使用超控比例-积分-微分(pid)控制器在真空发生系统中提供控制稳定性的方法和系统
1.优先权声明
2.本技术要求2020年9月14日提交的发明名称为“methods and systems for providing control stability in a vacuum generation system using an override proportional-integral-derivative(pid)controller”的美国临时专利申请序列号63/077,757的优先权,该专利申请的发明人是brian t.chiem,其全部内容通过援引并入本文,如同在本文中全部完整地阐述一样。
技术领域
3.本公开总体上涉及用于使用超控比例-积分-微分(pid)控制器在真空发生系统中提供控制稳定性的方法和系统。
背景技术:
4.在小切口手术期间,特别是在眼科手术期间,将小探针插入手术部位以切割、去除或以其他方式操纵组织。在这些手术过程中,流体和组织可能从手术部位被抽吸。
5.流体和组织被抽吸的眼科手术的示例包括玻璃体视网膜手术。玻璃体视网膜手术可以包括被执行用于恢复、保护和增强视力的各种手术。玻璃体视网膜手术可以适用于治疗眼睛后部的许多严重病症。玻璃体视网膜手术可以治疗以下病症:比如年龄相关性黄斑变性(amd)、糖尿病性视网膜病变和糖尿病性玻璃体出血、黄斑裂孔、视网膜脱落、视网膜前膜、cmv视网膜炎、以及许多其他眼科病症。为了治疗眼睛后部的某些病症,医生可能将玻璃体切割术作为正在进行的玻璃体视网膜手术的一部分首先进行。玻璃体切割术是指手术切除玻璃体,玻璃体是眼睛的中心、正常情况下是透明的凝胶状物质。玻璃体可以占眼睛体积的大约三分之二,使其在出生前就具有形态和形状。
6.玻璃体的去除可能涉及玻璃体切割器(也称为“切割器”或“玻璃体切割器”)。在一些示例中,玻璃体切割器可以由包括一个或多个气动阀(又称为驱动阀)的气动玻璃体切除机(例如,“手术控制台”)提供动力。在这样的示例中,玻璃体切割器可以像微型截切机一样工作,带有振荡显微切割器用于以受控的方式去除玻璃体凝胶。在一些其他示例中,玻璃体切割器可以使用激光或比如超声的一些其他技术来切割玻璃体。除了切割玻璃体之外,切割器还可以被配置为抽吸手术切割下来的玻璃体。抽吸可以由真空发生器(例如,文丘里真空)提供,该真空发生器通过提供抽吸通道的管联接到切割器。
7.流体和组织被抽吸的眼科手术的其他示例包括超声乳化术,这是指白内障手术,其中患病的晶状体被乳化并从晶状体囊中吸出。在一些示例中,超声乳化术探针可以通过超声(或其他技术,比如激光等)来打碎晶状体。为了抽吸被打碎的晶状体,超声乳化术探针可以由真空发生器(例如,文丘里真空)提供动力,真空发生器通过提供抽吸通道的管联接到超声乳化术探针。
8.某些现有的真空发生器,比如某些现有的文丘里真空发生器,使用压缩空气流过
产生真空压力的孔来操作。然而,这些真空发生器的一个共同特性是,超过一定量的供应压力时,随着供应压力的增加,真空发生器变得效率降低并且产生的真空压力变小。例如,真空压力随着供应空气压力在0-60psig(磅/平方英寸表压)范围内的增加而增加。然而,随着供应空气压力在60-87psig范围内增加,真空压力开始下降。更具体地,当供应空气压力达到例如60psig左右或更高时,真空压力开始下降,从而引起用于调节供应空气压力的标准pid控制器驱动至不稳定。在这样的示例中,当供应空气压力在0-60psig的范围内时,真空发生器可以被称为在单调区域中操作。另一方面,当供应空气压力高于例如60psig时,真空发生器可以被称为在非单调区域或递减区域中操作。虽然在上面的示例中使用了60psig,但应该理解,也可以考虑其他供应空气压力值。
技术实现要素:
9.本公开总体上涉及用于使用超控比例-积分-微分(pid)控制器在真空发生系统中提供控制稳定性的方法和系统。
10.某些实施例提供了一种控制真空发生系统中的真空压力的方法。该方法包括接收真空压力传感器的真空压力传感器读数。该方法进一步包括计算真空压力传感器读数与真空压力设定点之间的第一误差。该方法进一步包括基于第一误差计算用于控制比例阀的第一电压水平。该方法进一步包括接收供应空气压力传感器的供应空气压力传感器读数。该方法进一步包括计算空气压力传感器读数与供应空气压力设定点之间的第二误差。该方法进一步包括基于第二误差计算用于控制比例阀的第二电压水平。该方法进一步包括确定第一电压水平和第二电压水平中的较低电压水平。该方法进一步包括向比例阀提供较低电压水平。该方法进一步包括使用比例阀基于较低电压水平向真空发生器提供供应空气压力。该方法进一步包括使用真空发生器向手术工具提供基于供应空气压力的真空压力。
