1.本发明属于测量结构技术领域,尤其涉及一种支撑托座指针装置。
背景技术:
2.在武器热发射技术领域,产品需要由车辆运输保证较强的机动性能,在兼顾越野、机动的同时,要支撑托座对运输过程中的产品进行减振,以保证产品不被损坏,目前国内使用的支撑托座大多采用的是碟簧组作为减振缓冲元件,在支撑托座设置于车辆上,包括顶面为弧形的托块,托块的底端设置于多组碟簧,托块上还设置于有指针,碟簧被压缩和复位的过程中,指针随托块直上直下,通过指针上下移动读取碟簧压缩量,但指针位于产品的下方,空间狭窄导致读数困难,影响发射车的检修作业。
技术实现要素:
3.本技术旨在至少能够在一定程度上解决现有的支撑托座自带指针不易观察的技术问题,为此,本技术提供了一种支撑托座指针装置。
4.为了实现以上目的,本技术的技术方案如下:
5.一种支撑托座指针装置,设置于支撑托座上,所述支撑托座包括座体和设置于所述座体上方的支撑座,所述座体和所述支撑座之间设置有多组碟簧;
6.所述指针装置包括底座、转轴、指针和标尺,所述标尺设置于车辆,所述底座设置于所述座体和所述支撑座之间,所述转轴设置于所述底座,所述转轴的轴线水平,所述指针可转动设置于所述转轴上,所述指针包括驱动臂和指向臂,所述驱动臂与所述支撑座的底面相抵,所述驱动臂与所述支撑座的底面之间的夹角为锐角,所述指向臂指向所述标尺,所述指向臂的长度大于所述驱动臂的长度。
7.在一些实施方式中,所述驱动臂与所述指向臂分别位于所述转轴的轴线的两侧。
8.在一些实施方式中,所述驱动臂与所述指向臂之间的夹角为钝角。
9.在一些实施方式中,所述驱动臂呈板状,所述驱动臂与所述支撑座的底面相抵的一端设置有圆弧面,所述圆弧面所在圆柱的轴线平行于所述转轴的轴线。
10.在一些实施方式中,所述圆弧面为半圆弧面。
11.在一些实施方式中,所述支撑所的底面设置有限位槽,所述驱动部的端部滑动设置于所述限位槽内。
12.在一些实施方式中,所述指向臂的长度是所述驱动臂的长度的两倍以上。
13.在一些实施方式中,所述转轴可拆卸设置于所述底座,所述底座的顶端设置有凹槽,所述凹槽的相对槽壁分别设置有两个相对的通孔,所述转轴与两个所述通孔过盈配合,所述转轴的一端设置有堵头,所述转轴的另一端套接有挡圈,所述挡圈与所述底座的外壁相抵,所述指针套接于所述转轴上,所述指针位于两个所述通孔之间。
14.在一些实施方式中,所述指针装置还包括扭簧,所述扭簧的两端分别与所述驱动臂和所述底座固定连接。
15.在一些实施方式中,所述扭簧套接于所述转轴。
16.本技术实施例至少具有如下有益效果:
17.由上述技术方案可知,本发明公开的指针装置通过驱动臂和指针的协同作用,利用杠杆原理,使得标尺的位置能够放置在易于观察的位置,作业人员站在车辆的左侧或者右侧即可观察到指针指向的位置,大幅提升检修效率,且指向臂的长度大于驱动臂的长度,那么指向臂端部在标尺上的变化幅度将更大,更易于作业人员读取数据,进一步提高作业人员的检修效率。
附图说明
18.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
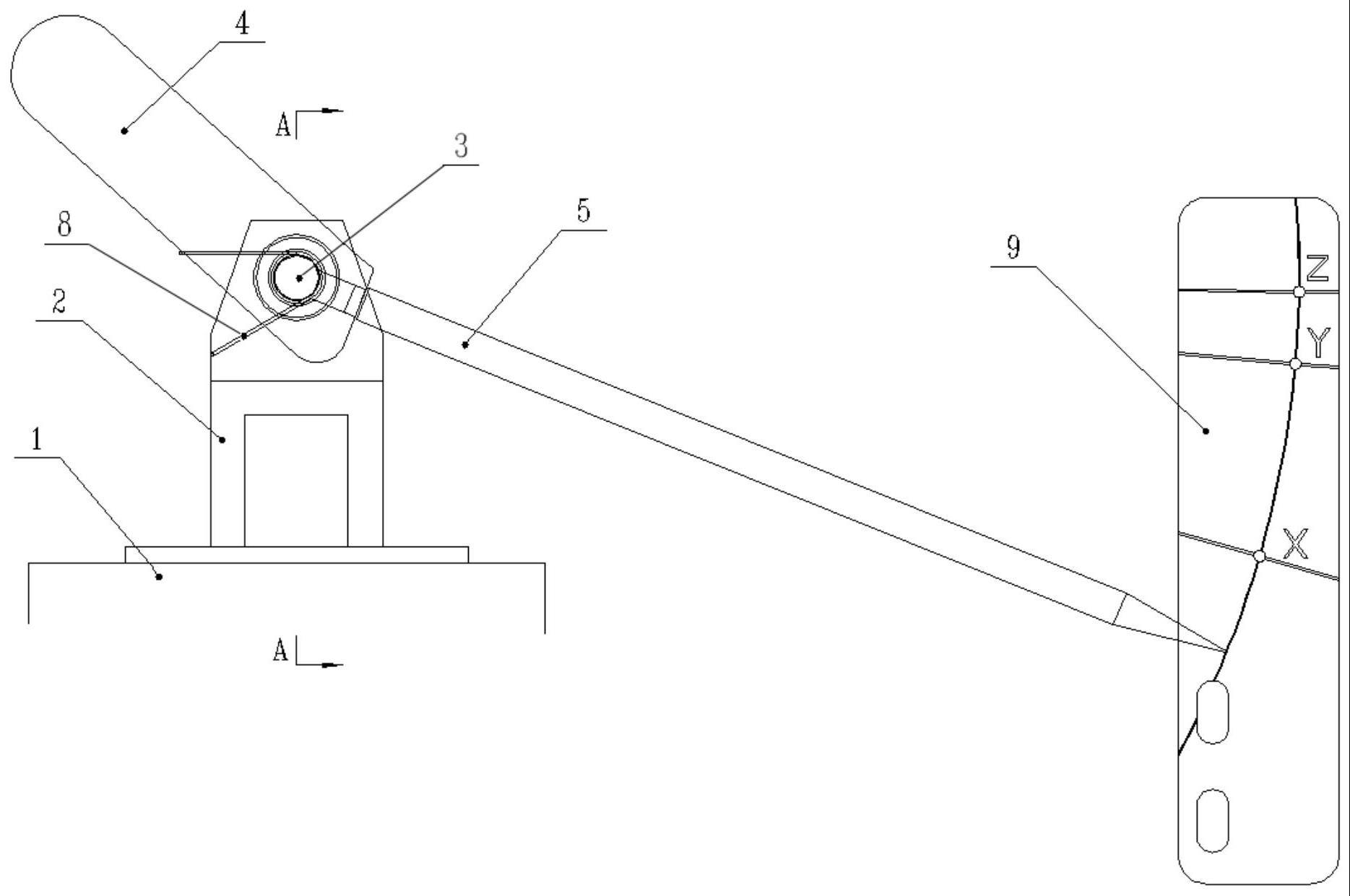
19.图1示出了本技术实施例中指针装置的结构示意图;
20.图2示出了图1中的指针装置的使用状态结构示意图;
21.图3示出了图1中的指针装置的a-a向剖视图;
22.图中标记:1-座体,2-底座,3-转轴,4-驱动臂,5-指向臂,6-垫片,7-挡圈,8-扭簧,9-标尺。
