1.本发明涉及轮胎均匀性生产管理技术领域,具体的涉及轮胎均匀性管理系统及管理方法。
背景技术:
2.随着我国汽车工业和公路交通快速发展,人们对轮胎的舒适性要求不断提高。经大量研究表明,轮胎均匀性一次谐波和多次谐波跟车辆抖动与噪音有相当大关系。为此,各个轮胎厂商在改善轮胎均匀性上做出大量工作。
3.现有技术存在的主要问题有:
4.一是无法实现实时精准定位:现有的算法和技术主要依靠人工跟踪和计算,面对大量数据时人工计算速度较慢,无法实现实时和快速计算。二是硫化定位角度和成型角度无法实时反馈至前工序进行补偿改善:现有技术的计算结果依靠人工方式告知前工序,硫化和成型角度定位依靠人工目视方式进行,不能够精准定位。三是动平衡和均匀性的影响因素往往依靠技术人员的经验:现有技术的要因分离主要依靠技术人员多年的经验才能判定,无法做到通过数据模型进行量化分析。
5.cn113352664b中公开了一种改善轮胎均匀性径向力的轮胎定位硫化方法及轮胎,但只考虑径向力波动针对硫化入模角进行优化,采用全部数据的平均值作为分析对象,造成平移角度只能优化径向波峰波谷参数,对整体的均匀性如侧向缺少优化方式。
技术实现要素:
6.本发明的目的在于解决上述现有技术中存在的难题,提供一种胎的动平衡均匀性优化方法及系统,以解决无法实现实时精准定位、实时反馈、对整体的均匀性缺少优化方式的问题。
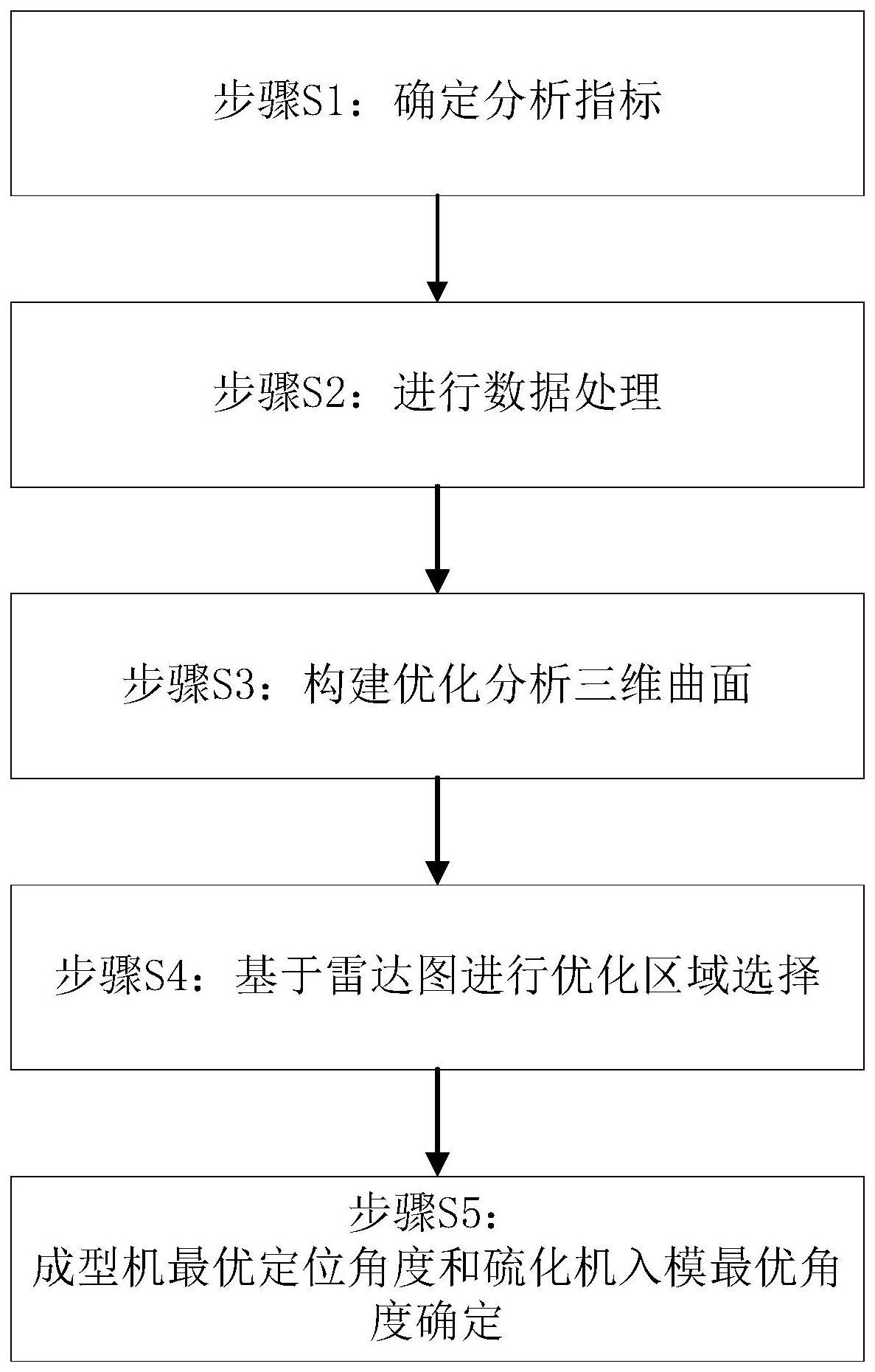
7.为了实现上述目的,本发明提供一种轮胎的动平衡均匀性优化方法,一种轮胎的动平衡均匀性优化方法,其特征在于,该方法包括以下步骤:
8.步骤s1:确定分析指标,包括径向力波动rfv、径向力1~10次谐波rfh1~rfh10、侧向力波动lfv、侧向力1~10次谐波lfh1~lfh10、侧向力偏移lsft、锥度效应力cony、角度效应力plsy;
9.步骤s2:进行数据处理,利用动平衡均匀性检测设备对轮胎进行测试,并进行数据有效性判定;
10.步骤s3:构建优化分析三维曲面;
11.步骤s4:基于雷达图进行优化区域选择;
12.步骤s5:成型机最优定位角度和硫化机入模最优角度确定。
13.优选的,步骤s2具体包括:步骤s201:同一台成型机定位角度和同一台硫化机入模角度分别间隔角度α,可分为m类,m=360/α,设组织n组实验,则实验共需要m*m*n条轮胎进行测试;
14.步骤s202:利用动平衡均匀性检测设备分别对n组的轮胎进行测试;
15.步骤s203:进行数据有效性判定,若某条轮胎测试得到的所述径向力波动rfv、所述侧向力波动lfv、所述侧向力偏移lsft、所述锥度效应力cony、所述角度效应力plsy数值一项或者多项大于设定阈值,则存在工艺问题,分析成型机和硫化机是否存在故障或者人工设定存在问题;问题处理后,舍弃该条轮胎数据,并按照该轮胎相同的成型机定位角度和硫化机入模角度生产一条轮胎,重新进行测试,直到满足指标要求为止。
16.优选的,步骤s3具体包括:设测定的波形数据分别为
17.径向:
18.侧向:
