1.本发明涉及平面切割路径规划技术领域,特别是指尤其涉及一种平面切割路径规划的方法、系统及计算机存储介质。
背景技术:
2.平面切割在很多工业应用上都占有很高的比重,然而随着信息技术的发展和劳动成本的上升,工业生产自动化已然成为行业发展的一个大趋势,这也对当前的平面切割技术提出了更高的要求:高质量、高精度、高效率完成切割任务才能适应自动化工业生产的需要。
3.在平面切割问题中,路径规划是一项非常重要的内容,从目前的研究现状来看,在平面切割路径规划与优化研究领域中,整体的研究趋势是将平面切割路径规划问题建模为广义旅行商问题及其变体问题,在裁片长度固定的情况下,尽量减小空程长度才能尽可能减少刀具切割路径移动的距离。
4.由于广义旅行商问题的特殊性,其不仅要对集合进行拓扑排序,还要在每个集合中选择恰当的点构成最短回路。在广义旅行商问题的求解方案上,仿生算法和群智能算法等启发式算法是主流的解决方案,利用启发式算法和局部搜索算法搜寻广义旅行商问题的最优解。
5.但是,现有的广义旅行商问题的求解方案通常为遗传算法和其他一些仿生算法,这些算法通常在实现上较为复杂,特别是对于广义旅行商问题,遗传算法中解的表示尤为重要且复杂,这就造成了在路径寻优问题上的困难。
6.其次,遗传算法并不能很好的利用现有的一些信息,在收敛速度上很慢,特别是在大规模广义旅行商问题中,算法的收敛快慢是一个重要影响因素。
技术实现要素:
7.本发明提供了一种平面切割路径规划的方法、系统及计算机存储介质,以解决平面切割路径规划中广义旅行商问题程路径寻优困难,算法收敛速度慢的技术问题。
8.本发明提供的技术方案如下:
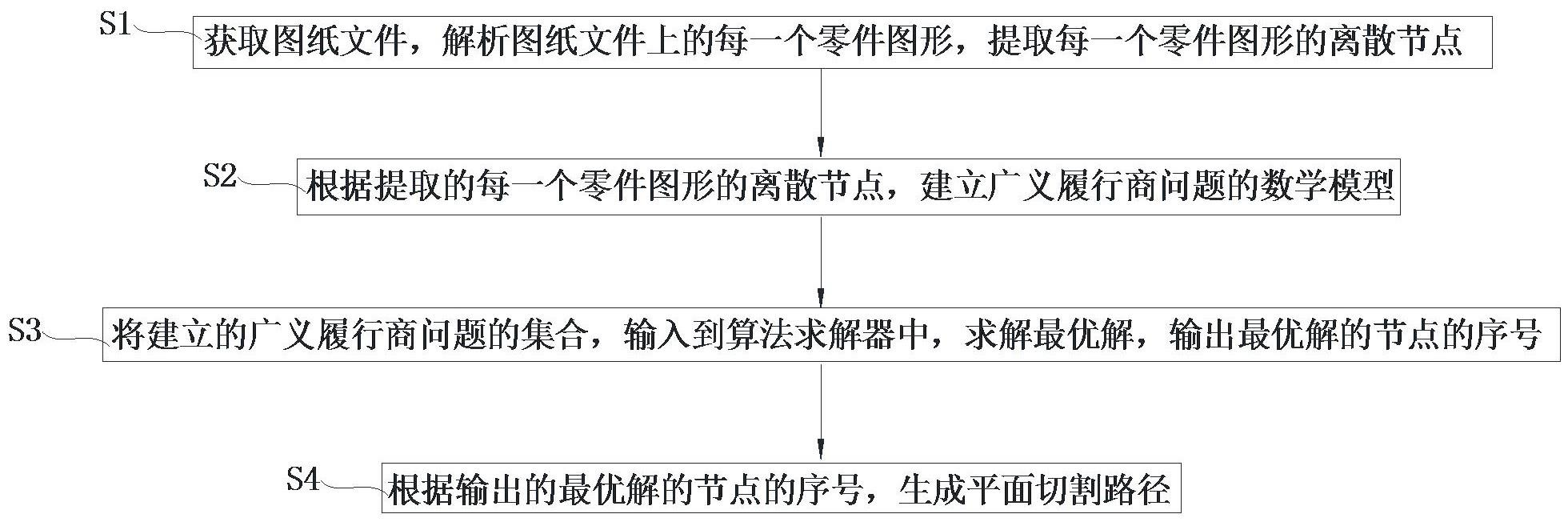
9.本发明的一个目的在于提供一种平面切割路径规划的方法,所述方法包括如下方法步骤:
10.s1、获取图纸文件,解析图纸文件上的每一个零件图形,提取每一个零件图形的离散节点;
11.s2、根据提取的每一个零件图形的离散节点,建立广义旅行商问题的数学模型;
12.其中,所有零件图形的离散节点按顺序编号,选取一个节点作为广义旅行商问题的数学模型的起始节点,每一个零件图形的离散节点,构成广义旅行商问题的数学模型的一个查询集合;
[0013] s3、将建立的广义旅行商问题的查询集合和起始节点,输入到算法求解器中,求
解最优解,输出最优解的节点的序号;
[0014]
s4、根据输出的最优解的节点的序号,生成平面切割路径。
[0015]
在一个较佳的实施例中,在步骤s1中,解析得到的每一个零件图形包括点、直线和圆弧;
[0016]
以每一个零件图形的点、直线的起点和圆弧的起点,作为每一个零件图形的离散节点。
[0017]
在一个较佳的实施例中,在步骤s3中,通过如下方法求解最优路径:
[0018]
s301、在建立的广义旅行商问题的数学模型中,随机生成多个当前解,并选取其中一个当前解作为最优解,其中,每一个当前解中包括预设路径的节点集合,和预设路径的边集合;
[0019]
s302、选择删除启发式算法,利用选择的删除启发式算法,从每一个当前解的节点集合中选择个节点,并将选择的个节点删除,形成多个删除解;
[0020]
s303、选择插入启发式算法,利用选择的插入启发式算法,在每一个删除解中,插入个节点,形成多个插入解;
[0021] s304、对每一个插入解进行局部优化,得到多个迭代解;
[0022]