具体实施方式
23.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术的一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
24.此外,本技术可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。此外,本技术提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。
25.下面结合附图并参考具体实施例描述本技术:
26.如图1、图2和图3所示,本实施例提供了一种支撑托座指针装置,设置于支撑托座上,用于获取支撑托座的碟簧的形变数据。支撑托座包括座体1和设置于座体1上方的支撑座,座体1设置于车辆上,支撑座的顶面具有弧面,以匹配产品的外形,初始状态,产品的长度方向车辆车身长度方向处于同一竖直平面上,座体1和支撑座之间设置有多组碟簧,多组碟簧沿车辆的宽度方向间隔设置,相邻组的碟簧具有较宽的间隙以容纳本实施例的指针装置。
27.指针装置包括底座2、转轴3、指针和标尺9,标尺9竖直设置于车辆上,标尺9上标注有多个刻度,分别指代碟簧所处的状态,例如预警状态、静在状态和动载状态。底座2设置于座体1和支撑座之间,转轴3设置于底座2,转轴3的轴线水平,指针可转动设置于转轴3上,指针包括驱动臂4和指向臂5,即底座2、驱动臂4和指向臂5构成杠杆结构,驱动臂4与支撑座的
底面相抵,驱动臂4与支撑座的底面之间的夹角为锐角,指向臂5指向标尺9,可以理解的,参照图1和图2,当碟簧在竖直方向被压缩时,驱动臂4的端部将在支撑座的压力下沿着垂直于转轴3轴向的方向移动,并改变驱动臂4与支撑座的底面之间的夹角,进而使得指向臂5绕转轴3转动,改变指向臂5的端部指向标尺9的位置。指向臂5的长度大于驱动臂4的长度,即指向臂5重于驱动臂4,那么在碟簧恢复形变的过程中,碟簧高度增加,在指向臂5的重量的作用下,驱动臂4的端部依旧保持与支撑座的底面接触的状态,但是驱动臂4与支撑座的底面之间的夹角变大,指向臂5端部所指向的标尺9的位置也会改变。一般来说,标尺9位于碟簧的前侧或者后侧,且标尺9竖直设置,作业人员站在车辆的左侧或者右侧即可观察到指针指向的位置,易于观察,可大幅提升检修效率,且指向臂5的长度大于驱动臂4的长度,那么指向臂5端部在标尺9上的变化幅度将更大,更易于作业人员读取数据。本实施例中,指向臂5的长度是驱动臂4的长度的两倍以上,进一步的,指向臂5的长度是驱动臂4的长度的两倍,在易于观察的基础上,避免指针占用过多的空间。
28.当然,驱动臂4与指向臂5也可位于转轴3的轴线的同侧且驱动臂4与指向臂5之间的夹角为锐角,同时设置扭簧8,使得驱动臂4能够保持与支撑座的底面的接触,参照图1,本实施例中,驱动臂4与指向臂5分别位于转轴3的轴线的两侧,合理利用指向臂5的重量。
29.考虑到座体1和支撑座本身的尺寸,驱动臂4与指向臂5之间的夹角为钝角,指向臂5不易磕碰到底座2的顶面,对应的标尺9的在车辆上的位置可更靠上,更利于作业人员观察。
30.驱动臂4呈板状,驱动臂4与支撑座的底面相抵的一端设置有圆弧面,圆弧面所在圆柱的轴线平行于转轴3的轴线,即驱动臂4的端部可以顺滑地在支撑座的底面上移动,驱动臂4不易损坏支撑座的底面,使得指针在长时间的使用过程中,都能保证良好的精度要求。进一步的,圆弧面为半圆弧面。当然,驱动臂4可以呈柱状,其端面呈球面,可以保证驱动臂4端部的顺滑移动,作为另一种可行的方式,在驱动臂4的端部设置辊轮,将滑动摩擦变为滚动摩擦,对支撑座的底面的影响更小。
