1.本发明涉及包括行驶单元和推车单元的移动体系统。
背景技术:
2.近年来,已经使用自动车辆设计了用于运输例如行李等的物品的系统。日本未审查专利申请公开第2019-131039号(jp 2019-131039 a)公开了一种执行自主行驶的车辆,该车辆包括具有前轮的前部分、具有后轮的尾部分和通过连接在前部分与尾部分之间而使前部分和尾部分一体化的装载部分。在前部分和尾部分停止的状态下,装载部分配置为在与车辆的前进方向相交的方向上能够从车辆分离并且能够连接到车辆。
技术实现要素:
3.在jp 2019-131039 a中公开的系统中,当服务器装置从外部接收到车辆分配请求时,服务器装置确定要派遣的自主行驶车辆,并响应于车辆分配请求生成操作指令。期望设置有具有自主驾驶功能的移动体的系统能够在各种场景中提供有用的服务。
4.因此,本发明的目的是提供新的移动体系统。
5.为了解决上述问题,本发明的一个方面的移动体系统是包括具有自主行驶功能的行驶单元和具有用于装载物体的收容部分的推车单元的移动体,所述移动体系统包括:检测单元以及控制单元,所述检测单元检测放置在所述收容部分上的物体的量;所述控制单元基于由所述检测单元检测到的所述物体的量来确定所述行驶单元的操作。
6.应当注意,上述部件的任意组合,以及在方法、装置、系统、计算机程序、其中计算机程序可读的记录介质、以及数据结构等之间转换的本发明的表达,也有效地作为本发明的一个方面。
附图说明
7.下面将参照附图描述本发明的示例性实施例的特征、优点和技术以及工业意义,其中相同的标记表示相同的元素,并且其中:图1为示出实施例的移动体系统的概要的图;图2为示出实施例的移动体的透视图的图;图3为示出行驶单元与推车单元彼此分离的状态的图;图4为示出本体部分中设置的门的示例的图;图5为用于说明移动体的配置的图;图6为示出移动体系统的功能框的图;图7为示出推车单元的示例的图;图8为示出服务器装置中的处理的流程图的图;图9为示出收容部分的一个示例的图;图10为示出收容部分的另一示例的图;
图11为示出推车单元的示例的图;以及图12为示出服务器装置中的处理的流程图的图。
具体实施方式
8.图1为示出实施例的移动体系统1的概要的图。移动体系统1包括行驶单元12、其上可放置物体的推车单元14、以及服务器装置6。行驶单元12具有自主行驶功能,而推车单元14不具有自主行驶功能。行驶单元12和推车单元14中的每一者具有无线通信功能,并且经由作为基站的无线站4经由网络2(例如因特网等)可通信地连接到服务器装置6。行驶单元12和推车单元14可以经由网络2彼此通信。然而,可以是能够不经过网络2而直接彼此通信。
9.在移动体系统1中,行驶单元12和推车单元14配置为是可连接和可分离的,并且行驶单元12与推车单元14连接以形成移动体10。具有自主行驶功能的行驶单元12本身可称为移动体。
10.由于行驶单元12和推车单元14配置为是可连接和可分离的,所以当推车单元14被牵引到目的地时,行驶单元12可以从推车单元14分离并执行另一任务。例如,如果另一任务是将另一推车单元14牵引到另一目的地,则行驶单元12移动到布置有另一推车单元14的位置,连接到该另一推车单元14,将该另一推车单元14牵引到另一目的地,以及从该另一推车单元14脱离。通过将行驶单元12和推车单元14配置成以这种方式可连接和可分离,行驶单元12能一个接一个地执行与不同的推车单元14有关的任务。
11.脱离的推车单元14在该位置处提供服务。在本实施例中,推车单元14例如提供用于销售产品的商店服务或用于回收垃圾的垃圾回收服务。稍后将描述由推车单元14提供的各种服务。当服务完成时,推车单元14可以连接到行驶单元12,并且被行驶单元12牵引到特定位置。在移动体系统1中,构成移动体10的行驶单元12和推车单元14的组合不是固定的,并且行驶单元12和推车单元14的组合可以由服务器装置6适当地确定。
