1.本发明涉及球壳结构的健康监测领域,尤其涉及一种基于逆元法与虚实结合技术的结构形态反演精度提升方法。
背景技术:
2.耐压球壳结构作为一种高端深海装备,长时间在恶劣深海环境中服役,主要部分是耐压球壳。耐压球壳结构在工作中遭受到风载荷、波浪载荷、船体碰撞以及爆炸冲击等载荷交互作用,球壳结构容易产生变形或损伤,从而威胁到人员安全并造成巨大经济损失。因此,全面、准确获取深潜器结构关键部位的动/静态位移、应变响应与分布特征,能够为确保深潜器正常工作、舱内人员安全、提升深潜器全寿命周期抵抗各种风险能力以及后续发展面向深潜器结构数字孪生提供关键技术支持。
3.目前用于结构变形的重构分析方案,主要包括:模态叠加分析、ko位移理论分析、曲率递推分析以及逆向有限元分析等。前三种方法存在计算复杂、不适合实际工程应用等问题。而逆向有限元分析则需要借助足够多的传感器,当传感器布置较少时,反演精度较低。这就又导致了实际的工程应用中所需传感器数量较多、成本较高的问题。
技术实现要素:
4.本发明的实施例提供一种基于逆元法与虚实结合技术的结构形态反演精度提升方法,以球壳结构为例,该方法能够降低球壳形态结构的应变场分析过程中,进行反演时所需的传感器数量。
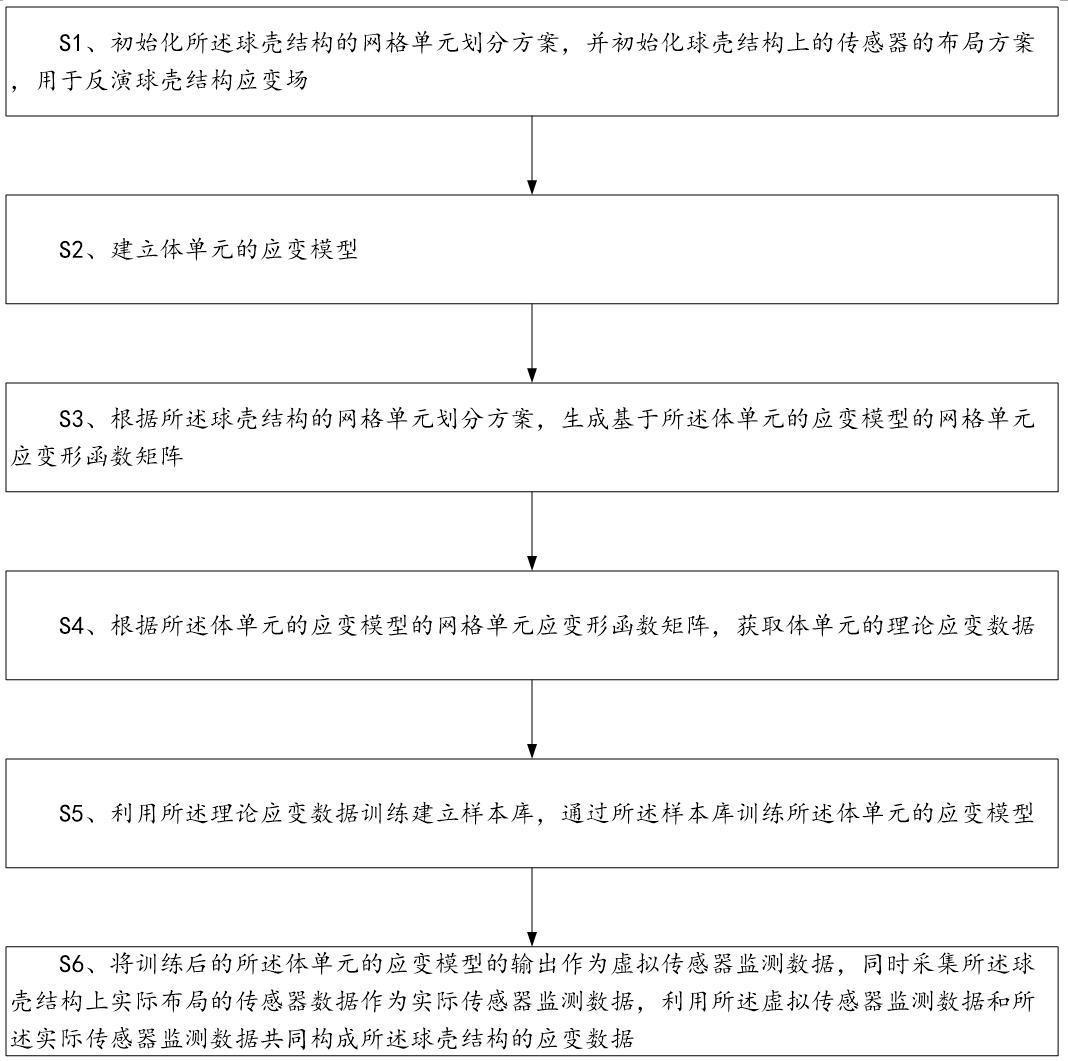
5.为达到上述目的,本发明的实施例采用如下技术方案: s1、初始化所述球壳结构的网格单元划分方案,并初始化球壳结构上的传感器的布局方案; s2、建立体单元的应变模型,其中,所述体单元的应变模型用于计算网格单元内部的任意一点的应变情况; s3、根据所述球壳结构的网格单元划分方案,生成基于所述体单元的应变模型的网格单元应变形函数矩阵; s4、根据所述体单元的应变模型的网格单元应变形函数矩阵,获取体单元的理论应变数据; s5、利用所述理论应变数据训练建立样本库,通过所述样本库训练所述体单元的应变模型,其中,所述样本库中还包括实际应变数据,训练过程中采用mse神经网络损失函数; s6、将训练后的所述体单元的应变模型的输出作为虚拟传感器监测数据,同时采集所述球壳结构上实际布局的传感器数据作为实际传感器监测数据,利用所述虚拟传感器监测数据和所述实际传感器监测数据共同构成所述球壳结构的应变数据。
6.本发明实施例提供的用于提升球壳形态反演精度的方法,首先确定球壳结构初步