11.某些实施例提供了一种真空发生系统。真空发生系统包括第一比例-积分-微分(pid)控制器,该控制器被配置为接收与真空发生器相关联的真空压力传感器读数与真空压力设定点之间的第一误差,并基于第一误差计算用于控制比例阀的第一电压水平。真空发生系统进一步包括第二pid控制器,该控制器被配置为接收供应空气压力传感器读数与供应空气压力设定点之间的第二误差,并基于第二误差计算第二电压水平。真空发生系统包括确定第一电压水平和第二电压水平中的较低电压水平。真空发生系统进一步包括比例阀,该比例阀被配置为接收较低电压水平,并基于该电压水平使供应空气压力提供给真空发生器。真空发生系统进一步包括真空发生器,该真空发生器被配置为向手术工具提供基于供应空气压力的真空压力。
12.某些实施例提供了一种真空发生系统,该真空发生系统包括:存储器,该存储器包括可执行指令;与存储器进行数据通信并被配置为执行指令的处理器,将处理器配置为:接收与真空发生器相关联的真空压力传感器读数与真空压力设定点之间的第一误差;基于第一误差计算第一电压水平;接收供应空气压力传感器读数与供应空气压力设定点之间的第二误差;基于所述第二误差计算第二电压水平;确定第一电压水平和第二电压水平中的较低电压水平并将较低电压水平提供给比例阀。真空发生系统进一步包括比例阀,该比例阀被配置为基于较低电压水平使供应空气压力提供给真空发生器。真空发生系统进一步包括真空发生器,该真空发生器被配置为向手术工具提供基于供应空气压力的真空压力。
13.以下描述和相关附图详细阐述了一个或多个实施例的某些说明性特征。
附图说明
14.附图仅描绘了本公开的某些实施例的示例并且因此不应视为限制本公开的范围。
15.图1图示了根据某些实施例的示例性手术控制台。
16.图2图示了根据某些实施例的示例性玻璃体切割术探针。
17.图3图示了根据某些实施例的图2的玻璃体切割术探针的侧视图。
18.图4图示了根据某些实施例的图2的玻璃体切割术探针的示例性切割机构。
19.图5图示了根据某些实施例的示例性超声乳化术探针。
20.图6图示了根据某些实施例的现有技术真空发生系统。
21.图7图示了根据某些实施例的与图6的现有技术真空发生系统相关联的真空发生性能图。
22.图8图示了根据某些实施例的具有超控pid控制器的示例性示意真空发生系统。
23.图9图示了根据某些实施例的具有超控pid控制器的示例性示意真空发生系统。
24.图10图示了根据某些实施例的图8的真空发生系统的示例性操作。
25.为了便于理解,在可能的情况下,使用相同的附图标记来表示附图中共有的相同元件。设想到了,一个实施例的元件和特征可以有益地结合在其他实施例中,而无需进一步叙述。
具体实施方式
26.虽然本公开的特征可以结合下面的某些实施例和附图进行讨论,但是本发明的所有实施例可以包括本文讨论的一个或多个有利特征。换句话说,虽然一个或多个实施例可以被讨论为具有某些有利特征,但是也可以根据本文讨论的各种其他实施例来使用这样的特征中的一个或多个特征。以类似的方式,虽然示例性实施例可以在下面讨论为装置、器械或方法实施例,但是应当理解,这样的示例性实施例可以在各种装置、器械和方法中实施。
27.图1图示了根据某些实施例的手术控制台101的示例。手术控制台101可以被配置为驱动一个或多个工具103,工具可以包括玻璃体切割器、超声乳化术探针、以及具有抽吸功能的其他工具。在操作中,手术控制台101可以起到辅助医生进行各种眼科手术的作用,眼科手术是比如玻璃体切割术、超声乳化术以及类似手术。在工具103是玻璃体切割器的实施例中,手术控制台101包括一个或多个模块或部件用于为玻璃体切割器提供动力以达到切割玻璃体的目的。例如,在某些实施例中,手术控制台101可以包括气动模块,该气动模块使用比如氮气的压缩气体来为玻璃体切割器提供动力。在某些其他实施例中,手术控制台101可以包括用于产生激光的激光源,玻璃体切割器使用激光来切割玻璃体。在工具103是超声乳化术探针的实施例中,手术控制台101包括一个或多个模块或部件用于在白内障手术期间为超声乳化术探针提供动力以使晶状体乳化。