12.服务器装置6管理多个行驶单元12和多个推车单元14的位置和状态。行驶单元12的状态包括指示是否正在执行任务的状态,而推车单元14的状态包括指示是否正在提供服务的状态。服务器装置6基于行驶单元12和推车单元14的位置和状态来确定每个行驶单元12的操作(任务)。行驶单元12基于从服务器装置6发送的操作指令进行操作。
13.图2示出了实施例的移动体10的透视图。移动体10通过将行驶单元12连接到推车单元14来构成。推车单元14具有用于装载物体的收容部分8。移动体10的总长度可以是大约2m(米)至3m,总宽度可以是大约0.5m至1.8m,并且总高度可以是大约1.5m至2.5m。
14.图3示出了行驶单元12与推车单元14彼此分离的状态。推车单元14包括形成收容部分8的本体部分40。收容部分8由设置有前轮42和后轮44的基部分40a、与基部分40a对向设置的天花板部分40b、前壁部分40c以及后壁部分40d限定,并且收容部分8配置成为沿车辆宽度方向延伸的空间。在前壁部分40c和后壁部分40d上形成有彼此对向的多个突条40e,使得可以附接搁板等。例如,通过在突条40e上布置搁板并且将产品放置在搁板上,推车单元14可以用作提供商店服务的移动商店。在推车单元14从行驶单元12分离的状态下,推车单元14的腿部分46与地面接触,使得推车单元14是不可移动的,并且推车单元14的位置是固定的。
15.可以在收容部分8的两个侧表面上设置用于分隔空间的打开/关闭门。图4示出了
在本体部分40中设置的门60的示例。门60可以是翻转门,在该翻转门中,在天花板部分40b的两个侧部上设置有铰链。通过关闭门60,可以将收容部分8与外部空间分隔。因此,例如,可以防止在移动时放置在收容部分8中的物体掉出。另外,当提供服务时,可以通过打开门60来创建遮阳帘。门60可以全部或部分地由透明材料或半透明材料制成,使得能够在关闭状态下从外部看到内部。
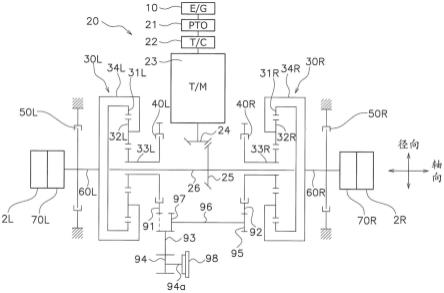
16.图5为用于说明移动体10的配置的图。行驶单元12包括车轮20、本体部分22、物体检测传感器24、连接装置26、处理装置30、通信单元32、驱动装置34和电源装置36。推车单元14具有本体部分40、前轮42、后轮44、腿部分46、被连接部分48、电源装置50、处理装置52、通信单元54和物体传感器56。
17.在行驶单元12中,设置有一对车轮20,其中一个车轮设置在左侧,另一车轮设置在右侧,并且这些车轮由本体部分22可旋转地支撑。一对车轮20中的每个车轮上设置有驱动装置34。驱动装置34包括电机,并且响应于由处理装置30生成的驱动指令而使车轮20旋转。由于一对车轮20彼此独立地旋转,因此由于一对车轮20的旋转速度的差异,行驶单元12能够左右弯曲。除了设置有一对车轮20之外,本体部分22还可以设置有一个或多个辅助车轮(未图示)。
18.本体部分22包括车体框架和覆盖内部结构的盖。物体检测传感器24设置在本体部分22上,并检测在前进方向上的物体。物体检测传感器24可以是相机、毫米波雷达、红外激光器或声波传感器等,或者可以是它们的组合。物体检测传感器24不仅可以设置在本体部分22的前部分处,而且也可以设置在本体部分22的各种位置处,以检测在后方或横向方向上的物体。物体检测传感器24将检测结果供应给处理装置30。
19.连接装置26设置在本体部分22的后部分处,并且连接到推车单元14的被连接部分48(参见图3)。处理装置30在行驶单元12与推车单元14彼此接近的状态下控制车轮20的驱动以将连接装置26与被连接部分48连接,并且操作锁定机构以将连接装置26与被连接部分48连接。当连接装置26耦合到被连接部分48时,连接装置26向处理装置30发送指示连接完成的信号。用于将连接装置26与被连接部分48连接的锁定机构可以具有,例如具有钩形钩部分并且将连接装置26与被连接部分48机械地连接的结构。然而,锁定机构也可以具有将连接装置26与被连接部分48电磁地连接的结构。处理装置30通过释放锁定机构来分离连接装置26与被连接部分48。
