多轴惯性力传感器
1.关联申请
2.本技术基于2020年11月6日申请的日本专利申请第2020-185625号而作成,并将其记载内容援引于此。
技术领域
3.本公开涉及多轴惯性力传感器。
背景技术:
4.目前,例如在专利文献1中提出了多个传感器搭载于基座的装置。具体而言,基座固定于基板的设置面。基座形成为包括多个安装面的棱锥台状。各安装面相对于基板的设置面倾斜。各传感器分别配置在各安装面上。由此,能够检测多个检测轴的运动。
5.在先技术文献
6.专利文献
7.专利文献1:美国专利申请公开第2014/0013843号说明书
技术实现要素:
8.然而,在上述现有的技术中,必须将传感器分别安装到基座的各安装面上。由于各安装面分别朝向不同的方向,因此在一个基座上安装多个传感器是困难且复杂的。
9.另外,由于基座具备多个安装面,因此基座的形状复杂,并且基座的加工费时费力。因此,装置的成本增高。
10.本公开的目的在于,提供具备能够容易地进行多个传感器相对于基座的设置且能够降低成本的结构的多轴惯性力传感器。
11.根据本公开的一方案,多轴惯性力传感器包括安装件、多个模块及多个传感器。
12.安装件具有设置面。多个模块配置在安装件的设置面上且具有相对于设置面倾斜的倾斜面。多个传感器分别配置在多个模块的倾斜面上,且检测与主轴对应的惯性力。
13.多个模块具有在与多个模块中的至少一个或多个接触时相对地确定与接触对象之间的位置的定位部。多个模块通过组装成基于定位部相互确定了相对位置的状态及倾斜面分别朝向不同的方向的状态来构成基座。
14.多个传感器通过分别配置在基座的倾斜面上从而主轴分别朝向不同的方向,且分别检测与主轴对应的惯性力的向量分量。
15.由此,由于对一个模块设置一个传感器,因此能够容易地进行传感器相对于模块的设置。多轴化能够通过构成组合多个模块而成的基座来实现。另外,由于无需在一个模块上形成多个倾斜面,因此模块的形成及加工变得容易。因而,能够降低多轴惯性力传感器的成本。
附图说明
16.关于本公开的上述及其他目的、特征、优点通过参照了附图的下述的详细说明而得以更加明确。附图如下。
17.图1是第一实施方式的多轴惯性力传感器的立体图。
18.图2是图1所示的多轴惯性力传感器的俯视图。
19.图3是示出第一传感器设置于第一模块的状态的立体图。
20.图4是示出第一模块设置于嵌入板的情形的局部剖视图。
21.图5是示出横摆角速度施加到各传感器时的向量分量的图。
22.图6是示出侧倾角速度施加到各传感器时的向量分量的图。
23.图7是示出第一实施方式的各模块的变形例的图。
24.图8是示出第一实施方式的各模块的变形例的图。
25.图9是示出第一实施方式的各模块的变形例的图。
26.图10是示出第一实施方式的各模块的变形例的图。
27.图11是第二实施方式的多轴惯性力传感器的立体图。
28.图12是图11所示的多轴惯性力传感器的俯视图。
29.图13是第三实施方式的多轴惯性力传感器的立体图。
30.图14是图13所示的多轴惯性力传感器的俯视图。
31.图15是示出横摆角速度施加到第三传感器及第四传感器时的向量分量的图。
32.图16是示出侧倾角速度施加到第三传感器及第四传感器时的向量分量的图。
33.图17是示出俯仰角速度施加到第一传感器及第二传感器时的向量分量的图。
34.图18是示出俯仰角速度施加到第三传感器及第四传感器时的向量分量的图。
35.图19是第四实施方式的多轴惯性力传感器的立体图。
36.图20是图19所示的多轴惯性力传感器的俯视图。
37.图21是第五实施方式的多轴惯性力传感器的立体图。
38.图22是图21所示的多轴惯性力传感器的俯视图。
39.图23是第六实施方式的多轴惯性力传感器的立体图。
40.图24是图23所示的多轴惯性力传感器的俯视图。
41.图25是第七实施方式的多轴惯性力传感器的立体图。
42.图26是图25所示的多轴惯性力传感器的俯视图。
43.图27是第八实施方式的多轴惯性力传感器的立体图。
44.图28是第九实施方式的第一模块的立体图。
45.图29是第九实施方式的第一模块的立体图。
46.图30是第九实施方式的第一模块的立体图。
47.图31是示出第九实施方式的第一模块的变形例的图。
48.图32是示出第九实施方式的第一模块的变形例的图。
49.图33是第十实施方式的imu的分解立体图。
50.图34是第十一实施方式的imu的分解立体图。
51.图35是第十二实施方式的多轴惯性力传感器的俯视图。
52.图36是第十三实施方式的多轴惯性力传感器的俯视图。
53.图37是第十四实施方式的多轴惯性力传感器的俯视图。
54.图38是第十五实施方式的多轴惯性力传感器的俯视图。
具体实施方式
55.以下,一边参照附图一边说明用于实施本公开的多个实施方式。在各实施方式中,对与之前的实施方式中说明过的事项对应的部分标注同一参照符号,有时会省略重复的说明。在各实施方式中,在仅说明结构的一部分的情况下,结构的其他部分可以适用之前说明过的其他的实施方式。不仅能够将在各实施方式中具体明示了可以组合的部分彼此进行组合,只要组合不特别存在障碍,则即便没有明示也还能够将实施方式彼此部分地组合。
56.(第一实施方式)
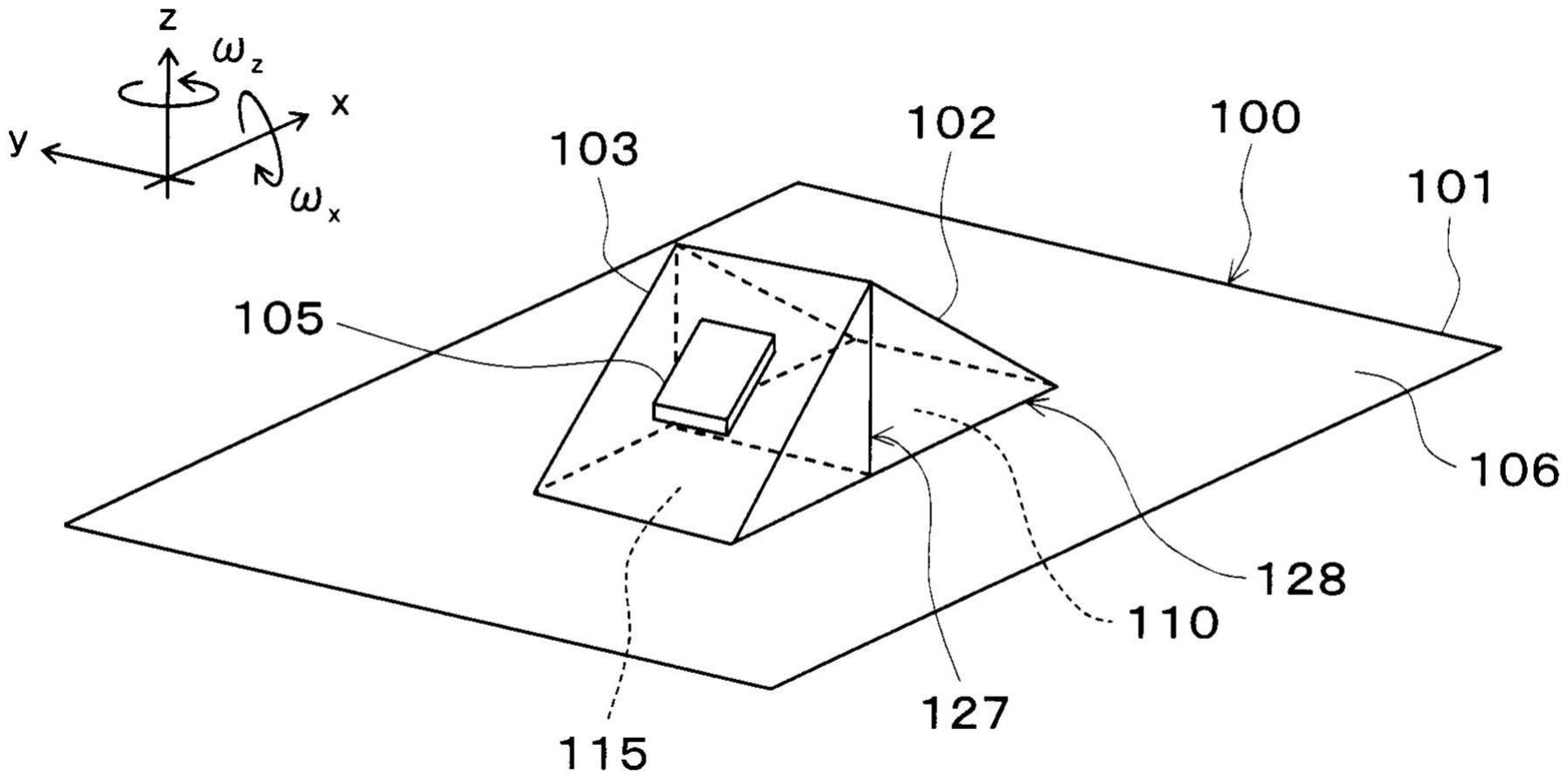
