进行校准,得到路径校准信息;响应于所述移动模块,通过所述路径校准信息生成第二移动指令,所述第二移动指令对所述移动充电器进行目标移动控制;基于所述校准模块,判断所述移动充电器和所述充电方位是否连接成功;若连接成功,则响应于所述输出模块,基于所述充电功率信息控制所述移动充电器的充电功率。
5.进一步,在本发明第一方面的第一种实现方式中,所述智能识别模块包括传感器子模块、类型识别子模块、路径规划子模块,其中:传感器子模块,用于对所述待充电设备和所述移动充电器的距离和方向进行检测;得到充电方位信息;
类型识别子模块,用于识别所述待充电设备的设备类型,并根据所述设备类型获取充电功率信息;路径规划子模块,用于基于所述充电方位信息对所述移动充电器到所述待充电设备的移动路径进行规划。
6.进一步,在本发明第一方面的第二种实现方式中,所述校准模块包括图像采集子模块、特征识别子模块、传感器子模块、路径校准子模块,其中:图像采集子模块,用于采集所述移动充电器移动到所述待充电设备途中的实时图像,得到实时移动图像;特征识别子模块,用于提取所述实时移动图像的图像特征向量,并对所述图像特征向量进行特征识别,得到目标特征向量;传感器子模块,用于获取所述移动充电器的实时移动参数;路径校准子模块,用于对所述实时移动参数和目标特征向量进行分析,得到路径校准信息。
7.进一步,在本发明第一方面的第三种实现方式中所述移动模块包括信息储存子模块、信号转换子模块、指令生成子模块、行进子模块、转向子模块、机械控制子模块,其中:信息储存子模块,用于存储所述第一路径信息和所述路径校准信息;信号转换子模块,用于将所述第一路径信息和所述路径校准信息转换为电信号;指令生成子模块,用于接收所述电信号,根据所述电信号的指令进行相应的硬件操作,得到第一移动指令或第二移动指令;行进子模块,用于接收所述第一移动指令或所述第二移动指令控制电机驱动或发动机启动;并对所述移动充电器的制动进行控制;转向子模块,用于接收所述第一移动指令或所述第二移动指令控制所述移动充电器的转向;机械控制子模块,用于控制所述移动充电器和所述待充电设备之间的连接。
8.进一步,在本发明第一方面的第四种实现方式中所述输出模块包括功率调节子模块、buck降压子模块、全波整流子模块、pfc调节子模块、emi处理子模块,其中:功率调节子模块,用于根据所述充电功率信息对所述输出模块的充电功率进行实时调节和控制,其中所述充电功率信至少包括电池容量、充电速度;buck降压子模块,用于对所述输出模块中的电感进行充电和放电进行控制;全波整流子模块,用于将所述输出模块中的交流电转换成直流电,所述全波整流子模块至少包括两个整流器;pfc调节子模块,用于调节所述输出模块中的交流电与电压之间的相位差;emi处理子模块,用于过滤所述输出模块中的信号干扰噪声,保护所述输出模块中的敏感电子元器件。
9.进一步,在本发明第一方面的第五种实现方式中所述基于所述智能识别模块识别待充电设备的设备类型,通过传感器检测所述设备类型的充电方位信息和充电功率信息;并根据所述充电方位信息生成第一路径信息,包括:通过图像传感器识别所述待充电设备的设备类型,并根据所述设备类型获取充电功率信息;
通过雷达传感器对所述待充电设备和所述移动充电器的距离和方向进行检测,得到充电方位信息;通过djistra路径规划模型对所述充电方位信息进行第一次路径规划,得到第一路径信息;所述第一路径信息包括移动距离信息、移动方向信息、移动速度信息、加速度信息。
10.进一步,在本发明第一方面的第六种实现方式中,所述接收所述第一路径信息,所述移动模块基于所述第一路径信息生成第一移动指令,所述第一移动指令对所述移动充电器进行实时移动控制,包括:获取所述第一路径信息,根据所述第一路径信息生成电信号;根据所述电信号生成对应的第一移动指令;将所述第一移动指令传输至所述移动充电器的硬件操作中心,响应于所述硬件操作中心,控制所述移动充电器的转向控制器、电机和制动控制器;所述移动模块还包括利用机械手臂控制所述移动充电器和所述待充电设备之间的连接。