20.电源装置36是可再充电电池,并向安装在行驶单元12上的每个构造供应电力。电源装置36可以是能够向推车单元14的电源装置50传输电力和从推车单元14的电源装置50接收电力。处理装置30监视电源装置36的剩余电力量。
21.处理装置30控制行驶单元12的自主行驶。处理装置30基于物体检测传感器24的检测结果和行驶单元12的位置信息来驱动驱动装置34,并且实现行驶单元12的自主行驶。通信单元32连接到网络2并与服务器装置6和/或推车单元14通信。当行驶单元12与推车单元14之间的距离短时,行驶单元12的通信单元32与推车单元14的通信单元54可以不经过网络2而直接彼此通信。
22.在推车单元14中,一对前轮42和一对后轮44由本体部分40的基部分40a可旋转地支撑。推车单元14不具有用于驱动前轮42和后轮44的驱动装置。被连接部分48设置在本体部分40的前部分中,并且连接到行驶单元12的连接装置26。当连接装置26与被连接部分48
连接时,被连接部分48可以向处理装置52发送指示连接完成的信号。
23.一对腿部分46设置在本体部分40的前部分上,并且配置成能够相对于地面前进和后退。当腿部分46前进到地面并与地面接触时,腿部分46用作限制推车单元14的移动的止动件。因此,在推车单元14从行驶单元12分离的状态下,腿部分46前进到地面并与地面接触以充当止动件。在另一方面,当推车单元14连接到行驶单元12时,腿部分46后退并且不与地面接触。例如,当处理装置52从被连接部分48获取到指示连接完成的信号时,腿部分46可以后退并从地面分离。
24.电源装置50使用氢、汽油、电力等中的至少一者作为电力源,并且向安装在推车单元14上的每个构造供应电力。图3示出了被插入到处于本体部分40的前部分中的三个槽中的三个氢罐。处理装置52监视电源装置50的剩余电力量。
25.本实施例的推车单元14通过将物体放置在收容部分8上而使用。如稍后将描述的,要装载的物体可以是取决于要提供的服务的各种类型的物体,并且物体传感器56获取用于检测要装载到收容部分8上的物体的量的信息。例如,物体传感器56可以是重量传感器并且可以测量放置在收容部分8上的物体的重量。此外,物体传感器56可以是图像传感器,并且可以获取放置在收容部分8上的物体的图像。以这种方式,物体传感器56获取用于检测存在于收容部分8中的物体的量的信息,并将该信息供应给处理装置52。
26.通信单元54连接到网络2并与服务器装置6和/或行驶单元12通信。当行驶单元12与推车单元14之间的距离短时,推车单元14的通信单元54与行驶单元12的通信单元32可以不经过网络2而直接彼此通信。
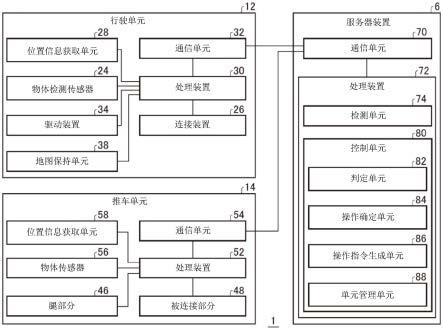
27.图6为示出移动体系统1的功能框的图。本实施例的移动体系统1包括行驶单元12、推车单元14和服务器装置6。虽然在图6中示出了一个行驶单元12和一个推车单元14,但是在移动体系统1中可以存在多个行驶单元12和多个推车单元14。
28.在行驶单元12中,位置信息获取单元28通过使用卫星定位系统来获取行驶单元12的当前位置信息,并将所获取的当前位置信息供应给处理装置30。例如,位置信息获取单元28可以是全球定位系统(global positioning system,gps)接收机。处理装置30将行驶单元12的当前位置信息与行驶单元12的识别信息(行驶单元id)一起从通信单元32发送到服务器装置6。优选地,周期性地发送当前位置信息。
