技术特征:
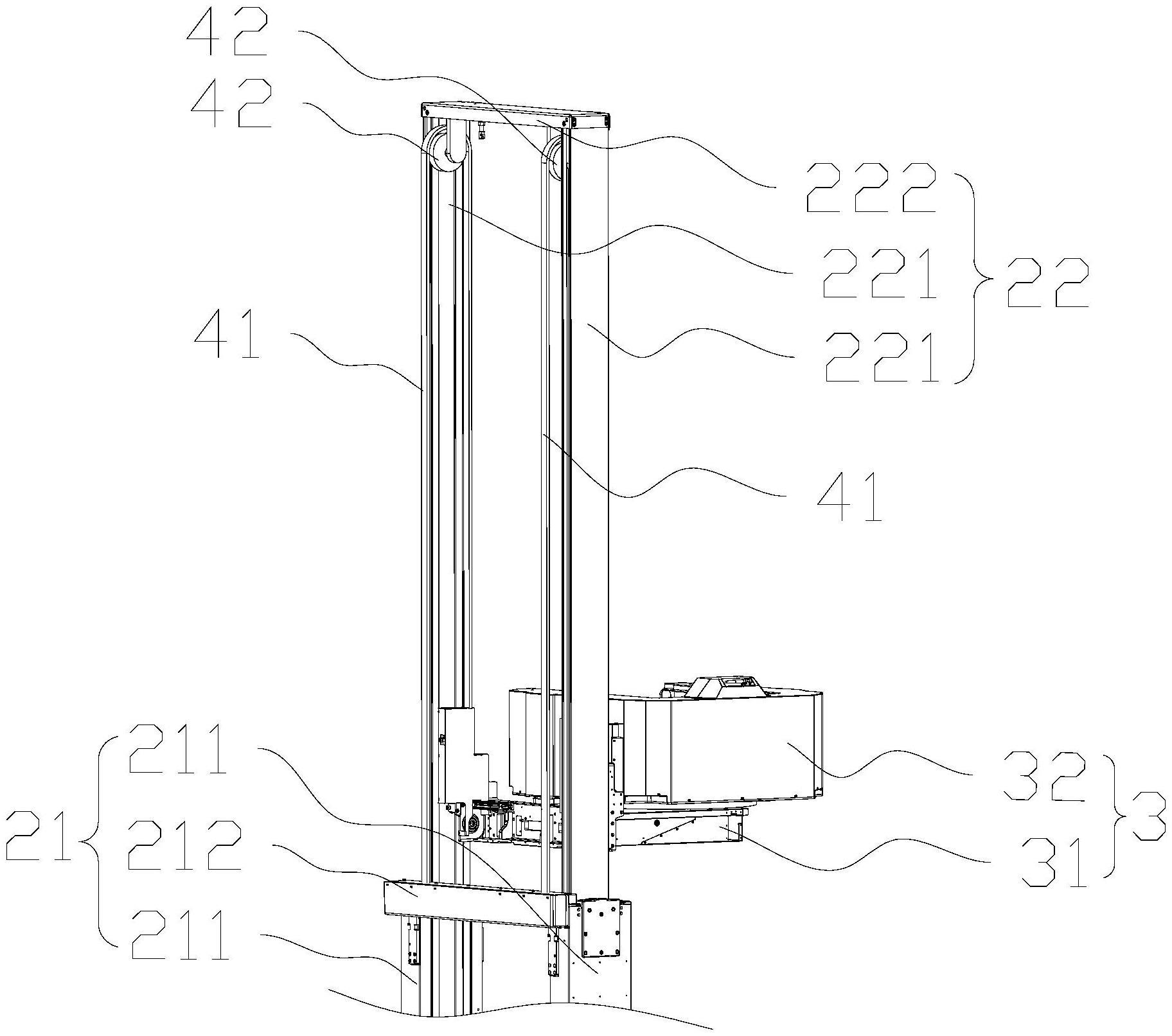
1.一种搬运机器人,其特征在于,包括:底盘组件(1);门架组件,所述门架组件包括固定门架(21)和活动门架(22),所述固定门架(21)设置在所述底盘组件(1)上,所述活动门架(22)活动设置在所述固定门架(21)上;取放组件(3),所述取放组件(3)通过传动机构设置在所述活动门架(22)上;驱动装置(51),所述驱动装置(51)被构造为带动所述活动门架(22)沿所述固定门架(21)在高度方向上运动,所述活动门架(22)在运动的过程中通过所述传动机构带动所述取放组件(3)相对于所述活动门架(22)在高度方向上同步运动。2.根据权利要求1所述的搬运机器人,其特征在于,所述传动机构被构造为当所述活动门架(22)沿所述固定门架(21)上升时,带动所述取放组件(3)沿所述活动门架(22)上升;所述传动机构被构造为当所述活动门架(22)沿所述固定门架(21)下降时,带动所述取放组件(3)沿所述活动门架(22)下降。3.根据权利要求2所述的搬运机器人,其特征在于,所述取放组件(3)相对所述固定门架(21)上升或下降的高度为所述活动门架(22)相对所述固定门架(21)上升或下降的高度的二倍。4.根据权利要求3所述的搬运机器人,其特征在于,所述传动机构包括:滑轮组,所述滑轮组连接在所述活动门架(22)的顶部;挠性传动部(41),所述挠性传动部(41)的一端固定连接在所述取放组件(3)上,另一端绕过所述滑轮组后固定连接在所述固定门架(21)。5.根据权利要求4所述的搬运机器人,其特征在于,所述取放组件(3)被构造为与所述活动门架(22)导向配合,所述取放组件(3)被构造为在自身重力的作用下悬挂在所述挠性传动部(41)上。6.根据权利要求4所述的搬运机器人,其特征在于,所述滑轮组至少包括一个转动连接在所述活动门架(22)顶部的定滑轮(42),所述挠性传动部(41)的一端固定连接在所述取放组件(3)上,另一端绕过所述定滑轮(42)后固定连接在所述固定门架(21);所述活动门架(22)相对于固定门架(21)的运动高度,为所述取放组件(3)相对于活动门架(22)运动高度的一半。7.根据权利要求6所述的搬运机器人,其特征在于,所述滑轮组还包括与所述定滑轮(42)配合的动滑轮,所述挠性传动部(41)的一端固定连接在所述取放组件(3)上,另一端绕过所述定滑轮(42)、动滑轮后固定连接在所述固定门架(21)。8.