57.以下,参照附图对第一实施方式进行说明。如图1及图2所示,多轴惯性力传感器100包括安装件101、第一模块102、第二模块103、第一传感器104及第二传感器105。
58.安装件101具有设置面106。设置面106是平面。安装件101例如是单层或多层的印制基板。在安装件101上安装有微型计算机、lsi(large scale integration:大规模集成电路)等电子部件。安装件101收容在未图示的框体中。
59.各模块102、103是供各传感器104、105分别配置的基台。各模块102、103配置在安装件101的设置面106上。各模块102、103形成为相同的尺寸及相同的形状。各模块102、103不需要是实心构件。各模块102、103还可以是将一部分挖出而使内部成为空洞的结构。各模块102、103由金属、树脂、陶瓷等材料形成。
60.如图1所示,第一模块102是具有倾斜面107、一对端面108、109及一对侧面110、111的三棱柱。倾斜面107是相对于安装件101的设置面106倾斜的面。一对端面108、109是与倾斜面107连接的三角形状的面。一对侧面110、111是与倾斜面107和一对端面108、109连接的四边形状的面。一对侧面110、111中的一个侧面110配置于安装件101的设置面106。
61.一对端面108、109形成为直角等腰三角形的形状。倾斜面107是与直角等腰三角形的各端面108、109的斜边对应的面。因而,倾斜面107相对于安装件101的设置面106以45
°
的角度倾斜。
62.第二模块103与第一模块102同样地是具有倾斜面112、一对端面113、114及一对侧面115、116的三棱柱。这样,由于各模块102、103的形状为简单的三棱柱形状,因此,能够通过注射成型实现量产。由此,能够抑制各模块102、103的制造成本。
63.另外,如图3所示,第一模块102具有设置在倾斜面107上的多个电子部件117。电子部件117具有安装基板118、外置部件119、外部布线120和引出部121。
64.安装基板118例如是印制基板。利用焊料将第一传感器104安装在安装基板118上。安装基板118通过粘接剂等固定于倾斜面107。
65.外置部件119是芯片电阻等部件。外部布线120形成于安装基板118的表面且与第一传感器104、外置部件119连接。
66.引出部121与外部布线120连接。引出部121是用于将第一传感器104的信号向外部取出且从外部向第一传感器104进行电源供给的电连接部。引出部121与安装件101的电路连接。作为引出部121,也可以使用挠性基板用的插座。
67.与上述同样地,在第二模块103上安装有电子部件117及第二传感器105。即,各传
感器104、105分别配置在各模块102、103的各倾斜面107、112上。即,在第一模块102上配置有一个第一传感器104,在第二模块103上配置有一个第二传感器105。
68.另外,在图1及图2中,省略了配置于各模块102、103的电子部件117。在以下的各图中,也会适当省略配置于各模块102、103的电子部件117。
69.各传感器104、105是检测出角速度来作为与主轴对应的惯性力的单轴的陀螺仪传感器。若将与各模块102、103的各倾斜面107、112垂直的方向定义为z轴,则各传感器104、105的主轴与z轴平行地配置。因而,各传感器104、105检测出绕z轴的角速度作为惯性力。
70.各传感器104、105例如作为树脂模制封装件来构成。在封装件中内含有传感器元件和asic(application specific integrated circuit:专用集成电路)。传感器元件优选作为wlp(wafer level packaging:晶圆级封装)来构成。即,将传感器元件与使传感器元件动作来读出信号的ic(integrated circuit)合起来叫做陀螺仪传感器。另外,各传感器104、105也可以作为陶瓷封装件来构成。另外,封装件也可以成为开放式。
71.如图4所示,安装有第一传感器104的安装基板118使用嵌入板122固定于第一模块102。嵌入板122具有平面123及槽部124。槽部124是嵌入板122中的平面123的一部分凹陷而成的部分。槽部124形成为与第一模块102的外形大致相同的形状。槽部124至少具有与第一模块102的各侧面110、111接触的壁面125、126。
72.第一模块102以使各侧面110、111与槽部124的各壁面125、126接触的方式嵌入槽部124中。由此,第一模块102的倾斜面107与嵌入板122的平面123平行。通过将嵌入板122的平面123预先水平地固定,由此将第一模块102的倾斜面107水平地配置。在该状态下,利用基板安装技术、回流焊安装技术等将安装基板118及第一传感器104安装到第一模块102上。
73.第一传感器104是z轴陀螺仪传感器。由此,在第一传感器104相对于第一模块102的安装中,即便不精密地控制与主轴垂直的第一其他轴和与主轴及第一其他轴垂直的第二其他轴这两个方向的偏差,主轴即z轴方向相对于倾斜面107的轴偏差也不会变大。第一其他轴是x轴。第二其他轴是y轴。针对第二模块103,与上述同样地使用嵌入板122来安装电子部件117及第二传感器105。
74.另外,在各传感器104、105将x轴、y轴作为主轴的情况下,需要在控制了各传感器104、105的位置的状态下相对于各模块102、103进行安装。
