1.本发明涉及真空泵。
背景技术:
2.半导体制造装置、液晶制造装置、电子显微镜、表面分析装置或精密加工装置等需要使装置内的环境为高度的真空状态。为使这些装置的内部为高度的真空状态而使用真空泵。
3.真空泵例如如专利文献1所示,有在具有旋转翼和固定翼的涡轮分子泵的下游侧设置螺纹槽泵的情况。所谓的霍尔威克型的螺纹槽泵由旋转体的外周面、在旋转体的外周配置的定子构成,在旋转体的外周面或定子的内周面刻设有螺纹槽。
4.专利文献1:日本特开2015-031153号公报
5.但是,为了防止半导体制造等中产生的反应产物堆积,考虑将形成螺纹槽泵的定子保温至反应产物的升华温度以上的技术。然而,若在旋转体的外周配置的定子温度高,则由于热膨胀而旋转体和定子之间的间隙量变大,螺纹槽泵的性能下降。
6.另一方面,真空泵中,除了排气性能以外,还有与上述半导体制造等的各种制造工序对应的最佳内部温度等的规格要求等。以削减在库数量等为目的,有需要借助同一泵来改变内部温度的设定规格的情况。该情况下,由于内部温度的设定规格的改变,因为上述的热膨胀而产生的旋转体和定子之间的间隙量变化。以该间隙量变大的方式变化的情况下,有螺纹槽泵的排气性能下降而成为问题的可能性。
技术实现要素:
7.本发明是为了解决上述问题而作出的,其目的在于,提供能够有效地抑制热膨胀导致的性能的下降的真空泵。
8.实现上述目的的本发明的真空泵具备外装体、旋转体、定子、螺纹槽,前述外装体设置有吸气口,前述旋转体内包于前述外装体,被旋转自如地支承,前述定子配置于前述旋转体的外周,呈大致圆筒状,前述螺纹槽刻设于前述旋转体的外周面或前述定子的内周面的至少一者,通过使前述旋转体旋转,将从前述吸气口侧抽吸的气体向前述外装体外排出,前述真空泵的特征在于,在前述定子的外周配设限制机构,前述限制机构由线膨胀系数比前述定子的材料低的材料形成,使前述定子的热膨胀时的径向的变形减少。
9.发明效果
10.如上所述地构成的真空泵具有使定子的热膨胀时的径向的变形减少的限制机构,所以能够抑制旋转体的外周面和定子的内周面之间的间隙量变大。因此,本真空泵能够有效地抑制热膨胀导致的螺纹槽泵的性能下降。
11.也可以是,前述限制机构配设于前述定子的下游侧的端部。由此,能够抑制未在下游侧将外周面固定的定子的下游侧的端部向径向热膨胀,能够有效地抑制螺纹槽泵的性能下降。
12.也可以是,前述真空泵具有内部温度不同的多个规格,各个前述规格的前述真空泵的轴向的既定位置的前述旋转体的前述外周面与前述定子的前述内周面的间隙量由于前述限制机构而相同。由此,本真空泵在内部温度不同的各个规格中能够有效地维持螺纹槽泵的性能。
13.也可以是,前述定子的热膨胀时从前述限制机构对前述定子作用的应力小于前述定子的材料的屈服应力。由此,能够有效地抑制被限制机构限制而热膨胀时受到应力的定子破损。
附图说明
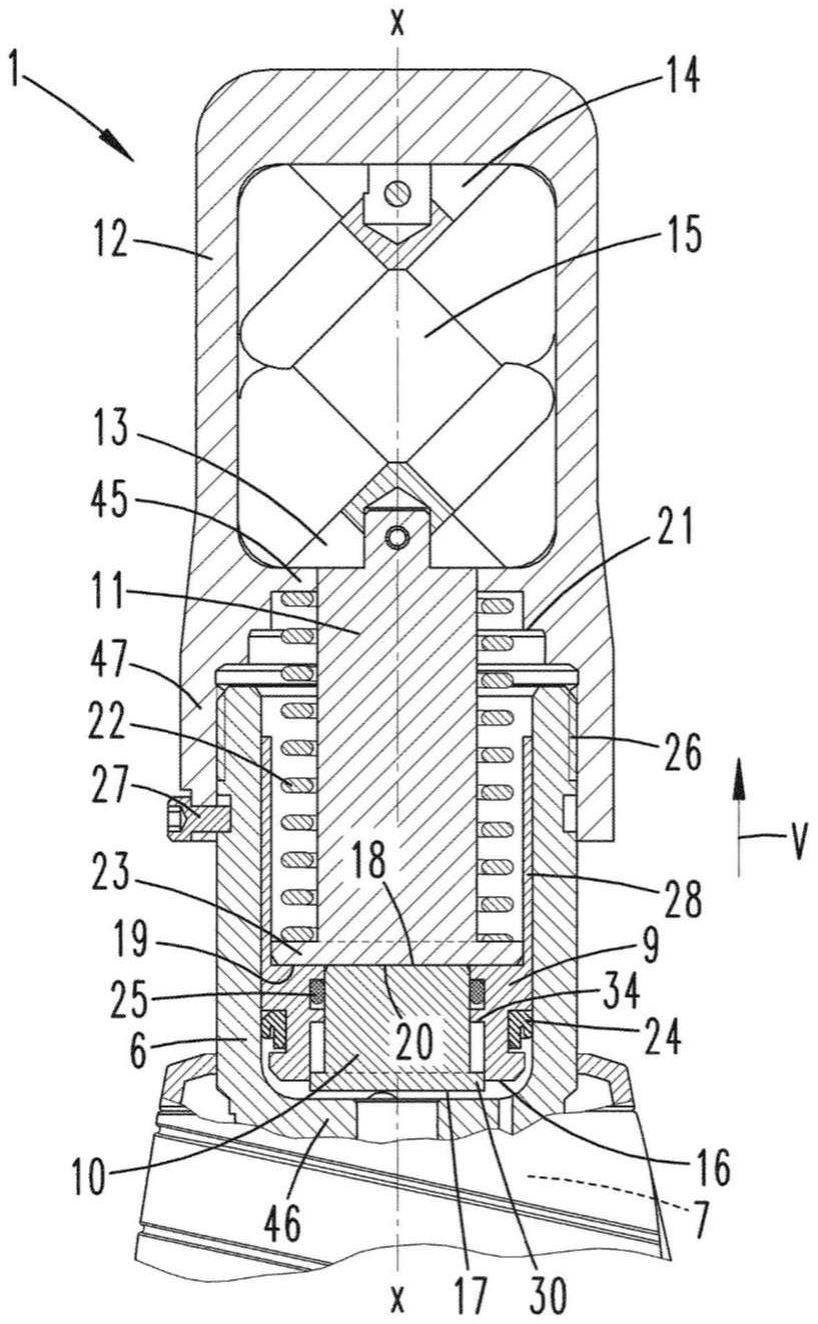
14.图1是真空泵的纵剖视图。
15.图2是放大回路的回路图。
16.图3是表示电流指令值比检测值大的情况的控制的时间图。
17.图4是表示电流指令值比检测值小的情况的控制的时间图。
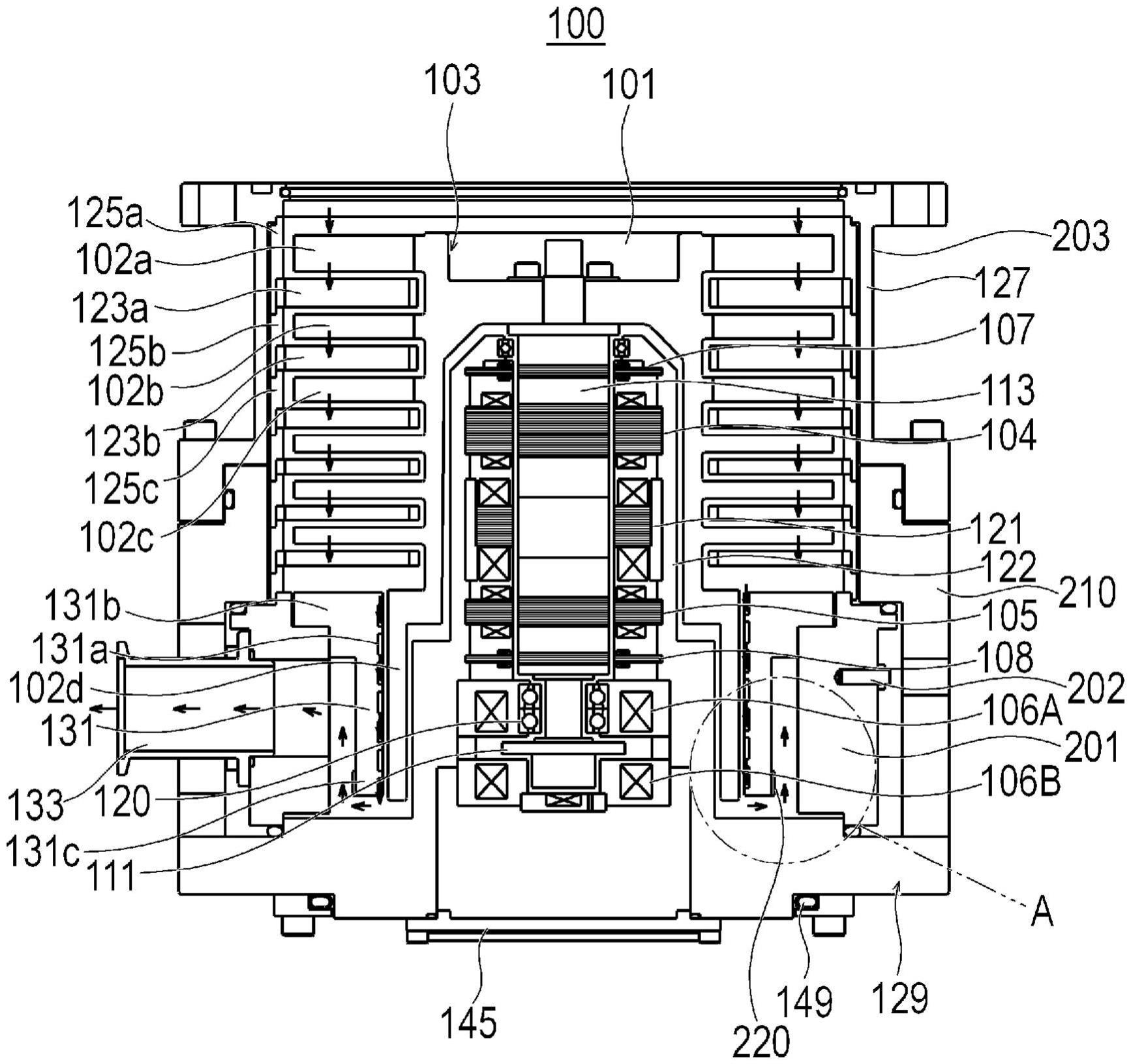
18.图5是实施方式的真空泵的纵剖视图。
19.图6是图5的范围a的放大纵剖视图。
具体实施方式