s305、比较每一个迭代解与最优解的权重:当,则该迭代解替换最优解,并且将该迭代解作为下一次迭代的当前解,当,则判断该迭代解是否作为下一次迭代的当前解,其中,是迭代解的哈密顿环的长度,是最优解的哈密顿环的长度;并且,更新删除启发式算法和插入启发式算法的选择权重;
[0023] s306、重复步骤s302至步骤s305进行迭代,直至满足停机准则,输出最优解路径的节点的序号。
[0024]
在一个较佳的实施例中,在步骤s302中,个节点中的每一个节点,按照如下方法删除:
[0025]
定义非归一化的概率质量函数,初始化参数和当前解的节点集合内的节点个数;
[0026]
根据非归一化的概率质量函数,选择当前解的节点集合内,评估值最小的节点删除,其中,是非归一化的概率质量函数的参数,是节点的评估值,是节点的序号;从当前解的边集合内删除边和,并添加边,形成多个删除解。
[0027]
在一个较佳的实施例中,评估值通过如下方法计算:
ꢀ
,其中,是节点的评估值,是节点的序号,是两个节点之间的欧氏距离。
[0028]
在一个较佳的实施例中,评估值通过如下方法计算:,其中,是节点的评估值,是节点的序号,是两个节点之间的欧氏距离,是已删除的节点中随机选择的节点。
[0029]
在一个较佳的实施例中,在步骤s302中,在当前解的节点集合内,随机选择的个节点删除。 在一个较佳的实施例中,在步骤s303中,个节点中的每一个节点,按照如下方法插入:
[0030]
定义非归一化的概率质量函数,初始化参数和删除解的节点集合内的节点个数,根据非归一化的概率质量函数,选择距离删除解的节点集合,最近的查询集合;在删除解的节点集合,与查询集合之间寻找一条边,在查询集合中寻找一个节点,使其满足: ,在节点x和节点y之间插入节点,其中,是两个节点之间的欧氏距离。
[0031]
在一个较佳的实施例中,通过如下方法计算,与删除解的节点集合,最近的查询集合的距离:
[0032] ,其中,是删除解的节点集合内的任意一个节点。
[0033]
在一个较佳的实施例中,在步骤s304中,通过如下方法对插入解进行局部优化:
[0034] s3041、创建一个有向无环图,其中,有向无环图中包括所有的查询集合、插入解的节点集合,并对所有的查询集合进行排序;
[0035] s3042、以每一个查询集合中的每一个节点连接下一个查询集合中的每一个节点,最后一个查询集合的节点连接到第一个查询集合的节点,利用dijkstra算法求最短路径; s3043、在插入解的节点集合中,删除一个节点,并插入一个新节点,使插入插入解与步骤s3042计算的最短路径最接近;s3044、重复步骤s3041至步骤s3043,对每一个插入解进行局部优化。
[0036]
在一个较佳的实施例中,在步骤s305中,当,通过如下方法判断该迭代解是否作为下一次迭代的当前解:计算迭代解被接受的概率:
[0037]
,其中,是迭代解
的哈密顿环的长度,是最优解的哈密顿环的长度;
[0038]
随机生成一个数,当计算得到的迭代解被接受的概率小于随机生成的数,则该迭代解作为下一次迭代的当前解;否则,该迭代解不进入下一次迭代。
[0039]
在一个较佳的实施例中,在步骤s305中,通过如下方法,更新删除启发式算法和插入启发式算法的选择权重:计算删除启发式算法和插入启发式算法的评估分:
[0040] ,其中,是迭代解的哈密顿环的长度,是最优解的哈密顿环的长度;计算更新删除启发式算法和插入启发式算法的选择权重:
[0041]
