技术特征:
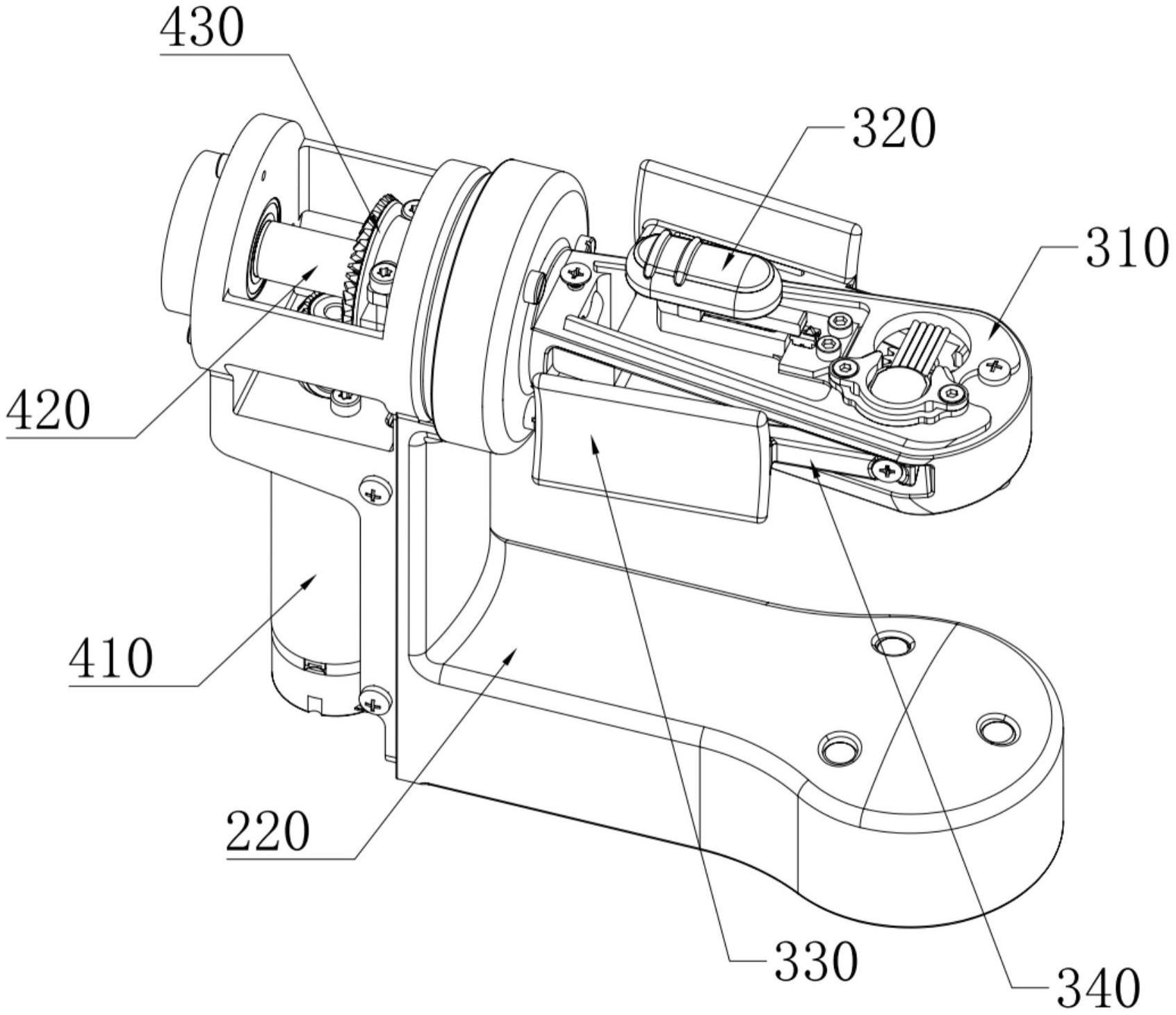
1.一种主手开合组件,其特征在于,包括腕部关节、操作部以及连接所述腕部关节、操作部的连接端部,所述连接端部上转动设有用于连接所述操作部的传动轴;所述连接端部上还设有用于对所述传动轴进行转动助力的旋转助力组件,所述操作部包括指部支架、以及对称且弹性转动设置在所述指部支架上的两个开合操作夹;其中,所述传动轴其中一端延伸至所述连接端部外侧且与所述指部支架固定连接。2.根据权利要求1所述的主手开合组件,其特征在于,所述操作部处设有行程开关、滑动触件,所述滑动触件设于所述行程开关的一侧且能够移动抵触所述行程开关以实现主手助力开合夹与多自由度关节臂的连接断开。3.根据权利要求2所述的主手开合组件,其特征在于,所述滑动触件包括离合拨片以及固定设置在所述离合拨片上的滑架,所述指部支架上设有用于对所述滑架进行滑动导向的限位槽,所述滑架与所述限位槽对应侧内壁之间设有复位弹簧。4.根据权利要求3所述的主手开合组件,其特征在于,所述指部支架其中一侧端面上设有电路板;所述指部支架靠近所述电路板一侧端面上卡接设有覆盖所述电路板的安装架,所述限位槽具体为设置在所述安装架上的滑道。5.根据权利要求3或4所述的主手开合组件,其特征在于,所述指部支架远离电路板一侧端面上固定设有滑座,所述限位槽具体为设置在所述滑座上的滑槽。6.根据权利要求1所述的主手开合组件,其特征在于,所述开合操作夹包括转动设置在所述指部支架上的从动转轴、固定设置在所述从动转轴上的连杆、固定设置在所述连杆上且位于所述指部支架外侧的指板;其中,两个所述从动转轴之间相互齿轮啮合连接,两个所述连杆之间设有弹性件。7.根据权利要求6所述的主手开合组件,其特征在于,所述从动转轴上设有用于感应所述开合操作夹的转动并记录所述开合操作夹转动角度的第一传感器。8.