28.手术控制台101可以包括用于向用户显示信息的显示器109(该显示器还可以结合用于接收用户输入的触摸屏)。手术控制台101还可以包括联接到端口107的真空发生器。工具103通过连接到端口107的管线105可操作地联接到真空发生器。真空发生器在工具103的尖端产生真空,这引起手术切割下来或乳化的材料或组织被用真空吸入到工具103中并沿
着管线105输送到手术控制台101。应注意,管线105可以代表可以将工具103与手术控制台101联接的多个管。例如,管线105可以代表用于为工具103提供动力以达到切割目的的气动管线或光纤缆线以及用于将抽吸出的材料输送回手术控制台101的抽吸管线或真空管线。
29.图2和图3分别图示了根据本文中所述的某些实施例的示例性玻璃体切割器203的立体图和侧视图。因此,为了清楚起见,一起描述图2和图3。玻璃体切割器203是工具103的示例。如图2和图3中描绘的,玻璃体切割器203包括探针210和基座单元220。探针210部分地和纵向地穿设于基座单元220的远端221并且可以在基座单元220的内部腔室中直接或间接地附接到该远端上。探针210可以插入眼睛中以进行玻璃体切割术。应注意,如本文中所述,部件的远端或远侧部分是指在其使用期间更靠近患者身体的端部或部分。另一方面,部件的近端或近侧部分是指距离患者身体较远的端部或部分。
30.基座单元220进一步在其近端225处提供端口223,供一根或多根供应管线敷设到基座单元220的内部腔室中。在某些实施例中,端口223可以代表两个或更多个端口。在某些实施例中,端口223可以提供基座单元220与真空发生器(例如,手术控制台101中的真空发生器)的管或真空管线(例如,图1的管线105)之间的连接以用于抽吸。在某些实施例中,端口223可以提供与光纤缆线的连接,该光纤缆线联接到一个或多个(例如,在手术控制台101中的)激光源以提供由玻璃体切割器203用来切割玻璃体的激光。在某些实施例中,端口223可以提供与气动管线的连接,该气动管线联接(例如,在手术控制台101中的)气动模块,气动模块使用比如氮气的压缩气体来为玻璃体切割器203提供动力以切割玻璃体。应注意,可以使用如本领域普通技术人员所了解的其他技术为玻璃体切割器203提供动力。如结合图4进一步描述的,玻璃体切割器203包括在探针210的远侧部分的切割端口216。在某些实施例中,玻璃体切割器203能够切割玻璃体并通过这个端口216抽吸玻璃体。
31.图4图示了结合图2和图3的玻璃体切割器203使用的切割机构的示例。更具体地,图4图示了玻璃体切割器203的探针210的远端,远端探针210容置用作切割装置的探针切割器425。探针切割器425在探针210内往复运动。在某些实施例中,探针切割器425是具有锋利尖端的中空管。在某些实施例中,探针切割器425包括切割器端口,该切割器端口类似于探针切割器425的切割器端口216并与之相互作用以提高切割效率和有效性。当探针切割器425前后移动时,探针切割器425可以用探针切割器425的锋利尖端来交替地打开和关闭切割器端口216。探针切割器425穿过探针210的远端的每个循环都可以在探针切割器425正在关闭时切穿在切割器端口216中的材料(比如玻璃体)。然后通过探针210抽吸手术切割下来的玻璃体。在某些实施例中,手术切割下来的玻璃体从探针切割器425的外表面与探针210的内表面之间的圆形区域被抽吸出。在某些实施例中,另外或取而代之,通过探针切割器425(例如,通过其中空隔室)抽吸手术切割下来的玻璃体。
32.应注意,图2和图3仅图示了玻璃体切割器的一个示例。并且,图4仅图示了可以用作玻璃体切割器的一部分的切割机构的一个示例。如上所述,可以取而代之使用激光或其他机构。进一步地,工具103可以是超声乳化术探针,比如图5中所示的超声乳化术探针。
33.图5图示了示例性超声乳化术探针503,其包括手持件本体520和可以插入眼睛中以进行超声乳化术的探针510。切割尖端516延伸超过探针510的远端。切割尖端516是中空圆柱形管或轴,其传播由超声功率线524提供的超声波。超声波使晶状体乳化。切割尖端516还提供了抽吸端口518,由于抽吸管线523提供的真空压力,乳化的晶状体通过抽吸端口被