,其中,是删除启发式算法和插入启发式算法的选择权重,是系数,是删除启发式算法和插入启发式算法的评估分;比较更新后的删除启发式算法和插入启发式算法,与其他删除启发式算法和插入启发式算法的选择权重,将选择权重大的删除启发式算法和插入启发式算法作为下一次迭代的删除启发式算法和插入启发式算法。
[0042]
在一个较佳的实施例中,在s306中,停机准则包括:第一阶段,固定迭代次数,当最优解不发生变化时,停止步骤s302至s305的迭代;第二阶段,采用模拟退火接受准则,对不发生变化的最优解,查找新的最优解,将查找到的新的最优解作为输出的最优解。
[0043]
本发明的另一个目的在于提供一种平面切割路径规划的系统,用于执行本发明提供一种平面切割路径规划的方法,包括:
[0044]
零件图形提取模块,用于获取图纸文件,解析图纸文件上的每一个零件图形,提取每一个零件图形的离散节点;
[0045]
建模模块,用于根据提取的每一个零件图形的离散节点,建立广义旅行商问题的数学模型;
[0046]
其中,所有零件图形的离散节点按顺序编号,选取一个节点作为广义旅行商问题的数学模型的起始节点,每一个零件图形的离散节点,构成广义旅行商问题的数学模型的一个查询集合;
[0047]
路径规划模块,用于将建立的广义旅行商问题的查询集合,输入到算法求解器中,求解最优解,输出最优解的节点的序号;
[0048]
路径生成模块,根据输出的最优解的节点的序号,生成平面切割路径。
[0049]
本发明的又一个目的在于提供一种计算机存储介质,用于存储有计算机执行指令,计算机执行指令,用于执行本发明提供一种平面切割路径规划的方法。
[0050]
本发明上述技术方案,与现有技术相比至少具有如下有益效果:
[0051]
本发明提供一种平面切割路径规划的方法、系统及计算机存储介质,在平面切割
路径规划中,对建立的广义旅行商问题的数学模型求解最优解的过程中,通过选择删除启发式算法和插入启发式算法,并在迭代过程中更新删除启发式算法和插入启发式算法求解最优解,从而降低平面切割路径规划中广义旅行商问题程路径寻优的困难。
[0052]
本发明提供一种平面切割路径规划的方法、系统及计算机存储介质,求解广义旅行商问题的数学模型的算法收敛速度快,能够快速找到平面切割的最优路径,大幅提高平面切割效率,最小化切割资源的损耗,具有操作简单、速度快、效率高的优点。
附图说明
[0053]
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0054]
图1是本发明一种平面切割路径规划的方法的流程图。
[0055]
图2是本发明解析的图纸文件上的每一个零件图形的示意图。
[0056]
图3是本发明一个实施例中求解最优解的迭代过程示意图。
[0057]
图4是本发明选择删除启发式算法和插入启发式算法的示意图。
[0058]
图5是本发明一个实施例中对插入解进行局部优化的示意图。
具体实施方式
[0059]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例的附图,对本发明实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于所描述的本发明的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0060]