75.在上述的结构中,如图1及图2所示,各模块102、103组装到安装件101的设置面106上。这里,将与安装件101的设置面106垂直的轴设为z轴。将与z轴正交且与设置面106平行的方向设为x轴。将与z轴及x轴正交且与设置面106平行的方向设为y轴。x轴及y轴是与设置面106平行的轴
で
。各模块102、103沿着x轴排列。
76.各模块102、103具有用于在相互接触时相对地确定与接触对象之间的位置的定位部127。定位部127是各模块102、103中的与接触对象碰触的触抵部。定位部127是与接触对象接触的部分。
77.各模块102、103组装为基于定位部127而相互确定了相对的位置的状态。另外,各模块102、103组装为各倾斜面107、112分别朝向不同的方向的状态。由此,各模块102、103构成基座128。各模块102、103通过粘接剂来连结。
78.多轴化通过各模块102、103的组装来实现。即,多轴惯性力传感器100是两轴的陀螺仪传感器。通过定位部127来规定各传感器104、105的相对位置的精度。通过管理各模块
102、103的加工形状并确保各模块102、103的形状精度,由此能够充分地保证两传感器104、105的轴正交性。
79.各传感器104、105通过分别配置在基座128的各倾斜面107、112上而使得主轴分别朝向不同的方向。即,各传感器104、105的主轴相对于安装件101的设置面106倾斜。因而,各传感器104、105分别检测与主轴对应的角速度的向量分量。
80.在本实施方式中,基座128通过将各模块102、103配置成以安装件101的设置面106中的基准点为基准的点对称来构成。基座128以第一模块102的另一个侧面111与第二模块103的另一个侧面116相面对的方式组装。由此,基座128构成山形形状。另外,各模块102、103通过使各侧面111、116接触而彼此无间隙地组装。以上是多轴惯性力传感器100的整体结构。
81.接着,对检测两轴的角速度的原理进行说明。首先,将绕z轴的角速度设为横摆角速度,将绕x轴的角速度设为侧倾角速度。各传感器104、105根据角速度作用的方向来辨别角速度的旋转方向。
82.具体而言,如图5所示,在横摆角速度施加到多轴惯性力传感器100上的情况下,向各传感器104、105施加角速度ωz。由于各模块102、103的各倾斜面107、112相对于z轴以45
°
的角度倾斜,因此对角速度ωz进行向量分解时,在各传感器104、105的z轴上施加有√2ωz/2的向量分量。虽然√2ωz/2的角速度会向各其他轴作用,但对各传感器104、105的主轴灵敏度没有影响。
83.如图6所示,在侧倾角速度施加到多轴惯性力传感器100上的情况下,向各传感器104、105施加角速度ω
x
。与上述同样地,对角速度ω
x
进行向量分解时,在各传感器104、105的z轴上施加有√2ω
x
/2的向量分量。虽然√2ω
x
/2的角速度会向各其他轴作用,但对各传感器104、105的主轴灵敏度没有影响。
84.在本实施方式中,各模块102、103沿着x轴配置。因此,若如上所述那样对绕x轴及绕z轴分别作用的角速度进行向量分解,则能够作为绕z轴的角速度来检测,并且,还能够检测角速度的方向。即,由于各传感器104、105是z轴陀螺仪传感器,因此作为x轴和z轴陀螺仪传感器来发挥功能。因此,能够检测绕x轴及绕z轴这两轴的角速度。
85.另外,在各模块102、103沿着y轴配置的情况下,能够检测绕y轴及绕z轴这两轴的角速度。
86.如以上所说明的那样,在本实施方式中,形成为在各模块102、103上设置各传感器104、105的结构。即,只要在一个模块102、103上安装一个传感器104、105即可。因此,多个传感器104、105相对于基座128的安装变得非常容易。另外,无需在一个模块102、103上形成多个倾斜面。因此,各模块102、103的形成、加工变得容易,进而能够降低多轴惯性力传感器100的成本。
87.并且,由于安装有单轴的传感器104、105的各模块102、103被组装,因此,能够利用两个传感器104、105分别检测绕x轴及绕z轴的角速度。
88.另外,基座128通过组装各模块102、103来构成。因此,能够将各传感器104、105的各主轴的正交性维持为高的准确度。即,能够维持各检测轴的感应精度。由于各模块102、103的各倾斜面107、112的倾斜角度为45
°
,因此使精度降低的主要原因即矩阵运算平分,这也是优点。
89.进而,由于各模块102、103的强度高,因此安装件101上产生的应变不易经由各模块102、103向各传感器104、105传递。因此,面对在外部产生的应变即应力,能够提高各传感器104、105的鲁棒性。
90.作为变形例,各传感器104、105也可以构成为主轴与z轴平行地配置且检测出z轴方向的加速度来作为惯性力的单轴的加速度传感器。加速度传感器还可以将x轴、y轴作为主轴来构成。各传感器104、105相对于各模块102、103的安装与图4所示的方法相同。在传感器104、105有两个的情况下,构成两轴的加速度传感器。与上述同样地,能够检测x轴及z轴这两轴的加速度。