抽吸。探针510还有冲洗端口,用于在超声乳化术过程中冲洗晶状体。应注意,图5仅图示了超声乳化术探针的一个示例。并且,图5仅图示了可以用作超声乳化术探针的一部分的乳化机构的一个示例。
34.如上所述,可以用于使工具103(例如,玻璃体切割器203、超声乳化术探针503等)能够从手术部位(例如,患者的眼睛)抽吸材料的某些现有真空发生器使用压缩空气流过产生真空压力的孔口进行操作。然而,这些真空发生器的一个共同特性是,超过一定量的供应空气压力,随着供应空气压力的增加,真空发生器变得效率降低,并且产生的真空压力变小。图6图示了这些真空发生器的示例性操作。
35.图6图示了高级图,该高级图图示了示例性现有技术真空发生系统600的操作。如图所示,真空发生系统600包括产生真空压力的真空发生器650,比如文丘里真空。如上所述,真空发生系统600可以定位在联接到工具103的手术控制台(例如,手术控制台101)中。如此,真空发生系统600提供的真空压力可以用于上述抽吸过程。真空发生系统600还包括比例阀652。真空发生器650以供应空气作为输入并产生具有某个真空压力657的真空,该供应空气的压力(即,供应空气压力651)由比例阀652设置。在某些实施例中,真空发生器650是文丘里真空发生器,其通过供应空气流过泵由该泵产生真空。本领域的普通技术人员了解文丘里真空发生器的内部运作,因此,为了简洁起见,与这种内部运作相关的细节在本文中不再描述。
36.如上所述,比例阀652设置提供给真空发生器650的供应空气的供应空气压力651。比例阀以与输入变化相同的比率提供输出压力或流量的变化。例如,如果输入加倍,则输出也将加倍。在图6中,比例阀625可操作地联接到空气压缩机或空气源储器658。比例阀625将压缩空气作为输入并基于提供给比例阀652的输入电压653调节压力(通过提供更少或更多的空气)。电压653越高,供应空气压力651就越高。真空发生系统600进一步包括pid控制器654,用于控制真空压力657。通常,pid控制器基于误差趋势的误差量(计算为所需设定点与最后传感器读数之间的差异)、积分和微分来提供用于驱动执行器(例如,比例阀652)的计算。
37.为了用一个简单的示例来图示pid控制器654的操作,pid控制器654将对应于当前真空压力与真空压力设定点656之间的差的误差值作为输入。pid控制器654然后计算此误差值相对于时间的微分和积分。基于这样的计算,pid控制器654然后提供输出(例如,电压值的形式)。可以以如本领域普通技术人员所了解的不同方式计算输出。在一个示例中,输出可能等于比例增益(k
p
)乘以误差的大小加上积分增益(ki)乘以误差的积分加上微分增益(kd)乘以误差的微分。
38.真空压力设定点656指的是对应工具103(例如,玻璃体切割器203、超声乳化术探针503等)的用户可能期望的某个真空压力。用户可以通过显示在手术控制台101的显示器109上的图形用户界面、手术控制台101的脚踏板或通过某个其他机构向手术控制台101提供输入来改变真空压力设定点656。当前真空压力是指由真空压力传感器659提供给pid控制器654的真空压力的最后传感器读数。例如,真空压力传感器659可以周期性地或连续地感测当前真空压力。
39.因此,pid控制器654周期性地或连续地计算应该提供给比例阀652(例如,使用驱动电路)以帮助真空发生系统600最终达到真空压力设定点656的电压653的量。如上所述,
电压653越高,供应空气压力651越高,因此真空压力657越高。如此,通过基于pid控制器654计算的误差控制电压653,真空发生系统600能够控制真空压力657。
40.然而,在真空发生系统600中,超过一定量的供应空气压力651时,随着供应空气压力增加651,真空发生器650效率降低并且产生的真空压力657变小。
41.图7图示了现有技术真空发生系统(比如真空发生系统600)的真空发生性能图700。如图700所示,真空压力(以mmhg为单位测量,是指毫米汞柱)随着供应空气压力在0到某个阈值(例如,60psig(磅/平方英寸表压))的范围内增加而增加。然而,随着供应空气压力增加到高于阈值,真空压力开始下降。例如,当供应空气压力达到60psig左右并增加时,真空压力开始下降,从而引起标准pid控制器(例如,pid控制器654)驱动至不稳定。应注意,60psig只是一个示例,不同真空发生器的阈值可能不同。例如,供应空气压力设定点可以大约在40psig至60psig的范围内。