根据权利要求1所述的搬运机器人,其特征在于,所述活动门架(22)至少包括第一活动门架(23)、第二活动门架(24);所述第二活动门架(24)被构造为通过第一传动机构连接在所述第一活动门架(23)上;所述取放组件(3)被构造为通过第二传动机构连接在所述第二活动门架(24)上;所述第一活动门架(23)沿所述固定门架(21)在高度方向上运动的过程中,通过第一传动机构带动第二活动门架(24)相对于所述第一活动门架(23)在高度方向上同步运动,以及第二活动门架(24)在运动的过程中通过所述第二传动机构带动所述取放组件(3)相对于所述第二活动门架(24)在高度方向上同步运动。9.根据权利要求8所述的搬运机器人,其特征在于,所述第一传动机构包括:
第一滑轮组,所述第一滑轮组转动连接在所述第一活动门架(23)的顶部;第一挠性传动部(43),所述第一挠性传动部(43)的一端固定连接在所述第二活动门架(24)上,另一端绕过所述第一滑轮组后固定连接在所述固定门架(21)。10.根据权利要求9所述的搬运机器人,其特征在于,所述第二传动机构包括:第二滑轮组,所述第二滑轮组转动连接在所述第二活动门架(24)的顶部;第二挠性传动部(44),所述第二挠性传动部(44)的一端固定连接在所述取放组件(3)上,另一端绕过所述第二滑轮组后固定连接在所述第一活动门架(23)上。11.根据权利要求1所述的搬运机器人,其特征在于,所述活动门架(22)被构造为通过运动组件设置在所述固定门架(21)上;所述驱动装置(51)的输出端与设置在所述固定门架(21)与活动门架(22)之间的运动组件传动连接,所述运动组件被构造为受控于驱动装置(51)带动所述活动门架(22)沿着所述固定门架(21)在高度方向上运动。12.根据权利要求11所述的搬运机器人,其特征在于,所述运动组件为链传动、齿轮传动、滚轴丝杠传动中的其中一种。
技术总结
本公开涉及一种搬运机器人,该搬运机器人包括底盘组件、门架组件、取放组件和驱动装置。门架组件包括固定门架和活动门架,固定门架设置在底盘组件上,活动门架活动设置在固定门架上;取放组件通过传动机构设置在活动门架上;驱动装置被构造为带动活动门架沿固定门架在高度方向上运动,所述活动门架在运动的过程中通过带动取放组件相对于活动门架在高度方向上同步运动。本公开通过驱动装置带动活动门架运动,活动门架就可以通过传动机构带动取放组件相对活动门架做同步运动,也即是设置单一动力源就可以实现取放组件上升或下降至对应的高度对容器进行存放,相比于现有技术中的多个动力源驱动门架、取放组件升降,本公开的结构更加简单,也能够节约成本。也能够节约成本。也能够节约成本。
技术研发人员:李晓伟 肖玉辉
受保护的技术使用者:北京极智嘉科技股份有限公司
技术研发日:2022.12.30
技术公布日:2023/7/5
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。