1.本发明涉及轴向间隙电机、径向间隙电机及机器人。
背景技术:
2.在专利文献1中公开了一种轴向间隙电机,其具备:第一定子及第二定子;以及转子,具有分别以海尔贝克阵列排列的第一磁铁层及第二磁铁层。通过设置这样的磁铁层,能够增强电机间隙中的磁场强度。由此,能够提高轴向间隙电机的转矩密度。
3.专利文献1:日本特开2019-33578号公报
4.但是,在专利文献1中,没有特别提及磁铁层的内外径尺寸比、磁铁数。因此,关于这些要素,还有改善电机的转矩的余地。
技术实现要素:
5.本发明的应用例所涉及的轴向间隙电机的特征在于,具备:
6.励磁,呈圆环状,并具有构成海尔贝克阵列的多个磁极,所述多个磁极在1个周期中包含第一主磁极及第二主磁极,所述第一主磁极在沿着旋转轴的第一方向上被磁化,所述第二主磁极在与所述第一方向相反的第二方向上被磁化;以及
7.电枢,在沿着所述旋转轴的方向上与所述励磁相对地配置,
8.所述励磁的内半径与外半径之比为0.2以上且0.8以下,
9.在将所述海尔贝克阵列的周期数设为极对数时,所述极对数为8以上。
10.本发明的应用例所涉及的径向间隙电机的特征在于,具备:
11.励磁,呈圆环状,并具有构成海尔贝克阵列的多个磁极,所述多个磁极在1个周期中包含第三主磁极及第四主磁极,所述第三主磁极在与旋转轴正交的第三方向上被磁化,所述第四主磁极在与所述第三方向相反的第四方向上被磁化;以及
12.电枢,在与所述旋转轴正交的方向上与所述励磁相对地配置,
13.在将所述海尔贝克阵列的周期数设为极对数时,所述极对数为8以上。
14.本发明的应用例所涉及的机器人的特征在于,具备臂和使所述臂移动的关节,
15.在所述关节设置有海尔贝克阵列电机,
16.所述海尔贝克阵列电机是本发明的应用例所涉及的轴向间隙电机或本发明的应用例所涉及的径向间隙电机。
附图说明
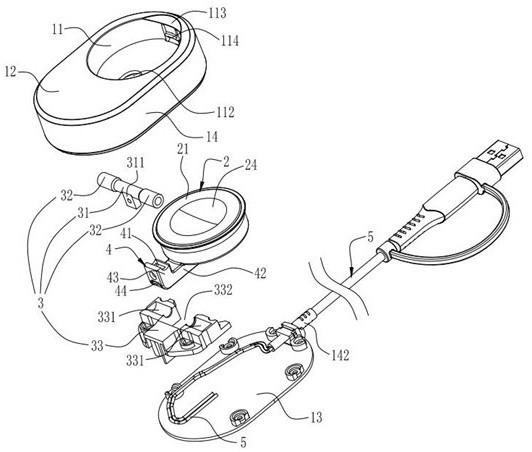
17.图1是表示第一实施方式所涉及的轴向间隙电机的概略结构的剖视图。
18.图2是表示图1的轴向间隙电机的电枢的俯视图。
19.图3是表示图1的轴向间隙电机的励磁的俯视图。
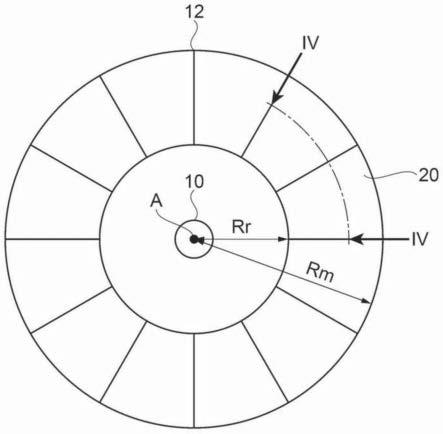
20.图4是用于说明从图3的iv-iv线观察的励磁的磁化方向的示意图。
21.图5是表示轴向间隙电机的励磁与电枢的间隙g为0.5mm、l=1~4、内半径rr为
40mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
22.图6是表示轴向间隙电机的励磁与电枢的间隙g为1.0mm、l=1~4、内半径rr为40mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
23.图7是表示轴向间隙电机的励磁与电枢的间隙g为1.5mm、l=1~4、内半径rr为40mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
24.图8是表示轴向间隙电机的励磁与电枢的间隙g为2.0mm、l=1~4、内半径rr为40mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
25.图9是表示轴向间隙电机的励磁与电枢的间隙g为0.5mm、l=1~4、内半径rr为30mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
26.图10是表示轴向间隙电机的励磁与电枢的间隙g为1.0mm、l=1~4、内半径rr为30mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
27.图11是表示轴向间隙电机的励磁与电枢的间隙g为1.5mm、l=1~4、内半径rr为30mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
28.图12是表示轴向间隙电机的励磁与电枢的间隙g为2.0mm、l=1~4、内半径rr为30mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
29.图13是表示轴向间隙电机的励磁与电枢的间隙g为0.5mm、l=1~4、内半径rr为20mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
30.图14是表示轴向间隙电机的励磁与电枢的间隙g为1.0mm、l=1~4、内半径rr为20mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
31.图15是表示轴向间隙电机的励磁与电枢的间隙g为1.5mm、l=1~4、内半径rr为20mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
32.图16是表示轴向间隙电机的励磁与电枢的间隙g为2.0mm、l=1~4、内半径rr为20mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
33.图17是表示轴向间隙电机的励磁与电枢的间隙g为0.5mm、l=1~4、内半径rr为10mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
34.图18是表示轴向间隙电机的励磁与电枢的间隙g为1.0mm、l=1~4、内半径rr为10mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
35.图19是表示轴向间隙电机的励磁与电枢的间隙g为1.5mm、l=1~4、内半径rr为10mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
36.图20是表示轴向间隙电机的励磁与电枢的间隙g为2.0mm、l=1~4、内半径rr为10mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
37.图21是表示轴向间隙电机的励磁与电枢的间隙g为0.5mm、l=1~4、内半径rr为80mm、外半径rm为100mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
38.图22是表示轴向间隙电机的励磁与电枢的间隙g为1.0mm、l=1~4、内半径rr为80mm、外半径rm为100mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