42.因此,如果系统达到递减区域或非单调区域(例如,60-87psig),则使用单个pid控制器(比如以结合真空发生系统600所描述的方式)会导致真空发生系统600变得不稳定。例如,在这样的情况下,pid控制器654感测到真空压力657低于真空压力设定点656,这引起pid控制器654增加电压653。增加后的电压使比例阀652打开得甚至更大,允许更多的供应空气(即,更高的供应空气压力651),这引起真空发生器650将真空压力657降低得甚至更多。真空压力的附加降低657引起pid控制器654再次增加电压653,并且循环重复。在这样的情况下,真空发生系统600被驱动到它的极限并且变得不稳定。为了从这种不稳定性中恢复,必须将真空压力设定点656降低到低于当前真空压力657,这会引起pid控制器654降低电压653,直到真空发生系统600回到单调区域(例如,0-60psig的供应空气压力)。如此,真空发生系统600可以经历真空压力的初始增加然后降低直到达到真空压力设定点656为止。结果,在上述情况下,真空发生系统600在达到期望的真空压力设定点方面可能表现迟缓或缓慢。
43.相应地,本文描述的某些实施例涉及具有第一pid控制器和第二超控pid控制器的真空发生系统,这些控制器分别对应于第一反馈回路和与第一反馈回路并联的第二反馈回路。第一pid控制器被配置为基于当前真空压力与真空压力设定点之间的误差进行计算,而第二超控pid控制器被配置为基于当前供应空气压力与供应空气压力设定点之间的误差进行计算。然后比较由第一反馈回路和第二反馈回路进行的计算以确定用于驱动真空发生系统的较低或最小电压。
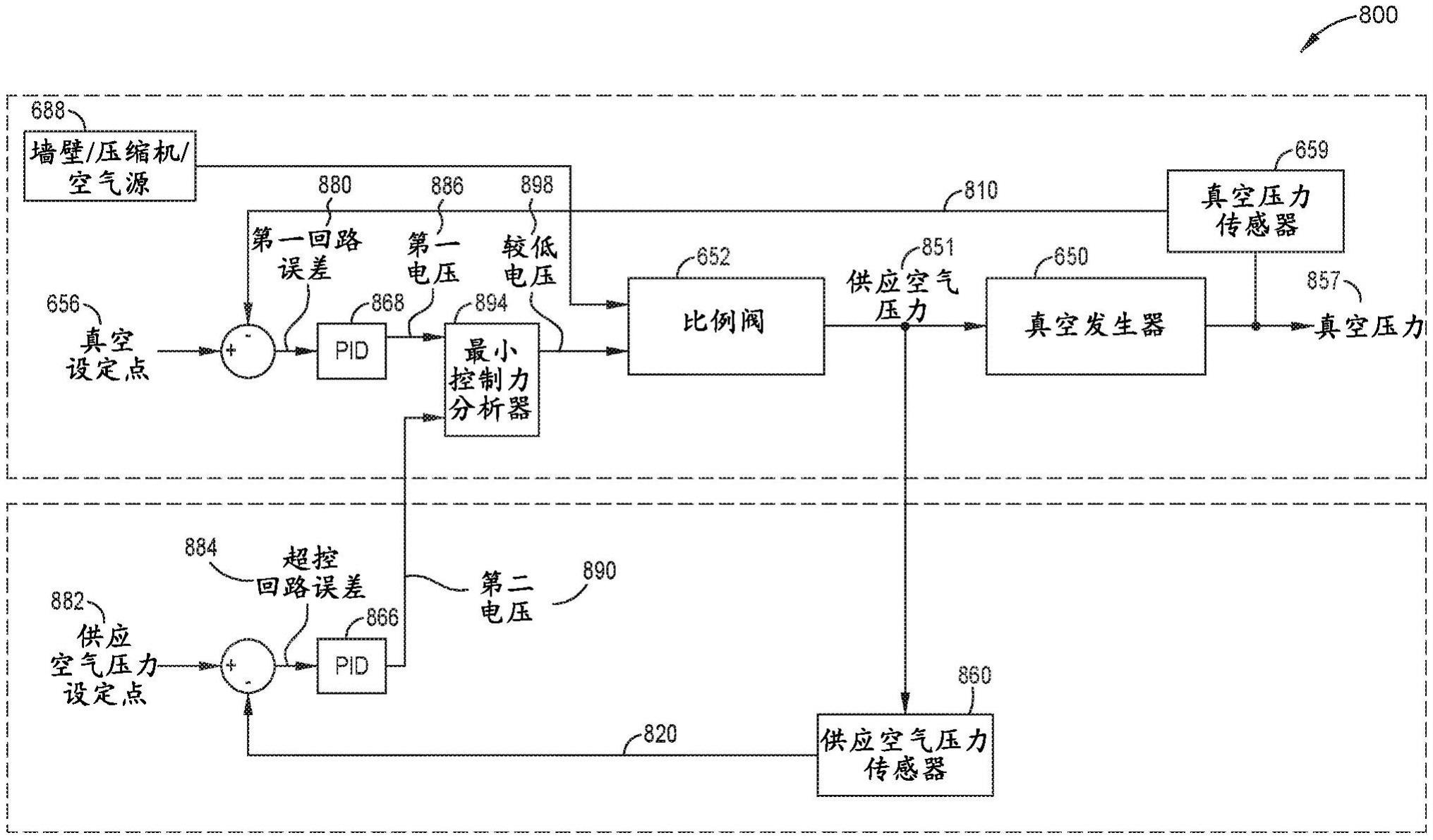
44.图8图示了高级图,图示了根据某些实施例的真空发生系统800的示例性操作。如图所示,真空发生系统800包括具有第一pid控制器868的第一反馈回路810,该控制器被配置为将第一回路真空压力误差(“第一回路误差”)880作为输入,第一回路真空压力误差对应于当前真空压力857(对应于真空压力传感器659提供的最新传感器读数)与真空压力设定点656之间的差。使用第一回路误差880,第一pid控制器868然后被配置为计算第一回路误差880相对于时间的微分和积分。第一pid控制器868进一步使用第一回路误差计算比例项。基于这样的计算,pid控制器868被配置成提供第一电压886作为输出,该第一电压对应于用于最小化当前真空压力857与真空压力设定点656之间的差的控制值。
45.真空发生系统800进一步包括第二反馈回路820,该第二反馈回路具有第二超控pid控制器866,该控制器将超控回路误差884作为输入,其中超控回路误差884对应于(如用
户确定或提供的)供应空气压力设定点882与当前供应空气压力851之间的差。当前供应空气压力851对应于供应空气压力传感器860提供的最新传感器读数。在某些实施例中,供应空气压力设定点882可以设置在0-60psig的范围内(例如,对应于真空发生器650的单调区域)。例如,供应空气压力设定点882可以被设置为最大供应空气压力(例如,60psig,其在使用期间可以是不变的(例如,恒定的)或静态的),该最大供应空气压力对应于真空发生器650的单调区域的最大真空压力。如下文进一步描述的,限制供应空气压力的范围有助于确保真空发生系统800的稳定性。
46.使用超控回路误差884,超控pid控制器866然后被配置为计算超控回路误差884相对于时间的微分和积分。超控pid控制器866进一步使用超控回路误差884计算比例项。基于这样的计算,超控pid控制器866被配置为确定第二电压890作为输出,该第二电压对应于用于最小化当前供应空气压力851与供应空气压力设定点882之间的差的控制值。
47.最小控制力分析器894比较第一pid控制器868计算的第一电压886和超控pid控制器866计算的第二电压890以确定对应于第一电压886和第二电压890中的较低电压水平的最小电压898。然后将最小电压898提供给比例阀652,该比例阀然后基于提供的最小电压898设置供应空气压力851。如前所述,真空发生器650以供应空气作为输入并产生具有某个真空压力857的真空,该供应空气的压力(即,供应空气压力851)由比例阀652设置。在一些实施例中,由回路使用较低电压水平计算的积分值(即,如果第一电压886小于第二电压890则由第一pid控制器868确定的积分值,或如果第二电压890小于第一电压886则由超控pid控制器866确定的积分值)被提供给第一pid控制器868和超控pid控制器866,用作下一次电压计算时的积分值。