29.地图保持单元38保持指示道路位置的地图信息。处理装置30基于从服务器装置6发送的操作指令来控制行驶单元12中的每个构造。操作指令至少包括指示目的地(目的地)的信息。处理装置30通过使用在地图保持单元38中保持的地图信息和从位置信息获取单元28供应的当前位置信息来导出朝向操作指令中包括的目的地的行驶路线。处理装置30控制驱动装置34以沿着所导出的行驶路线行驶。行驶路线可以由服务器装置6导出并被包括在操作指令中。在向目的地行驶时,处理装置30基于由物体检测传感器24测得的检测数据获取关于在行驶单元12周围存在的物体的信息。处理装置30确定前进方向和行驶速度以避免与周围物体碰撞,并驱动驱动装置34。
30.在推车单元14中,位置信息获取单元58通过使用卫星定位系统来获取推车单元14的当前位置信息,并将所获取的当前位置信息供应给处理装置52。位置信息获取单元58可以是gps接收机。处理装置52将推车单元14的当前位置信息与推车单元14的识别信息(推车单元id)一起从通信单元54发送到服务器装置6。优选地,周期性地发送当前位置信息。
31.服务器装置6包括通信单元70和处理装置72,处理装置72具有检测单元74和控制单元80。控制单元80包括判定单元82、操作确定单元84、操作指令生成单元86和单元管理单元88。
32.通信单元70从行驶单元12和推车单元14接收当前位置信息。单元管理单元88基于从行驶单元12和推车单元14发送的当前位置信息来管理行驶单元12和推车单元14的当前位置。
33.在图6中,被描述为执行各种处理的功能块的每个元件可以在硬件方面通过电路块、内存和其他lsi构成,并且在软件方面通过加载到内存中的程序来实现。因此,本领域技术人员可以理解,这些功能块可以以例如仅硬件、仅软件或其组合等的各种形式实现,并且本发明不限于它们中的任何形式。第一实施例
34.在第一实施例中,推车单元14提供商店服务。图7示出了用于销售产品的推车单元14的示例。行驶单元12将推车单元14牵引到从服务器装置6发送的操作指令中包括的销售位置,并在销售位置处使推车单元14脱离。在推车单元14从行驶单元12分离之前,处理装置52使腿部分46与地面接触以限制推车单元14的移动。推车单元14可以布置在人们可以轻易聚集的地方,例如,办公区的角落中。
35.在图7中所示的推车单元14中,作为产品的花被放置在收容部分8中设置的产品架上。图7示出了销售开始之前的状态。收容部分8可以设置有用于维持花的新鲜度的温度调节功能。在本体部分40中设置有电子支付终端(未图示),用户可以通过进行电子支付来购买产品并将其带回家。在本示例中,示出了仅一个推车单元14。然而,可以在同一空间中并排布置有承载各种类型产品的推车单元14。安装在推车单元14上的产品除了是花以外,也可以是例如衣服、食品、饮料和书籍等。通过在同一空间中布置承载各种类型产品的推车单元14,可以构建临时购物中心,并且用户可以搜索和购买他们想要的东西。
36.物体传感器56获取用于检测在收容部分8中放置的物体(商品)的量的信息。在图7中所示的示例中,物体传感器56是获取通过拍摄收容部分8的内部而获取的图像信息的图像传感器。然而,物体传感器56可以是获取在产品架上放置的物体(产品)的重量信息的重量传感器。由物体传感器56获取的传感器信息被供应给处理装置52,并且在提供商店服务的同时,处理装置52周期性地将由物体传感器56获取的传感器信息与推车单元id一起从通信单元54发送到服务器装置6。如果处理装置52具有检测产品的剩余量已经改变,即,放置在产品货架上的产品已经被用户带回的功能,则在该时刻,可以将由物体传感器56获取的传感器信息从通信单元54发送到服务器装置6。
37.当由用户购买了推车单元14中的所有产品时,推车单元14不具有存在于销售位置的意义。因此,当产品的剩余量低时,优选的是将推车单元14从销售位置移开,并且替代地,将载满产品的另一推车单元14布置在销售位置处。
38.图8示出了服务器装置6中的处理的流程图。在服务器装置6中,通信单元70接收由推车单元14中的物体传感器56获取的传感器信息(s10)。检测单元74根据由物体传感器56获取的传感器信息,检测放置在收容部分8上的物体的量(剩余量)(s12)。要检测的物体的量可以是物体的数量或物体的重量。