91.作为变形例,如图7所示,也可以在第一模块102的倾斜面107上直接安装第一传感器104、外置部件119、外部布线120及引出部121。这种情况下,安装基板118不包括在电子部件117中。针对第二模块103也同样。各模块102、103通过热塑性树脂的注射成型来制造。外部布线120、电极通过mid(molded interconnect device:模塑互连器件)工艺来形成。即,各模块102、103兼作安装基板118。
92.作为变形例,如图8所示,第一模块102也可以形成为由倾斜面107和一个侧面110构成的角部的前端被倒角了的形状。针对第二模块103也同样。
93.作为变形例,如图9所示,第一模块102也可以形成为由倾斜面107和各侧面110、111构成的两处的角部的前端被倒角了的形状。针对第二模块103也同样。
94.作为变形例,如图10所示,在图9所示的第一模块102的形状中,也可以形成为由倾斜面107、一个端面108及一个侧面110构成的角部被倒角了的形状。另外,第一模块102还可以形成为由倾斜面107、另一个端面109及一个侧面110构成的角部被倒角了的形状。针对第二模块103也同样。
95.(第二实施方式)
96.在本实施方式中,主要对与第一实施方式不同的部分进行说明。如图11及图12所示,各模块102、103的形状相同但尺寸不同。
97.具体而言,第一模块102比第二模块103大。在y轴方向上,第一模块102的中心位置和第二模块103的中心位置配置在相同的位置。因而,定位部127由第一模块102的另一个侧面111中的与第二模块103接触的部分和第二模块103的另一个侧面116的整体构成。
98.如上所述,即便各模块102、103的尺寸不同,也能够与第一实施方式同样地检测绕x轴及绕z轴的角速度。
99.作为变形例,第一模块102也可以比第二模块103小。另外,在y轴方向上,第一模块102的中心位置和第二模块103的中心位置也可以配置在不同的位置。例如,可以以第一模块102的一个端面108与第二模块103的另一个端面114位于同一面的方式配置各模块102、103。另外,各传感器104、105优选配置在沿着x轴的直线上。
100.(第三实施方式)
101.在本实施方式中,主要对与上述各实施方式不同的部分进行说明。如图13及图14所示,多轴惯性力传感器100除了各模块102、103及各传感器104、105以外,还包括第三模块129、第四模块130、第三传感器131及第四传感器132。
102.第三模块129是具有倾斜面133、一对端面134、135及一对侧面136、137的三棱柱。第四模块130是具有倾斜面138、一对端面139、140及一对侧面141、142的三棱柱。
103.各模块102、103、129、130全部形成为相同的尺寸及相同的形状。与上述各实施方式同样地,第三传感器131与电子部件117一起配置于第三模块129的倾斜面133,第四传感器132与电子部件117一起配置于第四模块130的倾斜面138。
104.基座128通过将第一模块102及第二模块103由第三模块129和第四模块130夹持而组装成山形形状。具体而言,第一模块102及第二模块103沿着x轴配置。另外,第一模块102的另一个侧面111与第二模块103的另一个侧面116相面对且无间隙地配置。
105.第三模块129及第四模块130沿着y轴配置。第三模块129的另一个侧面137与第一模块102的另一个端面109及第二模块103的一个端面113相面对且无间隙地配置。第四模块130的另一个侧面142与第一模块102的一个端面108及第二模块103的另一个端面114相面对且无间隙地配置。
106.各传感器104、105、131、132通过分别配置于基座128的倾斜面107、112、133、138而使主轴分别朝向不同的方向。第一模块102中的各端面108、109的一部分和另一个侧面111以及第二模块103中的各端面113、114的一部分和另一个侧面116成为定位部127。另外,第三模块129中的另一个侧面137的一部分以及第四模块130中的另一个侧面142的一部分成为定位部127。由此,通过各模块102、103、129、130的形状精度来保证各传感器104、105、131、132的主轴的正交精度。
107.接着,对检测三轴的角速度的原理进行说明。首先,将绕y轴的角速度设为俯仰角速度。各传感器104、105、131、132是检测绕z轴的角速度的单轴陀螺仪传感器。
108.首先,在横摆角速度施加到多轴惯性力传感器100上的情况下,向各传感器104、105、131、132施加角速度ωz。与图5所示的情况同样地,在对角速度ωz进行向量分解时,在第一传感器104及第二传感器105的z轴上施加有√2ωz/2的向量分量。
109.另外,如图15所示,在第三传感器131及第四传感器132的z轴上施加有√2ωz/2的向量分量。即,√2ωz/2的角速度向四个传感器104、105、131、132的z轴施加。由于第三传感器131及第四传感器132的各倾斜面133、138相对于安装件101的设置面106以45
°
的角度倾斜,因此,虽然各传感器131、132的等量的角速度会向各其他轴施加,但对各传感器131、132的主轴灵敏度没有影响。
110.在侧倾角速度施加到多轴惯性力传感器100上的情况下,向各传感器104、105、131、132施加角速度ω
x
。与图6所示的情况同样地,在对角速度ω
x
进行向量分解时,在第一传感器104及第二传感器105的z轴上施加有√2ω