单元网格划分与传感器布局方案,用于反演球壳结构应变场,同时根据八节点体单元位移插值函数原理,推导八节点体单元对应的体单元应变函数;其次,构建规则网格单元与非规则网格单元之间转换矩阵,并根据单元网格划分方案,构造基于体单元应变函数的八节点网格单元应变形函数矩阵,并推导表面理论线应变与理论剪切应变;最后,根据mse神经网络损失函数原理,建立理论与实际应变误差函数,反演结构应变场,并结合虚实结合思想,更新结构单元网格划分方案。从而降低球壳形态结构的应变场分析过程中,进行反演时所需的传感器数量。
附图说明
7.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
8.图1为本发明实施例提供的球壳结构传感器布局方案的示意图;图2为本发明实施例提供的球壳结构应变场反演效果验证示意图;图3为本发明实施例提供的两种工况下球壳结构位移场反演效果验证示意图;图4为本发明实施例提供的基于逆元法与虚实结合思想的球壳形态反演精度提升流程图示意图;图5为本发明实施例提供的方法流程示意图。
实施方式
9.为使本领域技术人员更好地理解本发明的技术方案,下面结合附图和具体实施方式对本发明作进一步详细描述。下文中将详细描述本发明的实施方式,所述实施方式的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本发明,而不能解释为对本发明的限制。本技术领域技术人员可以理解,除非特意声明,这里使用的单数形式“一”、“一个”、“所述”和“该”也可包括复数形式。应该进一步理解的是,本发明的说明书中使用的措辞“包括”是指存在所述特征、整数、步骤、操作、元件和/或组件,但是并不排除存在或添加一个或多个其他特征、整数、步骤、操作、元件、组件和/或它们的组。应该理解,当我们称元件被“连接”或“耦接”到另一元件时,它可以直接连接或耦接到其他元件,或者也可以存在中间元件。此外,这里使用的“连接”或“耦接”可以包括无线连接或耦接。这里使用的措辞“和/或”包括一个或更多个相关联的列出项的任一单元和全部组合。本技术领域技术人员可以理解,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
10.目前的逆向有限元分析的缺点则包含两点:首先,传统逆有限元原理形函数矩阵无法描述单元内部应变分布信息,从而导致无法反演结构应变场;其次,该方法为保证较高的位移场反演精度,所需传感器数量较多,当传感器布置较少时,反演精度较低。为此,本实
施例的设计思路,主要在于根据八节点体单元应变函数,采用较少的传感器反演球壳结构全域应变,并结合虚实结合思想与逆有限元原理,提升球壳结构位移场反演精度。以便于进一步解决常规八节点逆有限元原理无法反演球壳结构应变场与对结构位移场反演时所需传感器数量较多的问题。