除非另外定义,本发明使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。本发明中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。同样,“一个”、“一”或者“该”等类似词语也不表示数量限制,而是表示存在至少一个。“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。
[0061]
需要说明的是,本发明中使用的“上”、“下”、“左”、“右”“前”“后”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
[0062]
如图1所示本发明一种平面切割路径规划的方法的流程图,根据本发明的实施例,提供一种平面切割路径规划的方法,包括如下方法步骤:
[0063]
步骤s1、获取图纸文件,解析图纸文件上的每一个零件图形,提取每一个零件图形的离散节点。
[0064]
本发明的实施例图纸文件是裁片(需要切割的平面)的dxf文件,dxf文件的基本结构是由一些段组成,通过这些段,dxf文件就可以完成相应几何图形(零件)的描述。图纸文件包含了对零件的轮廓信息描述,包括坐标、尺寸、颜色等信息。在实际工业应用中,零件通
常为多边闭合图形,本发明针对的零件为闭合图形。
[0065]
如图2所示本发明解析的图纸文件上的每一个零件图形的示意图,图纸文件c上有多个零件图形j。使用dxf2gcode软件解析图纸文件c上的每一个零件图形j,解析得到的每一个零件图形j包括点、直线和圆弧。以每一个零件图形的点、直线的起点和圆弧的起点,作为每一个零件图形j的离散节点。
[0066]
步骤s2、根据提取的每一个零件图形j的离散节点,建立广义旅行商问题的数学模型。
[0067]
根据本发明的实施例,所有零件图形j的离散节点按顺序编号,选取一个节点作为广义旅行商问题的数学模型的起始节点q,每一个零件图形j的离散节点,构成广义旅行商问题的数学模型的一个查询集合。
[0068]
起始节点q作为切割的起始点和终止点,多个零件图形j的离散节点,构成广义旅行商问题的数学模型的多个查询集合。
[0069]
步骤s3、将建立的广义旅行商问题的查询集合,输入到算法求解器中,求解最优解,输出最优解的节点的序号。
[0070]
根据本发明的实施例,将建立的广义旅行商问题的查询集合和起始节点q输入到算法求解器,通过如下方法求解最优路径:
[0071]
步骤s301、在建立的广义旅行商问题的数学模型中,随机生成多个当前解,并选取其中一个当前解作为最优解。
[0072]
本发明的实施例中,每一个当前解中包括预设路径的节点集合,和预设路径的边集合。
[0073]
如图3所示本发明一个实施例中求解最优解的迭代过程示意图,随机生成多个当前解,例如1、 2、 3、
……
。从多个当前解中一个当前解作为最优解,例如选取1作为最优解。
[0074]
步骤s302、选择删除启发式算法,利用选择的删除启发式算法,从每一个当前解的节点集合中选择个节点,并将选择的个节点删除,形成多个删除解。
[0075]
如图4所示本发明选择删除启发式算法和插入启发式算法的示意图,在多个删除启发式算法(remove)中,选择一个选择权最大的删除启发式算法。例如,多个删除启发式算法中,删除启发式算法a的选择权重为60、删除启发式算法b的选择权重为70、删除启发式算法c的选择权重为55、删除启发式算法d的选择权重为65、
……
,选择选择权重为70的删除启发式算法b。
[0076]
利用选择的删除启发式算法,从每一个当前解的节点集合中选择个节点,并将选择的个节点删除。个节点中的每一个节点,按照如下方法删除:
[0077]