39.将描述由物体传感器56获取的传感器信息是通过拍摄收容部分8而获取的图像信
息的情况。检测单元74具有图像识别功能,并从图像信息中检测产品的数量。例如,检测单元74从通过在图7中所示的销售开始时拍摄收容部分8而获取的图像信息中检测到产品的数量是28个。
40.判定单元82判定由检测单元74检测到的产品的量是否小于预定量(s14)。这里,充当阈值的预定量可以是例如6个。在销售开始时,在收容部分8上装载了28个产品,因此,判定单元82判定在销售开始时产品的量不小于预定量(s14中为“否”)。
41.图9示出了收容部分8的状态的一个示例。在本示例中,在销售开始之后,多个产品被购买并且被购买的产品被从产品架移除。检测单元74从通过拍摄图9中所示的收容部分8而获取的图像信息中检测到剩余产品的数量是12个(s12)。此时,判定部分82判定产品的量不小于预定量(s14中为“否”)。
42.图10示出了收容部分8的状态的另一示例。在本示例中,从图9中所示的状态进一步有多个产品被购买。检测单元74从通过拍摄图10中所示的收容部分8而获取的图像信息中检测到剩余产品的数量是5个(s12)。此时,判定部分82判定产品的量小于预定量(6个产品)(s14中为“是”)。
43.操作确定单元84在当产品的剩余量降到低于预定量时,确定行驶单元12的操作(s16)。这里,操作确定单元84确定将其中产品的剩余量小于预定量的推车单元14回收的操作。该回收操作是这样的操作:在该操作中,行驶单元12移动到推车单元14的位置,连接到推车单元14,并且将推车单元14牵引到预定回收地点。作为牵引目的地的预定回收地点可以是例如用于补充产品的地点。
44.单元管理单元88从存在于推车单元14周围的多个行驶单元12当中识别未被分配操作(任务)的行驶单元12(s18)。单元管理单元88向操作指令生成单元86通知识别到的行驶单元12的行驶单元id和作为回收目标的推车单元14的当前位置信息。操作指令生成单元86生成移动到推车单元14的位置、与推车单元14连接、并将推车单元14牵引到预定回收地点的指令。操作指令生成单元86将包括作为回收目标的推车单元14的当前位置信息的操作指令从通信单元70发送到具有所通知的行驶单元id的行驶单元12(s20)。
45.在具有行驶单元id的行驶单元12中,通信单元32接收操作指令。处理装置30基于操作指令,使用地图保持单元38中保持的地图信息和从位置信息获取单元28供应的行驶单元12的当前位置信息,以导出操作指令中包括的朝向目的地(推车单元14的当前位置)的行驶路线。在向目的地行驶时,处理装置30基于由物体检测传感器24测得的检测数据,确定沿着行驶路线的前进方向和行驶速度,以避免与周围物体碰撞,并控制驱动装置34的驱动。
46.当行驶单元12移动到作为回收目标的推车单元14的位置时,在行驶单元12与推车单元14彼此接近的状态下,处理装置30控制车轮20的驱动并将连接装置26与被连接部分48连接,操作锁定机构,并将连接装置26与被连接部分48连接。当连接装置26耦合到被连接部分48时,连接装置26向处理装置30发送指示连接完成的信号。
47.在推车单元14中,当被连接部分48连接到连接装置26时,被连接部分48向处理装置52发送指示连接完成的信号。当处理装置52从被连接部分48获取到指示连接完成的信号时,处理装置52使腿部分46后退并使它们从地面分离。
48.此后,行驶单元12的处理装置30使用由地图保持单元38保持的地图信息和从位置信息获取单元28供应的行驶单元12的当前位置信息,并导出操作指令中包括的朝向目的地
(推车单元14的回收地点)的行驶路线。处理装置30控制驱动装置34的驱动以沿着行驶路线行驶。当行驶单元12移动到推车单元14的回收地点时,处理装置30通知推车单元14它已经到达目的地。在推车单元14中,处理装置52接收该通知并使腿部分46与地面接触。
