1.本发明涉及河道水生态治理技术领域,具体为一种河道水生态治理设备及河道水生态治理方法。
背景技术:
2.河道水生态河道治理是指在河道陆域控制线内,在满足防洪、排涝及引水等河道基本功能的基础上,通过人工修复措施促进河道水生态系统恢复,构建健康、完整、稳定的河道水生态系统的活动。
[0003][0004]
在申请号为202210517610.3,专利名称为:一种河道水生态治理设备及其河道水生态治理方法的中国发明专利中,公开了如下的技术方案:设备壳体、固定在设备壳体内的隔离板以及开设在设备壳体周侧的进液槽,所述隔离板上侧设置有驱动电机,所述驱动电机的输出轴固定有贯穿隔离板的螺纹杆,螺纹杆上螺纹连接有螺纹套筒,所述螺纹套筒的周侧通过连接杆固定有将进液槽封堵的环形挡板;还包括调节装置,所述调节装置用于使设备壳体内部与外部保持一定高度的液位差。
[0005]
但是以上的生态治理设备通过设置液位差使污水连着污物一起进入收集容器内并进入分离,分离后的液体作为水源泵送至环形管对设备壳体内壁冲刷,实现再次利用,实现自动收集,这种清理方式限于液位差较小,在进行清理时,可能会因为漂浮物的体积过大而难以被打捞,降低打捞效率。
[0006]
为此,本发明提供了一种河道水生态治理设备及河道水生态治理方法。
技术实现要素:
[0007]
(一)解决的技术问题针对现有技术的不足,本发明提供了一种河道水生态治理设备及河道水生态治理方法,通过在打捞口的内部嵌合设置有升降组件,升降组件包括第一电机,使升降框沿着打捞架的内部升降;在打捞架的内部设置有对称的翻转设备,翻转设备包括第二电机及第五连杆,第二传动件使第五连杆带动打捞网由竖直状态向水平状态转化,两个水平状态的打捞网磁性相吸,在升降框将竖直状态下的打捞网探入水面之下并转变为水平状态后,打捞网将漂浮物收集在内部,水分从打捞网内漏出。使体积不同的漂浮物都能被顺利打捞,通过升降框在运动状态下的惯性,使水分能够快速的从漂浮物的表面沥干,从而提高清理的效率,从而解决了背景技术中的问题。
[0008]
(二)技术方案为实现以上目的,本发明通过以下技术方案予以实现:一种河道水生态治理设备,包括漂浮物打捞船、升降组件及翻转设备,其中,所述漂浮物打捞船包括船体,在所述船体的尾部设置有打捞口,所述打捞口内部中空且底部延伸至水面,在所述打捞口的内部嵌合设置有升降组件,所述升降组件包括嵌合于打捞口内部的打捞架,在打捞架的边缘处设置
有用于提供动力的第一电机,所述第一电机的输出端通过第一传动件连接有升降框,在第一电机输出动力时,使升降框沿着打捞架的内部升降;在所述打捞架的内部设置有对称的翻转设备,所述翻转设备包括位于打捞架内侧的第一安装架,第一安装架的上方设置有第二电机,在第一安装架的一侧设置有第三安装架,第三安装架的表面贴附有第二安装架,所述第二安装架的一侧设置有第五连杆,第五连杆的底端可拆卸连接有打捞网,所述第二电机延伸至第一安装架一侧的输出端连接有第二传动件,在第二电机输出动力时,第二传动件使第五连杆带动打捞网由竖直状态向水平状态转化,两个水平状态的打捞网磁性相吸,在升降框将竖直状态下的打捞网探入水面之下并转变为水平状态后,打捞网将漂浮物收集在内部,水分从打捞网内漏出。
[0009]
进一步的,所述打捞架的外缘处开设有第二安装槽,所述第二安装槽用以容纳第一电机,在第二安装槽的内一侧设置有呈环状的第一安装槽,所述第一传动件包括与第一电机输出端同轴转动的第一锥齿轮,所述第一锥齿轮的一侧啮合有第二锥齿轮,在第一安装槽的内底端转动设置有传动齿环。
[0010]
进一步的,所述第二锥齿轮远离第一锥齿轮的一端同轴转动有传动杆,传动杆向远离第二锥齿轮的一侧延伸的端部外侧套接有第一传动齿轮,所述第一传动齿轮底端与传动齿环相啮合,所述传动杆的端部贯穿至打捞架的外部并同轴转动有第一连杆,第一连杆的端部铰接有第二连杆,第二连杆的末端与升降框可拆卸固定。
[0011]