20.以下,参照附图,对本发明的实施方式进行说明。另外,附图的尺寸有为了方便说明而夸张从而与实际的尺寸不同的情况。此外,本说明书及附图中,关于具有实质相同的功能结构的结构要素标注同一附图标记从而省略重复说明。
21.本发明的实施方式的真空泵是高速旋转的旋转体的旋转叶片将气体分子弹飞从而排出气体的涡轮分子泵100。涡轮分子泵100例如用于从半导体制造装置等的腔抽吸气体来排气。
22.图1表示该涡轮分子泵100的纵剖视图。图1中,涡轮分子泵100在圆筒状的外筒127的上端形成有吸气口101。并且,在外筒127的内侧,具备旋转体103,前述旋转体103将用于将气体抽吸排出的涡轮叶片即多个旋转翼102(102a、102b、102c
···
)在周部放射状且多层地形成。在该旋转体103的中心安装有转子轴113,该转子轴113例如被5轴控制的磁轴承在空中悬浮支承且被位置控制。旋转体103一般由铝或铝合金等的金属构成。
23.上侧径向电磁铁104为4个电磁铁在x轴和y轴上成对地配置。与该上侧径向电磁铁104接近且与上侧径向电磁铁104分别对应地具备4个上侧径向传感器107。上侧径向传感器107例如使用具有传导绕组的电感传感器、涡电流传感器等,基于与转子轴113的位置对应地变化的该传导绕组的电感的变化检测转子轴113的位置。该上侧径向传感器107构成为,检测转子轴113、即固定于该转子轴113的旋转体103的径向位移,送向控制装置200。
24.在该控制装置200中,例如具有pid调节功能的补偿回路基于上侧径向传感器107检测到的位置信号生成上侧径向电磁铁104的励磁控制指令信号,图2所示的放大回路150(后述)基于该励磁控制指令信号对上侧径向电磁铁104进行励磁控制,由此,调整转子轴113的上侧的径向位置。
25.并且,该转子轴113由高透磁率材料(铁、不锈钢等)等形成,由于上侧径向电磁铁104的磁力而被吸引。该调整在x轴方向和y轴方向上分别独立地进行。此外,下侧径向电磁
铁105及下侧径向传感器108被与上侧径向电磁铁104及上侧径向传感器107同样地配置,将转子轴113的下侧的径向位置与上侧的径向位置同样地调整。
26.进而,轴向电磁铁106a、106b配置成在上下夹着转子轴113的下部具备的圆板状的金属盘111。金属盘111由铁等的高透磁率材料构成。为了检测转子轴113的轴向位移而具备轴向传感器109,构成为其轴向位置信号被送向控制装置200。
27.并且,在控制装置200中,例如具有pid调节功能的补偿回路基于被轴向传感器109检测的轴向位置信号生成轴向电磁铁106a和轴向电磁铁106b的各自的励磁控制指令信号,放大回路150基于这些励磁控制指令信号,对轴向电磁铁106a和轴向电磁铁106b分别进行励磁控制,由此,轴向电磁铁106a借助磁力将金属盘111向上方吸引,轴向电磁铁106b将金属盘111向下方吸引,调整转子轴113的轴向位置。
28.这样,控制装置200适当调节该轴向电磁铁106a、106b对金属盘111作用的磁力,使转子轴113在轴向上磁悬浮,在空间上非接触地保持。另外,关于对这些上侧径向电磁铁104、下侧径向电磁铁105及轴向电磁铁106a、106b进行励磁控制的放大回路150在后说明。
29.另一方面,马达121具备以包围转子轴113的方式周状地配置的多个磁极。各磁极被控制装置200控制,使得经由在与转子轴113之间作用的电磁力将转子轴113旋转驱动。此外,图中未示出的例如霍尔元件、分析器、编码器等的旋转速度传感器被装入马达121,借助该旋转速度传感器的检测信号检测转子轴113的旋转速度。