49.此后,处理装置30使将连接装置26与被连接部分48连接的锁定机构释锁。当处理装置30依据从服务器装置6发送的操作指令完成操作(任务)时,处理装置30通知服务器装置6任务完成。在服务器装置6中,单元管理单元88接收该通知,并将行驶单元12管理作为未被分配操作(任务)的行驶单元。
50.在上述第一实施例中,在s16中,操作确定单元84确定这样的回收操作:在该回收操作中,行驶单元12移动到推车单元14的位置,与推车单元14连接,并且将推车单元14牵引到预定回收地点。在另一示例中,行驶单元12可以将其上放置有产品的另一推车单元14牵引到作为回收目标的推车单元14的位置,并且在该位置处执行更换推车单元14的操作。
51.即,在另一示例中,在s18中,单元管理单元88从作为收集目标的推车单元14周围存在的多个行驶单元12当中识别出未被分配操作(任务)的行驶单元12,即为连接到其上装载有产品的推车单元14的行驶单元12。单元管理单元88向操作指令生成单元86通知识别到的行驶单元12的行驶单元id和作为回收目标的推车单元14的当前位置信息。在s20中,操作指令生成单元86生成将其上装载有产品的推车单元14牵引到作为回收目标的推车单元14的位置、从其上装载有产品的推车单元14分离、以及然后连接到作为回收目标的推车单元14以将该推车单元14牵引到预定回收地点的操作指令。操作指令生成单元86将包括作为回收目标的推车单元14的当前位置信息的操作指令从通信单元70发送到具有所通知的行驶单元id的行驶单元12。
52.在具有行驶单元id的行驶单元12中,通信单元32接收操作指令。处理装置30基于操作指令,使用地图保持单元38中保持的地图信息和从位置信息获取单元28供应的行驶单元12的当前位置信息,以导出操作指令中包括的朝向目的地(作为回收目标的推车单元14的当前位置)的行驶路线。处理装置30控制驱动装置34的驱动以沿着行驶路线行驶。
53.当行驶单元12移动到作为回收目标的推车单元14的位置时,处理装置30通知其上装载有产品的推车单元14产品已经到达目的地。在其上装载有产品的推车单元14中,处理装置52接收该通知并使腿部分46与地面接触。
54.此后,处理装置30使将连接装置26与其上装载有产品的推车单元14的被连接部分48连接的锁定机构释锁。然后,处理装置30使行驶单元12接近作为回收目标的推车单元14,将连接装置26与被连接部分48连接,并且操作锁定机构以将连接装置26连接到被连接部分48。当连接装置26耦合到被连接部分48时,连接装置26向处理装置30发送指示连接完成的信号。
55.在作为回收目标的推车单元14中,当被连接部分48连接到连接装置26时,被连接部分48向处理装置52发送指示连接完成的信号。当处理装置52从被连接部分48获取到指示连接完成的信号时,处理装置52使腿部分46后退并使它们从地面分离。
56.此后,行驶单元12的处理装置30使用由地图保持单元38保持的地图信息和从位置信息获取单元28供应的行驶单元12的当前位置信息,并导出操作指令中包括的朝向目的地(推车单元14的回收地点)的行驶路线。处理装置30控制驱动装置34的驱动以沿着行驶路线行驶。当行驶单元12移动到推车单元14的回收地点时,处理装置30通知推车单元14它已经
到达目的地。在推车单元14中,处理装置52接收该通知并使腿部分46与地面接触。
57.此后,处理装置30使将连接装置26与被连接部分48连接的锁定机构释锁。当处理装置30依据从服务器装置6发送的操作指令完成操作(任务)时,处理装置30通知服务器装置6任务完成。在服务器装置6中,单元管理单元88接收该通知,并将行驶单元12管理作为未被分配操作(任务)的行驶单元。