定义非归一化的概率质量函数,初始化参数和当前解的节点集合内的节点个数;根据非归一化的概率质量函数,选择当前解的节点集合内,评估值最小的节点删除,其中,是非归一化的概率质量函数的参数,是节点的评估值,
是节点的序号;从当前解的边集合内删除边和,并添加边,形成多个删除解。
[0078]
根据本发明的实施例,评估值通过如下方法计算:
[0079]
,其中,是节点的评估值,是节点的序号,是两个节点之间的欧氏距离。
[0080]
在一些实施例中,当已经在个节点中删除了一些节点,评估值通过如下方法计算:
[0081]
,其中,是节点的评估值,是节点的序号,是两个节点之间的欧氏距离,是已删除的节点中随机选择的节点。
[0082]
在一些实施例中,在当前解的节点集合内,随机选择的个节点删除,以通过破坏原有的解来逃避局部极小。
[0083]
步骤s303、选择插入启发式算法,利用选择的插入启发式算法,在每一个删除解中,插入个节点,形成多个插入解。
[0084]
如图4所示,在多个插入启发式算法(insert)中,选择一个选择权最大的插入启发式算法。例如,多个插入启发式算法中,插入启发式算法a’的选择权重为60、插入启发式算法b’的选择权重为70、插入启发式算法c’的选择权重为55、插入启发式算法d’的选择权重为65、
……
,选择选择权重为70的插入启发式算法b’。
[0085]
利用选择的插入启发式算法,在每一个删除解中,插入个节点。个节点中的每一个节点,按照如下方法插入:
[0086]
定义非归一化的概率质量函数,初始化参数和删除解的节点集合内的节点个数,根据非归一化的概率质量函数,选择距离删除解的节点集合,最近的查询集合,在删除解的节点集合,与查询集合之间寻找一条边,在查询集合中寻找一个节点,使其满足:
[0087] ,在节点x和节点y之间插入节点,其中,是两个节点之间的欧氏距离。
[0088]
根据本发明的实施例,通过如下方法计算,与删除解的节点集合,最近的查询集合的距离:
[0089]
,其中,是删除解的节点集合内的任意一个节点。
[0090]
步骤s304、对每一个插入解进行局部优化,得到多个迭代解。
[0091]
在步骤s303中形成多个插入解,对每一个插入解进行局部优化。本发明通过如下方法对每一个插入解进行局部优化:步骤s3041、创建一个有向无环图,其中,有向无环图中包括所有的查询集合、插入解的节点集合,并对所有的查询集合进行排序。
[0092]
如图5所示本发明一个实施例中对插入解进行局部优化的示意图,本发明示例性以5个零件图形j的离散节点构成的查询集合为例,分别为查询集合、查询集合、查询集合、查询集合和查询集合。
[0093]
在有向无环图中包含了经过步骤s303中形成的插入解,如图5所实线所示的路径。
[0094]
步骤s3042、以每一个查询集合中的每一个节点连接下一个查询集合中的每一个节点,最后一个查询集合的节点连接到第一个查询集合的节点,利用dijkstra(迪杰斯特拉)算法求最短路径。
[0095]
例如,5个查询集合排序后为:查询集合、查询集合、查询集合、查询集合和查询集合。查询集合的每一个节点连接查询集合的每一个节点,查询集合的每一个节点连接查询集合的每一个节点,查询集合的每一个节点连接查询集合的每一个节点,查询集合的每一个节点连接查询集合的每一个节点,查询集合的每一个节点连接查询集合的节点。
[0096]
步骤s3043、在插入解的节点集合中,删除一个节点,并插入一个新节点,使插入插入解与步骤s3042计算的最短路径最接近。
