技术特征:
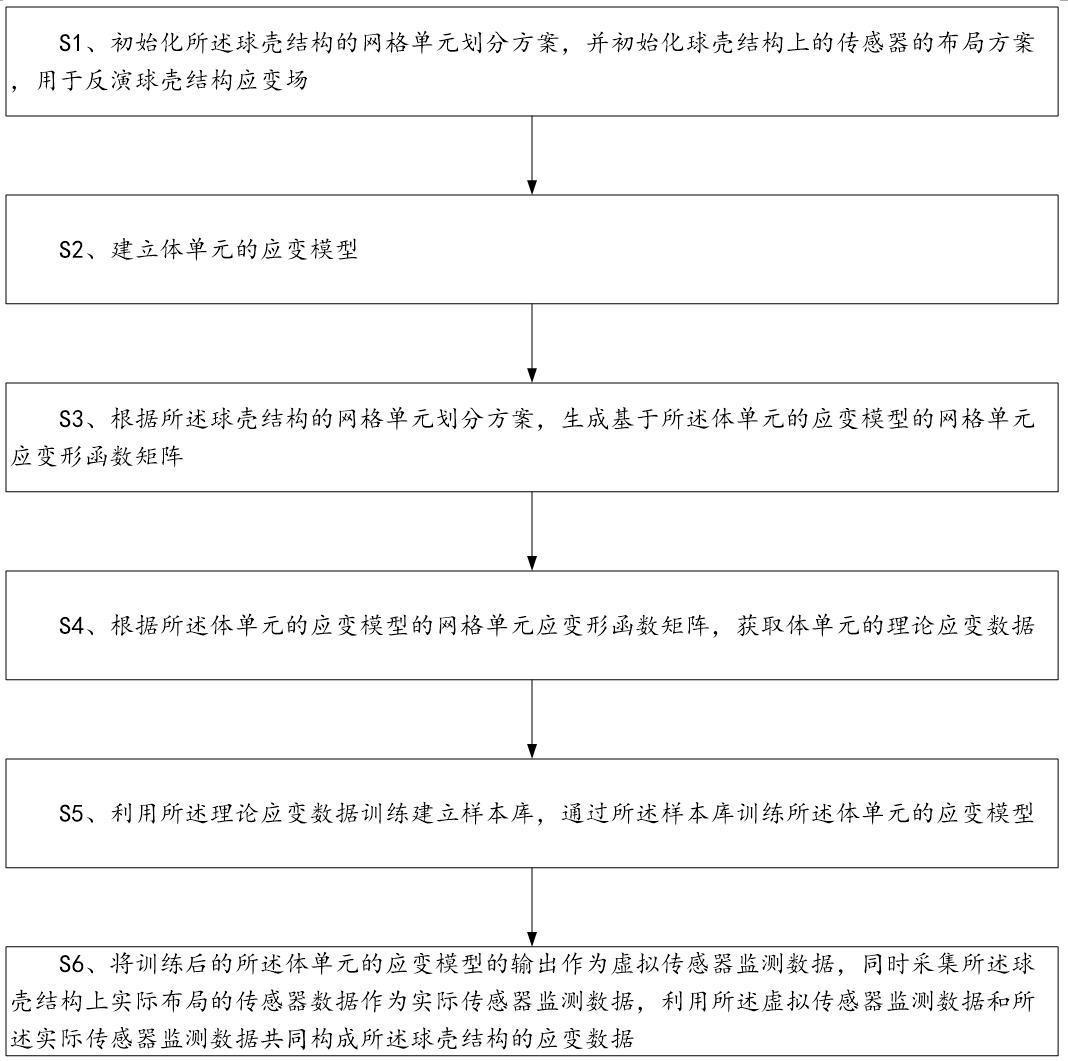
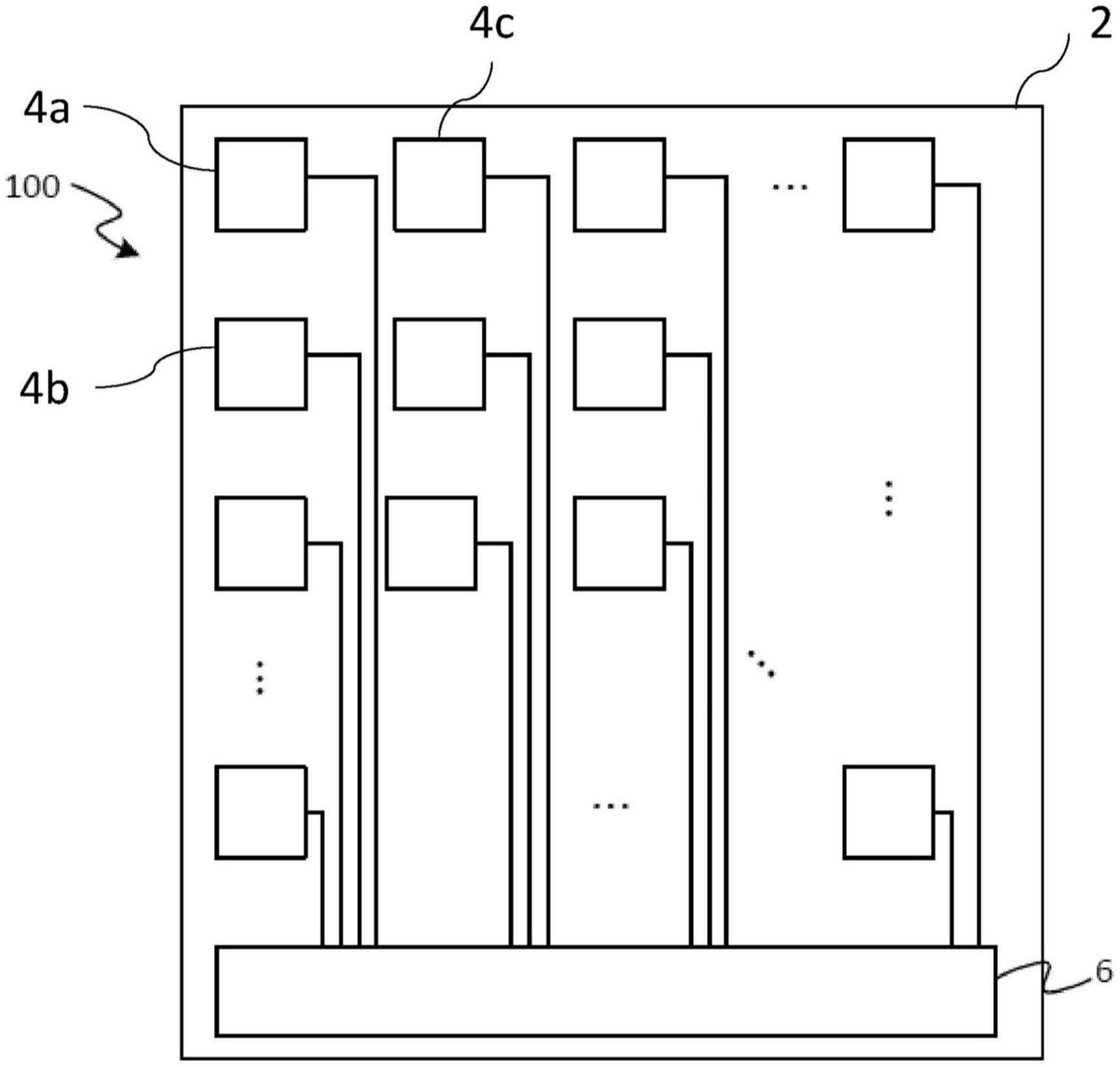
1.一种基于逆元法与虚实结合技术的结构形态反演精度提升方法,其特征在于,包括:s1、初始化球壳结构的网格单元划分方案,并初始化球壳结构上的传感器的布局方案;s2、建立体单元的应变模型,其中,所述体单元的应变模型用于计算网格单元内部的任意一点的应变情况;s3、根据所述球壳结构的网格单元划分方案,生成基于所述体单元的应变模型的网格单元应变形函数矩阵;s4、根据所述体单元的应变模型的网格单元应变形函数矩阵,获取体单元的理论应变数据;s5、利用所述理论应变数据训练建立样本库,通过所述样本库训练所述体单元的应变模型,其中,所述样本库中还包括实际应变数据,训练过程中采用mse神经网络损失函数;s6、将训练后的所述体单元的应变模型的输出作为虚拟传感器监测数据,同时采集所述球壳结构上实际布局的传感器数据作为实际传感器监测数据,利用所述虚拟传感器监测数据和所述实际传感器监测数据共同构成所述球壳结构的应变数据。2.根据权利要求1所述的方法,其特征在于,在s1中,所述初始化所述球壳结构的网格单元划分方案,包括:采用八节点体单元对球壳结构进行离散,沿着结构经度与纬度方向离散为n个八节点体单元,将基于八节点体单元的网格单元划分方案作为所述球壳结构的初始网格单元划分方案。3.根据权利要求2所述的方法,其特征在于,在s1中,所述初始化球壳结构上的传感器的布局方案,包括:在所述球壳结构的初始网格单元划分方案中,在每个八节点体单元的上表面和下表面,分别布置n组光纤光栅传感器,其中,将所述球壳结构的结构表面上形成的由n
×
2n组传感器构成的分布式传感测量网络,作为球壳结构上的传感器的初始布局方案。4.根据权利要求1-3中任意一项所述的方法,其特征在于,所述球壳结构上的传感器,具体采用fbg光纤传感器;在所述球壳结构的结构表面上的由n
×
2n组传感器中,每一组设置三个fbg光纤传感器,这三个fbg光纤传感器分别按照0
°
方向、90
°