48.同时使用第一pid控制器868和超控pid控制器866允许真空发生系统800通过限制提供到真空发生器650中的供应空气压力851的范围来控制真空压力857,从而消除或降低真空发生器650在其递减和非单调范围内操作的可能性。更具体地,涉及第一pid控制器868的第一pid回路使用包括当前真空压力857(例如,主要参数)和期望的真空压力设定点656在内的真空压力反馈来输出第一电压886。另一方面,涉及超控pid控制器866的超控pid回路采用供应空气压力设定点882和包括当前供应空气压力851(例如,次要参数)在内的供应空气压力反馈来输出第二电压890。
49.在操作中,在某些实施例中,当供应空气压力851低于供应空气压力设定点882(例如,60psig)时,第一反馈回路810通常控制真空发生系统800。在这样的示例中,第一pid控制器868产生的第一电压886低于由超控pid控制器866产生的第二电压890并且被提供给比例阀652以控制供应空气压力851。然而,当供应空气压力851接近、等于或超过供应空气压力设定点882时,第二反馈回路820通过向比例阀652提供第二电压890来控制真空发生系统800,该第二电压处于低于第一电压886的那个点。因此,第二反馈回路820用于监测供应空气压力851,并在供应空气压力851接近、等于或超过供应空气压力设定点882时从第一反馈回路810接管系统800的控制,从而防止真空发生系统800进入非单调区域或最小化真空发生系统800在非单调区域中操作的时间量。进一步地,通过利用最小控制力分析器984,在第一反馈回路810和第二反馈回路820的控制之间存在无缝转变。
50.相应地,在某些实施例中,由于瞬态效应,真空发生系统800可能由于供应空气压力851超过供应空气压力设定点882而进入非单调区域。在这样的情况下,第二反馈回路820
变成主动控制器以将真空发生系统800往回向供应空气压力设定点882驱动,从而使真空发生系统800在非单调区域中的存在是暂时的,而不是永恒的。换言之,在非单调区域中,第二电压890可以在短时间内大于第一电压886,但是超控pid控制器866将快速降低第二电压890以使得第二反馈回路820采取控制并且比例阀652将降低供应空气压力851,直到供应空气压力达到供应空气压力设定点882为止。
51.换句话说,如本文中所述,同时使用第一pid控制器868和超控pid控制器866允许真空发生系统800控制次要参数(例如,供应空气压力)的操作范围,基于此,真空发生系统800能够避免进入真空发生器650的递减或非单调区域。防止真空发生系统800发生意外抽吸并进入真空发生器650的递减和非单调区域提高了真空发生系统800的性能响应性(例如,性能速度),因为系统不需要从不稳定性中恢复。
52.进一步应注意,本文中所述的超控pid控制器设计可以在各种其他系统中实现,这些系统类似于真空发生系统800,以主要参数(例如,真空压力)和次要参数(例如,供应空气压力)工作,使得主要参数是基于次要参数计算的。通过在这样的系统中实现本文中所述的超控pid控制器设计,可以基于对应于第一输出(例如,第一电压886)和第二输出(例如,第二电压890)中的较小输出的最小输出(例如,电压值)来控制次要参数,其中,基于当前主要参数(例如,真空压力857)和主要参数设定点(例如,真空压力设定点656)计算第一输出,并且基于当前次要参数(例如,供应空气压力851)和次要参数设定点(例如,供应空气压力设定点882)计算第二输出(例如,第二电压890)。
53.换言之,以比如以上的主要和次要参数操作的任何系统都可以受益于本文中描述的超控pid控制器设计。
54.还应注意,这里为输入、输出或设置点设置的范围是示例性的。换句话说,这些范围可以基于制造和/或用户偏好以及系统部件的类型和特点进行调整。例如,真空发生系统可以使用直到供应空气压力达到90psig才进入非单调工作范围的真空发生器。在这种情况下,供应空气压力设定点的范围可以定义为0-90psig。在另一个示例中,当供应空气压力达到40psig时,不同类型的真空发生器可能会进入其非单调操作范围。在这种情况下,供应空气压力设定点的范围可以定义为0-40psig。输入、输出或设定点的其他范围可以根据上述因素以及如本领域普通技术人员所了解的其他因素类似地改变。