39.图23是表示轴向间隙电机的励磁与电枢的间隙g为1.5mm、l=1~4、内半径rr为80mm、外半径rm为100mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
40.图24是表示轴向间隙电机的励磁与电枢的间隙g为2.0mm、l=1~4、内半径rr为80mm、外半径rm为100mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
41.图25是图21所示的图表的局部放大图。
42.图26是表示第二实施方式所涉及的轴向间隙电机的概略结构的剖视图。
43.图27是表示第三实施方式所涉及的径向间隙电机的概略结构的剖视图。
44.图28是表示第三实施方式所涉及的径向间隙电机的概略结构的俯视图。
45.图29是用于说明从沿着旋转轴的方向观察图28所示的励磁时励磁的磁化方向的示意图。
46.图30是用于说明从沿着旋转轴的方向观察图28所示的励磁时励磁的磁化方向的示意图。
47.图31是用于说明从沿着旋转轴的方向观察图28所示的励磁时励磁的磁化方向的示意图。
48.图32是用于说明从沿着旋转轴的方向观察图28所示的励磁时励磁的磁化方向的示意图。
49.图33是表示径向间隙电机的励磁与电枢的间隙为1.0mm、l=1~4的模型的极对数ρ与励磁的表面磁通密度的基波分量pb
1,l
的关系的图表。
50.图34是表示第四实施方式所涉及的机器人的立体图。
51.图35是图34所示的机器人的概略图。
52.附图标记说明
[0053]1…
轴向间隙电机,1a
…
轴向间隙电机,1b
…
径向间隙电机,10
…
轴,11
…
电枢,11a
…
第一电枢,11b
…
第二电枢,12
…
励磁,12a
…
第一励磁,12b
…
第二励磁,12a
…
励磁,12b
…
励磁,12c
…
励磁,12d
…
励磁,13
…
背轭,13a
…
第一背轭,13b
…
第二背轭,14
…
铁芯,14a
…
铁芯,14b
…
铁芯,15
…
线圈,15a
…
线圈,15b
…
线圈,20
…
磁极,21a
…
第一主磁极,21b
…
第一主磁极,21c
…
第一主磁极,21d
…
第一主磁极,22a
…
第二主磁极,22b
…
第二主磁极,22c
…
第二主磁极,22d
…
第二主磁极,23b
…
辅助磁极,23c
…
辅助磁极,23d
…
辅助磁极,24b
…
辅助磁极,24c
…
辅助磁极,24d
…
辅助磁极,25c
…
辅助磁极,25d
…
辅助磁极,26c
…
辅助磁极,26d
…
辅助磁极,27d
…
辅助磁极,28d
…
辅助磁极,60
…
轴,61
…
电枢,62
…
励磁,62a
…
励磁,62b
…
励磁,62c
…
励磁,62d
…
励磁,63
…
背轭,64
…
铁芯,65
…
轭部,66
…
肋部,67
…
线圈,68
…
磁极,68a
…
第三主磁极,68b
…
第三主磁极,68c
…
第三主磁极,68d
…
第三主磁极,69a
…
第四主磁极,69b
…
第四主磁极,69c
…
第四主磁极,69d
…
第四主磁极,70b
…
辅助磁极,70c
…
辅助磁极,70d
…
辅助磁极,71b
…
辅助磁极,71c
…
辅助磁极,71d
…
辅助磁极,72c
…
辅助磁极,72d
…
辅助磁极,73c
…
辅助磁极,73d
…
辅助磁极,74d
…
辅助磁极,75d
…
辅助磁极,100
…
机器人,101
…
地板,110
…
第一臂,120
…
第二臂,130
…
第三臂,140
…
第四臂,150
…
第五臂,160
…
第六臂,171
…
关节,172
…
关节,173
…
关节,174
…
关节,175
…
关节,176
…
关节,400
…
基台,401
…
驱动部,401m
…
电机,402
…
驱动部,402m
…
电机,403
…
驱动部,403m
…
电机,404
…
驱动部,404m
…
电机,405
…
驱动部,405m
…
电机,406
…
驱动部,406m
…
电机,1000
…
机器人臂,a
…
旋转轴,o1
…
第一转动轴,o2
…
第二转动轴,o3
…
第三转动轴,o4
…
第四转动轴,o5
…
第五转动轴,o6
…
第六转动轴,rm
…
外半径,rr
…
内半径。
具体实施方式
[0054]
以下,基于附图所示的实施方式对本发明的轴向间隙电机、径向间隙电机及机器
人详细地进行说明。
[0055]
1.第一实施方式
[0056]
首先,对第一实施方式所涉及的轴向间隙电机进行说明。
[0057]
图1是表示第一实施方式所涉及的轴向间隙电机的概略结构的剖视图。图2是表示图1的轴向间隙电机的电枢的俯视图。图3是表示图1的轴向间隙电机的励磁的俯视图。图4是用于说明从图3的iv-iv线观察的励磁的磁化方向的示意图。
[0058]
如图1所示,第一实施方式所涉及的轴向间隙电机1具备轴10、电枢11、第一励磁12a、第一背轭13a、第二励磁12b及第二背轭13b。在轴向间隙电机1中,沿着旋转轴a的方向,即沿着轴10,依次排列有第一励磁12a、电枢11及第二励磁12b。因此,电枢11在沿着旋转轴a的方向上分别与第一励磁12a及第二励磁12b相对。而且,在电枢11与第一励磁12a之间及电枢11与第二励磁12b之间,分别设置有间隙。在轴向间隙电机1中,电枢11为定子,第一励磁12a及第二励磁12b分别为转子。
[0059]
第一励磁12a配置在电枢11与第一背轭13a之间。第二励磁12b配置在电枢11与第二背轭13b之间。第一励磁12a及第二励磁12b具有彼此相同的结构。在轴向间隙电机1中,具备以夹入电枢11的方式配置的第一励磁12a及第二励磁12b,但励磁的数量可以是1个,也可以是3个以上。以下,将第一励磁12a和第二励磁12b中的任一个简称为励磁12。
[0060]
如图2所示,电枢11呈圆环状。电枢11具有多个铁芯14及多个线圈15。各铁芯14呈具有沿着轴10的高度的棱柱状。各铁芯14例如由软磁性体构成的多个板的层叠体或软磁性粉末的压粉体构成。多个铁芯14例如通过被线轴支承而固定相互的位置关系。各线圈15具有沿着铁芯14的侧面卷绕的绕组。
[0061]
铁芯14的数量根据流过线圈15的电流的相数来设定,但在本实施方式中,为18个。在该情况下,铁芯14及线圈15以相对于旋转轴a具有18次旋转对称性的方式,沿着以旋转轴a为中心的圆周等间隔地排列。而且,在线圈15中,在排列方向上循环地流过u相、v相、w相这三相的电流。
[0062]