进一步的,所述第二传动件包括开设于第二安装架表面的限位滑槽,在限位滑槽的两侧分别设置有第一联动件和第二联动件,第一联动件与第二电机的输出端相连接,在第二电机输出动力时,配合第二联动件对第五连杆的姿态进行调整。
[0012]
进一步的,所述第二联动件包括转动设置于第二安装架表面的连接圈,所述连接圈的底端内部中空,在连接圈的底端内部容纳有限位滑块,在第三安装架的底端一侧设置有连接座,连接座的边缘处铰接有第一限位套,在第一限位套内部滑动穿设有第五连杆,限位滑块活动设置于所述第五连杆延伸至连接圈表面的端部。
[0013]
进一步的,所述第一联动件包括与第二电机输出端同轴转动的第三连杆,所述第三连杆远离第二电机的一端铰接有第四连杆,第四连杆的表面贴附有传动齿条,在第四连杆的下方设置有与连接圈顶端同轴转动的第二传动齿轮,在第二传动齿轮与第二安装架之间活动设置有第二限位套,第四连杆从第二限位套的内部滑动穿过,传动齿条与第二传动齿轮相啮合。
[0014]
一种河道水生态设方法,还包括控制单元及采集单元;确定需要治理的河道区域,并建立河道区域的电子地图,将漂浮物打捞船投放至所确定的河道区域后,由采集单元在电子地图上将河道区域分割为若干个等面积的子区域,并采集各个子区域内的漂浮污染数据,汇总建立污染数据集,对污染数据集进行评估后,生成若干个与不同子区域相对应的污染系数wxs,以污染系数wxs对子区域进行标记,并在电子地图上显示;依据将污染系数wxs大于污染阈值的子区域确定为污染区域,并在电子地图上建立位置标记;将位置标记发送至控制单元后,在电子地图上规划出包含有各个位置标记的行驶路径,由漂浮物打捞船沿着行驶路径依次路过各个污染区域,当漂浮物打捞船抵达污染区域后,识别出污染区域内漂浮物的位置,并由控制单元形成打捞策略,使升降组件配合翻转设备对污染区域内的漂浮物进行处理。
[0015]
进一步的,所述采集单元包括区域划分模块及巡检模块,其中,所述巡检模块可以为携带有检测设备的无人机,由巡检模块对河道区域进行扫描成像,建立覆盖河道区域的电子地图,并将河道区域等面积的分割为若干个子区域,经过图像识别,分别识别出各个子区域内漂浮物的面积占对应子区域的比例,生成面积比mb,并获取各个子区域内水体的浑浊度hz。
[0016]
进一步的,在获取面积比mb和浑浊度hz后,做无量纲处理,依照如下公式生成污染系数wxs;
[0017]
其中,,,且,和具体值由用户调整设置,为常数修正系数;当所述漂浮物打捞船进入污染区域时,对污染区域内的漂浮物进行全面清理;当漂浮物打捞船进入非污染区域时,在电子点图上标记出非污染区域内的漂浮物聚集区,对漂浮物的聚集区进行清理。
[0018]
进一步的,所述打捞策略如下:在所述采集单元确定污染区域内漂浮物的位置后,先由第二电机输出动力,通过位于限位滑槽两侧的第一联动件和第二联动件相配合,使第五连杆带动打捞网由水平状态向竖直状态转化,竖直状态下的打捞网的底端位于水面上方,后由第一电机输出动力,通过第一传动件使升降框沿着打捞架的内部降低至漂浮物的侧下方,直至竖直状态下的打捞网的顶端浸入水面下方,待水面平静,重新使两个打捞网保持水平且端部磁性相吸,将升降框抬升至水面上方,直至水分沥干后,完成漂浮物的打捞。
[0019]
(三)有益效果本发明提供了一种河道水生态治理设备及河道水生态治理方法,具备以下有益效果:1、当水面存在漂浮物时,将升降框沉入水下并延伸至漂浮物的下方,便于对漂浮物进行打捞和回收,对漂浮物进行完整的打捞,避免由于漂浮物的体积过大而难以被打捞。
[0020]
2、通过对第五连杆的姿态进行调整,将打捞网以竖直状态放入水下,在水面平静后,再将打捞网调整至水平状态,在水面上有漂浮物的时候将漂浮物收入打捞网中,完成漂浮的打捞;当漂浮物在水面之下的体积不同时,在升降框协助下,将第二传动齿轮放入水下不同深度,可以确保使体积不同的漂浮物都能被顺利打捞,通过升降框在运动状态下的惯性,使水分能够快速的从漂浮物的表面沥干,从而提高清理的效率。
[0021]