55.还应注意,尽管上面描述了两个反馈回路,但是可以组合使用多于两个的反馈回路。例如,真空发生系统800可以进一步包括具有第二超控pid控制器的第三反馈回路,该控制器被配置为将对应于当前供应空气压力与(用户确定或提供的)第二供应空气压力设定点之间的差的第三回路误差作为输入。在某些实施例中,第二供应空气压力设定点可以设置为对应于真空发生器650的单调区域的最小真空压力的最小供应空气压力(例如,其在使用期间可以不变)。使用第三回路误差,第二超控pid控制器可以被配置为确定第三电压作为输出,然后最大控制力分析器可以将第三电压在最小控制力分析器894之前与第一电压886比较或在最小控制力分析器894之后与最小电压898进行比较。在比较时,最大控制力分析器然后可以提供间隔电压水平中的较高者(例如,最大值)作为输出。相应地,真空发生系统800的最小操作范围可以利用相同的系统结构但包括附加的反馈回路来建立。在一些实施例中,使用第二超控回路可以不需要使用最小输出。例如,可以在真空压力与第一超控回路之间使用最小比较器,并且可以在最小比较器的结果与第二超控回路的输出之间使用最
大比较器。在一些实施例中,可以使用相同的传感器。例如,当使用供应压力时,可以使用第二超控回路来防止供应空气压力过低或过高。
56.如本领域的普通技术人员所了解的,真空发生系统800可以有多种实现方式。例如,在某些实施例中,系统的所有部件都可以被配置为进行数字通信。在这样的实施例中,可以不需要使用数模转换器(dac)或模数转换器(adc)。在某些其他实施例中,系统的所有部件都可以是模拟的。类似地,在这样的实施例中,可能不需要使用数模转换器(dac)或模数转换器(adc)。在某些其他实施例中,系统的一些部件可以是模拟的并且一些其他部件可以是数字的。例如,在某些其他实施例中,第一pid控制器868、超控pid控制器866和最小控制力分析器894可以对应于可以从存储器取得然后由处理器执行的软件指令。在这样的实施例中,因为处理器提供的任何输出都是数字的,所以可以使用数模转换器(dac)来允许处理器与系统的一些模拟部件(例如,驱动电路、比例阀652等)通信。类似地,adc可以被某些部件使用,比如被供应空气压力传感器860和真空压力传感器659使用以与处理器通信。
57.图9图示了真空发生系统900,该真空发生系统对应于真空发生系统800的示例性实施方式。真空发生系统900包括处理器和存储器(统称为“处理器和存储器980”)以执行第一回路误差880和超控回路误差884的计算以及第一pid控制器868和超控pid控制器866的pid计算。处理器和存储器980还可以计算对应于第一电压886和第二电压890中的较小电压的最小电压898。处理器被配置为取得并执行存储在存储器中的编程指令。处理器可以包括单个cpu(中央处理器)、多个cpu、具有多个处理核的单个cpu等。存储器可以是一种或多种容易获得的存储器,比如随机存取存储器(ram)、只读存储器(rom)、软盘、硬盘、固态、闪存、磁存储器、或任何其他形式的本地或远程数字存储装置。在某些实施例中,存储器包括指令,这些指令在由处理器执行时进行第一回路误差880和超控回路误差884的计算、第一pid控制器868和超控pid控制器866的pid计算以及最低电压898的计算。在某些实施例中,处理器和存储器980可以是手术控制台101的主处理器和存储器,手术控制台可以实现或包括真空发生系统900。
58.如上所述,一个或多个dac和adc可用于处理器与系统中的其他部件之间的通信。例如,处理器可以将计算出的最小电压值指示给接口862,该接口可以包括dac以及驱动电路。当驱动电路从dac接收到指示计算出的最小电压值的模拟信号时,驱动电路将对应量的电压提供给比例阀652。dac和驱动电路的使用仅仅是示例性的。如本领域普通技术人员所了解的,可以替代地使用其他类型的接口。进一步地,在某些实施例中,供应空气压力传感器860和真空压力传感器659是模拟部件。如此,供应空气压力传感器860可以使用可以是adc的接口870来与处理器通信。类似地,真空压力传感器659可以使用可以是adc的接口864来与处理器通信。