如图3所示,励磁12呈圆环状。励磁12具有沿着以旋转轴a为中心的圆周排列的多个磁极20。磁极20例如是永久磁铁。多个磁极20在排列方向上具有周期性不同的磁化方向。具体而言,多个磁极20在每1个周期中包含一个在沿着旋转轴a的第一方向上被磁化的第一主磁极和在与第一方向相反的第二方向上被磁化的第二主磁极。因此,图3所示的励磁12具有6个周期的磁极20。
[0063]
如图4所示,若将排列方向上的每半个周期的磁极20的数量设为l,则l=1的励磁12a每1个周期具有2个磁极20。一个磁极20包括第一主磁极21a,另一个磁极20包括第二主磁极22a。因此,励磁12a所具有的多个磁极20分别在沿着旋转轴a的第一方向或第二方向上被磁化。
[0064]
l=2的励磁12b每1个周期具有2个磁极20。一个磁极20包括第一主磁极21b及辅助磁极23b作为2个区段。另一个磁极20包括第二主磁极22b及辅助磁极24b作为2个区段。从与旋转轴a正交的方向观察,励磁12b的各区段具有与相邻的区段相差90
°
的磁化方向。另外,励磁12b的各区段在排列方向上依次具有以与旋转轴a正交的方向为轴每次旋转90
°
的方式变化的磁化方向。
[0065]
l=3的励磁12c每1个周期具有2个磁极20。一个磁极20包括第一主磁极21c、辅助
磁极23c及辅助磁极24c作为3个区段。另一个磁极20包括第二主磁极22c、辅助磁极25c及辅助磁极26c作为3个区段。从与旋转轴a正交的方向观察,励磁12c的各区段具有与相邻的区段相差60
°
的磁化方向。另外,励磁12c的各区段在排列方向上依次具有以与旋转轴a正交的方向为轴每次旋转60
°
的方式变化的磁化方向。
[0066]
l=4的励磁12d每1个周期具有2个磁极20。一个磁极20包括第一主磁极21d、辅助磁极23d、辅助磁极24d及辅助磁极25d作为4个区段。另一个磁极20包括第二主磁极22d、辅助磁极26d、辅助磁极27d及辅助磁极28d作为4个区段。从与旋转轴a正交的方向观察,励磁12d的各区段具有与相邻的区段相差45
°
的磁化方向。另外,励磁12d的各区段在排列方向上依次具有以与旋转轴a正交的方向为轴每次旋转45
°
的方式变化的磁化方向。
[0067]
励磁12b、12c、12d分别具有的多个磁极20构成海尔贝克阵列。这样,l≥2的励磁12所具有的多个磁极20构成海尔贝克阵列。在具有海尔贝克阵列的轴向间隙电机1中,电枢11配置于海尔贝克阵列的强磁场侧。即,在图1所示的例子中,第一励磁12a及第二励磁12b以各自的强磁场侧彼此相对的方式配置。
[0068]
具有构成海尔贝克阵列的磁极20的轴向间隙电机1能够增大励磁12的表面上的磁通密度,因此能够提高转矩常数。特别是,在l为3以上的情况下,能够使排列方向上的磁通密度的变化平滑,能够进一步提高转矩常数。
[0069]
通常,在输入电流i流过线圈时,在转子磁铁中产生的转矩t使用转矩常数k
t
由下述式(1)表示。
[0070]
【数学式1】
[0071]
t=k
tiꢀꢀꢀ…
(1)
[0072]
根据洛伦兹力的定义,转矩常数k
t
由下述式(2)表示。
[0073]
【数学式2】
[0074][0075]
根据上述式(2),能够导出多个磁极20的排列中的周期数与转矩常数k
t
的关系。以下,对该关系进行说明。
[0076]
ρ是多个磁极20的排列中的周期数。在本说明书中,将ρ称为极对数。q是流过电枢11的电流的相数,在本实施方式中,为3。n是线圈15的匝数。α是线圈15相对于槽间距的开角,即,线圈15的排列间距相对于旋转轴a所成的角度。rr是励磁12的内半径。rm是励磁12的外半径。b
1,l
(r)是第l区段的磁极20的间隙中的磁通密度的基波振幅。
[0077]
图5是表示轴向间隙电机1的励磁12与电枢11的间隙g为0.5mm、l=1~4、内半径rr为40mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。此外,间隙g是励磁12a与电枢11的沿着旋转轴a的分离距离。
[0078]
在多个磁极20构成海尔贝克阵列的励磁12b、12c、12d中,由图5的l=2~4的标记可知,转矩常数k
t
随着极对数ρ的增加而单调地增加。单调地增加是指在增加的过程中不伴随减少。另外,在极对数ρ大致为8以上时,l=2~4的转矩常数k
t
超过l=1的转矩常数k
t
。
[0079]
另一方面,在多个磁极20不构成海尔贝克阵列、即构成通常的排列的励磁12a中,由图5的l=1的标记可知,在极对数ρ=90附近,转矩常数k
t
取极大值。其中,其极大值比l=
2~4的转矩常数k
t
低。
[0080]
图6是表示轴向间隙电机1的励磁12与电枢11的间隙g为1.0mm、l=1~4、内半径rr为40mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
[0081]
在多个磁极20构成海尔贝克阵列的励磁12b、12c、12d中,由图6的l=2~4的标记可知,在极对数ρ=50~70时,转矩常数k
t
取极大值。另外,在极对数ρ大致为8以上时,l=2~4的转矩常数k
t
超过l=1的转矩常数k
t
。
[0082]
另一方面,多个磁极20构成通常的排列的励磁12a中,由图6的l=1的标记可知,在极对数ρ=60~80时,转矩常数k
t
取极大值。其中,其极大值比l=2~4的极大值低。
[0083]
图7是表示轴向间隙电机1的励磁12与电枢11的间隙g为1.5mm、l=1~4、内半径rr为40mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
[0084]
在多个磁极20构成海尔贝克阵列的励磁12b、12c、12d中,由图7的l=2~4的标记可知,在极对数ρ=25~40时,转矩常数k
t
取极大值。另外,在极对数ρ大致为8以上时,l=2~4的转矩常数k
t
超过l=1的转矩常数k
t
。
[0085]
另一方面,在多个磁极20构成通常的排列的励磁12a中,由图7的l=1的标记可知,在极对数ρ=30~45时,转矩常数k
t
取极大值。其中,其极大值比l=2~4的极大值低。
[0086]
图8是表示轴向间隙电机1的励磁12与电枢11的间隙g为2.0mm、l=1~4、内半径rr为40mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
[0087]
在多个磁极20构成海尔贝克阵列的励磁12b、12c、12d中,由图8的l=2~4的标记可知,在极对数ρ=20~30时,转矩常数k
t
取极大值。另外,在极对数ρ大致为8以上时,l=2~4的转矩常数k
t
超过l=1的转矩常数k
t
。
[0088]
另一方面,在多个磁极20构成通常的排列的励磁12a中,由图8的l=1的标记可知,在极对数ρ=15~25时,转矩常数kt取极大值。其中,其极大值比l=2~4的极大值低。
