1.本发明属于高超声速风洞试验技术领域,具体涉及一种高超声速风洞试验过程天平温度测量方法。
背景技术:
2.高超声速风洞是开展高超声速空气动力学研究的重要平台,也是高超声速飞行器研制过程中不可或缺的重要地面试验设备。由于飞行器在高超声速飞行中存在真实气体效应、黏性干扰效应和稀薄气体效应相互耦合的复杂气动问题,数值仿真方法精度相对有限,在可以预见的一段时期内,高超声速飞行器气动特性参数的准确获取依然需要依赖各类风洞试验。
3.高超声速风洞试验中气流速度极高,为避免出现冷凝现象,试验时需要对主气流进行加热,加热后,高超声速风洞前室总温最高可达1100k以上,而测力天平作为一种结构复杂的多分量力、力矩复合传感器,测量精度极易受到周围环境影响。高超声速风洞试验时,天平的温度效应主要来自于高温加热和受热不均匀产生的温度梯度,由于天平受热后结构弹性模量、应变片阻值及线路阻值会发生变化,为得到精确的测量结果,天平校准时必须考虑高超声速风洞试验中不同元件所处位置的温度分布。然而,由于高超声速风洞试验中天平、模型与支撑系统之间存在热传导、对流、辐射等多种传热方式,加之天平与模型之间的连接关系相对复杂,通过数值仿真仅能得到近似的温度分布规律,无法得到准确的温度值,为了准确得到高超声速风洞试验过程中天平不同部位的温度分布与变化情况只能进行高超声速风洞试验。
4.高超声速风洞试验中天平安装在模型内腔,为了减少模型迎角变化产生的温度变化对天平测值的影响,天平外部还会安装水冷套或隔热套,水冷套或隔热套内部空间非常有限。在此情况下,为了实现天平内部温度测量,仅能使用微型温度测量设备。目前,常用的微型温度测量设备主要是超小型的薄膜式温度传感器和探头式温度传感器。薄膜式温度传感器(如pt100温度传感器)的结构尺寸小,使用时采用粘性胶通过胶粘方式固定在天平表面,无需破坏天平结构,但是,由于粘性胶的导热性差,温度响应时间过长,测量误差大,无法满足高超声速风洞试验测量的要求;探头式温度传感器安装时需要在天平表面打孔,安装工艺相对复杂,并且还会导致天平结构受力后产生应力集中,降低天平结构强度。
5.为了准确获取高超声速风洞试验时,复杂热环境下模型内腔中的天平温度分布与变化情况,亟需发展一种高超声速风洞试验过程天平温度测量方法。
技术实现要素:
6.本发明要解决的技术问题是提供一种高超声速风洞试验过程天平温度测量方法,用以克服现有技术的缺陷。
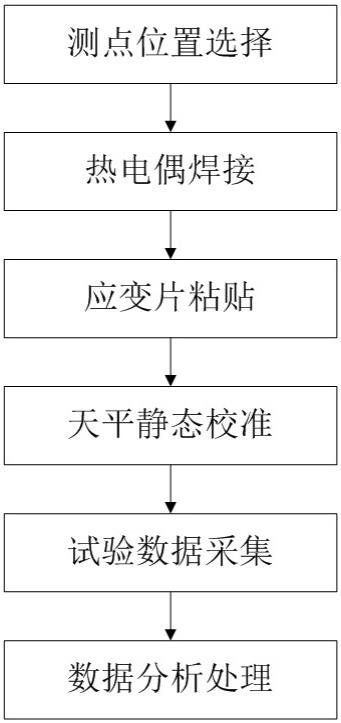
7.本发明的种高超声速风洞试验过程天平温度测量方法,包括以下步骤:a.测点位置选择;
b.热电偶焊接;c.应变片粘贴;d.天平静态校准;e.试验数据采集;f.数据分析处理。
8.进一步地,所述的a的测点位置选择的具体内容如下:测点位置从前至后覆盖天平应变片粘贴区域,每个测点位置靠近对应的天平应变片。
9.进一步地,所述的b的热电偶焊接的具体内容如下:采用精密激光点焊机将热电偶的热电偶丝焊接在测点位置,通过显微镜确认焊点焊接合格,将热电偶的导线穿过天平走线槽、穿线孔,从天平后端引出,再经天平支杆中心孔引出高超声速风洞洞体。
10.进一步地,所述的c的应变片粘贴的具体内容如下:待天平冷却后,粘贴天平应变片,组成测量电桥,避免精密激光点焊机工作时产生的高温对天平应变片产生不良影响。
11.进一步地,所述的d天平静态校准的具体内容如下:天平静态校准包括热电偶校准与天平应变片测力结果校准;热电偶校准需要进行天平温度补偿,热电偶校准在恒温箱中进行;天平应变片测力结果校准在天平校准架上进行,通过校准架加载获得天平的弹性角公式。
12.进一步地,所述的e的试验数据采集的具体内容如下:开展高超声速风洞试验,试验过程中,热电偶测量得到的温度数据通过热电偶数据采集系统采集,天平测力试验数据通过高超声速风洞数据采集系统采集;由于热电偶数据采集系统和高超声速风洞数据采集系统的系统时间与采集频率存在差异,为实现数据同步,高超声速风洞启动后,在流场建立、模型迎角就位、试验结束及相关特征时刻,通过专用的信号发生器,向热电偶数据采集系统和高超声速风洞数据采集系统同时发送高脉冲电平信号,控制热电偶数据采集系统和高超声速风洞数据采集系统进行同步采集。
