技术特征:
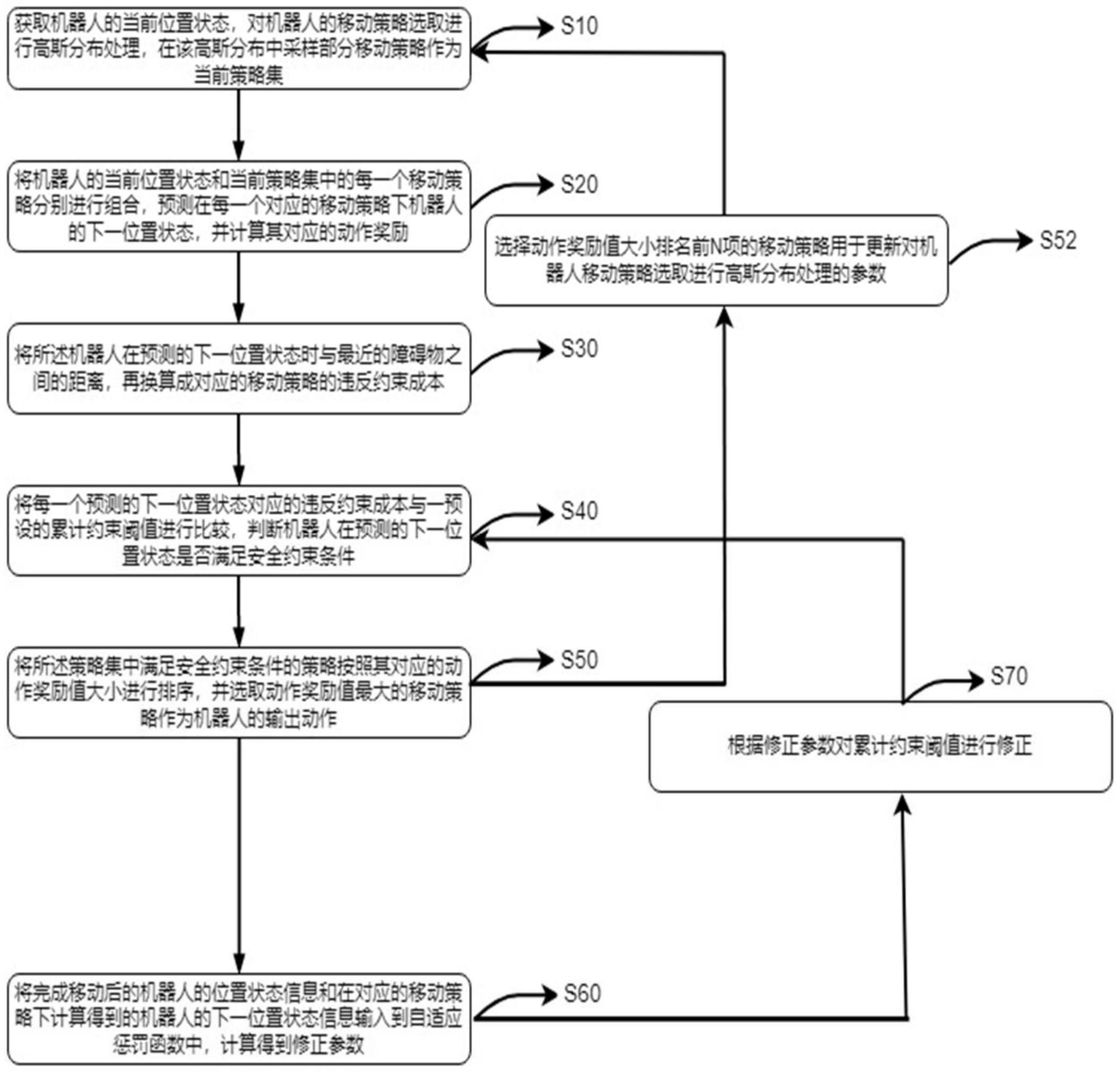
1.一种双无人车动态轨迹跟踪与避障自适应鲁棒控制方法,所述双无人车包括侦察车和救援车,其特征在于,包括以下步骤:步骤1)、基于拉格朗日建模方法,建立侦察车和救援车统一的无人车动力学模型;步骤2)、根据控制目标,建立侦察车所需要的目标到达约束,救援车所需要的轨迹跟踪约束和避障约束的数学模型;步骤3)、基于约束跟随理论对步骤2)建立的到达约束、轨迹约束和避障约束的数学模型进行分析,构建约束跟随误差,作为控制器设计的控制对象;步骤4)、基于步骤1)建立的无人车动力学模型,确定综合描述系统不确定性界值的函数,结合步骤2)中得到的数学模型,以及步骤3)构建的约束跟踪误差,构建自适应律与自适应鲁棒控制器。2.根据权利要求1所述的双无人车动态轨迹跟踪与避障自适应鲁棒控制方法,其特征在于,步骤1)中,基于拉格朗日建模方法,建立侦察车和救援车统一的无人车动力学模型,具体为:其中是不确定性,t表示时间,q(t)∈r
n
表示坐标,其为时间的函数,分别为速度与加速度,m(q,σ,t)是惯性矩阵,是科里奥利离心力,g(q,σ,t)是重力,是摩擦力及其他外部的干扰,τ∈r
n
是控制输入;针对系统的不确定性处理问题,对该模型进行分解,把动力学模型分解成标称部分和不确定部分:不确定部分:不确定部分:不确定部分:其中是标称部分,δm(
·
),δc(
·
),δg(
·
),δf(
·
)为不确定部分。3.根据权利要求2所述的无人车轨迹跟踪与避障自适应鲁棒控制方法,其特征在于,步骤2)中,根据控制目标,建立侦察车所需要的目标到达约束,救援车所需要的轨迹跟踪约束和避障约束的数学模型,并以一阶约束和二阶约束的形式表达,具体为:(1)侦察车的到达约束:定义到达约束的数学模型:e1(t):=h2(q(t))-s2,其中:e1(t)即为到达约束的数学模型,q(t)为侦察车坐标,为到达目标参考点坐标,s为目标到达区域的半径;求导,得到到达一阶伺服约束的数学模型:
其中l是一个常数且l>0;求二阶导得到到达二阶伺服约束的数学模型:从而得到到达约束矩阵:到达约束向量:c1(q(t))=ls
2-lh(q(t)),(2)救援车的轨迹跟踪约束:定义轨迹跟踪约束的数学模型:e2(t)=q2(t)-q1(t),其中e2(t)为轨迹跟踪约束的数学模型,q1(t)为侦察车轨迹的坐标,q2(t)为救援车的坐标;求导,得到轨迹跟踪一阶约束的数学模型:求二阶导数得到轨迹跟踪二阶约束的数学模型:从而得到轨迹跟踪约束矩阵:a2(q(t))=[1 1];轨迹跟踪约束向量:轨迹跟踪约束向量:(3)救援车避障约束:定义避障约束的数学模型:e3(t)=ln(k-f),其中:f=||q(t)-q0||,e3(t)为避障约束的数学模型,q(t)为救援车的坐标,q0是障碍物坐标,k是安全范围的半径;求导,得到避障一阶约束的数学模型:求二阶导数得到避障二阶约束的数学模型:
从而得到避障约束矩阵:避障约束向量:c3(q(t))=0,4.根据权利要求3所述的双无人车动态轨迹跟踪与避障自适应鲁棒控制方法,其特征在于,基于约束跟随理论对步骤2)建立的到达约束、轨迹约束和避障约束的数学模型进行分析,构建约束跟随误差,作为控制器设计的控制对象,具体方法为:构建到达约束的约束跟随误差:构建轨迹跟踪约束的约束跟随误差:构建避障约束的约束跟随误差:包含到达约束的跟随误差β1、轨迹跟踪的约束跟随误差β2和避障约束的跟随误差β3的约束跟随误差向量为:β=[β1,β2,β3]
t
,为了简化书写,后文中使用q,代替q(t),5.根据权利要求4所述的双无人车动态轨迹跟踪与避障自适应鲁棒控制方法,其特征在于,步骤4)中,基于步骤1)建立的无人车动力学模型,确定综合描述系统不确定性界值的函数,结合步骤2)中得到的约束矩阵、约束向量,以及步骤3)构建的约束跟踪误差,构建自适应律与自适应鲁棒控制器,具体方法为:基于步骤1)的无人车动力学模型,分析其不确定性,确定不确定性参数σ的一般形式,并通过以下不等式进行放缩变换,得到综合描述系统不确定性界值的函数π(
·
):其中其中其中
其中α是函数π(
·
)中的不确定性变量,κ是控制增益,p是转移矩阵,ρ
e
>-1为常数,a是综合步骤2)中的约束矩阵,表示为a=[a1(q),a2(q),a3(q)]
t
,c是综合两种约束的约束向量,表示为c=[c1(q),c2(q),c3(q)]
t
;;(
·
)-1
表示矩阵的逆,(
·
)
t
表示矩阵的转置;基于步骤2)构建的综合三种约束的约束跟随误差β,以及本步骤所构建的函数π(
·
),构建能够自评估不确定性变量α的自适应律:其中是对α的估计值,k1,k2>0为设计参数;设计如下自适应鲁棒鲁棒控制器:其中为下式其中其中其中ξ>0为常数。6.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时,实现权利要求1-5任一项所述的方法,进行双无人车动态轨迹跟踪与避障自适应鲁棒控制。
技术总结
本发明公开一种双无人车轨迹跟踪与避障自适应鲁棒控制方法,分为以下步骤:步骤1)、建立侦察车和救援车统一的无人车动力学模型;步骤2)、根据控制目标,建立侦察车所需要的目标到达约束,救援车所需要的轨迹跟踪约束和避障约束的数学模型;步骤3)、基于约束跟随理论对步骤2)建立的到达约束、轨迹约束和避障约束的数学模型进行分析,构建约束跟随误差,作为控制器设计的控制对象;步骤4)、基于步骤1)建立的无人车动力学模型,确定综合描述系统不确定性界值的函数,结合数学模型,以及约束跟踪误差,构建自适应律与自适应鲁棒控制器。本发明能够解决双无人车系统中侦察车目标到达、救援车轨迹跟踪与避障的问题,并具有优秀的控制性能。能。能。
技术研发人员:孙芹芹 王修业 吴子潇
受保护的技术使用者:南京理工大学
技术研发日:2023.03.02
技术公布日:2023/7/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。