59.图10图示了根据一些实施例的真空发生系统的示例性操作1000。在某些实施例中,操作1000由图8的真空发生系统800执行。本文中参考图8及其部件描述了操作1000。
60.在1002,真空发生系统(例如,真空发生系统800)接收真空压力传感器(例如,真空压力传感器659)的真空压力传感器读数。
61.在1004,真空发生系统计算真空压力传感器读数(例如,真空压力传感器659)与真空压力设定点(例如,真空压力设定点656)之间的第一回路误差(例如,第一回路误差880)。
62.在1006,真空发生系统基于第一回路误差计算(例如,使用第一pid控制器868)用
于控制比例阀(例如,比例阀652)的第一电压水平。
63.在1008,真空发生系统接收供应空气压力传感器(例如,供应空气压力传感器860)的供应空气压力传感器读数。
64.在1010,真空发生系统计算供应空气压力传感器读数与供应空气压力设定点882之间的超控回路误差(例如,超控误差884)。
65.在1012,真空发生系统计算(例如,使用第二pid控制器(例如,超控pid控制器866))用于控制比例阀(例如,比例阀652)的第二电压水平或值,第二电压值基于超控回路误差。
66.在1014,真空发生系统确定对应于第一电压水平和第二电压水平中的较低电压水平的最小电压水平。最小电压水平与比例阀的输入相关联。
67.在1016,真空发生系统向比例阀提供最小电压水平。
68.在1018,真空发生系统使用比例阀基于最小电压水平向真空发生器(例如,真空发生器650)提供供应空气压力。
69.在1020,真空发生系统使用真空发生器向手术工具(例如,图1的工具103)提供基于供应空气压力的真空压力。在一些实施例中,由回路使用较低电压水平计算的积分值(即,如果第一电压886小于第二电压890则由第一pid控制器868确定的积分值,或如果第二电压890小于第一电压886则由超控pid控制器866确定的积分值)提供给第一pid控制器868和超控pid控制器866,用作下一次电压计算时的积分值。
70.提供前面的描述是为了使本领域的任何技术人员能够实践本文所描述的各种实施例。对这些实施例的各种修改对于本领域技术人员来说是显而易见的,并且本文所定义的一般原理可以应用于其他实施例。因此,权利要求不旨在限于本文所示的实施例,而是被赋予与权利要求的语言一致的全部范围。
71.示例实施例
72.实施例1:一种控制真空发生系统中的真空压力的方法,该方法包括:接收第一参数传感器的第一参数传感器读数;计算第一参数传感器读数与第一参数设定点之间的第一误差;基于计算出的第一误差确定第一电压值;接收次要参数传感器的次要参数传感器读数;计算次要参数传感器读数与次要参数设定点之间的第二误差;基于计算出的第二误差确定第二电压值;确定第一电压值与第二电压值中的较小值;向执行器提供具有较小值的输入;使用执行器,基于输入向装置提供次要参数。
73.实施例2:一种控制真空发生系统中的真空压力的方法,该方法包括:接收第一参数传感器的第一参数传感器读数;计算第一参数传感器读数与第一参数设定点之间的第一误差;基于第一误差使用第一比例-积分-微分(pid)控制器计算与执行器的第一输入相关联的第一值;接收次要参数传感器的次要参数传感器读数;计算次要参数传感器读数与次要参数设定点之间的第二误差;基于第二误差使用第二pid控制器计算与执行器的第二输入相关联的第二值;确定第一值和第二值中的较小值;向执行器提供具有较小值的第一输入或第二输入;基于所提供的输入,使用执行器向装置提供次要参数;使用该装置,将基于次要参数的第一参数提供给工具。
74.实施例3:如上述实施例2所述的方法,进一步包括:接收第三参数传感器的第三参数传感器读数;计算第三参数传感器读数与第三参数设定点之间的第三误差;基于第三误
差使用第三pid控制器计算与执行器的第三输入相关联的第三值;确定第一值、第二值和第三值中的最低值;以及将具有最低值的第一输入、第二输入或第三输入提供给执行器。
75.实施例4:如上述实施例3所述的方法,其中,第三参数是通过限制提供给比例阀的电压来防止比例阀过热的温度限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。