x
/2的向量分量。由此,能够根据角速度ω
x
作用的方向来辨别角速度ω
x
的旋转方向。
111.另一方面,如图16所示,在第三传感器131及第四传感器132的第二其他轴上施加有角速度ω
x
。因此,第三传感器131及第四传感器132的主轴灵敏度没有变化。
112.在俯仰角速度施加到多轴惯性力传感器100上的情况下,向各传感器104、105、131、132施加角速度ωy。如图17所示,在对角速度ωy进行向量分解时,在第一传感器104及第二传感器105的第二其他轴上施加有角速度ωy。因此,第一传感器104及第二传感器105的主轴灵敏度没有变化。
113.另一方面,如图18所示,在对角速度ωy进行向量分解时,在第三传感器131及第四传感器132的z轴上施加有√2ωy/2的向量分量。虽然√2ωy/2的角速度会向各其他轴施加,但对第三传感器131及第四传感器132的主轴灵敏度也没有影响。因此,能够根据角速度ωy作用的方向来辨别角速度ωy的旋转方向。
114.根据以上的原理,能够检测三轴的角速度。另外,即便假设各传感器104、105、131、132中的一个损坏,也能够使用剩余的三个来检测三轴的角速度。即,能够确保冗余性。
115.作为变形例,也可以采用以z轴为主轴的加速度传感器来作为各传感器104、105、131、132。这种情况下,也能够基于与上述同样的原理来检测三轴方向的加速度。
116.(第四实施方式)
117.在本实施方式中,主要对与第三实施方式不同的部分进行说明。如图19及图20所示,基座128以第一模块102的另一个端面109及第二模块103的一个端面113与第三模块129的倾斜面133相面对的方式被组装。第三模块129中的由倾斜面133和一个侧面136构成的角部的前端、第一模块102的另一个端面109的一部分及第二模块103的一个端面113的一部分成为定位部127。
118.另外,基座128以第一模块102的一个端面108及第二模块103的另一个端面114与第四模块130的倾斜面138相面对的方式被组装。第四模块130中的由倾斜面138和一个侧面141构成的角部的前端、第一模块102的一个端面108的一部分及第二模块103的另一个端面114的一部分成为定位部127。
119.如以上所述,各模块102、103、129、130无间隙地组装。另外,基座128构成为第三模块129及第四模块130相对于第一模块102及第二模块103进行线接触。
120.(第五实施方式)
121.在本实施方式中,主要对与第三、第四实施方式不同的部分进行说明。如图21及图22所示,基座128以第三模块129的倾斜面133与第四模块130的倾斜面138相面对的方式被组装。第三模块129中的由倾斜面133和一个侧面136构成的角部的前端与第四模块130中的由倾斜面138和一个侧面141构成的角部的前端成为定位部127,彼此触抵。
122.另外,基座128组装成第三模块129及第四模块130被第一模块102和第二模块103夹持的状态。第一模块102的另一个侧面111与第三模块129的另一个端面135及第四模块130的一个端面139相面对且无间隙地配置。第一模块102的另一个侧面111的一部分、第三模块129的另一个端面135的一部分及第四模块130的一个端面139的一部分成为定位部127。
123.第二模块103的另一个侧面116与第三模块129的一个端面134及第四模块130的另一个端面140相面对且无间隙地配置。第二模块103的另一个侧面116的一部分、第三模块129的一个端面134的一部分及第四模块130的另一个端面140的一部分成为定位部127。
124.(第六实施方式)
125.在本实施方式中,主要对与第三~第五实施方式不同的部分进行说明。如图23及图24所示,第一模块102及第二模块103以第一模块102的倾斜面107与第二模块103的倾斜面112相面对且隔有空间的方式配置。第三模块129及第四模块130以第三模块129的倾斜面133与第四模块130的倾斜面138相面对且隔有空间的方式配置。
126.在第三模块129中的由倾斜面133和一个侧面136构成的角部的前端处,一个端面134侧的一个端部143触抵于第二模块103的另一个端面114。在第三模块129中的由倾斜面133和一个侧面136构成的角部的前端处,另一个端面135侧的另一个端部144触抵于第一模块102的一个端面108。第三模块129的各端部143、144、第一模块102的一个端面108的一部
分及第二模块103的另一个端面114的一部分成为定位部127。
127.在第四模块130中的由倾斜面138和一个侧面141构成的角部的前端处,一个端面139侧的一个端部145触抵于第一模块102的另一个端面109。在第四模块130中的由倾斜面138和一个侧面141构成的角部的前端处,另一个端面140侧的另一个端部146触抵于第二模块103的一个端面113。第四模块130的各端部145、146、第二模块103的一个端面113的一部分及第一模块102的另一个端面109的一部分成为定位部127。
128.如以上所述,基座128还可以以在中央部具有空间的方式被组装。即便是这样的基座128,也能通过定位部127来确保各传感器104、105、131、132的轴正交性。
129.(第七实施方式)