19.式中x
t
,t=1,2,
…
,n为第t组的角度变量;
20.对n组的数据进行平均
[0021][0022]
表示为傅里叶展开式考虑径向力波动及其1~10次谐波,且轮胎中心对称a0=0,上式简化为
[0023][0024]
利用傅里叶变换公式,得到一组参数:
[0025]
对于1-10次谐波,根据优化目标设定其权重w=(w1,w2,
…
,w
10
),其中
[0026]
考虑整体波动情况,波动幅值a
(ij)
表示为
[0027][0028]
则用i、j和a
(ij)
值拟合为三维曲面,记为sr;
[0029]
针对数据,通过上述方法拟合三维曲面,记为s
l
。
[0030]
优选的,步骤s4具体包括:结合所述径向力波动rfv、所述侧向力波动lfv、所述侧向力偏移lsft、所述锥度效应力cony、所述角度效应力plsy构建雷达图;每个指标指需多组数据取均值,第i类成型机定位角度和第j类硫化机入模角度,获得的所述径向力波动rfv计算
[0031][0032]
利用rfv
(ij)
、lfv
(ij)
、lsft
(ij)
、cony
(ij)
、plsy
(ij)
构建雷达图,根据雷达图选择多组i、j组合,在二维平面中选取包含所有(i、j)点的圆形s。
[0033]
优选的,步骤s5具体包括:
[0034]
结合径向和侧向的因素,将两个曲面加权相加,新的曲面s
p
为
[0035]sp
=wrsr w
lsl
,
[0036]
式中,wr、w
l
分别表示对径向和侧向均匀性优化的权重,wr w
l
=1;选择最小圆形s对应的曲面s
p
,然后选择此位置中最小值对应的(i
*
,j
*
)值;将(i
*
,j
*
)的值乘以角度α后,则i
*
α为成型机最优定位角度,j
*
α为硫化机入模最优角度。
[0037]
优选的,当成型机或者硫化机机型发生改变时,再次进行优化分析获得最优角度。
[0038]
本提案另一方面提供了一种轮胎的动平衡均匀性优化系统,包括:
[0039]
数据采集模块用于轮胎动平衡、均匀性数据采集,自动采集轮胎动平衡、均匀性检测机器的检测数据和波形数据;
[0040]
数据处理模块用于采集数据处理分析,包括定点硫化分析工具、要因分离分析工具、波形分析工具、成型定位分析工具;
[0041]
优化计算模块用于针对轮胎动平衡均匀性存在的问题,根据建立的优化模型和算法进行计算,获得硫化和成型的最优入模角度。
[0042]
优选的,所述定点硫化分析工具利用定点硫化算法分析轮胎均匀性检测数据和波形数据,找到每台硫化机最佳的入模角度。
[0043]
优选的额,所述要因分离分析工具通过对影响轮胎动平衡、均匀性因素的数字化建模,利用实时检测数据,实现影响因素的快速分离和定位;
[0044]
波形分析工具用于快速实现大数据量的波形展示、波形处理,快速发现缺陷。
[0045]
优选的,成型定位分析工具用于对轮胎成型工序进行角度定位,得到每台成型机最佳的成型角度,通过角度补偿实现轮胎均匀性指标的提升。
[0046]