11.进一步,在本发明第一方面的第七种实现方式中,所述根据所述校准模块对所述实时移动控制进行校准,得到路径校准信息,包括:通过图像传感器采集所述移动充电器移动至所述充电设备的实时行进的图像,得到实时移动图像;通过图像特征识别模型提取所述实时移动图像的图像特征向量,并对所述图像特征向量进行特征识别,得到目标特征向量;获取所述移动充电器的实时移动参数,所述实时移动参数包括移动速度、加速度、移动距离、移动方向;通过djistra路径规划模型对所述实时移动参数和目标特征向量进行第二次路径规划,得到路径校准信息。
12.进一步,在本发明第一方面的第八种实现方式中,所述基于所述校准模块,判断所述移动充电器和所述充电方位是否连接成功,包括:通过传感器判断所述移动充电器和所述充电设备是否连接成功;若连接成功,则响应于所述输出模块,基于所述充电功率信息控制所述移动充电器的充电功率;若连接失败,则响应于所述移动模块,对所述移动充电器和所述待充电设备进行重新连接;所述待充电设备包括新能源汽车、电瓶车、家用电器设备、移动智能设备、新能源工业设备。
13.进一步,在本发明第一方面的第八种实现方式中,所述响应于所述输出模块,基于所述充电功率信息控制所述移动充电器的充电功率,包括:获取所述充电功率信息和所述待充电设备的当前电量信息;基于所述充电功率信息将220v交流电压通过变压器降到与所述充电功率信息对应的充电电压,并利用压敏电阻吸收浪涌电流,得到第一充电电流;通过电容、共模电感组成的π型滤波电路滤对所述第一充电电流除共模和差模干
扰,得到第二充电电流;通过全桥整流电路将所述第二充电电流转换成直流电,得到目标充电电流;将所述目标充电电流对所述待充电设备进行输入,并根据所述当前电量信息计算充电时间。
14.其有益效果在于,通过基于所述智能识别模块识别待充电设备的设备类型,通过传感器检测所述设备类型的充电方位信息和充电功率信息;并根据所述充电方位信息生成第一路径信息;接收所述第一路径信息,所述移动模块基于所述第一路径信息生成第一移动指令,所述第一移动指令对所述移动充电器进行实时移动控制;根据所述校准模块对所述实时移动控制进行校准,得到路径校准信息;响应于所述移动模块,通过所述路径校准信息生成第二移动指令,所述第二移动指令对所述移动充电器进行目标移动控制;基于所述校准模块,判断所述移动充电器和所述充电方位是否连接成功;若连接成功,则响应于所述输出模块,基于所述充电功率信息控制所述移动充电器的充电功率。可以达到:1、可以提高充电器和充电设备之间的充电效率,减少能量损耗,并确保充电过程的安全性和稳定性;2、自动识别各种类型的充电设备,例如新能源汽车、电瓶车、移动智能设备、新能源工业设备等,并选择对应的充电功率进行充电;3、能自动和充电设备的充电接口进行连接,不用人工进行辅助操作,提升充电效率的同时提升用户体验。
附图说明
15.通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。
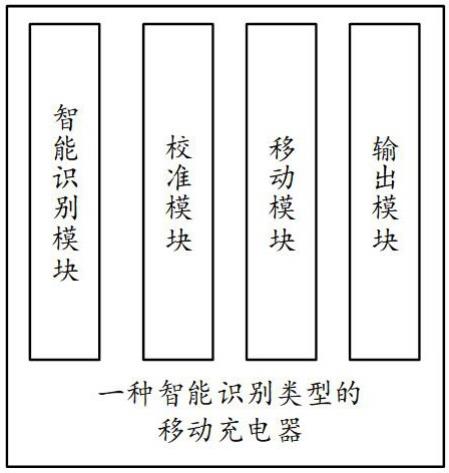
16.图1为本发明实施例中一种智能识别类型的移动充电器及其充电方法的第一个实施例示意图;图2为本发明实施例中一种智能识别类型的移动充电器及其充电方法的第二个实施例示意图;图3为本发明实施例中一种智能识别类型的移动充电器及其充电方法的第三个实施例示意图。
具体实施方式
17.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
18.本技术领域技术人员可以理解,除非特意声明,这里使用的单数形式“一”、“一个”、“所述”和“该”也可包括复数形式。应该进一步理解的是,本发明的说明书中使用的措辞“包括”是指存在所述特征、整数、步骤、操作、元件和/或组件,但是并不排除存在或添加一个或多个其他特征、整数、步骤、操作、元件、组件和/或它们的组。