11.本发明实施例提供一种提升球壳形态反演精度的方法,如图5所示,包括: s1、初始化所述球壳结构的网格单元划分方案,并初始化球壳结构上的传感器的布局方案,用于反演球壳结构应变场; s2、建立体单元的应变模型,其中,所述体单元的应变模型用于计算网格单元内部的任意一点的应变情况; s3、根据所述球壳结构的网格单元划分方案,生成基于所述体单元的应变模型的网格单元应变形函数矩阵; s4、根据所述体单元的应变模型的网格单元应变形函数矩阵,获取体单元的理论应变数据; s5、利用所述理论应变数据训练建立样本库,通过所述样本库训练所述体单元的应变模型,其中,所述样本库中还包括实际应变数据,训练过程中采用mse神经网络损失函数; s6、将训练后的所述体单元的应变模型的输出作为虚拟传感器监测数据,同时采集所述球壳结构上实际布局的传感器数据作为实际传感器监测数据,利用所述虚拟传感器监测数据和所述实际传感器监测数据共同构成所述球壳结构的应变数据。
12.本实施例中,首先确定球壳结构初步单元网格划分与传感器布局方案,用于反演球壳结构应变场,同时根据八节点体单元位移插值函数原理,推导八节点体单元对应的体单元应变函数;其次,构建规则网格单元与非规则网格单元之间转换矩阵,并根据单元网格划分方案,构造基于体单元应变函数的八节点网格单元应变形函数矩阵,并推导表面理论线应变与理论剪切应变;最后,根据mse神经网络损失函数原理,建立理论与实际应变误差函数,反演结构应变场,并结合虚实结合思想,更新结构单元网格划分方案,从而降低球壳形态结构的应变场分析过程中,进行反演时所需的传感器数量。从另一方面来说,在部署了相同传感器数量的情况下,由于本实施例实现了虚实结合下的更新结构单元网格划分方案,可以提高球壳结构位移场反演精度。
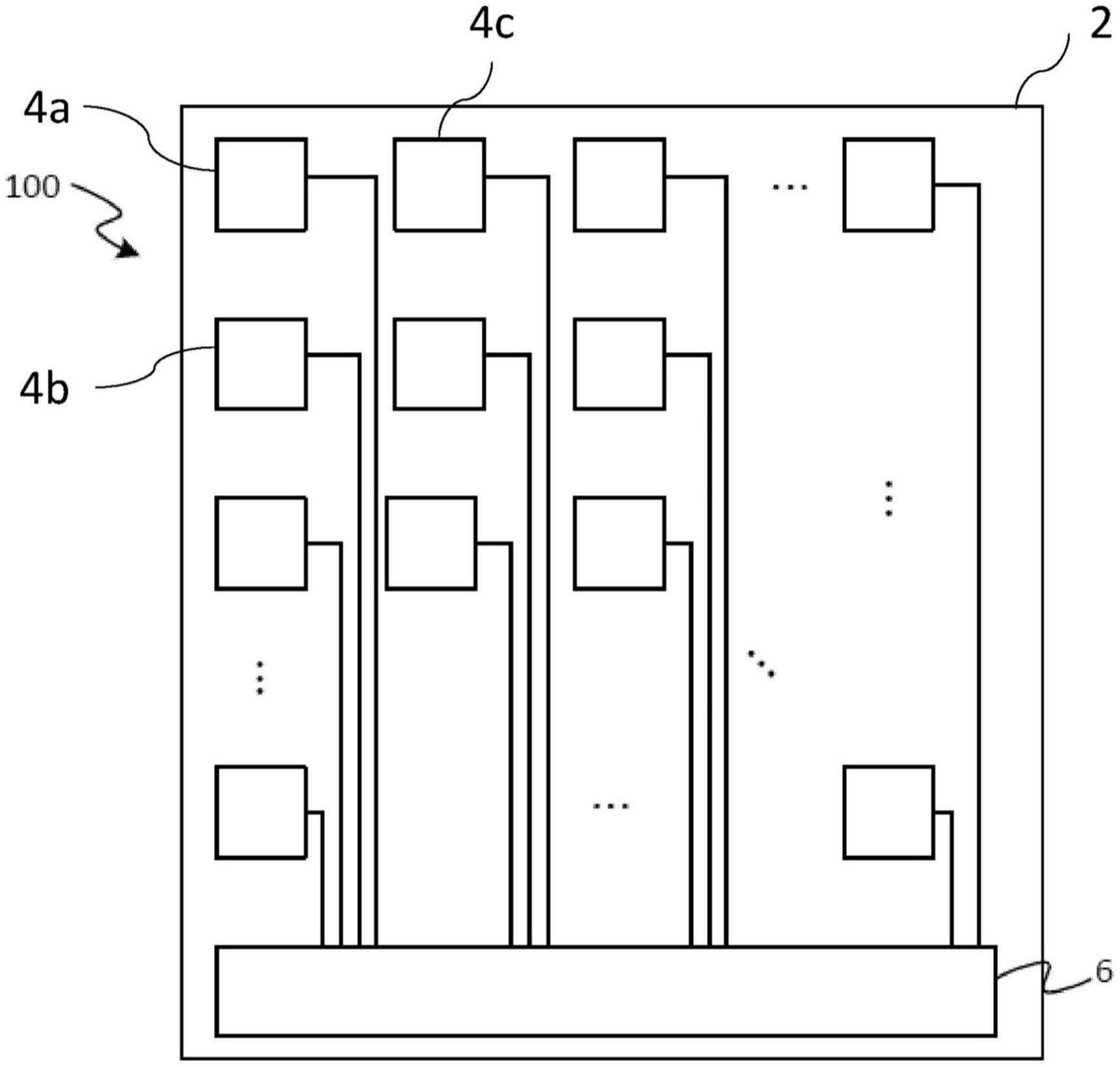
13.本实施例中,在s1中,所述初始化所述球壳结构的网格单元划分方案,包括:采用八节点体单元对球壳结构进行离散,沿着结构经度与纬度方向离散为n个八节点体单元,将基于八节点体单元的网格单元划分方案作为所述球壳结构的初始网格单元划分方案。例如图1、2所示的,本实施例中制定球壳结构初始单元网格划分方案。选用八节点体单元对球壳结构进行离散,沿着结构经度与纬度方向离散为n个八节点体单元,根据球壳结构仿真计算结果,应变梯度较大区域单元划分更密,其余区域均匀划分。该初步单元网格划分方案可用于球壳应变场反演。
14.并且,在s1中,所述初始化球壳结构上的传感器的布局方案,包括:在所述球壳结构的初始网格单元划分方案中,在每个八节点体单元的上表面和下表面,分别布置n组光纤光栅传感器,其中,将所述球壳结构的结构表面上形成的由n