30.进而,例如在下侧径向传感器108附近安装有图中未示出的相位传感器,检测转子轴113的旋转的相位。控制装置200中,一同利用该相位传感器和旋转速度传感器的检测信号检测磁极的位置。
31.与旋转翼102(102a、102b、102c
···
)隔开些许空隙地配设有多个固定翼123(123a、123b、123c
···
)。旋转翼102(102a、102b、102c
···
)为了分别通过碰撞将排出气体的分子向下移送,形成为从与转子轴113的轴线垂直的平面倾斜既定的角度。固定翼123(123a、123b、123c
···
)例如由铝、铁、不锈钢、铜等的金属、或包括这些金属作为成分的合金等的金属构成。
32.此外,固定翼123也同样形成为从与转子轴113的轴线垂直的平面倾斜既定的角度,且被向外筒127的内侧与旋转翼102的层交替地配设。并且,固定翼123的外周端被以嵌插于多个层叠的固定翼间隔件125(125a、125b、125c
···
)之间的状态支承。
33.固定翼间隔件125为环状的部件,例如由铝、铁、不锈钢、铜等的金属、或包括这些金属作为成分的合金等的金属构成。在固定翼间隔件125的外周,隔开些许空隙地固定有外筒127。在外筒127的底部配设有基座部129。在基座部129形成有排气口133,与外部连通。从腔(真空腔)侧进入吸气口101而被向基座部129移送来的排出气体被送向排气口133。
34.进而,根据涡轮分子泵100的用途,在固定翼间隔件125的下部和基座部129之间配设螺纹槽定子131(定子)。螺纹槽定子131是由铝、铜、不锈钢、铁、或以这些金属为成分的合金等的金属构成的圆筒状的部件,在其内周面刻设有多条螺旋状的螺纹槽131a。螺纹槽131a的螺旋的方向为,排出气体的分子在旋转体103的旋转方向上移动时该分子被向排气口133移送的方向。在与旋转体103的旋转翼102(102a、102b、102c
···
)连续的最下部,圆筒部102d垂下。该圆筒部102d的外周面为圆筒状,且向螺纹槽定子131的内周面伸出,与该螺纹槽定子131的内周面隔开既定的间隙量地接近。被旋转翼102及固定翼123向螺纹槽
131a移送来的排出气体被螺纹槽131a引导且被送向基座部129。
35.基座部129是构成涡轮分子泵100的基底部的圆盘状的部件,一般由铁、铝、不锈钢等的金属构成。基座部129将涡轮分子泵100物理性地保持,并且也兼具热的传导路的功能,所以希望使用铁、铝、铜等的具有刚性且热传导率也高的金属。
36.该结构中,旋转翼102与转子轴113一同被马达121旋转驱动时,通过旋转翼102和固定翼123的作用,排出气体被穿过吸气口101从腔抽吸。旋转翼102的旋转速度通常为20000rpm~90000rpm,旋转翼102的末端的周速度达到200m/s~400m/s。被从吸气口101抽吸的排出气体穿过旋转翼102和固定翼123之间,被向基座部129移送。此时,由于排出气体与旋转翼102接触时产生的摩擦热、由马达121产生的热的传导等,旋转翼102的温度上升,但该热通过辐射或排出气体的气体分子等的传导向固定翼123侧传递。
37.固定翼间隔件125在外周部彼此接合,将固定翼123从旋转翼102接收到的热、排出气体与固定翼123接触时产生的摩擦热等向外部传递。