[0089]
图9是表示轴向间隙电机1的励磁12与电枢11的间隙g为0.5mm、l=1~4、内半径rr为30mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
[0090]
在多个磁极20构成海尔贝克阵列的励磁12b、12c、12d中,由图9的l=2~4的标记可知,转矩常数k
t
随着极对数ρ的增加而单调地增加。另外,在极对数ρ大致为8以上时,l=2~4的转矩常数k
t
超过l=1的转矩常数k
t
。
[0091]
另一方面,在多个磁极20构成通常的排列的励磁12a中,由图9的l=1的标记可知,在极对数ρ=70~90时,转矩常数k
t
取极大值。其中,其极大值比l=2~4的转矩常数k
t
低。
[0092]
图10是表示轴向间隙电机1的励磁12与电枢11的间隙g为1.0mm、l=1~4、内半径rr为30mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
[0093]
在多个磁极20构成海尔贝克阵列的励磁12b、12c、12d中,由图10的l=2~4的标记可知,在极对数ρ=45~65时,转矩常数k
t
取极大值。另外,在极对数ρ大致为8以上时,l=2~4的转矩常数k
t
超过l=1的转矩常数k
t
。
[0094]
另一方面,在多个磁极20构成通常的排列的励磁12a中,由图10的l=1的标记可知,在极对数ρ=50~70时,转矩常数kt取极大值。其中,其极大值比l=2~4的极大值低。
[0095]
图11是表示轴向间隙电机1的励磁12与电枢11的间隙g为1.5mm、l=1~4、内半径rr为30mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
[0096]
在多个磁极20构成海尔贝克阵列的励磁12b、12c、12d中,由图11的l=2~4的标记
可知,在极对数ρ=20~40时,转矩常数k
t
取极大值。另外,在极对数ρ大致为8以上时,l=2~4的转矩常数k
t
超过l=1的转矩常数k
t
。
[0097]
另一方面,在多个磁极20构成通常的排列的励磁12a中,由图11的l=1的标记可知,在极对数ρ=25~45时,转矩常数k
t
取极大值。其中,其极大值比l=2~4的极大值低。
[0098]
图12是表示轴向间隙电机1的励磁12与电枢11的间隙g为2.0mm、l=1~4、内半径rr为30mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
[0099]
在多个磁极20构成海尔贝克阵列的励磁12b、12c、12d中,由图12的l=2~4的标记可知,在极对数ρ=15~25时,转矩常数k
t
取极大值。另外,在极对数ρ大致为8以上时,l=2~4的转矩常数k
t
超过l=1的转矩常数k
t
。
[0100]
另一方面,在多个磁极20构成通常的排列的励磁12a中,由图12的l=1的标记可知,在极对数ρ=15~25时,转矩常数kt取极大值。其中,其极大值比l=2~4的极大值低。
[0101]
图13是表示轴向间隙电机1的励磁12与电枢11的间隙g为0.5mm、l=1~4、内半径rr为20mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
[0102]
在多个磁极20构成海尔贝克阵列的励磁12b、12c、12d中,由图13的l=2~4的标记可知,转矩常数k
t
随着极对数ρ的增加而单调地增加。另外,在极对数ρ大致为8以上时,l=2~4的转矩常数k
t
超过l=1的转矩常数k
t
。
[0103]
另一方面,在多个磁极20构成通常的排列的励磁12a中,由图13的l=1的标记可知,在极对数ρ=65~85时,转矩常数k
t
取极大值。其中,其极大值比l=2~4的转矩常数k
t
低。
[0104]
图14是表示轴向间隙电机1的励磁12与电枢11的间隙g为1.0mm、l=1~4、内半径rr为20mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
[0105]
在多个磁极20构成海尔贝克阵列的励磁12b、12c、12d中,由图14的l=2~4的标记可知,在极对数ρ=40~60时,转矩常数k
t
取极大值。另外,在极对数ρ大致为8以上时,l=2~4的转矩常数k
t
超过l=1的转矩常数k
t
。
[0106]
另一方面,在多个磁极20构成通常的排列的励磁12a中,由图14的l=1的标记可知,在极对数ρ=50~70时,转矩常数k
t
取极大值。其中,其极大值比l=2~4的极大值低。
[0107]
图15是表示轴向间隙电机1的励磁12与电枢11的间隙g为1.5mm、l=1~4、内半径rr为20mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
[0108]
在多个磁极20构成海尔贝克阵列的励磁12b、12c、12d中,由图15的l=2~4的标记可知,在极对数ρ=20~35时,转矩常数k
t
取极大值。另外,在极对数ρ大致为8以上时,l=2~4的转矩常数k
t
超过l=1的转矩常数k
t
。
[0109]
另一方面,在多个磁极20构成通常的排列的励磁12a中,由图15的l=1的标记可知,在极对数ρ=25~40时,转矩常数k
t
取极大值。其中,其极大值比l=2~4的极大值低。
[0110]
图16是表示轴向间隙电机1的励磁12与电枢11的间隙g为2.0mm、l=1~4、内半径rr为20mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
[0111]
在多个磁极20构成海尔贝克阵列的励磁12b、12c、12d中,由图16的l=2~4的标记可知,在极对数ρ=12~22时,转矩常数k
t
取极大值。另外,在极对数ρ大致为8以上时,l=2~4的转矩常数k
t
超过l=1的转矩常数k
t
。
[0112]
另一方面,在多个磁极20构成通常的排列的励磁12a中,由图16的l=1的标记可
知,在极对数ρ=12~22时,转矩常数k
t
取极大值。其中,其极大值比l=2~4的极大值低。
[0113]
图17是表示轴向间隙电机1的励磁12与电枢11的间隙g为0.5mm、l=1~4、内半径rr为10mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
[0114]
在多个磁极20构成海尔贝克阵列的励磁12b、12c、12d中,由图17的l=2~4的标记可知,转矩常数k
t