×
2n组传感器构成的分布式传感测量网络,作为球壳结构上的传感器的初始布局方案。
15.在优选方案中,所述球壳结构上的传感器,具体采用fbg光纤传感器;在所述球壳结构的结构表面上的由n
×
2n组传感器中,每一组设置三个fbg光纤传感器,这三个fbg光纤传感器分别按照0
°
方向、90
°
方向和其它角度方向粘贴在所述结构表面上。例如:图1、2所示的,制定结构光纤光栅应变传感器布局方案,在每个八节点体单元上、下表面分别布置n组光纤光栅传感器,结构表面n
×
2n组光纤光栅传感器构成准分布式光纤传感测量网络,监测区域为整个球壳结构表面;光纤光栅传感器测点位置根据实际情况选择,每组设置三个传感器,编号为fbg1、fbg2和fbg3,分别按照0
°
、90
°
和任意其他角度方向粘贴在球壳结构表面,测得球壳结构在该点位置的x方向、y方向以及与其他任意方向应变。在优选方案中,所述传感器按照应变花形式设置在结构上下表面同一位置处。
16.本实施例中,在s2中,所述建立体单元的应变模型,包括:根据经典有限元理论分析,单元内任意一点的位移可由该单元内8个节点的位移线性叠加表示,网格单元内部任意一点的位移表达式如公式(1)所示。式(1)中,u表示单元内一点沿x方向的位移,v表示单元内一点沿y方向的位移,w表示单元内一点沿z方向的位移,ui、vi、wi分别表示每个单元内各个节点的位移分量。
17.同时由于节点位移与节点应变之间是导数关系,因此可以得出单元内任意一点的表面应变与该单元内8个单元节点表面应变之间的函数关系,可将其定义为单元应变函数。具体利用八节点体单元的位移插值函数,建立八节点体单元对应的应变模型,其中,所述八节点体单元对应的应变模型用于表示网格单元内部任意一点的应变,具体包括公式(2)所示的模型。其中,式(2)中ε
x
表示x方向的应变,εy表示y方向的应变,εz表示z方向的应变,γ
xy
表示xy平面内的切应变,γ
xz
表示xz平面内的切应变,γ
yz
表示yz平面内的切应变,u表示单元内一点沿x方向的位移,v表示单元内一点沿y方向的位移,w表示单元内一点沿z方向的位移,ui、vi、wi分别表示每个单元内各个节点的位移分量。
18.进一步的,在s2之后,还包括:建立规则网格单元与非规则网格单元之间转换矩阵,其中,所述八节点体单元具体为一种非规则八节点六面体单元,为所述转换矩阵用于将非规则八节点六面体单元等参转换成规则八节点六面体单元。具体的,构建规则网格单元与非规则网格单元之间转换矩阵。为了使八节点六面体单元能适应不同边界特点的几何形状的网格划分,提出了等参单元思想。将任意非规则八节点六面体单元等参成规则八节点六面体单元,这就需要引入单元局部坐标系ξ、η、ζ。记ξ=x/a,η=y/b,ζ=z/c,则式(3)可以表示为无量纲自然坐标的形式,如公式(3)所示,或者写成通式如公式(4)所示。