38.另外,上述内容中,说明了螺纹槽定子131在旋转体103的圆筒部102d的外周配设,在螺纹槽定子131的内周面刻设有螺纹槽131a。然而,也有与此相反地在圆筒部102d的外周面刻设螺纹槽、在其周围配置具有圆筒状的内周面的间隔件的情况。
39.此外,根据涡轮分子泵100的用途,也有如下情况:电装部借助定子柱122将周围覆盖,使得被从吸气口101抽吸的气体不会进入由上侧径向电磁铁104、上侧径向传感器107、马达121、下侧径向电磁铁105、下侧径向传感器108、轴向电磁铁106a、106b、轴向传感器109等构成的电装部,该定子柱122内借助冲洗气体保持成既定压。
40.该情况下,在基座部129处配设图中未示出的配管,冲洗气体被穿过该配管地导入。被导入的冲洗气体穿过保护轴承120和转子轴113之间、马达121的转子和定子之间、定子柱122和旋转翼102的内周侧圆筒部之间的间隙,被向排气口133送出。
41.这里,涡轮分子泵100需要基于机种的确定、分别调整的固有的参数(例如,与机种对应的诸多特性)的控制。为了储存该控制参数,上述涡轮分子泵100在其主体内具备电子回路部141。电子回路部141由eep-rom等半导体存储器及用于其存取的半导体元件等电子零件、用于安装它们的基板143等构成。该电子回路部141被容纳于基座部129的例如中央附近的图中未示出的旋转速度传感器的下部,被气密性的底盖145关闭,前述基座部129构成涡轮分子泵100的下部。
42.但是,半导体的制造工序中,被导入腔的工艺气体中,存在具有其压力变得比既定值高或者其温度变得比既定值低时变为固体的性质的物质。在涡轮分子泵100内部,排出气体的压力在吸气口101处最低在排气口133处最高。在工艺气体被从吸气口101向排气口133移送的中途,其压力变得比既定值高、其温度变得比既定值低时,工艺气体呈固体状,在涡轮分子泵100内部附着而堆积。
43.例如,对于al蚀刻装置使用sicl4作为工艺气体的情况下,根据蒸气压曲线可知,低真空(760[torr]~10-2
[torr])且低温(约20[℃])时,固体产物(例如alcl3)析出,在涡轮分子泵100内部附着堆积。由此,工艺气体的析出物在涡轮分子泵100内部堆积时,该堆积物使泵流路变窄,成为使涡轮分子泵100的性能下降的原因。并且,前述产物在排气口133附近、螺纹槽定子131附近的压力高的部分处于容易凝固、附着的状况。
[0044]
因此,为了解决该问题,以往在基座部129等的外周缠绕图中未示出的加热器、环
状的水冷管149,且例如在基座部129处埋入图中未示出的温度传感器(例如热敏电阻),以基于该温度传感器的信号将基座部129的温度保持成恒定的较高的温度(设定温度)的方式进行加热器的加热、水冷管149的冷却的控制(以下称作tms。tms;temperature management system)。
[0045]
接着,关于这样构成的涡轮分子泵100,关于对该上侧径向电磁铁104、下侧径向电磁铁105及轴向电磁铁106a、106b进行励磁控制的放大回路150进行说明。在图2中表示该放大回路150的回路图。
[0046]
图2中,构成上侧径向电磁铁104等的电磁铁绕组151的一端经由晶体管161与电源171的正极171a连接,此外,其另一端经由电流检测回路181及晶体管162与电源171的负极171b连接。并且,晶体管161、162为所谓的功率场效应晶体管,具有二极管与其源-漏间连接的构造。