随着极对数ρ的增加而单调地增加。另外,在极对数ρ大致为8以上时,l=2~4的转矩常数k
t
超过l=1的转矩常数k
t
。
[0115]
另一方面,在多个磁极20构成通常的排列的励磁12a中,由图17的l=1的标记可知,在极对数ρ=60~80时,转矩常数k
t
取极大值。其中,其极大值比l=2~4的转矩常数k
t
低。
[0116]
图18是表示轴向间隙电机1的励磁12与电枢11的间隙g为1.0mm、l=1~4、内半径rr为10mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
[0117]
在多个磁极20构成海尔贝克阵列的励磁12b、12c、12d中,由图18的l=2~4的标记可知,在极对数ρ=35~55时,转矩常数k
t
取极大值。另外,在极对数ρ大致为8以上时,l=2~4的转矩常数k
t
超过l=1的转矩常数k
t
。
[0118]
另一方面,在多个磁极20构成通常的排列的励磁12a中,由图18的l=1的标记可知,在极对数ρ=45~65时,转矩常数k
t
取极大值。其中,其极大值比l=2~4的极大值低。
[0119]
图19是表示轴向间隙电机1的励磁12与电枢11的间隙g为1.5mm、l=1~4、内半径rr为10mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
[0120]
在多个磁极20构成海尔贝克阵列的励磁12b、12c、12d中,由图19的l=2~4的标记可知,在极对数ρ=20~30时,转矩常数k
t
取极大值。另外,在极对数ρ大致为8以上时,l=2~4的转矩常数k
t
超过l=1的转矩常数k
t
。
[0121]
另一方面,在多个磁极20构成通常的排列的励磁12a中,由图19的l=1的标记可知,在极对数ρ=25~40时,转矩常数k
t
取极大值。其中,其极大值比l=2~4的极大值低。
[0122]
图20是表示轴向间隙电机1的励磁12与电枢11的间隙g为2.0mm、l=1~4、内半径rr为10mm、外半径rm为50mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
[0123]
在多个磁极20构成海尔贝克阵列的励磁12b、12c、12d中,由图20的l=2~4的标记可知,在极对数ρ=10~20时,转矩常数k
t
取极大值。另外,在极对数ρ大致为8以上时,l=2~4的转矩常数k
t
超过l=1的转矩常数k
t
。
[0124]
另一方面,在多个磁极20构成通常的排列的励磁12a中,由图20的l=1的标记可知,在极对数ρ=10~20时,转矩常数k
t
取极大值。其中,其极大值比l=2~4的极大值低。
[0125]
图21是表示轴向间隙电机1的励磁12与电枢11的间隙g为0.5mm、l=1~4、内半径rr为80mm、外半径rm为100mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
[0126]
在多个磁极20构成海尔贝克阵列的励磁12b、12c、12d中,由图21的l=2~4的标记可知,转矩常数k
t
随着极对数ρ的增加而单调地增加。另外,在极对数ρ大致为8以上时,l=2~4的转矩常数k
t
超过l=1的转矩常数k
t
。
[0127]
另一方面,即使是在多个磁极20构成通常的排列的励磁12a中,由图21的l=1的标记可知,转矩常数k
t
随着极对数ρ的增加而单调地增加。而且,该转矩常数k
t
比l=2~4的转矩常数k
t
低。
[0128]
图22是表示轴向间隙电机1的励磁12与电枢11的间隙g为1.0mm、l=1~4、内半径
rr为80mm、外半径rm为100mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
[0129]
在多个磁极20构成海尔贝克阵列的励磁12b、12c、12d中,由图22的l=2~4的标记可知,转矩常数k
t
随着极对数ρ的增加而单调地增加。另外,在极对数ρ大致为8以上时,l=2~4的转矩常数k
t
超过l=1的转矩常数k
t
。
[0130]
另一方面,即使在多个磁极20构成通常的排列的励磁12a中,由图22的l=1的标记可知,转矩常数k
t
随着极对数ρ的增加而单调地增加。其中,该转矩常数k
t
比l=2~4的转矩常数k
t
低。
[0131]
图23是表示轴向间隙电机1的励磁12与电枢11的间隙g为1.5mm、l=1~4、内半径rr为80mm、外半径rm为100mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
[0132]
在多个磁极20构成海尔贝克阵列的励磁12b、12c、12d中,由图23的l=2~4的标记可知,在极对数ρ=55~75时,转矩常数k
t
取极大值。另外,在极对数ρ大致为8以上时,l=2~4的转矩常数k
t
超过l=1的转矩常数k
t
。
[0133]
另一方面,在多个磁极20构成通常的排列的励磁12a中,由图23的l=1的标记可知,在极对数ρ=65~85时,转矩常数k
t
取极大值。其中,其极大值比l=2~4的极大值低。
[0134]
图24是表示轴向间隙电机1的励磁12与电枢11的间隙g为2.0mm、l=1~4、内半径rr为80mm、外半径rm为100mm的模型的极对数ρ与转矩常数k
t
的关系的图表。
[0135]
在多个磁极20构成海尔贝克阵列的励磁12b、12c、12d中,由图24的l=2~4的标记可知,在极对数ρ=35~50时,转矩常数k
t
取极大值。另外,在极对数ρ大致为8以上时,l=2~4的转矩常数k
t
超过l=1的转矩常数k
t
。
[0136]
另一方面,在多个磁极20构成通常的排列的励磁12a中,由图24的l=1的标记可知,在极对数ρ=30~45时,转矩常数k
t
取极大值。其中,其极大值比l=2~4的极大值低。
[0137]
根据以上的图5至图24所示的图表,对励磁12的内半径rr与外半径rm之比vr进行考察。在图5至图8所示的模型中,比vr为0.8。在图9至图12所示的模型中,比vr为0.6。在图13至图16所示的模型中,比vr为0.4。在图17至图20所示的模型中,比vr为0.2。在图21至图24所示的模型中,比vr为0.8。因此,在图5至图24所示的模型中,比vr为0.2以上且0.8以下。另外,比vr优选为0.3以上且0.7以下,更优选为0.4以上且0.6以下。
[0138]
另外,根据图5至图24所示的图表,对极对数ρ与转矩常数k
t
的关系进行考察。在图5至图24所示的模型中,在极对数ρ大致为8以上时,l=2~4的转矩常数k
t
均超过l=1的转矩常数k
