技术特征:
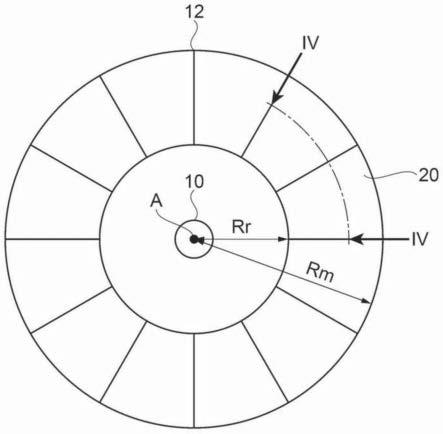
1.一种轴向间隙电机,其特征在于,具备:励磁,呈圆环状,并具有构成海尔贝克阵列的多个磁极,所述多个磁极在1个周期中包含第一主磁极及第二主磁极,所述第一主磁极在沿着旋转轴的第一方向上被磁化,所述第二主磁极在与所述第一方向相反的第二方向上被磁化;以及电枢,在沿着所述旋转轴的方向上与所述励磁相对地配置,所述励磁的内半径与外半径之比为0.2以上且0.8以下,在将所述海尔贝克阵列的周期数设为极对数时,所述极对数为8以上。2.根据权利要求1所述的轴向间隙电机,其特征在于,所述励磁的外半径为50mm以上且100mm以下,所述励磁与所述电枢的距离为0.75mm以上且2.25mm以下。3.根据权利要求2所述的轴向间隙电机,其特征在于,所述励磁与所述电枢的距离为1.25mm以上且2.25mm以下,所述极对数为8以上且60以下。4.根据权利要求1所述的轴向间隙电机,其特征在于,所述励磁与所述电枢的距离为0.25mm以上且小于0.75mm。5.根据权利要求1至4中任一项所述的轴向间隙电机,其特征在于,所述磁极包含多个区段,所述磁极所包含的所述区段的数量为3或4。6.根据权利要求1至4中任一项所述的轴向间隙电机,其特征在于,所述轴向间隙电机具备的所述励磁和所述电枢中的至少一方的数量为2。7.一种径向间隙电机,其特征在于,具备:励磁,呈圆环状,并具有构成海尔贝克阵列的多个磁极,所述多个磁极在1个周期中包含第三主磁极及第四主磁极,所述第三主磁极在与旋转轴正交的第三方向上被磁化,所述第四主磁极在与所述第三方向相反的第四方向上被磁化;以及电枢,在与所述旋转轴正交的方向上与所述励磁相对地配置,在将所述海尔贝克阵列的周期数设为极对数时,所述极对数为8以上。8.根据权利要求7所述的径向间隙电机,其特征在于,所述极对数为8以上且80以下。9.根据权利要求7或8所述的径向间隙电机,其特征在于,所述励磁与所述电枢的距离为0.5mm以上且1.5mm以下。10.一种机器人,其特征在于,具备臂和使所述臂移动的关节,在所述关节设置有海尔贝克阵列电机,所述海尔贝克阵列电机是权利要求1至6中任一项所述的轴向间隙电机或权利要求7至9中任一项所述的径向间隙电机。11.根据权利要求10所述的机器人,其特征在于,所述机器人具备第一关节及第二关节作为经由所述臂串联配置的多个所述关节,所述第一关节位于所述臂的基端侧,所述第二关节位于所述臂的末端侧,在所述第一关节设置有非海尔贝克阵列电机,
在所述第二关节设置有所述海尔贝克阵列电机,所述非海尔贝克阵列电机是具备未构成海尔贝克阵列的多个磁极的电机。
技术总结
一种轴向间隙电机、径向间隙电机及机器人,能够实现输出效率的提高。轴向间隙电机的特征在于,具备:励磁,呈圆环状,并具有构成海尔贝克阵列的多个磁极,所述多个磁极在1个周期中包含第一主磁极及第二主磁极,所述第一主磁极在沿着旋转轴的第一方向上被磁化,所述第二主磁极在与所述第一方向相反的第二方向上被磁化;以及电枢,在沿着所述旋转轴的方向上与所述励磁相对地配置,所述励磁的内半径与外半径之比为0.2以上且0.8以下,在将所述海尔贝克阵列的周期数设为极对数时,所述极对数为8以上。以上。以上。
技术研发人员:儿嶋长子 冲田太志
受保护的技术使用者:精工爱普生株式会社
技术研发日:2022.05.18
技术公布日:2022/11/22
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。