根据权利要求6所述的主手开合组件,其特征在于,所述连杆上固定设有固定筒,所述弹性件具体设置为卡簧,所述卡簧两端分别插设在两个所述连杆上的所述固定筒内。9.根据权利要求1所述的主手开合组件,其特征在于,所述旋转助力组件包括固定设置在所述连接端部上的旋转助力电机、设置在所述旋转助力电机动力轴与所述传动轴之间的锥齿传动组件。10.根据权利要求1或9所述的主手开合组件,其特征在于,所述旋转助力组件包括用于感应所述传动轴周向转动并记录所述传动轴周向转动角度的第二传感器;其中,所述第二传感器能够向旋转助力电机发送信号以控制所述旋转助力电机的开启、关闭。11.根据权利要求1所述的主手开合组件,其特征在于,还包括设置在所述连接端部与所述传动轴之间的旋转限位组件,所述旋转限位组件用于限制所述传动轴于周向上在预定角度内转动。12.一种手术机器人,其特征在于,包括医生控制台,所述医生控制台包括基座、多自由度关节臂,所述关节臂末端连接有权利要求1至11任一项的所述主手助力开合夹。
技术总结
本申请公开了主手开合组件及手术机器人,其中,主手开合组件,包括腕部关节、操作部以及连接二者的连接端部,操作部转动设置在连接端部上且与连接端部之间设有旋转限位组件,本申请实施例中,采用上述的主手开合组件及手术机器人,操作部转动直接带动传动轴转动,传动轴仅转动,避免了多余轴向平移运动导致的结构复杂以及操作阻力大的问题,采用行程开关与滑动触件配合的感应方式,可以不依赖复杂的控制系统,实现信号“0”到“1”的突变,可靠性更高,同时通过第一传感器实现对开合操作夹的开合角度监测、通过第二传感器采集操作部的旋转趋势并记录操作部的转动角度,降低了结构复杂度和成本,更利于产业化。更利于产业化。更利于产业化。
技术研发人员:请求不公布姓名
受保护的技术使用者:杭州唯精医疗机器人有限公司
技术研发日:2023.02.21
技术公布日:2023/5/31
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。