t
。
[0139]
图25是图21所示的图表的局部放大图。
[0140]
在该图25中,当极对数ρ为8以上时,更明确地确认到与l=2~4对应的标记和与l=1对应的标记之间带有显著性差异。
[0141]
如上所述,在比vr在上述范围内且极对数ρ为8以上时,能够充分地提高轴向间隙电机1的输出效率、即转矩t相对于轴向间隙电机1的输入电流i的比率。换言之,如果比vr及极对数ρ这双方为上述范围内,则通过构成海尔贝克阵列的磁极20的作用,能够实现磁通密度的充分的提高,因此能够充分地提高输出效率。
[0142]
此外,在比vr低于所述下限值的情况下,磁通密度的分布容易变得不均匀,存在输出效率下降的情况。在比vr超过所述上限值的情况下,由于磁极20的体积变得特别小,因此磁通密度容易降低,存在输出效率降低的情况。
[0143]
另外,在极对数ρ低于所述下限值的情况下,构成海尔贝克阵列的磁极20不能够充分作用,与磁极20构成通常的排列的情况相比,不能提高磁通密度。
[0144]
如上所述,本实施方式所涉及的轴向间隙电机1具备呈圆环状的励磁12、与励磁12相对地配置的电枢11。励磁12具有多个磁极20,多个磁极20在1个周期中包含在沿着旋转轴a的第一方向上被磁化的第一主磁极21b、21c、21d及在与第一方向相反的第二方向上被磁化的第二主磁极22b、22c、22d,并构成海尔贝克阵列。电枢11在沿着旋转轴a的方向上与励磁12相对地配置。而且,在该轴向间隙电机1中,励磁12的内半径rr与外半径rm之比vr为0.2以上且0.8以下。另外,在将海尔贝克阵列的周期数如上述那样设为极对数ρ时,在轴向间隙电机1中,极对数ρ为8以上。
[0145]
根据这样的结构,在图5至图24所示的图表中,l=2~4的转矩常数k
t
超过l=1的转矩常数k
t
,由此可见,能够得到实现了输出效率的提高的轴向间隙电机1。即,能够削减用于得到恒定的转矩t的输入电流i,因此能够削减与输入电流i的二次方成比例的消耗电力。另外,通过将比vr设定在所述范围内,能够实现轴向间隙电机1的小型化及轻量化。通过将这样的轴向间隙电机1搭载于例如移动机器人、电动汽车等,能够有助于续航距离、运转时间的延长、加减速性能的提高、制造成本的降低等。
[0146]
如图5至图24所示,优选励磁12的外半径rm为50mm以上且100mm以下。另外,励磁12与电枢11的距离(间隙g)优选为0.75mm以上且2.25mm以下。
[0147]
若励磁12的外半径rm及间隙g为所述范围内,则能够实现输出效率比较高且比较小型且容易制造的轴向间隙电机1。
[0148]
而且,励磁12与电枢11的距离(间隙g)优选为1.25mm以上且2.25mm以下。另外,极对数ρ优选为8以上且60以下,更优选为10以上且50以下,进一步优选为15以上且35以下。
[0149]
若间隙g及极对数ρ为所述范围内,则能够实现输出效率与制造容易度的平衡良好的轴向间隙电机1。另外,若极对数ρ过多,则励磁12的小型化变得困难。若极对数ρ为所述范围内,则轴向间隙电机1的小型化变得容易。
[0150]
另一方面,励磁12与电枢11的距离(间隙g)也可以为0.25mm以上且小于0.75mm。
[0151]
若间隙g为所述范围内,则能够实现输出效率特别高的轴向间隙电机1。
[0152]
另外,磁极20包含多个区段。其中,在上述的l=3的情况下,磁极20包含3个区段。另外,在上述的l=4的情况下,磁极20包含4个区段。这样,磁极20所包含的区段的数量优选为3或4。
[0153]
如果磁极20所包含的区段的数量为该范围内,则如图5至图24所示,由构成海尔贝克阵列的磁极20得到的高的磁通密度变得更显著。另外,能够防止因区段数显著增多而导致的弊端、例如制造容易度降低。因此,能够实现输出效率与制造容易度的平衡特别良好的轴向间隙电机1。
[0154]
另外,本实施方式所涉及的轴向间隙电机1具备2个励磁12。由此,轴向间隙电机1在2个励磁12与电枢11之间分别具有间隙。在这2个间隙中,能够利用励磁12与电枢11的相互作用,能够实现轴向间隙电机1的高转矩化。此外,轴向间隙电机也可以具备2个电枢和1个励磁。
[0155]
2.第二实施方式
[0156]
接下来,对第二实施方式所涉及的轴向间隙电机进行说明。
[0157]
图26是表示第二实施方式所涉及的轴向间隙电机的概略结构的剖视图。
[0158]
以下,对第二实施方式进行说明,但在以下的说明中,以与第一实施方式的不同点为中心进行说明,对于相同的事项省略其说明。此外,在以下的各图中,对与第一实施方式相同的结构标注相同的附图标记。
[0159]
上述的第一实施方式具备作为2个励磁12的第一励磁12a及第二励磁12b、以及1个电枢11,与此相对,本实施方式具备作为2个励磁12的第一励磁12a及第二励磁12b、以及作为2个电枢11的第一电枢11a及第二电枢11b。
[0160]
即,如图26所示,本实施方式所涉及的轴向间隙电机1a具备轴10、第一电枢11a、第一励磁12a、背轭13、第二励磁12b及第二电枢11b。因此,轴向间隙电机1a中,第一励磁12a及第二励磁12b和背轭13构成1个转子,第一电枢11a及第二电枢11b分别构成定子。而且,在第一电枢11a与第二电枢11b之间配置有转子。
[0161]
第一电枢11a及第二电枢11b具有彼此相同的结构。即,第一电枢11a具有多个铁芯14a及多个线圈15a。第二电枢11b具有与多个铁芯14a及多个线圈15a相同的多个铁芯14b及多个线圈15b。第一电枢11a在沿着旋转轴a的方向上与第一励磁12a相对。同样地,第二电枢11b在沿着旋转轴a的方向上与第二励磁12b相对。
[0162]
如上所述,本实施方式所涉及的轴向间隙电机1a分别具备2个励磁12及电枢11。由此,轴向间隙电机1a在2个励磁12与2个电枢11之间分别具有间隙。在这2个间隙中,能够利用励磁12与电枢11的相互作用,能够实现轴向间隙电机1a的高转矩化。
[0163]
在以上这样的第二实施方式中,也能够得到与第一实施方式相同的效果。
[0164]
3.第三实施方式
[0165]
接下来,对第三实施方式所涉及的径向间隙电机进行说明。
[0166]
图27是表示第三实施方式所涉及的径向间隙电机的概略结构的剖视图。图28是表示第三实施方式所涉及的径向间隙电机的概略结构的俯视图。图29至图32分别是用于说明从沿着旋转轴的方向观察图28所示的励磁时励磁的磁化方向的示意图。
[0167]
以下,对第三实施方式进行说明,但在以下的说明中,以与第一实施方式的不同点为中心进行说明,对于相同的事项省略其说明。此外,在以下的各图中,对与第一实施方式相同的结构标注相同的附图标记。