方向和其它角度方向粘贴在所述结构表面上。5.根据权利要求2所述的方法,其特征在于,在s2中,所述建立体单元的应变模型,包括:利用八节点体单元的位移插值函数,建立八节点体单元对应的应变模型,其中,所述八节点体单元对应的应变模型包括:
,γ
xy
表示xy平面内的切应变,γ
xz
表示xz平面内的切应变,γ
yz
表示yz平面内的切应变;ε
x
表示x方向的应变,ε
y
表示y方向的应变,ε
z
表示z方向的应变,u表示单元内一点沿x方向的位移,v表示单元内一点沿y方向的位移,w表示单元内一点沿z方向的位移,u
i
、v
i
、w
i
分别表示每个单元内各个节点的位移分量。6.根据权利要求5所述的方法,其特征在于,在s2之后,还包括:建立规则网格单元与非规则网格单元之间转换矩阵,其中,所述八节点体单元具体为一种非规则八节点六面体单元,为所述转换矩阵用于将非规则八节点六面体单元等参转换成规则八节点六面体单元。7.根据权利要求6所述的方法,其特征在于,在所述转换矩阵中,通过整体坐标系x、y、z和局部坐标系ξ、η、ζ之间的几何映射关系,将整体坐标系下的非规则八节点六面体转换成局部坐标系下规则的六面体,所述几何映射关系包括:,其中,ξ、η、ζ分别表示局部坐标系的三个方向,且记ξ=x/a,η=y/b,ζ=z/c,a、b、c分别表示非规则八节点六面体单元的最大长度、宽度以及高度尺寸,n
i
表示非规则八节点六面体单元的等参单元的形函数。8.根据权利要求5或7所述的方法,其特征在于,在s3中,根据所述球壳结构的网格单元划分方案,生成基于所述体单元的应变模型的八节点网格单元应变形函数矩阵,包括:在所述球壳结构的网格单元划分方案的基础上,将所述球壳结构的结构表面的应变划分为线应变ε和剪切应变γ,表示为:,其中,ε
xx
表示x方向的表面线应变,ε
yy
表示y方向的表面线应变,ε
zz
表示z方向的表面线应变,在每个网格单元内包含8个节点,每个节点的表面应变向量为:,其中,ε
xi
表示每个节点的x方向的表面线应变,ε
yi
表示每个节点的y方向的表面线应变,ε
zi
表示每个节点的z方向的表面线应变,γ
xyi
表示每个节点的xy平面内的表面切应变,γ
xzi
表示xz平面内的表面切应变,γ
yzi