与现有技术相比,本发明的有益效果是:
[0047]
1)综合考虑径向力波动、径向力1~10次谐波、侧向力波动、侧向力1~10次谐波、侧向力偏移、锥度效应力、角度效应力等指标,能够针对轮胎动平衡均匀性整体进行优化,提高了轮胎实际运行的均匀性效果。
[0048]
2)采用雷达图的方式,能够直观的选取非支配解,为对轮胎动平衡均匀性指标优化提供了一种高效方式。
[0049]
3)利用曲面极小值(鞍点)选取最优解,能够有效利用拟合的曲面信息,获得最优的成型机和硫化机最优角度。
附图说明
[0050]
图1为本发明实施例一的轮胎的动平衡均匀性优化方法流程示意图;
[0051]
图2为本发明实施例一基于雷达图优化选择方法的示意图;
[0052]
图3为本发明实施例一选取包含所有点的最小圆形。
具体实施方式
[0053]
下面结合附图对本发明作进一步详细描述:
[0054]
为了更好地理解本发明,下面结合附图来详细解释本发明的实施方式。
[0055]
本发明实施例一提供的种轮胎的动平衡均匀性优化方法,方法示意图如图1所示,具体包括如下步骤:
[0056]
步骤s1:确定分析指标;
[0057]
优化方法的输入参数为采集的数据经过数据处理分析得到径向力波动(rfv)、径向力1~10次谐波(rfh1~rfh10)、侧向力波动(lfv)、侧向力1~10次谐波(lfh1~lfh10)、侧向力偏移(lsft)、锥度效应力(cony)、角度效应力(plsy)。
[0058]
输出为成型机定位最优角度、硫化机入模最优角度。
[0059]
步骤s2:进行数据处理;
[0060]
步骤s201:同一台成型机定位角度和同一台硫化机入模角度分别间隔一定角度α,例如90
°
、60
°
,可分为m类,m=360/α。则组合共有m*m=m2类。设组织n组实验,则实验共需要m*m*n条轮胎进行测试。
[0061]
步骤s202:利用动平衡均匀性检测设备分别对n组的轮胎进行测试,测试数据通过数据采集模块输入至系统。
[0062]
步骤s203:数据有效性判定。如果某条轮胎测试得到的径向力波动(rfv)、侧向力波动(lfv)、侧向力偏移(lsft)、锥度效应力(cony)、角度效应力(plsy)数值一项或者多项大于设定阈值,则说明存在工艺问题,需要分析成型机和硫化机是否存在故障或者人工设定存在问题。将上述问题处理后,舍弃该条轮胎数据,并按照该轮胎相同的成型机定位角度和硫化机入模角度生产一条轮胎,重新进行测试,直到满足指标要求为止。
[0063]
步骤s3:构建优化分析曲面;
[0064]
由于波形数据需要转化分析其谐波的特点,因此需要进行处理,设测定的波形数据分别为:
[0065]
径向:
[0066]
侧向:
[0067]
式中x
t
,t=1,2,
…
,n为第t组的角度变量。
[0068]
以为例,为了消除个别轮胎测量误差,对n组的数据进行平均:
[0069][0070]
可表示为傅里叶展开式这里主要考虑径向力波动及其1~10次谐波,且轮胎中心对称a0=0,因此可以将上式简化为