[0168]
上述的第一、第二实施方式为轴向间隙电机1、1a,与此相对,本实施方式是径向间隙电机1b。
[0169]
如图27所示,第三实施方式所涉及的径向间隙电机1b具备轴60、电枢61、励磁62及背轭63。在径向间隙电机1b中,在与旋转轴a正交的方向、即轴60的半径方向上,励磁62与电枢61相对。背轭63配置于与励磁62的电枢61相反的一侧。
[0170]
电枢61与励磁62之间的间隙设置在与旋转轴a正交的方向上。在图27所示的例子中,呈大致圆柱状的电枢61配置在呈圆筒状(圆环状)的励磁62的内侧。其中,电枢61也可以配置在励磁62的外侧。在径向间隙电机1b中,电枢61为转子,励磁62为定子。此外,电枢61也可以是定子,励磁62也可以是转子。轴60相当于转子的旋转轴。
[0171]
如图28所示,电枢61具有铁芯64及多个线圈67。铁芯64具有呈圆筒状的轭部65、从轭部65的侧面向外侧突出的多个肋部66。铁芯64例如由软磁性体构成。各肋部66沿着旋转轴a延伸。各肋部66例如由在沿着旋转轴a的方向上层叠的多个板的层叠体或软磁性粉末的
压粉体构成。各线圈67具有卷绕于肋部66的绕组。肋部66及线圈67的数量根据流过线圈67的电流的相数来设定,但在本实施方式中,为18。在该情况下,肋部66及线圈67以相对于旋转轴a具有18次旋转对称性的方式沿着以旋转轴a为中心的圆周等间隔地配置。
[0172]
励磁62具有沿着以旋转轴a为中心的圆周排列的多个磁极68。磁极68例如是永久磁铁。多个磁极68在排列方向具有周期性不同的磁化方向。具体而言,多个磁极68每1个周期包含在与旋转轴a正交的第三方向上被磁化的第三主磁极和在与第三方向相反的第四方向上被磁化的第四主磁极。因此,图28所示的励磁62具有6个周期的磁极68。
[0173]
如图29所示,若将排列方向上的每半个周期的磁极68的数量设为l,则l=1的励磁62a每1个周期具有2个磁极68。一个磁极68包括第三主磁极68a,另一个磁极68包括第四主磁极69a。因此,励磁62a所具有的多个磁极68分别在与旋转轴a正交的第三方向或第四方向上被磁化。
[0174]
如图30所示,l=2的励磁62b每1个周期具有2个磁极68。一个磁极68包括第三主磁极68b及辅助磁极70b作为2个区段。另一个磁极68包括第四主磁极69b及辅助磁极71b作为2个区段。从沿着旋转轴a的方向观察,励磁62b的各区段具有与相邻的区段相差90
°
的磁化方向。另外,励磁62b的各区段在排列方向上依次具有以每次旋转90
°
的方式变化的磁化方向。
[0175]
如图31所示,l=3的励磁62c每1个周期具有2个磁极68。一个磁极68包括第三主磁极68c、辅助磁极70c及辅助磁极71c作为3个区段。另一个磁极68包括第四主磁极69c、辅助磁极72c及辅助磁极73c作为3个区段。从沿着旋转轴a的方向观察,励磁62c的各区段具有与相邻的区段相差60
°
的磁化方向。另外,励磁62c的各区段在排列方向上依次具有以每次旋转60
°
的方式变化的磁化方向。
[0176]
如图32所示,l=4的励磁62d每1个周期具有2个磁极68。一个磁极68包括第三主磁极68d、辅助磁极70d、辅助磁极71d及辅助磁极72d作为4个区段。另一个磁极68包括第四主磁极69d、辅助磁极73d、辅助磁极74d及辅助磁极75d作为4个区段。从沿着旋转轴a的方向观察,励磁62d的各区段具有与相邻的区段相差45
°
的磁化方向。另外,励磁62d的各区段在排列方向上依次具有以每次旋转45
°
的方式变化的磁化方向。
[0177]
励磁62b、62c、62d分别具有的多个磁极68构成海尔贝克阵列。这样,l≥2的励磁62所具有的多个磁极68构成海尔贝克阵列。在具有海尔贝克阵列的径向间隙电机1b中,电枢61配置在海尔贝克阵列的强磁场侧。另一方面,背轭63配置在海尔贝克阵列的弱磁场侧。
[0178]
具有构成海尔贝克阵列的磁极68的径向间隙电机1b能够增大励磁62的表面上的磁通密度,能够提高转矩。特别是,在l为3以上的情况下,能够使排列方向上的磁通密度的变化平滑,能够进一步提高转矩。
[0179]
在以上这样的径向间隙电机1b中,也能够得到与上述的轴向间隙电机1、1a相同的效果。
[0180]
即,径向间隙电机1b具备呈圆环状的励磁62、与励磁62相对地配置的电枢61。励磁62具有多个磁极68,多个磁极68在1个周期包含在与旋转轴a正交的第三方向上被磁化的第三主磁极68b、68c、68d及在与第三方向相反的第四方向上被磁化的第四主磁极69b、69c、69d,并构成海尔贝克阵列。电枢61在与旋转轴a正交的方向上与励磁62相对地配置。而且,在该径向间隙电机1b中,在将海尔贝克阵列的周期数设为极对数ρ时,极对数ρ为8以上。
[0181]
根据这样的结构,能够得到实现了输出效率的提高的径向间隙电机1b。即,由于能
够削减用于得到恒定的转矩的输入电流,因此能够削减与输入电流的二次方成比例的消耗电力。因此,通过将径向间隙电机1b搭载于例如移动机器人、电动汽车等,能够有助于续航距离、运转时间的延长、加减速性能的提高、制造成本的降低等。
[0182]
图33是表示径向间隙电机1b的励磁62与电枢61的间隙为1.0mm、l=1~4的模型的极对数ρ与励磁62的表面磁通密度的基波分量pb
1,l
的关系的图表。
[0183]
在多个磁极68构成海尔贝克阵列的励磁62b、62c、62d中,由图33的l=2~4的标记可知,在极对数ρ=30~65时,励磁62的表面磁通密度的基波分量pb
1,l
取极大值。
[0184]
另一方面,在多个磁极68不构成海尔贝克阵列、即构成通常的排列的励磁62a中,由图33的l=1的标记可知,在极对数ρ=30~65时,励磁62的表面磁通密度的基波分量pb
1,l
取极大值。其中,其极大值比l=2~4的值低。
[0185]
在此,根据图33所示的图表,对极对数ρ与励磁62的表面磁通密度的基波分量pb
1,l
的关系进行考察。在图33所示的模型中,在极对数ρ大致为8以上时,l=2~4的表面磁通密度的基波分量pb
1,l
超过l=1的表面磁通密度的基波分量pb
1,l
。
[0186]
因此,在多个磁极68构成海尔贝克阵列,极对数ρ为8以上时,能够充分提高径向间隙电机1b的输出效率、即转矩相对于输入电流的比率。
[0187]
此外,在极对数ρ低于所述下限值的情况下,构成海尔贝克阵列的磁极68不能充分作用,与磁极68构成通常的排列的情况相比,不能提高磁通密度。
[0188]
另外,径向间隙电机1b的极对数ρ优选为8以上且80以下,更优选为10以上且70以下,进一步优选为30以上且65以下。
[0189]