表示yz平面内的表面切应变,i表示为节点编号;通过所述转换矩阵,得到所述体单元的应变模型的八节点网格单元应变形函数矩阵=[m1m2m3m4m5m6m7m8],其中m1~m8分别表示八个单元节点各自的形函数矩阵。9.根据权利要求7所述的方法,其特征在于,所述体单元的理论应变数据包括:体单元的表面理论线应变数据和理论剪切应变数据;
在s4中,根据所述体单元的应变模型的八节点网格单元应变形函数矩阵,获取体单元的理论应变数据,包括:根据所述体单元的应变模型的八节点网格单元应变形函数矩阵,获取线应变形函数矩阵c
m
与剪切应变形函数矩阵c
b
,其中:c
im
表示每个单元节点的线应变形函数矩阵,c
ib
表示每个单元节点的剪切应变形函数矩阵,i表示为单元节点编号;获取表面理论线应变数据e
e
和理论剪切应变数据g
e
:,表示每个单元节点的应变向量。10.根据权利要求1所述的方法,其特征在于,还包括:在获取虚拟传感器监测数据之后,更新所述体单元的应变模型的网格单元应变形函数矩阵,其中:,其中,
∆
x、
∆
y和
∆
z分别表示细化更新网格划分后的单元尺寸在x、y、z三个方向上的变化量,x
i
、y
i
、z
i
分别表示x、y、z三个方向的无量纲自然坐标。
技术总结
本发明实施例公开了一种基于逆元法与虚实结合技术的结构形态反演精度提升方法,以球壳结构为例,涉及结构的健康监测领域,能够降低球壳形态结构的应变场分析过程中,进行反演时所需的传感器数量。本发明包括:确定球壳结构初步单元网格划分与传感器布局方案,同时根据八节点体单元位移插值函数原理,推导八节点体单元对应的体单元应变函数模型;根据单元网格划分方案,构造基于体单元应变函数的八节点网格单元应变形函数矩阵,并推导表面理论线应变与理论剪切应变;建立理论与实际应变误差函数,反演结构应变场,并结合虚实结合思想,更新结构单元网格划分方案,从而降低球壳形态结构的应变场分析过程中进行反演时所需的传感器数量。数量。数量。
技术研发人员:朱清峰 吴国庆 曾捷 蒋镇涛 赵博涵 吴华明 陈向飞
受保护的技术使用者:南京航空航天大学
技术研发日:2023.05.05
技术公布日:2023/6/4
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。