[0071][0072]
利用傅里叶变换基本公式,通过数值计算方法可以得到一组参数:{a
1(ij)
,φ
1(ij)
}、{a
2(ij)
,φ
2(ij)
},
…
,{a
10(ij)
,φ
10(ij)
}。
[0073]
对于1-10次谐波,根据优化目标设定其权重w=(w1,w2,
…
,w
10
),其中
[0074]
考虑整体波动情况,波动幅值a
(ij)
表示如下:
[0075][0076]
则可以用i、j和a
(ij)
值拟合为三维曲面,记为sr。
[0077]
同理,针对数据,也可通过上述方法拟合三维曲面,记为s
l
。
[0078]
步骤s4:基于雷达图进行优化区域选择;
[0079]
除指标径向力1~10次谐波(rfh1~rfh10)、侧向力1~10次谐波(lfh1~lfh10)外,其余指标径向力波动(rfv)、侧向力波动(lfv)、侧向力偏移(lsft)、锥度效应力(cony)、角度效应力(plsy)构建雷达图。每个指标指需多组数据取均值,以第i类成型机定位角度和第j类硫化机入模角度,获得的径向力波动(rfv)计算为例:
[0080][0081]
则可以利用rfv
(ij)
、lfv
(ij)
、lsft
(ij)
、cony
(ij)
、plsy
(ij)
构建雷达图,由于i,j∈{1,2,
…
,m},因此共有m*m个数据。
[0082]
由于多指标之间的非支配关系,所以根据雷达图选择多组i、j组合,在二维平面中选取包含所有(i、j)点的圆形s。
[0083]
步骤s5:成型机最优定位角度和硫化机入模最优角度确定;
[0084]
由于需要考虑径向和侧向的因素,可将两个曲面加权相加,新的曲面s
p
为
[0085]sp
=wrsr w
lsl
[0086]
式中,wr、w
l
分别表示对径向和侧向均匀性优化的权重,wr w
l
=1。如果其中一个为0,则只针对某一向的均匀性进行优化。
[0087]
选择最小圆形s对应的曲面s
p
,然后选择该位置中最小值(鞍点)对应的(i
*
,j
*
)值,由于在拟合的曲面上选取最小值,因此这里(i
*
,j
*
)可不为整数;将(i
*
,j
*
)的值乘以角度α后,则i
*
α为成型机最优定位角度,j
*
α为硫化机入模最优角度。
[0088]
注意,本发明得出的成型机最优定位角度、硫化机入模最优角度只针对同一测试机器有效,如果成型机或者硫化机改变,需要按上述方案再次进行实验,分析新数据获得最优角度。
[0089]
本发明另一方面提供了一种轮胎的动平衡均匀性优化系统,包含数据采集模块、数据处理模块、优化计算模块。
[0090]
数据采集模块用于轮胎动平衡、均匀性数据采集,可以自动采集轮胎动平衡、均匀性检测机器的检测数据和波形数据,数据采集接口能够兼容市面上主流动平衡、均匀性检测设备。
[0091]
数据处理模块用于采集数据处理分析,包括定点硫化分析工具、要因分离分析工具、波形分析工具、成型定位分析工具。其中:
[0092]