31.进一步的,为了提高,指针运行的稳定度,支撑所的底面设置有限位槽,限位槽的长度方向垂直于转轴3的轴向,驱动部的端部滑动设置于限位槽内,通过限位槽相对两槽壁对驱动臂4的限制,避免指针出现车辆宽度方向的晃动,提高指针的稳定性,降低损坏率。
32.参照图1和图3,转轴3可拆卸设置于底座2,以便于作业人员进行检修,跟换零部件。具体来说,底座2通过螺栓连接的方式固定安装于座体1的顶面,且底座2位于座体1顶面靠近边缘处,以避免指向臂5的侧壁磕碰到座体1顶端,底座2的顶端设置有凹槽,凹槽的相对槽壁分别设置有两个相对的通孔,转轴3穿过两个通孔且与两个通孔过盈配合,转轴3的一端设置有堵头,转轴3的另一端套接有挡圈7,挡圈7与底座2的外壁相抵,通过堵头和挡圈7将转轴3固定设置在底座2上,指针套接于转轴3上,指针位于两个通孔之间。指针的中部可设置于轴承,轴承的内圈与转轴3固定连接,轴承的外圈与指针固定连接,将指针与转轴3之间的滑动摩擦转化为滚动摩擦,提升指针转动的顺滑度,进而提高指针装置获取碟簧数据的精准度。
33.考虑到车辆在运输过程中存在颠簸的情况,指针装置还包括扭簧8,扭簧8的两端分别与驱动臂4和底座2固定连接,以使得驱动臂4的端部能够时刻保持与支撑座的顶面接触,避免出现因车辆颠簸,驱动臂4与支撑座的底面之间发生碰撞的情况,保证指针装置能
够时刻保证高精度的测量。进一步的,扭簧8套接于转轴3,扭簧8位于两个通孔之间,通过转轴3限制扭簧8,使得扭簧8不易出现非弹性形变,进一步提升指针装置的使用耐久。为了保证指针不会轻易地沿转轴3的轴向移动,指针与凹槽槽壁之间还设置有垫片6,扭簧8、指针和垫片6紧密排布。
34.在本技术中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
35.在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
36.需要说明的是,本技术实施例中所有方向性指示仅用于解释在某一特定姿态下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
37.在本技术中,除非另有明确的规定和限定,术语“连接”、“固定”等应做广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
38.另外,在本技术中如涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者多个所述特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
39.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。此外,本领域的技术人员可以将本说明书中描述的不同实施例或示例进行接合和组合。
40.另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本技术要求的保护范围之内。
41.尽管已经示出和描述了本技术的实施方式,本领域的普通技术人员可以理解:在不脱离本技术的原理和宗旨的情况下可以对这些实施方式进行多种变化、修改、替换和变型,本技术的范围由权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。