19.下面结合附图对本发明进行具体描述,如图1所示,一种智能识别类型的移动充电器及其充电方法,该智能识别类型的移动充电器包括以下模块:智能识别模块、校准模块、移动模块、输出模块,其中智能识别模块用于识别待充
电设备的设备类型,根据设备类型获取充电方位信息和充电功率信息,并将充电方位信息传输至移动模块;校准模块用于检测待充电设备和移动充电器的路径校准信息,并将路径校准信息传输至移动模块;移动模块用于接收路径校准信息,并对移动充电器进行移动控制;输出模块用于获取所述充电功率信息,对移动充电器的充电功率进行控制。
20.本实施例中,智能识别模块包括传感器子模块、类型识别子模块、路径规划子模块,其中:传感器子模块,用于对待充电设备和移动充电器的距离和方向进行检测;得到充电方位信息;类型识别子模块,用于识别待充电设备的设备类型,并根据设备类型获取充电功率信息;路径规划子模块,用于基于充电方位信息对所述移动充电设备到待充电设备的移动路径进行规划。
21.本实施例中,校准模块包括图像采集子模块、特征识别子模块、传感器子模块、路径校准子模块,其中:图像采集子模块,用于采集移动充电器移动到所述充电设备途中的实时图像,得到实时移动图像;特征识别子模块,用于提取实时移动图像的图像特征向量,并对图像特征向量进行特征识别,得到目标特征向量;传感器子模块,用于获取所述移动充电器的实时移动参数;路径校准子模块,用于对实时移动参数和目标特征向量进行分析,得到路径校准信息。
22.本实施例中,移动模块包括信息储存子模块、信号转换子模块、指令生成子模块、行进子模块、转向子模块、机械控制子模块,其中:信息储存子模块,用于存储第一路径信息和路径校准信息;信号转换子模块,用于将第一路径信息和路径校准信息转换为电信号;指令生成子模块,用于接收电信号,根据电信号的指令进行相应的硬件操作,得到第一移动指令或第二移动指令;行进子模块,用于接收第一移动指令或第二移动指令控制电机驱动或发动机启动;并对移动充电器的制动进行控制;转向子模块,用于接收第一移动指令或第二移动指令控制移动充电器的转向;机械控制子模块,用于控制移动充电器和待充电设备之间的连接。
23.本实施例中,输出模块包括包括功率调节子模块、buck降压子模块、全波整流子模块、pfc调节子模块、emi处理子模块,其中:功率调节子模块,用于根据充电功率信息对输出模块的充电功率进行实时调节和控制,其中充电功率信至少包括电池容量、充电速度;buck降压子模块,用于对输出模块中的电感进行充电和放电进行控制;全波整流子模块,用于将输出模块中的交流电转换成直流电,全波整流子模块至少包括两个整流器;pfc调节子模块,用于调节输出模块中的交流电与电压之间的相位差;emi处理子模块,用于过滤输出模块中的信号干扰噪声,保护输出模块中的敏感电子元器件。
24.具体的,本实施例中,功率调节子模块可以使用脉冲宽度调制信号采样电路、移动充电器功率自动优化控制的驱动电路和移动充电器功率自动优化控制器。根据电网载波电能数据确定负载率,超过充电功率设定区间后,动态计算充电桩的使用功率:分析移动充电器充电可用功率、负载控制单元与每个充电桩的连接状况、功率要求和充电优先权:基于充电控制信号pwm波形占比,利用正交试验法动态调整pwm工作周期。制定移动充电器功率自动优化控制策略,自动排序充电桩的充电优先权。实现了移动充电器功率的自动优化控制。
25.其有益效果在于,通过智能识别类型的移动充电器包括智能识别模块、校准模块、移动模块、输出模块,其中智能识别模块用于识别待充电设备的设备类型,根据设备类型获取充电方位信息和充电功率信息,并将充电方位信息传输至所述移动模块;校准模块用于
检测所述待充电设备和移动充电器的路径校准信息,并将路径校准信息传输至移动模块;移动模块用于接收路径校准信息,并对移动充电器进行移动控制;输出模块用于获取所述充电功率信息,对移动充电器的充电功率进行控制。可以达到:1、可以提高充电器和充电设备之间的充电效率,减少能量损耗,并确保充电过程的安全性和稳定性;2、自动识别各种类型的充电设备,例如新能源汽车、电瓶车、移动智能设备、新能源工业设备等,并选择对应的充电功率进行充电;3、能自动和充电设备的充电接口进行连接,不用人工进行辅助操作,提升充电效率的同时提升用户体验。