3、通过生成污染系数wxs,在河道区域内确定出需要清理的污染区域,进行针对性的清理,可以提高清理效率,在有时间限制的前提下,减少河道区域的清理面积,并且通过规划出行驶路径,漂浮物打捞船沿着行驶路径移动,使清理过程能够有序进行,提高清理的效率。
[0022]
4、通过不同的清理策略,分别进行选择性清理和全面清理,能够在快速完成清理任务时,保持较高的清理效率。
附图说明
[0023]
图1为本发明漂浮物打捞船的俯视结构示意图;
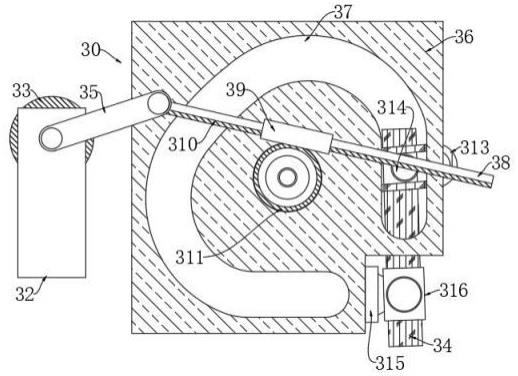
图2为本发明升降组件的剖视结构示意图;图3为本发明打捞架处剖视结构示意图;图4为本发明翻转设备的前向剖视结构示意图;图5为本发明翻转设备的后向剖四结构示意图;图6为本发明打捞网的剖视结构示意图;图7为本发明漂浮物打捞流程结构示意图;图中:10、漂浮物打捞船;11、船体;12、打捞口;20、升降组件;21、打捞架;22、第一电机;23、第一锥齿轮;24、第二锥齿轮;25、第一传动齿轮;26、第一安装槽;27、第二安装槽;28、传动齿环;29、第一连杆;210、第二连杆;211、升降框;212、传动杆;30、翻转设备;31、打捞网;32、第一安装架;33、第二电机;34、第五连杆;35、第三连杆;36、第二安装架;37、限位滑槽;38、第四连杆;39、第二限位套;310、传动齿条;311、第二传动齿轮;312、第三安装架;313、连接圈;314、限位滑块;315、连接座;316、第一限位套;40、控制单元;50、采集单元;51、区域划分模块;52、巡检模块。
具体实施方式
[0024]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0025]
请参阅图1至图7,本发明提供一种河道水生态治理设备,包括漂浮物打捞船10、升降组件20及翻转设备30,其中,所述漂浮物打捞船10包括船体11,在所述船体11的尾部设置有打捞口12,所述打捞口12内部中空且底部延伸至水面,在所述打捞口12的内部嵌合设置有升降组件20,所述升降组件20包括嵌合于打捞口12内部的打捞架21,在打捞架21的边缘处设置有用于提供动力的第一电机22,所述第一电机22的输出端通过第一传动件连接有升降框211,在第一电机22输出动力时,使升降框211沿着打捞架21的内部升降;在所述打捞架21的内部设置有对称的翻转设备30,所述翻转设备30包括位于打捞架21内侧的第一安装架32,第一安装架32的上方设置有第二电机33,在第一安装架32的一侧设置有第三安装架312,第三安装架312的表面贴附有第二安装架36,所述第二安装架36的一侧设置有第五连杆34,第五连杆34的底端可拆卸连接有打捞网31,所述第二电机33延伸至第一安装架32一侧的输出端连接有第二传动件,在第二电机33输出动力时,第二传动件使第五连杆34带动打捞网31由竖直状态向水平状态转化,两个水平状态的打捞网31磁性相吸;在升降框211将竖直状态下的打捞网31探入水面之下并转变为水平状态后,打捞网31将漂浮物收集在内部,水分从打捞网31内漏出。
[0026]
所述升降组件20包括打捞架21、第一电机22、第一锥齿轮23、第二锥齿轮24、第一传动齿轮25、第一安装槽26、第二安装槽27、传动齿环28及第一连杆29、第二连杆210、升降框211;其中,在所述打捞架21的外缘处开设有第二安装槽27,所述第二安装槽27用以容纳第一
电机22,在第二安装槽27的内一侧设置有呈环状的第一安装槽26,所述第一传动件包括与第一电机22输出端同轴转动的第一锥齿轮23,所述第一锥齿轮23的一侧啮合有第二锥齿轮24,在第一安装槽26的内底端转动设置有传动齿环28;在第二锥齿轮24远离第一锥齿轮23的一端同轴转动有传动杆212,传动杆212向远离第二锥齿轮24的一侧延伸的端部外侧套接有第一传动齿轮25,所述第一传动齿轮25底端与传动齿环28相啮合,所述传动杆212的端部贯穿至打捞架21的外部并同轴转动有第一连杆29,第一连杆29的端部铰接有第二连杆210,第二连杆210的末端与升降框211可拆卸固定。