[0097]
步骤s3044、重复步骤s3041至步骤s3043,对每一个插入解进行局部优化,得到多个迭代解。
[0098]
步骤s305、比较每一个迭代解与最优解的权重,并更新删除启发式算法和插入启发式算法的选择权重。
[0099]
根据本发明的实施例,在步骤s304中得到多个迭代解,通过比较多个迭代解与最优解的权重,选择进入下一次迭代的当前解,以及更新最优解。
[0100]
具体地,根据本发明的实施例,比较每一个迭代解与最优解的权重:
[0101]
当,则该迭代解替换最优解,并且将该迭代解作为下一次迭代的当前解。
[0102]
其中,是迭代解的哈密顿环的长度(权重),是最优解的哈密顿环的长度(权重)。
[0103]
如图3所示,举例来说,在第一次迭代(iter1)时,在随机生成的多个当前解中,选择一个当前解(例如选取1)作为最优解。经过步骤s302至s304后,在生成的多个迭代解中,当某一个迭代解的权重小于或等于最优解的权重,则将该迭代解替换最优解,并且将该迭代解作为下一
次迭代的当前解,进入第二次迭代。
[0104]
当,则判断该迭代解是否作为下一次迭代的当前解。
[0105]
其中,是迭代解的哈密顿环的长度(权重),是最优解的哈密顿环的长度(权重)。
[0106]
根据本发明的实施例,当,通过如下方法判断该迭代解是否作为下一次迭代的当前解:计算迭代解被接受的概率:
[0107]
,其中,是迭代解的哈密顿环的长度(权重),是最优解的哈密顿环的长度(权重)。
[0108]
随机生成一个数,当计算得到的迭代解被接受的概率小于随机生成的数,则该迭代解作为下一次迭代的当前解;否则,该迭代解不进入下一次迭代。
[0109]
如图3所示,举例来说,经过步骤s302至s304后,在生成的多个迭代解中,当某一个迭代解的权重大于最优解的权重,则计算该迭代解被接受的概率。
[0110]
例如,当计算得到的该迭代解被接受的概率为=0.3,随机生成一个数为0.5,则该迭代解作为下一次迭代的当前解,否则该迭代解不进入下一次迭代。
[0111]
经过步骤s305,生成了多个第二次迭代(iter2)的当前解,并且对最优解进行了更新。
[0112]
根据本发明的实施例,更新删除启发式算法和插入启发式算法的选择权重,具体地,通过如下方法更新删除启发式算法和插入启发式算法的选择权重:
[0113]
计算删除启发式算法和插入启发式算法的评估分:
[0114]
,其中,是迭代解的哈密顿环的长度(权重),是最优解的哈密顿环的长度(权重)。
[0115]
计算更新删除启发式算法和插入启发式算法的选择权重:
[0116]
,其中,是删除启发式算法和插入启发式算法的选择权重,是系数,是删除启发式算法和插入启发式算法的评估分。
[0117]
比较更新后的删除启发式算法和插入启发式算法,与其他删除启发式算法和插入启发式算法的选择权重。
[0118]
将选择权重大的删除启发式算法和插入启发式算法作为下一次迭代的
删除启发式算法和插入启发式算法。
[0119]
如图4所示,举例来说,本发明在第一次迭代过程中,选择了选择权重为70的删除启发式算法b和选择权重为70的插入启发式算法b’,经过步骤s305,对删除启发式算法b和插入启发式算法b’的选择权重进行更新,例如更新后的删除启发式算法b的选择权重为50,插入启发式算法b’的选择权重为80。
[0120]
更新后将删除启发式算法b和插入启发式算法b’的选择权重与其他删除启发式算法和插入启发式算法的选择权重比较,选择权重大的删除启发式算法和插入启发式算法作为下一次迭代的删除启发式算法和插入启发式算法。