130.在本实施方式中,主要对与第六实施方式不同的部分进行说明。如图25及图26所示,第一模块102具有一个切断面147,这一个切断面147通过将第一模块102中的由倾斜面107、一个侧面110及一个端面108构成的一个端部沿着z轴切掉而成。
131.另外,第一模块102具有另一个切断面148,这另一个切断面148通过将第一模块102中的由倾斜面107、一个侧面110及另一个端面109构成的另一个端部沿着z轴切掉而成。
132.同样,第二模块103具有一个切断面149及另一个切断面150。第三模块129具有一个切断面151及另一个切断面152。第四模块130具有一个切断面153及另一个切断面154。
133.第一模块102的一个切断面147与第三模块129的另一个切断面152接触。第一模块102的另一个切断面148与第四模块130的一个切断面153接触。因而,第一模块102的各切断面147、148、第三模块129的另一个切断面152及第四模块130的一个切断面153成为定位部127。
134.第二模块103的一个切断面149与第四模块130的另一个切断面154接触。第二模块103的另一个切断面150与第三模块129的一个切断面151接触。因而,第二模块103的各切断面149、150、第四模块130的另一个切断面154及第三模块129的一个切断面151成为定位部127。
135.如以上所述,基座128也可以以中央部的空间比第六实施方式的情况小的方式被组装。由此,能够使基座128小型化。
136.(第八实施方式)
137.在本实施方式中,主要对与上述各实施方式不同的部分进行说明。如图27所示,第一模块102的一个侧面110与第三模块129的另一个侧面137接触。第一模块102的另一个侧面111与第四模块130的一个侧面141接触。
138.另外,第二模块103的一个侧面115与第四模块130的另一个侧面142接触。第二模块103的另一个侧面116与第三模块129的一个侧面136接触。
139.因而,第一模块102的各侧面110、111、第二模块103的各侧面115、116、第三模块129的各侧面136、137及第四模块130的各侧面141、142成为定位部127。各传感器104、105、131、132的各轴的正交精度通过各模块102、103、129、130的形状精度来保证。
140.另外,各传感器104、105、131、132以相对于第一其他轴及第二其他轴不产生轴偏差的方式安装在各模块102、103、129、130上。各模块102、103、129、130的各倾斜面107、112、133、138的正交精度由加工精度规定,因此,能够确保足够的正交精度。由此,能够实现高的轴正交性。
141.根据上述,基座128通过将各模块102、103、129、130呈长方体状组装来构成。基座128以各模块102、103、129、130的一个端面108、113、134、139位于上表面的方式设置在安装件101的设置面106上。
142.各模块102、103、129、130的各倾斜面107、112、133、138相对于安装件101的设置面106垂直地配置。各倾斜面107、112、133、138的倾斜还包括各倾斜面107、112、133、138相对于设置面106垂直的情况。
143.在本实施方式中,各传感器104、105、131、132是两轴的加速度传感器。第一传感器104及第二传感器105沿着x轴方向配置。第三传感器131及第四传感器132沿着y轴方向配置。
144.x轴方向的加速度由第三传感器131及第四传感器132来检测。y轴方向的加速度由第一传感器104及第二传感器105来检测。z轴方向的加速度由四个传感器104、105、131、132来检测。即便假设各传感器104、105、131、132中的一个损坏,也能够使用剩余的三个来检测三轴的加速度。
145.(第九实施方式)
146.在本实施方式中,主要对与上述各实施方式不同的部分进行说明。如图28~图30所示,第一模块102具有连结部155。连结部155是在与接触对象进行接触时用于与接触对象连结的部分。
147.连结部155例如是嵌合部。如图29所示,连结部155是形成在第一模块102的一个侧面110上的凸部。另外,如图30所示,连结部155是形成在第一模块102的另一个侧面111上的凹部。其他的模块103、129、130也同样地具有连结部155。
148.通过将各模块102、103、129、130中的一个模块的凸部插入另一个模块的凹部,由此将各模块102、103、129、130连结。另外,若在用于固定基座128的安装件101上设有槽,则基座128不歪斜地被安装于安装件101。
149.作为变形例,如图31所示,也可以采用磁铁作为连结部155。磁铁以s极位于第一模块102的一个侧面110的方式埋入到预先形成的槽中。另外,磁铁以n极位于第一模块102的另一个侧面111的方式埋入到预先形成的槽中。或者,如图32所示,磁铁也可以镶嵌成型于第一模块102。在其他的模块103、129、130上也同样地设置磁铁。基座128通过各磁铁的引力而被组装。也可以通过镶嵌成型将第一模块102减轻重量地形成。
150.(第十实施方式)
151.在本实施方式中,主要对与上述各实施方式不同的部分进行说明。在本实施方式中,多轴惯性力传感器100适用于imu(inertial measurement unit:惯性测量单元)。