[0027]
使用时,当需要对河道区域内的漂浮物进行打捞时,由第一电机22输出动力,在第一锥齿轮23与第二锥齿轮24的配合下,使第一传动齿轮25与传动齿环28相配合,在传动齿环28沿着第一安装槽26的内部转动时,使若干个第一连杆29同步产生旋转,通过第二连杆210的配合,使升降框211在打捞架21的内部来回升降。
[0028]
此时,当水面存在漂浮物时,可以将升降框211沉入水下并延伸至漂浮物的下方,便于对漂浮物进行打捞和回收,而且考虑到漂浮物的大部分都在水下,通过将升降框211沉入水下,也能对漂浮物进行完整的打捞,避免由于漂浮物的体积过大而难以被打捞。
[0029]
参考图4至图6,所述翻转设备30包括打捞网31、第一安装架32、第二电机33、第五连杆34、第三连杆35、第二安装架36、限位滑槽37、第四连杆38、第二限位套39、传动齿条310、第二传动齿轮311、第三安装架312、连接圈313、限位滑块314及连接座315、第一限位套316,其中,所述第二传动件包括开设于第二安装架36表面的限位滑槽37,在限位滑槽37的两侧分别设置有第一联动件和第二联动件,第一联动件与第二电机33的输出端相连接,在第二电机33输出动力时,配合第二联动件对第五连杆34的姿态进行调整。
[0030]
参考图5,所述第二联动件包括转动设置于第二安装架36表面的连接圈313,所述连接圈313的底端内部中空,在连接圈313的底端内部容纳有限位滑块314,在第三安装架312的底端一侧设置有连接座315,连接座315的边缘处铰接有第一限位套316,在第一限位套316内部滑动穿设有第五连杆34,限位滑块314活动设置于所述第五连杆34延伸至连接圈313表面的端部。
[0031]
参考图4,所述第一联动件包括与第二电机33输出端同轴转动的第三连杆35,所述第三连杆35远离第二电机33的一端铰接有第四连杆38,第四连杆38的表面贴附有传动齿条310,在第四连杆38的下方设置有与连接圈313顶端同轴转动的第二传动齿轮311,在第二传动齿轮311与第二安装架36之间活动设置有第二限位套39,第四连杆38从第二限位套39的内部滑动穿过,传动齿条310与第二传动齿轮311相啮合。
[0032]
使用时,在需要对打捞网31的姿态进行调整时,启动第二电机33输出动力,第三连杆35与第二电机33的输出端同轴转动,第二限位套39对第四连杆38起到限位作用,通过传动齿条310与第二传动齿轮311的配合,使第二传动齿轮311处于旋转转动状态,进而使连接圈313与第二传动齿轮311保持同步的转动,同时,利用连接圈313与限位滑块314的配合,在第五连杆34与第一限位套316的配合,在第五连杆34与第一限位套316的内部滑动时,第五连杆34带动打捞网31运动,使打捞网31在竖直状态和水平状态转换。
[0033]
使用时,通过对第五连杆34的姿态进行调整,将打捞网31以竖直状态放入水下,在
水面平静后,再将打捞网31调整至水平状态,从而,在水面上有漂浮物的时候将漂浮物收入打捞网31中,完成漂浮的打捞;更进一步的,当漂浮物在水面之下的体积不同时,在升降框211协助下,将第二传动齿轮311放入水下不同深度,可以确保使体积不同的漂浮物都能被顺利打捞,同时,通过升降框211在运动状态下的惯性,使水分能够快速的从漂浮物的表面沥干,从而提高清理的效率。
[0034]
请参阅图1至图7,本发明提供一种河道水生态治理方法,还包括,控制单元40及采集单元50,其中,确定需要治理的河道区域,并建立河道区域的电子地图,将漂浮物打捞船10投放至所确定的河道区域后,由采集单元50在电子地图上将河道区域分割为若干个等面积的子区域,并采集各个子区域内的漂浮污染数据,汇总建立污染数据集,对污染数据集进行评估后,生成若干个与不同子区域相对应的污染系数wxs,以污染系数wxs对子区域进行标记,并在电子地图上显示;将污染系数wxs大于污染阈值的子区域确定为污染区域,并在电子地图上建立位置标记;将位置标记发送至控制单元40后,在电子地图上规划出包含有各个位置标记的行驶路径,由漂浮物打捞船10沿着行驶路径依次路过各个污染区域,当漂浮物打捞船10抵达污染区域后,识别出污染区域内漂浮物的位置,并由控制单元40形成打捞策略,使升降组件20配合翻转设备30对污染区域内的漂浮物进行处理。