26.本实施例中,请参阅图2,本发明实施例中一种智能识别类型的移动充电器及其充电方法的第二个实施例,包括以下步骤:步骤201、基于智能识别模块识别待充电设备的设备类型,通过传感器检测设备类型的充电方位信息和充电功率信息;并根据充电方位信息生成第一路径信息;具体的,通过图像传感器识别待充电设备的设备类型,并根据设备类型获取充电功率信息;通过雷达传感器对待充电设备和移动充电器的距离和方向进行检测,得到充电方位信息;通过djistra路径规划模型对充电方位信息进行第一次路径规划,得到第一路径信息;第一路径信息包括移动距离信息、移动方向信息、移动速度信息、加速度信息。
27.步骤202、接收第一路径信息,移动模块基于第一路径信息生成第一移动指令,第一移动指令对移动充电器进行实时移动控制;具体的,获取第一路径信息,根据第一路径信息生成电信号;根据电信号生成对应的第一移动指令;将第一移动指令传输至移动充电器的硬件操作中心,响应于硬件操作中心,控制移动充电器的转向控制器、电机和制动控制器;移动模块还包括利用机械手臂控制所述移动充电器和所述待充电设备之间的连接。
28.步骤203、根据校准模块对实时移动控制进行校准,得到路径校准信息;具体的,通过图像传感器采集移动充电器移动至充电设备的实时行进的图像,得到实时移动图像;通过图像特征识别模型提取实时移动图像的图像特征向量,并对图像特征向量进行特征识别,得到目标特征向量;获取移动充电器的实时移动参数,实时移动参数包括移动速度、加速度、移动距离、移动方向;通过djistra路径规划模型对实时移动参数和目标特征向量进行第二次路径规划,得到路径校准信息。
29.具体的,本实施例中djistra路径规划模型计算步骤:声明数组dis: 来保存源点到各个顶点的最短的距离大小。假设原点为s。声明数组t: 如果已经找到从源点出发到该点的最短路径,则把该点保存在数组t中。假设原点为s。则原点s到原点s的路径权重设为 0 即dis[s]= 0。初始时,集合t只有顶点s。若对于顶点s存在能直接到达顶点m的边(s.m),则把dis[m]的大小设为w(s,m),同时把所有其他(s不能直接到达的)顶点的路径长度设为无穷大。然后,从dis数组选择出最小值,则该最小值就是源点s到”该最小值对应的顶点”的最短路径的长度,并且把该点加入到t中,此时完成一个顶点。接下来,判断新加入的顶点是否可以到达其他顶点并且看看通过该顶点到达其他点的路径长度是否比”从源点s直接到这个其他顶点”短,如果是,那么就更新这些顶点在dis数组中的值,即更新源点s到该顶点的最短路径长度。然后又从dis中找出最小值,重复上述动作,直到t中包含了所有顶点,此时结束循环。
[0030]
步骤204、响应于移动模块,通过路径校准信息生成第二移动指令,第二移动指令
对移动充电器进行目标移动控制;具体的,获取路径校准信息,根据路径校准信息生成电信号;根据电信号生成对应的第二移动指令;将第二移动指令传输至移动充电器的硬件操作中心,响应于硬件操作中心,控制移动充电器的转向控制器、电机和制动控制器;移动模块还包括利用机械手臂控制所述移动充电器和所述待充电设备之间的连接。
[0031]
具体的,本实施例中,机械手臂为自动辅助机械手臂,能够识别移动充电器的充电接口和待充电设备的充电接口,并辅助两者接口进行连接。
[0032]
步骤205、基于校准模块,判断移动充电器和充电方位是否连接成功;若连接成功,则响应于输出模块,基于充电功率信息控制移动充电器的充电功率。
[0033]
具体的,通过传感器判断移动充电器和充电设备是否连接成功;若连接成功,则响应于输出模块,基于充电功率信息控制移动充电器的充电功率;若连接失败,则响应于移动模块,对移动充电器和待充电设备进行重新连接;待充电设备包括新能源汽车、电瓶车、家用电器设备、移动智能设备、新能源工业设备。