若径向间隙电机1b的极对数ρ为所述范围内,则能够实现输出效率特别良好的径向间隙电机1b。
[0190]
而且,在径向间隙电机1b中,励磁62与电枢61的距离(间隙)优选为0.5mm以上且1.5mm以下,更优选为0.8mm以上且1.2mm以下。
[0191]
若间隙为所述范围内,则能够实现输出效率和制造容易度的平衡良好的径向间隙电机1b。
[0192]
4.第四实施方式
[0193]
接下来,对第四实施方式所涉及的机器人进行说明。
[0194]
图34是表示第四实施方式所涉及的机器人的立体图。图35是图34所示的机器人的概略图。
[0195]
图34所示的机器人100例如在各种工件(对象物)的输送、组装、检查等各个作业中使用。
[0196]
如图34及图35所示,机器人100具有基台400、机器人臂1000、驱动部401~406。
[0197]
图34及图35所示的基台400载置于水平的地板101上。此外,基台400也可以不载置于地板101,而载置于墙壁、天花板、架台等上。
[0198]
图34及图35所示的机器人臂1000具备第一臂110、第二臂120、第三臂130、第四臂140、第五臂150及第六臂160。在第六臂160的末端能够可装卸地安装未图示的末端执行器,能够利用该末端执行器把持工件等。作为利用末端执行器把持等的工件,没有特别限定,例如,可举出电子部件、电子设备等。此外,在本说明书中,将以第六臂160为基准时的基台400侧设为“基端侧”,将以基台400为基准时的第六臂160侧设为“末端侧”。
[0199]
作为末端执行器,没有特别限定,可举出把持工件的机械手、吸附工件的吸附头等。
[0200]
机器人100是从基端侧朝向末端侧依次连结有基台400、第一臂110、第二臂120、第三臂130、第四臂140、第五臂150、第六臂160的单臂的6轴垂直多关节机器人。以下,也将第一臂110、第二臂120、第三臂130、第四臂140、第五臂150及第六臂160分别称为“臂”。第一臂110~第六臂160的长度分别没有特别限定,能够适当设定。此外,机器人臂1000所具有的臂的数量可以是1~5根或7根以上。另外,机器人100可以是scara(selective compliance assembly robot arm)机器人,也可以是具备2个或其以上的机器人臂1000的双臂机器人。
[0201]
基台400与第一臂110经由关节171连结。第一臂110能够相对于基台400以与铅垂轴平行的第一转动轴o1为转动中心转动。第一臂110通过具有电机401m及未图示的减速机的驱动部401的驱动而转动。电机401m产生使第一臂110转动的推力。
[0202]
第一臂110与第二臂120经由关节172连结。第二臂120能够相对于第一臂110以与水平面平行的第二转动轴o2为转动中心转动。第二臂120通过具有电机402m及未图示的减速机的驱动部402的驱动而转动。电机402m产生使第二臂120转动的推力。
[0203]
第二臂120与第三臂130经由关节173连结。第三臂130能够相对于第二臂120以与水平面平行的第三转动轴o3为转动中心而转动。第三臂130通过具有电机403m及未图示的减速机的驱动部403的驱动而转动。电机403m产生使第三臂130转动的推力。
[0204]
第三臂130与第四臂140经由关节174连结。第四臂140能够相对于第三臂130以与第三臂130的中心轴平行的第四转动轴o4为转动中心而转动。第四臂140通过具有电机404m及未图示的减速机的驱动部404的驱动而转动。电机404m产生使第四臂140转动的推力。
[0205]
第四臂140与第五臂150经由关节175连结。第五臂150能够相对于第四臂140以与第四臂140的中心轴正交的第五转动轴o5为转动中心而转动。第五臂150通过具有电机405m及未图示的减速机的驱动部405的驱动而转动。电机405m产生使第五臂150转动的推力。
[0206]
第五臂150与第六臂160经由关节176连结。第六臂160能够相对于第五臂150以与第五臂150的末端部的中心轴平行的第六转动轴o6为转动中心而转动。第六臂160通过具有电机406m及未图示的减速机的驱动部406的驱动而转动。电机406m产生使第六臂160转动的推力。
[0207]
另外,在驱动部401~406设置有未图示的角度传感器。作为这些角度传感器,例如,可举出旋转编码器等各种编码器。角度传感器检测驱动部401~406的电机401m~406m或减速机的输出轴的转动角度。
[0208]
驱动部401~406及角度传感器分别与未图示的机器人控制装置电连接。机器人控制装置独立地控制驱动部401~406的动作。
[0209]
如上所述,机器人100具备第一臂110~第六臂160和使第一臂110~第六臂160移动的关节171~176。而且,在关节171~176中的至少一个设置有海尔贝克阵列电机。即,上述的电机401m~406m中的至少一个为海尔贝克阵列电机。海尔贝克阵列电机是指上述的轴向间隙电机1、1a或径向间隙电机1b。
[0210]
如上述那样,海尔贝克阵列电机的输出效率高。因此,在具备海尔贝克阵列电机的机器人100中,能够实现消耗电力的削减。另外,海尔贝克阵列电机容易小型化、轻量化,因此容易提高机器人100的设计自由度。
[0211]
此外,不需要在关节171~176的全部设置海尔贝克阵列电机,也可以在一部分设置有非海尔贝克阵列电机。如上所述,在机器人100具备经由第一臂110串联配置的关节171(第一关节)及关节172(第二关节)时,也可以在关节171设置有非海尔贝克阵列电机,在关节172设置有海尔贝克阵列电机。非海尔贝克阵列电机是指具备不构成海尔贝克阵列的多个磁极的电机。此外,关节171位于第一臂110的基端侧,关节172位于第一臂110的末端侧。
[0212]
根据这样的结构,将与非海尔贝克阵列电机相比容易小型化的海尔贝克阵列电机配置于第一臂110的末端侧,将非海尔贝克阵列电机配置于第一臂110的基端侧。由此,能够实现第一臂110的末端侧的轻量化。其结果,能够实现机器人100的消耗电力的进一步削减,另外,能够进一步提高机器人100的运动性能。
[0213]
此外,设置海尔贝克阵列电机、非海尔贝克阵列电机的关节也可以是关节173~176。
[0214]
以上,基于图示的实施方式对本发明的轴向间隙电机、径向间隙电机及机器人进行了说明,但本发明不限定于此。
[0215]
例如,本发明的轴向间隙电机、径向间隙电机及机器人可以分别将所述实施方式的各部置换为具有相同的功能的任意的构成物,也可以对所述实施方式附加任意的构成物。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。