[0047]
此时,晶体管161构成为,其二极管的阴极端子161a与正极171a连接,并且阳极端子161b与电磁铁绕组151的一端连接。此外,晶体管162构成为,其二极管的阴极端子162a与电流检测回路181连接,并且阳极端子162b与负极171b连接。
[0048]
另一方面,电流再生用的二极管165构成为,其阴极端子165a与电磁铁绕组151的一端连接,并且其阳极端子165b与负极171b连接。此外,与此相同地,电流再生用的二极管166构成为,其阴极端子166a与正极171a连接,并且其阳极端子166b经由电流检测回路181与电磁铁绕组151的另一端连接。并且,电流检测回路181由例如霍尔传感器式电流传感器、电阻元件构成。
[0049]
如上所述地构成的放大回路150与一个电磁铁对应。因此,磁轴承为5轴控制且电磁铁104、105、106a、106b为合计10个的情况下,关于各个电磁铁构成同样的放大回路150,相对于电源171,10个放大回路150被并联地连接。
[0050]
进而,放大控制回路191例如由控制装置200的图中未示出的数字
·
信号
·
处理器部(以下称作dsp部)构成,该放大控制回路191切换晶体管161、162的接通/切断。
[0051]
放大控制回路191将电流检测回路181检测到的电流值(将反映该电流值的信号称作电流检测信号191c)与既定的电流指令值比较。并且,基于该比较结果,确定pwm控制的一个周期即控制周期ts内产生的脉冲宽度的大小(脉冲宽度时间tp1、tp2)。结果,将具有该脉冲宽度的栅极驱动信号191a、191b从放大控制回路191向晶体管161、162的栅极端子输出。
[0052]
另外,旋转体103的旋转速度的加速运转中通过共振点时、定速运转中发生外部扰动时等,需要进行高速且强力的旋转体103的位置控制。因此,为了能够进行流向电磁铁绕组151的电流的急剧的增加(或者减少),作为电源171,例如使用50v左右的高电压。此外,为了电源171的稳定化,通常电容器连接在电源171的正极171a和负极171b之间(图示略)。
[0053]
该结构中,将晶体管161、162的二者接通时,流向电磁铁绕组151的电流(以下称作电磁铁电流il)增加,将二者切断时,电磁铁电流il减少。
[0054]
此外,将晶体管161、162的一者接通而将另一者切断时,所谓的飞轮电流被保持。并且,这样飞轮电流在放大回路150中流动,由此,使放大回路150的磁滞损耗减少,能够将作为回路整体的消耗电力抑制成较低。此外,通过这样地控制晶体管161、162,能够减少在涡轮分子泵100处产生的高调波等高频率噪音。进而,通过借助电流检测回路181测定该飞轮电流,能够检测在电磁铁绕组151流动的电磁铁电流il。
[0055]
即,检测到的电流值比电流指令值小的情况下,如图3所示,在控制周期ts(例如100μ s)中将晶体管161、162的二者以相当于脉冲宽度时间tp1的时间接通1次。因此,该期间中的电磁铁电流il从正极171a朝向负极171b向能够流经晶体管161、162的电流值ilmax(未图示)增加。
[0056]
另一方面,检测到的电流值比电流指令值大的情况下,如图4所示,在控制周期ts中将晶体管161、162的二者以相当于脉冲宽度时间tp2的时间切断1次。因此,该期间中的电磁铁电流il从负极171b朝向正极171a向能够经由二极管165、166再生的电流值ilmin(未图示)减少。