[0034]
具体的,获取充电功率信息和待充电设备的当前电量信息;基于充电功率信息将220v交流电压通过变压器降到与充电功率信息对应的充电电压,并利用压敏电阻吸收浪涌电流,得到第一充电电流;通过电容、共模电感组成的π型滤波电路滤对第一充电电流除共模和差模干扰,得到第二充电电流;通过全桥整流电路将第二充电电流转换成直流电,得到目标充电电流;将目标充电电流对待充电设备进行输入,并根据当前电量信息计算充电时间。
[0035]
具体的,当有接入待充电设备时,系统先对电池进行恒流充电,当检测到充电电压达到恒压充电的阈值后,将进行恒压充电。随着充电的进行,电池电压逐渐上升,充电电流逐渐减少,当检测到充电电流小于设定数值时,系统则判定基本完成充电,这时充电器进入涓流充电模式,从而补偿电池的自放电。
[0036]
具体的,移动充电器还包括辅助电源,辅助电源主要为各个芯片供电。辅助电源由lm2576-15,lm2576-12以及 ams1117-3.3芯片构成,可以分为输出稳定的220v—3.3v电压,15v、12v及3.3v电压,为pfc 芯片、电流检测芯片、stm32、风扇进行供电,保证系统的稳定运行。
[0037]
具体的,移动充电器还包括主控制电路,主要由stm32c8t6微处理器及其外围电路构成。stm32f103c8t6是由st公司设计研发的一款基于cortex-m3的32位微处理器,其工作电压为3.3v,处理器通过反馈电压、反馈电流大小与设定电压和电流值进行比较来调节输出;其内部具有两路iic通信接口,两路spi通信接口,两个12位的adc合计12路通道,两路dac接口。
[0038]
具体的,电压采样电路使用的是高精度的电阻,由于充电器输出的电压比较大,而stm32的adc输入电压范围为0~3.3v,因此必须进行降压处理。在充电器设计中,通过合理设定r24和r25电阻的阻值进行分压,再将分压后的值传递给stm32的pa2_adc引脚,通过一定比例的换算,可以精准得到当前输出的电压。
[0039]
本实施例中,请参阅图3,本发明实施例中一种智能识别类型的移动充电器及其充电方法的第三个实施例,包括以下步骤:步骤301、通过图像传感器采集移动充电器移动至充电设备的实时行进的图像,得
到实时移动图像;步骤302、通过图像特征识别模型提取实时移动图像的图像特征向量,并对图像特征向量进行特征识别,得到目标特征向量;具体的,本实施例中,图像特征识别模型是一种基于 nshot 特征描述符的点云表面匹配方法,主要进行如下工作:首先,分别为物体模型点云上的点和场景点云上的点计算其相应的 nshot 特征描述符,然后利用物体模型点云上点的 nshot 特征描述符和场景点云上点的 nshot 特征描述符之间的欧氏距离建立对应关系点对集合;然后,随机地从对应关系点对集合中选取多组对应点对,分别为每一对对应点对中所包含的物体模型点和场景点为中心,为物体模型点云和场景点云建立局部点云表面;最后,分别为每一对对应关系点对所对应的物体模型局部点云表面和场景局部点云表面进行匹配,求解多组变换矩阵,从中选取最优的变换矩阵 t 作为最终的物体模型点云和场景点云之间的变换矩阵。
[0040]
步骤303、获取移动充电器的实时移动参数,实时移动参数包括移动速度、加速度、移动距离、移动方向;步骤304、通过djistra路径规划模型对实时移动参数和目标特征向量进行第二次路径规划,得到路径校准信息。
[0041]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的仅为本发明的优选例,并不用来限制本发明,在不脱离本发明精神和范围的前提下,本发明还会有各种变和改进,这些变和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