19.在所述转换矩阵中,通过整体坐标系x、y、z和局部坐标系ξ、η、ζ之间的几何映射关系,将整体坐标系下的非规则八节点六面体转换成局部坐标系下规则的六面体,通过整体坐标系x、y、z和局部坐标系ξ、η、ζ之间的几何映射,可将整体坐标系下的任意六面体转换成局部坐标系下规则的六面体。两种坐标系下单元内每个点存在一一对应关系,这种对应关系可由公式(5)表示。其中,ξ、η、ζ分别表示局部坐标系的三个方向,且记ξ=x/a,η=y/b,ζ=z/c,a、b、c分别表示非规则八节点六面体单元的最大长度、宽度以及高度尺寸,ni表示非规则八节点六面体单元的等参单元的形函数。
20.八节点六面体等参单元的形函数ni是由ξ、η、ζ表示的,因此不能直接对x、y、z求偏导数,因为ξ、η、ζ很难用x、y、z直接表示出来。根据复合函数求导法则,建立两种坐标偏导数之间的关系,如公式(6)所示。将公式(6)整理成矩阵形式,如公式 (7)所示。其中矩阵j为雅
克比矩阵,其具体表达式如公式(8)所示。xi、yi、zi分别表示x、y、z三个方向的无量纲自然坐标。从而实现两个坐标系间的映射,利用几何规整单元的结果来研究所对应的几何不规整单元的表达式,进而可以快速解决实际复杂问题。
21.本实施例中,在s3中,根据所述球壳结构的网格单元划分方案,生成基于所述体单元的应变模型的八节点网格单元应变形函数矩阵,包括:在所述球壳结构的网格单元划分方案的基础上,将所述球壳结构的结构表面的应变划分为线应变ε和剪切应变γ,根据单元网格划分方案,构造基于体单元应变函数的八节点网格单元应变形函数矩阵。根据线弹性理论,结构表面应变可分为线应变ε和剪切应变γ两部分,如式(9)、(10)所示。其中,ε
xx
表示x方向的表面线应变,ε
yy
表示y方向的表面线应变,ε
zz
表示z方向的表面线应变,在每个网格单元内包含8个节点,每个节点的表面应变向量如公式(11)所示。其中,ε
xi
表示每个节点的x方向的表面线应变,ε
yi
表示每个节点的y方向的表面线应变,ε
zi
表示每个节点的z方向的表面线应变,γ
xyi
表示每个节点的xy平面内的表面切应变,γ
xzi
表示xz平面内的表面切应变,γ
yzi
表示yz平面内的表面切应变,i表示为节点编号。
22.因此,单元内8个节点的应变向量可以表示为公式(12)。根据步骤二得到规则网格单元与非规则网格单元之间转换矩阵,可得到任意形状对应的基于体单元应变函数的八节点体单元应变形函数,八节点体单元应变形函数具体表达式为公式(13)。