58.将描述一种情况:在该情况中,在s18中,单元管理单元88未能从作为回收目标的推车单元14周围存在的多个行驶单元12当中识别出未被分配操作(任务)并且连接到其上装载有产品的推车单元14的行驶单元12。此时,单元管理单元88向操作指令生成单元86通知上述情况,并向操作指令生成单元86通知在作为回收目标的推车单元14周围存在的行驶单元12当中的未被分配操作(任务)的行驶单元12的行驶单元id。
59.当操作指令生成单元86接收到该通知时,操作指令生成单元86生成连接到其上装载有产品的推车单元14、将推车单元14牵引到作为回收目标的推车单元14的位置、从其上装载有产品的推车单元14分离、以及然后连接到作为回收目标的推车单元14以将推车单元牵引到预定回收地点的操作指令。操作指令生成单元86将其上装载有产品的推车单元14的当前位置信息以及包括作为回收目标的推车单元14的当前位置信息的操作指令从通信单元70发送到具有所通知的行驶单元id的行驶单元12。
60.在第一实施例中,服务器装置6中的控制单元80向行驶单元12生成在推车单元14中的产品的剩余量变得小于预定量的时刻将推车单元14回收的操作指令。在另一示例中,控制单元80可以监视推车单元14中的产品的剩余量以判定产品是否销售良好。例如,当在不同地点处布置有承载相同产品的推车单元14时,控制单元80可以生成将产品销售不良的推车单元14移动到产品销售良好的推车单元14布置所在的位置的操作指令,并且将所生成的操作指令发送到行驶单元12。
61.在第一实施例中,已经描述了要装载在收容部分8上的产品是花的情况。然而,产品可以是衣服、帽子、鞋、以及手套等。此时,推车单元14的本体部分40可以配备有用户能够使用增强现实(augmented reality,ar)来试穿的虚拟试穿系统。此外,在第一实施例中,以用户将购买的产品带回作为前提。然而,例如,行驶单元12可以将购买的产品运送到用户的家中。
62.此外,在第一实施例中,已经描述了要放置在收容部分8上的物体是打算出售的产品的情况。然而,该物体可以是例如水和食品等不打算出售的救济用品。由于推车单元14搭载有电源装置50,因此例如可以通过将推车单元14布置在已经发生灾害的区域中来使用电源装置50的电力。
63.此外,在第一实施例中,示出了将推车单元14布置在办公区的角落中的示例。然而,例如,推车单元14可以用于在边缘村庄(marginal village)中销售新鲜食品。此外,可通过将自动售货机装载在收容部分8上而将推车单元14布置在活动举办地点处。第二实施例
64.在第二实施例中,推车单元14提供垃圾回收服务。图11示出了回收垃圾的推车单元14的示例。行驶单元12将推车单元14牵引到从服务器装置6发送的操作指令中包括的垃圾回收位置,并在垃圾回收位置处使推车单元14脱离。在推车单元14从行驶单元12分离之前,处理装置52使腿部分46与地面接触以限制推车
单元14的移动。推车单元14可以布置在容易生成垃圾的地方中,例如,布置在公园的角落中。
65.图11中所示的推车单元14具有用于将垃圾放入收容部分8中的多个垃圾箱90。物体传感器56获取用于检测放入垃圾箱90中的物体(垃圾)的量的信息。在图11中所示的示例中,物体传感器56是获取捕获有布置在收容部分8中的垃圾箱90的内部的图像信息的图像传感器。然而,物体传感器56可以是获取在垃圾箱90中放入的物体(垃圾)的重量信息的重量传感器。由物体传感器56获取的传感器信息被供应给处理装置52,并且在提供垃圾回收服务的同时,处理装置52周期性地将由物体传感器56获取的传感器信息与推车单元id一起从通信单元54发送到服务器装置6。如果处理装置52具有检测物体的量已经改变,即,垃圾已被放入垃圾箱90中的功能,则在该时刻,可以将由物体传感器56获取的传感器信息从通信单元54发送到服务器装置6。
66.当推车单元14中的垃圾箱90装满垃圾时,推车单元14存在于垃圾回收位置处是没有意义的。因此,当累积垃圾的量增加时,优选地,将推车单元14从垃圾回收位置移开,并且替代地,将配备有空垃圾箱90的另一推车单元14布置在垃圾回收位置处。