[0057]
并且,哪种情况下,经过脉冲宽度时间tp1、tp2后,均使晶体管161、162中的某一个接通。因此,该期间中,飞轮电流被保持于放大回路150。
[0058]
本实施方式的真空泵除了上述结构以外,如图5所示,具有与螺纹槽定子131连结的高温定子201、容纳于高温定子201的加热体202、配置于高温定子201的外周的下侧外筒210、配置于螺纹槽定子131的外周的限制机构220。
[0059]
下侧外筒210的上端侧与外筒127的下侧连结,下端侧与基座部129的上侧连结。外筒127、下侧外筒210及基座部129构成将旋转体103能够旋转地内包的外装体203。
[0060]
高温定子201呈大致圆筒形状,下端侧经由o型圈连结于基座部129上,上端侧经由o型圈与下侧外筒210的内侧连结。另外,配置加热体202的高温定子201也可以是与螺纹槽定子131一体的构造而不是除了螺纹槽定子131以外的构造。
[0061]
加热体202被插入高温定子201的内部而固定。加热体202与图中未示出的加热体控制装置连接,加热体控制装置控制加热体202的温度。加热体202适当调整高温定子201及螺纹槽定子131的温度,使得维持在比旋转体103的温度高的既定值。
[0062]
螺纹槽定子131呈大致圆筒形状,具有位于上游侧的定子上端部131b和位于下游侧的定子下端部131c。螺纹槽定子131在定子上端部131b与高温定子201的内侧连结。进而,在螺纹槽定子131的外周侧,设置作为至排气口133的气体流路的空间,螺纹槽定子131以定子下端部131c为自由端的方式从定子上端部131b向下侧延伸。定子下端部131c从在内周侧配置的旋转体103的圆筒部102d的外周面隔开间隙地离开,并且从在外周侧配置的高温定子201的内周面隔开间隙地离开。另外,定子下端部131c的外周面也可以不与高温定子201的内周面相向,而与其他部件(例如,外筒127、下侧外筒210等的外装体203、在外装体203的内侧配置的其他定子部件)的内周面相向。
[0063]
限制机构220呈圆筒形状,配置于螺纹槽定子131的外周。限制机构220的内周面与定子下端部131c的外周面接触。限制机构220例如压入定子下端部131c而固定。另外,限制机构220向螺纹槽定子131固定的固定方法没有特别限定,例如也可以借助螺栓等来固定。限制机构220的外周面隔开间隙地与高温定子201的内周面相向。限制机构220的内周面及外周面的轴向侧的边缘部优选地以曲面或平面倒角。另外,作为圆筒形状的限制机构220的轴向是指将圆筒的两个开口部的中心连结的方向。
[0064]
限制机构220的轴向的长度及径向的壁厚未被特别限定。限制机构220由线膨胀系数比螺纹槽定子131的材料低的材料形成。例如,螺纹槽定子131的材料为铝或铝合金的情况下,限制机构220的材料例如能够适当地使用不锈钢、陶瓷、钛合金等。不锈钢没有特别限定,但例如能够适当地使用sus403、sus405、sus410、sus430等sus400系不锈钢。
[0065]
另外,限制机构220的外周面也可以不与高温定子201的内周面相向,而与其他部件(例如,外筒127、下侧外筒210等的外装体203、在外装体203的内侧配置的其他定子部件)的内周面相向。限制机构220的形状是向轴向具有恒定的内径及外径的圆筒形状,但不限于此。例如,限制机构220的外径也可以不向轴向恒定。