23.通过所述转换矩阵,得到所述体单元的应变模型的八节点网格单元应变形函数矩阵,每个八节点单元的应变形函数矩阵n如公式(14)所示。其中m1~m8分别表示八个单元节点各自的形函数矩阵。其中,ni具体表达式为公式(15)。再结合式(2)和式(14),可以求出结构各个单元内任一点应变向量,单元内任意一点的理论应变可表示为公式(16)。
24.本实施例中,所述体单元的理论应变数据包括:体单元的表面理论线应变数据和理论剪切应变数据;在s4中,根据所述体单元的应变模型的八节点网格单元应变形函数矩阵,获取体单元的理论应变数据,包括:根据所述体单元的应变模型的八节点网格单元应变形函数矩阵,获取线应变形函数矩阵cm与剪切应变形函数矩阵cb。其中,将基于体单元应变函数的单元应变形函数矩阵n分为两类,分别为线应变形函数矩阵cm与剪切应变形函数矩阵cb。线应变形函数矩阵与剪切应变形函数矩阵具体表达式为公式(17)。表示每个单元节点的线应变形函数矩阵,表示每个单元节点的剪切应变形函数矩阵,拉压应变形函数矩阵cm与弯曲应变形函数矩阵cb可完整表示为公式(18)。获取表面理论线应变数据ee和理论剪切应变数据ge,具体计算方式如公式(19)所示。其中,表示每个单元节点的应变向量。
25.具体在本实施例中,利用所述理论应变数据训练建立样本库,通过所述样本库训练所述体单元的应变模型,其中,所述样本库中还包括实际应变数据,训练过程中采用mse神经网络损失函数,根据mse神经网络损失函数原理,建立理论与实际应变误差函数,反演结构应变场。根据各测点理论应变,构建理论应变模型与实际应变样本库。再结合mse神经网络损失函数原理,如式(20)所示,对理论应变模型进行训练,使模型预测值最大程度接近实际应变值。式(20)中,e为损失函数值,k为数据的维数,yk为理论应变模型输出值,tk为实际应变样本库。
26.将结构表面通过传感器实验测得的应变值记为e
ε
,包括x方向应变、y方向应变和横向剪切应变γ
xy
,则结构实际应变值与理论应变值的误差函数为公式(21)所示。式(21)中,“ ”表示为上表面的应变,
“‑”
表示为下表面的应变,g
ε
表示结构表面实际横向剪切应变
与z方向应变,由于无法通过实验测得,通常取为0;表示应变测量数据与理论结果之间相关程度的罚参数,该值通常取远小于1的数。e
e
与e
e-表示为结构上下表面线应变,g
e
与g
e-表示为结构上下表面剪切应变,如式(22)所示。