定点硫化分析工具:利用定点硫化算法分析轮胎均匀性检测数据和rfv波形数据,从而找到每台硫化机最佳的入模角度,期望进一步提升轮胎均匀性指标。
[0093]
要因分离分析工具:通过对影响轮胎动平衡、均匀性因素的数字化建模,利用实时检测数据,实现影响因素的快速分离和定位,帮助用户能够快速定位生产过程中的不良因素,从而快速提升轮胎动平衡均匀性指标,提升工作效率。
[0094]
波形分析工具:轮胎检测的波形数据对分析轮胎质量缺陷至关重要,通过波形分析工具能够快速实现大数据量的波形展示、波形处理,帮助用户快速发现缺陷。
[0095]
成型定位分析工具:利用成型角度定位算法对轮胎成型工序进行角度定位,从而
找到每台成型机最佳的成型角度,并通过角度补偿实现轮胎均匀性指标的提升。
[0096]
优化计算模块主要针对轮胎动平衡均匀性存在的问题,根据建立的优化模型和算法进行计算,获得硫化和成型的最优入模角度。
[0097]
本发明另一方面提供了一种动平衡均匀性专家管理系统,通过采集分析轮胎动平衡均匀性检测数据,实现动平衡均匀性指标提升的系统。
[0098]
动平衡均匀性专家管理系统是通过与动平衡检测机、均匀性检测机的数据接口或数据文件的方式采集动平衡和均匀性检测数据,可实现全自动化数据采集和分析,用户无需干预即可完成定点硫化和成型定位的角度计算。同时可连接胎胚自动物流系统、成型机等生产和物流设备,完成硫化入模角度和成型定位角度的精准控制。此外,用户可利用本系统对生产过程中的影响因素进行快速分析定位,实现质量缺陷的快速识别和解决。
[0099]
本系统利用科学有效的算法及大量检测数据,通过将动平衡、均匀性检测的波形信号实时传输至服务器端cpu,实现了快速精准的硫化机入模角度定位和成型角度定位。采集、控制流程全自动化,无需人工干预,可在短时间内实现角度的精准定位,节省了大量的人工作业量。利用计算机的运算优势,能够实现7*24小时不间断的监控,同时可监控多台生产机器。系统采用模块化设计理念,能够兼容市面上主流动平衡、均匀性检测设备,同时支持主流的硫化机、成型机品牌。本系统实现了实时将后工序检测结果反馈至前工序生产,并通过硫化角度补偿和成型角度补偿实现轮胎动平衡均匀性的提升。解决了传统人工作业时无法快速处理大量数据,无法实现实时的数据反馈,定位控制不精准。
[0100]
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0101]
在本发明的描述中,除非另有说明,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0102]
最后应说明的是,上述技术方案只是本发明的一种实施方式,对于本领域内的技术人员而言,在本发明公开了应用方法和原理的基础上,很容易做出各种类型的改进或变形,而不仅限于本发明上述具体实施方式所描述的方法,因此前面描述的方式只是优选的,而并不具有限制性的意义。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。