[0121]
例如,将选择权重为65的删除启发式算法d和选择权重为80插入启发式算法b’作为下一次迭代的删除启发式算法和插入启发式算法。
[0122]
步骤s306、重复步骤s302至步骤s305进行迭代,直至满足停机准则,输出最优解路径的节点的序号。
[0123]
重复步骤s302至s305进行多次迭代,如图3所示,经过第一次迭代(iter1)、第二次迭代(iter2)、第三次迭代(iter3)、
……
,直至满足停机准则,输出最优解路径(最优解)的节点的序号。
[0124]
根据本发明的实施例,停机准则包括两个阶段:
[0125]
第一阶段,固定迭代次数(例如迭代10次),当最优解不发生变化(最优解不再更新)时,停止步骤s302至s305的迭代。
[0126]
第二阶段,采用模拟退火接受准则,对不发生变化的最优解,查找新的最优解,将查找到的新的最优解作为输出的最优解。
[0127]
步骤s4、根据输出的最优解的节点的序号,生成平面切割路径。
[0128]
具体地,以起始点q为起始,按照输出的最优解的节点序号,连接生成平面切割的最优路径,如图2虚线所形成的路径。
[0129]
具体的实施例中,解析输出的最优解的节点序号,根据最优解的节点序号,对每个零件图形j的离散节点构成的查询集合进行排序,从起始节点q开始,按最优解的节点序号连接生成平面切割的最优路径,在显示界面显示。
[0130]
同时,将输出的最优解的节点序号生成指令,写入执行文件,控制平面切割的切刀对裁片上的零件进行切割。
[0131]
根据本发明的实施例,提供一种平面切割路径规划的系统,用于执行本发明一种平面切割路径规划的方法,包括:
[0132]
零件图形提取模块,用于获取图纸文件,解析图纸文件上的每一个零件图形,提取每一个零件图形的离散节点;
[0133]
建模模块,用于根据提取的每一个零件图形的离散节点,建立广义旅行商问题的数学模型;
[0134]
其中,所有零件图形的离散节点按顺序编号,选取一个节点作为广义旅行商问题的数学模型的起始节点,每一个零件图形的离散节点,构成广义旅行商问题的数学模型的一个查询集合;
[0135]
路径规划模块,用于将建立的广义旅行商问题的查询集合,输入到算法求解器中,
求解最优解,输出最优解的节点的序号;
[0136]
路径生成模块,根据输出的最优解的节点的序号,生成平面切割路径。
[0137]
根据本发明的实施例,提供一种计算机存储介质,用于存储有计算机执行指令。计算机执行指令,用于执行本发明一种平面切割路径规划的方法。
[0138]
有以下几点需要说明:
[0139]
(1)本发明实施例附图只涉及到与本发明实施例涉及到的结构,其他结构可参考通常设计。
[0140]
(2)为了清晰起见,在用于描述本发明的实施例的附图中,层或区域的厚度被放大或缩小,即这些附图并非按照实际的比例绘制。可以理解,当诸如层、膜、区域或基板之类的元件被称作位于另一元件“上”或“下”时,该元件可以“直接”位于另一元件“上”或“下”或者可以存在中间元件。
[0141]
(3)在不冲突的情况下,本发明的实施例及实施例中的特征可以相互组合以得到新的实施例。
[0142]
以上,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,本发明的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。