[0035]
使用时,通过生成污染系数wxs,在河道区域内确定出需要清理的污染区域,进行针对性的清理,可以提高清理效率,在有时间限制的前提下,减少河道区域的清理面积,并且通过规划出行驶路径,漂浮物打捞船10沿着行驶路径移动,使清理过程能够有序进行,提高清理的效率。
[0036]
参考图7,所述采集单元50包括区域划分模块51及巡检模块52,其中,所述巡检模块52可以为携带有检测设备的无人机,由巡检模块52对河道区域进行扫描成像,建立覆盖河道区域的电子地图,并将河道区域等面积的分割为若干个子区域,经过图像识别,分别识别出各个子区域内漂浮物的面积占对应子区域的比例,生成面积比mb,并获取各个子区域内水体的浑浊度hz;在获取面积比mb和浑浊度hz后,做无量纲处理,依照如下公式生成污染系数wxs;
[0037]
其中,,,且,其具体值由用户调整设置,为常数修正系数。
[0038]
需要说明的是,由本领域技术人员采集多组样本数据并对每一组样本数据设定对应的预设比例系数;将设定的预设比例系数和采集的样本数据代入公式,任意两个公式构二元一次方程组,将计算得到的系数进行筛选并取均值,得到、的取值;系数的大小是为了将各个参数进行量化得到的一个具体的数值,便于后续比较,关于系数的大小,取决于样本数据的多少及本领域技术人员对每一组样本数据初步设定对应的预设比例系数;只要不影响参数与量化后数值的比例关系即可。
[0039]
使用时,通过建立污染系数wxs,在需要对河道区域快速完成清理时,以污染系数wxs作为判断的标准,确定出其中的污染区域和非污染区域,在清理时,可以在不同的区域
分别采取不同的清理策略;当所述漂浮物打捞船10进入污染区域时,在升降组件20配合翻转设备30的条件下,对污染区域内的漂浮物进行全面清理;当漂浮物打捞船10进入非污染区域时,则是在采集单元50的配合下,在电子点图上标记出非污染区域内的漂浮物聚集区,由升降组件20配合翻转设备30对漂浮物的聚集区进行清理。
[0040]
使用时,通过以上不同的清理策略,分别进行选择性清理和全面清理,能够在快速完成清理任务时,保持较高的清理效率。
[0041]
参考图1至图6,所述打捞策略如下:在所述采集单元50确定污染区域内漂浮物的位置后,先由第二电机33输出动力,通过位于限位滑槽37两侧的第一联动件和第二联动件相配合,使第五连杆34带动打捞网31由水平状态向竖直状态转化,竖直状态下的打捞网31的底端位于水面上方,后由第一电机22输出动力,通过第一传动件使升降框211沿着打捞架21的内部降低至漂浮物的侧下方,直至竖直状态下的打捞网31的顶端浸入水面下方,待水面平静,重新使两个打捞网31保持水平且端部磁性相吸,将升降框211抬升至水面上方,直至水分沥干后,完成漂浮物的打捞。
[0042]
上述实施例,可以全部或部分地通过软件、硬件、固件或其他任意组合来实现。当使用软件实现时,上述实施例可以全部或部分地以计算机程序产品的形式实现。本领域普通技术人员可以意识到,结合本文中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、或者计算机软件和电子硬件的结合来实现。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。
[0043]
所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
[0044]
以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。