[0066]
接着,对上述的真空泵的作用进行说明。真空泵的旋转轴113被作为驱动机构的马达121驱动时,旋转体103旋转。由此,由于旋转叶片102和静止叶片123的作用,穿过吸气口101从腔抽吸排出气体。
[0067]
从吸气口101抽吸的排出气体被由旋转叶片102和静止叶片123形成的涡轮分子泵机构向下游侧移送。向下游侧移送来的排出气体被向由旋转体103的圆筒部102d及螺纹槽定子131形成的霍尔威克型泵机构引导后,被向排气口133移送。
[0068]
螺纹槽定子131及高温定子201为了防止由于半导体制造等而产生的反应产物堆积而被加热体202加热。圆筒部102d及螺纹槽定子131由具有相同程度的线膨胀系数的材料形成的情况下,若没有限制机构220,则比圆筒部102d高的温度的螺纹槽定子131比圆筒部102d大地热膨胀。作为一例,圆筒部102d及螺纹槽定子131为铝制,限制机构220为不锈钢制。另外,内侧的圆筒部102d也由于离心力而扩径,但即使考虑该扩径量,螺纹槽定子131也容易比圆筒部102d大地热膨胀。因此,没有限制机构220的情况下,圆筒部102d的外周面和螺纹槽定子131的内周面之间的间隙量变大,螺纹槽泵的性能下降。然而,在螺纹槽定子131的外周,配置由线膨胀系数比螺纹槽定子131的材料低的材料形成的限制机构220。限制机构220即使被加热至与螺纹槽定子131相同的温度,也不会像螺纹槽定子131那样地热膨胀。因此,借助限制机构220抑制螺纹槽定子131向径向外侧的热膨胀。因此,能够适当地维持供气体流动的圆筒部102d的外周面和螺纹槽定子131的内周面之间的间隙量。
[0069]
限制机构220为圆筒形状,所以是周向上均匀的构造,且外周从其他部件离开。因此,限制机构220能够以周向上均匀的限制力限制螺纹槽定子131,所以能够将圆筒部102d的外周面和螺纹槽定子131的内周面之间的间隙量以适当的量均匀地维持。
[0070]
本真空泵也可以具有内部温度不同的多个规格。作为一例,真空泵的霍尔威克型泵机构的内部温度以70℃~200℃的范围设定。霍尔威克型泵机构的内部温度是指构成该泵机构的零件(圆筒部102d及/或螺纹槽定子131)的温度。各个规格(内部温度)的本真空泵的圆筒部102d的外周面和螺纹槽定子131的内周面之间的间隙量优选地处于适当的范围内,更优选为大致恒定,进一步优选为恒定。即,优选地,即使内部温度在规格的范围内变化,通过在螺纹槽定子131的外周设置限制机构220,圆筒部102d的外周面和螺纹槽定子131的内周面之间的间隙量也大致不变化。另外,圆筒部102d的外周面和螺纹槽定子131的内周面之间的适当的间隙量例如是200~1000μm。另外,由于旋转体103的旋转引起的振动,圆筒部102d的外周面和螺纹槽定子131的内周面之间的间隙量会在转一周的期间变化。也可以是,真空泵在被计量的旋转体103的振动到达阈值(例如100μm)的情况下发出警告音,使得圆筒部102d的外周面和螺纹槽定子131的内周面不接触。
[0071]
螺纹槽定子131及限制机构220的温度上升时,螺纹槽定子131从限制机构220接受到应力。螺纹槽定子131有由像铝、铝合金这样与不锈钢等相比更容易变形的材料构成的情况。因此,优选地,从限制机构220对螺纹槽定子131作用的应力比螺纹槽定子131的材料的屈服应力小,使得螺纹槽定子131不会塑性变形。特别地,优选地,真空泵在具有螺纹槽定子