152.具体而言,如图33所示,imu156除了基座128及各传感器104、105、131、132以外,还具备密封基座157、密封盖158及印制基板159。
153.基座128例如采用图25所示的结构。在各模块102、103、129、130的各倾斜面107、112、133、138上通过mid工艺形成有布线、电极,并且安装有外置部件119、各传感器104、105、131、132、各插座160~163。
154.各传感器104、105、131、132作为真空密封了的z轴陀螺仪传感器来构成。因而,如上所述,通过四个传感器104、105、131、132来检测x轴、y轴及z轴的角速度。各插座160~163是用于取出各传感器104、105、131、132的信号且进行电源供给的连接端口。
155.密封基座157及密封盖158是金属制的框体。密封基座157及密封盖158为高刚性。密封盖158通过设置在密封基座157上的螺纹孔164而被螺纹固定。由此,密封基座157及密封盖158成为不易受到因外界干扰产生的影响的结构。
156.在印制基板159的一面165上安装有基座128、加速度传感器166、多个lsi167、多个电子部件168、多个插座169及外部用插座170。
157.加速度传感器166例如是三轴的加速度传感器。加速度传感器166在印制基板159上搭载有两个。因而,imu156能够进行六轴惯性力的高精度检测。
158.就多个lsi167而言,运算用的lsi167、写入有信号修正用算法的lsi167安装于印制基板159。多个电子部件168是ic、电路部件等。
159.多个插座169与各模块102、103、129、130的各插座160~163对应地安装。各插座169通过fpc(flexible printed circuits)与各插座160~163连接。由此,实现印制基板159与各模块102、103、129、130的各传感器104、105、131、132等的电连接。
160.外部用插座170是用于将imu156的数字信号向外部装置取出的输出端口。印制基板159通过将螺钉穿过设置在密封基座157上的螺纹孔171而固定于密封基座157。
161.如以上所述,能够将多轴惯性力传感器100作为imu156的一部分来构成。另外,加速度传感器166也可以不安装于印制基板159而安装于各模块102、103、129、130。另外,本实施方式的印制基板159与安装件对应,一面165与设置面对应。
162.(第十一实施方式)
163.在本实施方式中,主要对与第十实施方式不同的部分进行说明。如图34所示,imu156具备陶瓷封装件172及盖173。
164.陶瓷封装件172通过固定盖173而被气密密封。气密密封通过使陶瓷封装件172的开口端174上所设置的框状的焊料175熔化来进行。陶瓷封装件172的内部被气密密封成真空。另外,为了将陶瓷封装件172的内部维持成真空,也可以在盖173的背面设置吸气剂膜。或者,还可以在陶瓷封装件172设置固态的吸气剂(getter)。
165.陶瓷封装件172具有多个内部端子176及多个外部端子177。多个内部端子176设置在陶瓷封装件172的内部。多个外部端子177设置在陶瓷封装件172的壁面上。各外部端子177用于输出各传感器104、105、131、132的传感器信号,且用于向各传感器104、105、131、132进行电源供给。各内部端子176与各外部端子177通过内部布线在陶瓷封装件172的内部电连接。
166.基座128直接安装在陶瓷封装件172的底面178上。第一模块102中,由倾斜面107和另一个侧面111构成的角部被倒角且配置有引线接合用的电极焊盘179。其他的模块103、129、130也同样。例如,第二模块103的各电极焊盘180通过引线接合与陶瓷封装件172的各内部端子176电连接。由此,第二传感器105能够被供给电源且能够进行传感器信号的输出。
167.第二传感器105由传感器元件181和asic182构成。第三传感器131由传感器元件183和asic184构成。各传感器元件181、183是z轴陀螺仪传感器元件。各传感器元件181、183作为开放式封装件来构成。各传感器元件181、183也可以采用wlp结构,成为以芯片级被气密密封成真空的形态。这种情况下,陶瓷封装件172的内部只要气密密封即可,无需设为真空。也不需要吸气剂膜。
168.各asic182、184使各传感器元件181、183动作来生成信号。各传感器元件181、183
及各asic182、184通过引线接合与倾斜面112、133的电极电连接。第一传感器104及第四传感器132的结构也与上述同样。
169.另外,在陶瓷封装件172的内部设置有x轴、y轴、z轴的加速度传感器。作为用于实现三轴加速度传感器的方法,也可以将z轴加速度传感器安装在各模块102、103、129、130的各倾斜面107、112、133、138上。或者,还可以将三轴加速度传感器在陶瓷封装件172的底面178上安装两个。就其他的结构而言,也只要有能检测三轴的加速度的传感器即可。在任一方案中,加速度传感器元件都是通过wlp被气密密封为接近大气压的状态。与陀螺仪传感器元件同样地通过引线接合来进行电布线。