13.进一步地,所述的f的数据分析处理的具体内容如下:数据分析处理包括温度数据处理和测力数据处理;温度数据处理过程包括数据滤波、数据剔除和温度计算;数据滤波采用低通滤波器消除高频干扰信号;数据剔除用于剔除由于焊点脱落及相关原因产生的异常数据;温度计算通过热电偶热电势输出值计算测点处对应的温度;测力数据处理按照高超声速风洞数据处理规范进行。
14.本发明的高超声速风洞试验过程天平温度测量方法具有如下优点:(1)安装简单,无需改变天平结构;(2)响应迅速,能够快速跟随测点位置的温度变化;(3)结构小巧,能够安装在天平与水冷套或隔热套之间的间隙内;(4)安全可靠,能够在测力的同时实现天平温度的测量,并且不会影响天平的测力数据与结构强度。
15.本发明的高超声速风洞试验过程天平温度测量方法简单、响应迅速、实施容易、结果准确。使用的热电偶结构小巧、安全可靠、无需改变天平结构,能够安装于天平与水冷套或隔热套间隙内,在不影响天平测力数据与结构强度的情况下,能够准确获取测点位置的温度,不仅能够用于高超声速风洞试验过程中天平温度的测量,还能够推广应用于低温风洞天平温度测量,以及其他响应速度要求高、内部空间狭小的结构件的温度测量,具有工程实用性。
附图说明
16.图1为本发明的高超声速风洞试验过程天平温度测量方法的工作流程图;图2a为实施例1的高超声速风洞试验过程天平温度测量方法使用的六分量杆式天平;图2b为实施例1的高超声速风洞试验过程天平温度测量方法中的热电偶在六分量杆式天平上的测点位置分布图;图3为实施例1的高超声速风洞试验过程天平温度测量方法获得的试验全过程热电偶与pt100传感器温度测量结果对比(马赫数5);图4为实施例1的高超声速风洞试验过程天平温度测量方法获得的试验全过程热电偶与pt100传感器温度测量结果对比(马赫数8);图5为实施例1的高超声速风洞试验过程天平温度测量方法获得的试验全过程热电偶与pt100传感器温度测量结果对比(马赫数5、迎角10
°
);图6为实施例1的高超声速风洞试验过程天平温度测量方法获得的试验全过程热电偶与pt100传感器温度测量结果对比(马赫数8、迎角10
°
)。
具体实施方式
17.下面结合附图和实施例详细说明本发明。
18.实施例1:以下实施例用于说明本发明,但不用来限制本发明的范围。
19.本实施例的天平为图2a所示的高超声速风洞六分量杆式天平,为测量高超声速风洞试验过程中六分量杆式天平结构温度分布及变化情况,沿轴向将六分量杆式天平划分为a-a~k-k共11个截面,各截面的剖面图见图2b。其中,m1、m5电桥布置于b-b和d-d截面,m2、m6电桥布置于i-i和j-j截面,x元电桥布置于f-f、g-g截面,mx元电桥布置于b-b截面。
20.本实施例的高超声速风洞试验过程天平温度测量方法流程图见图1。
21.a.测点位置选择;为了得到六分量杆式天平应变片安装区域的温度分布,在a-a~k-k共11个截面处确定如图2b所示的20个温度测点,其中,位于a-a截面的测点1#与测点2#位于应变片前部,k截面的测点19#与20#位于应变片后部,其余测点位置则在应变片组成的电桥附近;b.热电偶焊接;采用精密激光点焊机将热电偶的热电偶丝焊接在测点位置,本实施例选择线芯材质为镍铬合金/镍硅合金的k型热电偶,测温范围为-200℃~260℃,能够满足高超声速风洞马赫数8以下(包括马赫数8)的模型内腔六分量杆式天平温度测量需求。通过显微镜确认焊