131的内部温度不同的多个规格的情况下,各个规格(内部温度)的从限制机构220向螺纹槽定子131作用的应力比螺纹槽定子131的材料的屈服应力小。即,即使内部温度在规格的范围内变化,对螺纹槽定子131作用的应力也总比屈服应力小,能够抑制螺纹槽定子131的塑性变形。
[0072]
如上所述,本实施方式的真空泵具备设置有吸气口101的外装体203、内包于外装体203而被旋转自如地支承的旋转体103、在旋转体103的外周配置的大致圆筒状的螺纹槽定子131、刻设于旋转体103的外周面或螺纹槽定子131的内周面的至少一者的螺纹槽131a,通过使旋转体103旋转,将从吸气口101侧抽吸的气体向外装体203外排出,前述真空泵的特征在于,在螺纹槽定子131的外周配设限制机构220,前述限制机构220由线膨胀系数比螺纹槽定子131的材料低的材料形成,使螺纹槽定子131的热膨胀时的径向的变形减少。由此,真空泵由于具备使螺纹槽定子131的热膨胀时的径向的变形减少的限制机构220,能够抑制旋转体103的外周面和螺纹槽定子131的内周面之间的间隙量变大。因此,本真空泵能够有效地抑制热膨胀导致的螺纹槽泵的性能的下降。
[0073]
此外,限制机构220配设于螺纹槽定子131的下游侧的端部。由此,能够抑制未在下游侧将外周面固定的螺纹槽定子131的下游侧的端部向径向热膨胀,能够有效地抑制螺纹槽泵的性能下降。
[0074]
此外,也可以是,真空泵具有内部温度不同的多个规格,各个规格的真空泵的轴向的既定位置103的旋转体的外周面与定子131的内周面的间隙量由于限制机构220而相同。由此,本真空泵在内部温度不同的各个规格中能够有效地维持螺纹槽泵的性能。
[0075]
此外,也可以是,螺纹槽定子131的热膨胀时从限制机构220对螺纹槽定子131作用的应力小于螺纹槽定子131的材料的屈服应力。由此,能够有效地抑制被限制机构220限制而热膨胀时受到应力的螺纹槽定子131破损。
[0076]
另外,本发明不仅限于上述实施方式,本领域技术人员能够在本发明的技术构思内进行各种改变。例如,在本实施方式中,圆筒部102d的外周面平滑而在螺纹槽定子131的内周面形成有螺纹槽,但也可以在圆筒部102d的外周面形成螺纹槽而该外侧的定子的内周面平滑。此外,真空泵的下游侧的螺纹槽泵也可以将西格巴恩型泵机构和霍尔威克型泵机构组合形成。此外,螺纹槽定子131也可以是相对于高温定子201在下游侧的端部连结的构造、在流动方向的中央部连结的构造。因此,限制机构220也可以不配设于螺纹槽定子131的上游侧的端部而配设于上游侧的端部、流动方向的中央部。
[0077]
附图标记说明
[0078]
100 涡轮分子泵
[0079]
101 吸气口
[0080]
102d 圆筒部
[0081]
103 旋转体
[0082]
131 螺纹槽定子(定子)
[0083]
131a 螺纹槽
[0084]
131b 定子上端部
[0085]
131c 定子下端部
[0086]
133 排气口
[0087]
201 高温定子
[0088]
202 加热体
[0089]
203 外装体
[0090]
220 限制机构。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。