170.根据以上的结构,构成能够检测六轴的惯性力的imu156。imu156例如经由焊料安装在自我定位系统的印制基板上。imu156能够不仅通过各模块102、103、129、130还通过高刚性的陶瓷封装件172的相辅相成的效果来进一步阻隔来自外部的应力影响。因此,零点不易因应力而发生变动,能够进行六轴惯性力的高精度检测。
171.另外,本实施方式的陶瓷封装件172与安装件对应,底面178与设置面对应。
172.(第十二实施方式)
173.在本实施方式中,主要对与上述各实施方式不同的部分进行说明。如图35所示,基座128以第三模块129的另一个侧面137及一个端面134为基准而组装成山形形状。
174.具体而言,第二模块103的一个端面113与第三模块129的另一个侧面137接触。第三模块129的一个端面134和第二模块103的另一个侧面116配置成同一面。
175.因而,第二模块103的一个端面113的一部分及第三模块129的另一个侧面137的一部分成为定位部127。
176.第一模块102的另一个侧面111与第三模块129的一个端面134和第二模块103的另一个侧面116这两方接触。第四模块130的另一个侧面142的一部分与第一模块102的一个端面108接触。第四模块130的一个端面139的一部分与第二模块103的另一个侧面116的一部分接触。
177.因而,第一模块102的另一个侧面111的一部分及一个端面108的一部分、以及第二模块103的另一个侧面116的一部分成为定位部127。另外,第三模块129的一个端面134的一部分、以及第四模块130的另一个侧面142的一部分及一个端面139的一部分成为定位部127。
178.如以上所述,第一模块102及第二模块103也可以不配置在一条直线上。同样,第三模块129及第四模块130也可以不配置在一条直线上。
179.作为变形例,在图35所示的各模块102、103、129、130的配置中,还可以以第一模块102的倾斜面107与第二模块103的倾斜面112相面对的方式配置。这种情况下,第三模块129的倾斜面133配置为与第二模块103相面对,且第四模块130的倾斜面138配置为与第一模块102相面对。
180.(第十三实施方式)
181.在本实施方式中,主要对与上述各实施方式不同的部分进行说明。如图36所示,各模块102、103、129、130的尺寸分别不同。例如,尺寸按第一模块102、第二模块103、第三模块129、第四模块130的顺序变大。基座128例如以第一模块102为基准来被组装。另外,各模块102、103、129、130的尺寸适当决定即可。
182.(第十四实施方式)
183.在本实施方式中,主要对与上述各实施方式不同的部分进行说明。如图37所示,在各模块102、103、129、130的尺寸相同的情况下,基座128以第二模块103为基准来被组装。这种情况下,第一模块102、第三模块129及第四模块130彼此不接触。另外,各模块102、103、129、130的尺寸也可以不同。
184.(第十五实施方式)
185.在本实施方式中,主要对与上述各实施方式不同的部分进行说明。如图38所示,在各模块102、103、129、130的尺寸不同的情况下,基座128以第一模块102为基准来被组装。这种情况下,第二模块103、第三模块129及第四模块130彼此不接触。
186.本公开不限定于上述的实施方式,可以在不脱离本公开的主旨的范围内如以下那样进行各种变形。
187.例如,各传感器104、105、131、132也可以不是单轴传感器,而是作为多轴传感器来构成。
188.配置在各模块102、103、129、130的各倾斜面107、112、133、138上的传感器不限定于一个。也可以在各模块102、103、129、130上不仅配置z轴陀螺仪传感器还配置z轴加速度传感器。由此,也能够构成六轴惯性力传感器。
189.第一模块102的各端面108、109也可以不是直角等腰三角形的形状。即,第一模块102的倾斜面107也可以不相对于安装件101的设置面106以45
°
的角度倾斜。
190.各模块102、103、129、130的各倾斜面107、112、133、138只要相对于设置面106倾斜即可。因而,各模块102、103、129、130不仅可以形成为各倾斜面107、112、133、138相对于设置面106以锐角倾斜及垂直地倾斜,还可以形成为以钝角倾斜的形状。
191.即,各模块102、103、129、130也可以不形成为三棱柱而形成为梯形形状、任意的形状。
192.基座128也可以以各模块102、103、129、130中的一个模块的端面与另一个模块的端面相面对的方式被组装。或者,基座128也可以以各模块102、103、129、130中的一个模块的倾斜面与另一个模块的侧面相面对的方式被组装。
193.构成基座128的模块的个数不限定于两个或四个,只要为两个以上即可。基座128不仅可以通过偶数个模块组装而成,还可以通过奇数个模块组装而成。
194.基座128也可以包括倾斜面的方向朝向相同的方向的模块。
195.本公开依据实施例进行了记述,但应理解本公开不限定于这些实施例、结构。本公开还包含各种的变形例及等同范围内的变形。此外,各种组合及形式、进而在其中仅包括一个要素、这以上或这以下的要素的其他的组合及形式也落入本公开的范畴、思想范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。