点焊接合格,将热电偶的导线穿过天平走线槽、穿线孔,从天平后端引出,再经天平支杆中心孔引出高超声速风洞洞体;c.应变片粘贴;待六分量杆式天平冷却后,粘贴天平应变片,组成测量电桥,避免精密激光点焊机工作时产生的高温对天平应变片产生不良影响;d.天平静态校准;天平静态校准包括热电偶校准与天平应变片测力结果校准;热电偶校准需要进行天平温度补偿,热电偶校准在恒温箱中进行;天平应变片测力结果校准在天平校准架上进行,通过校准架加载获得天平的弹性角公式;e.试验数据采集;开展高超声速风洞试验,试验过程中,热电偶测量得到的温度数据通过dewesoft sirius数据采集系统采集,采样频率为100hz;六分量杆式天平测力试验数据通过高超声速风洞数据采集系统采集;本次高超声速风洞试验采用定迎角试验方式,即模型迎角到位后在风洞流场中稳定不动,期间对温度和气动力进行连续采集,以获取持续加热过程中六分量杆式天平温度和气动力的变化情况,为此,高超声速风洞启动后在“流场建立”、“模型0
°
迎角就位”、“模型10
°
迎角就位”、“试验结束”等特征时刻,通过专用的信号发生器,向热电偶数据采集系统和高超声速风洞数据采集系统同时发送高脉冲电平信号,控制热电偶数据采集系统和高超声速风洞数据采集系统进行同步采集;f.数据分析处理;数据分析处理包括温度数据处理和测力数据处理;温度数据处理过程包括数据滤波、数据剔除和温度计算;数据滤波采用低通滤波器消除高频干扰信号;数据剔除用于剔除由于焊点脱落及相关原因产生的异常数据;温度计算通过热电偶热电势输出值计算测点处对应的温度;测力数据处理按照高超声速风洞数据处理规范进行。
22.由于本次高超声速风洞试验中同一截面多个热电偶测值结果相差不大,因此,可以采用同一时刻多个热电偶测量的均值表示该时刻截面温度,例如,对于截面c-c,采用tf表示该截面任一时刻温度,则有:;其中,ti为该时刻下第i个测点测量得到的温度值。
23.对于位于支杆尾部的17#与18#测点,试验过程中温度测值基本一致,因此同样采用均值tr描述i-i截面至j-j截面区域的温度,即有:。
24.为了对比热电偶与pt100温度传感器测量结果的差异,本次高超声速风洞试验中还在c-c截面粘贴编号为pt100-1的温度传感器,在i-i截面和j-j截面中间粘贴编号为
pt100-2的温度传感器。
25.图3和图4分别给出了马赫数5和马赫数8时,高超声速风洞试验全过程采用热电偶和pt100温度传感器测得的六分量杆式天平前后温度随时间变化曲线。图3和图4中,横坐标t为时间,单位为s;纵坐标t为温度,单位为℃。与纵轴平行的、标记为ⅰ、ⅱ、ⅲ、ⅳ的四条虚线分别对应于“流场建立”,“模型0
°
迎角到位”,“模型10
°
迎角到位”和“试验结束”四个特征时刻。从图3和图4中可以看出,热电偶测得的温度曲线与pt100测值存在明显差异,与热电偶相比,pt100温度传感器由于响应时间较长,高超声速风洞试验中无法获取天平温度峰值,在流场建立前温度测值较热电偶测值偏低,模型迎角到位后温度后测值较热电偶测值偏高,而且在整个高超声速风洞试验过程中温度变化不大。与之相比,热电偶的测量结果准确度更高。
26.图5和图6为马赫数5和马赫数8时,模型10
°
迎角到位后至试验结束前热电偶与pt100温度传感器测值结果对比曲线。图5和图6中,横坐标t为时间,单位为s;纵坐标t为温度,单位为℃。从图5和图6中可以看出,马赫数5试验过程中,六分量杆式天平前后端热电偶测值tf与tr基本一致,试验全程热电偶呈逐渐减小趋势,由23.0℃降至约19.5℃,而pt100传感器测值则变化不大。在马赫数8时,模型迎角到位后热电偶测值tf较tr高3℃左右,随着试验进行,tf与tr测值及两者之间温度差均呈减小趋势,试验结束时,tf较tr高1.8℃左右。与之相比,pt100由于反映滞后,同一时刻相同位置测值高于热电偶测值,且c-c截面的pt100-1测值呈逐渐增大趋势,而六分量杆式天平尾部的pt100-2测值则变化不大。
27.尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域。对于熟悉本领域的人员而言,在不脱离本发明原理的前提下,可容易地实现另外的改进和润饰,本发明并不限于特定的细节和这里示出与描述的图例。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。