27.误差函数对节点应变向量εe求偏导并使其为0,求解微分方程得到误差函数的极小值,结果如式(23)所示。其中,ke表示结构的应变刚度矩阵,fe表示结构的应变载荷列阵。通过计算,可得到如式(24)所示的应变矩阵方程。在式(24)中,ke、fe可由式(25)计算得到。将式(25)代入式(24),便可求出结构节点应变向量εe,将εe结果代回到式(16)便可求出结构内任一点应变分量。
28.本实施例中,根据虚实结合思想,更新结构单元网格划分方案,提高球壳结构位移场反演精度。如图3和图4所示的,根据虚实结合思想,将得到的球壳结构应变场反演结果作为虚拟应变传感器监测数据,并结合实际光纤传感器监测数据,共同构成单元实际应变,以此减少传感器数量。其次,根据虚实结合的应变信息,细化网格单元划分方案,以此提高单元形函数矩阵的位移场描述精度,并推导八节点体单元理论应变。在获取虚拟传感器监测数据之后,更新所述体单元的应变模型的网格单元应变形函数矩阵,更新后的单元形函数矩阵如式(26)所示。其中,
∆
x、
∆
y和
∆
z分别表示细化更新网格划分后的单元尺寸在x、y、z三个方向上的变化量,xi、yi、zi分别表示x、y、z三个方向的无量纲自然坐标。最后,根据逆有限元原理,构造理论应变与实际应变之间的最小二乘误差函数。将误差函数极值达到最小,得到单元节点位移向量,从而反演球壳结构位移场。
29.本实施例采用体单元应变函数用于构建八节点应变形函数矩阵,并结合mse神经网络损失函数原理,配置较少的传感器反演球壳结构应变场,从而可以制定更精细的单元网格划分方案,最终提升结构位移场反演精度。本发明适用于球壳结构的应变/形态监测和反演等工程应用领域,所具备的优点是:一方面,本发明通过八节点体单元应变函数构建应变形函数矩阵,该应变形函数矩阵可以描述单元内部应变分布,并可结合mse神经网络损失函数原理计算出单元节点应变向量,从而可以反演结构应变场,而常规逆有限元方法无法计算出单元节点应变向量,也无法反演结构应变场。另一方面,根据球壳结构的应变场反演结果与虚实结合思想,在配置较少应变传感器的基础上反演球壳结构位移场,其反演精度不受传感器数量影响。
30.本实施例中所提及的公式模型包括公式(1)至公式(26),分别为:
31.本说明书中的各个实施例均采用递进的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。尤其,对于设备实施例而言,由于其基本相似于方法实施例,所以描述得比较简单,相关之处参见方法实施例的部分说明即可。以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。