67.图12示出了服务器装置6中的处理的流程图。在服务器装置6中,通信单元70接收由推车单元14中的物体传感器56获取的传感器信息(s30)。检测单元74根据由物体传感器56获取的传感器信息,检测放置在收容部分8上的物体的量(累积量)(s32)。要检测的物体的量可以是物体的体积或物体的重量。
68.将描述由物体传感器56获取的传感器信息是通过拍摄收容部分8而获取的图像信息的情况。检测单元74具有图像识别功能,并从图像信息中检测垃圾的量。这里,检测单元74可以通过从图像信息检测垃圾箱90的空余容积来检测放入垃圾箱90中的垃圾的量。
69.判定单元82判定由检测单元74检测到的垃圾的量是否超过预定量(s34)。这里,充当阈值的预定量可以是例如累积到垃圾投入口的高度的垃圾的量。当垃圾累积的高度小于垃圾投入口的高度时,判定单元82判定累积垃圾未超过预定量(s34中为“否”)。
70.相反,当垃圾累积的高度达到垃圾投入口的高度时,判定单元82判定垃圾的累积量超过预定量(s34中为“是”)。当垃圾的累积量超过预定量时,操作确定单元84确定行驶单元12的操作(s36)。这里,操作确定单元84确定将其中累积垃圾的量超过预定量的推车单元14回收的操作。该回收操作是这样的操作:在该操作中,行驶单元12移动到推车单元14的位置、连接到推车单元14、并且将推车单元14牵引到预定回收地点。作为牵引目的地的预定回收地点可以是例如用于处理垃圾的设施。
71.单元管理单元88从存在于推车单元14周围的行驶单元当中识别未被分配操作(任务)的行驶单元12(s38)。单元管理单元88向操作指令生成单元86通知识别到的行驶单元12的行驶单元id和作为回收目标的推车单元14的当前位置信息。操作指令生成单元86生成移动到推车单元14的位置、与推车单元14连接、并将推车单元14牵引到预定回收地点的指令。操作指令生成单元86将包括作为回收目标的推车单元14的当前位置信息的操作指令从通信单元70发送到具有所通知的行驶单元id的行驶单元12(s40)。
72.在具有行驶单元id的行驶单元12中,通信单元32接收操作指令。处理装置30基于操作指令,使用地图保持单元38中保持的地图信息和从位置信息获取单元28供应的行驶单元12的当前位置信息,以导出操作指令中包括的朝向目的地(推车单元14的当前位置)的行
驶路线。处理装置30控制驱动装置34的驱动以沿着行驶路线行驶。
73.当行驶单元12移动到作为回收目标的推车单元14的位置时,在行驶单元12与推车单元14彼此接近的状态下,处理装置30控制车轮20的驱动并将连接装置26与被连接部分48连接,操作锁定机构,并将连接装置26与被连接部分48连接。当连接装置26耦合到被连接部分48时,连接装置26向处理装置30发送指示连接完成的信号。
74.在推车单元14中,当被连接部分48连接到连接装置26时,被连接部分48向处理装置52发送指示连接完成的信号。当处理装置52从被连接部分48获取到指示连接完成的信号时,处理装置52使腿部分46后退并使它们从地面分离。
75.此后,行驶单元12的处理装置30使用由地图保持单元38保持的地图信息和从位置信息获取单元28供应的行驶单元12的当前位置信息,并导出操作指令中包括的朝向目的地(推车单元14的回收地点)的行驶路线。处理装置30控制驱动装置34的驱动以沿着行驶路线行驶。当行驶单元12移动到推车单元14的回收地点时,处理装置30通知推车单元14它已经到达目的地。在推车单元14中,处理装置52接收该通知并使腿部分46与地面接触。
76.此后,处理装置30使将连接装置26与被连接部分48连接的锁定机构释锁。当处理装置30依据从服务器装置6发送的操作指令完成操作(任务)时,处理装置30通知服务器装置6任务完成。在服务器装置6中,单元管理单元88接收该通知,并将行驶单元12管理作为未被分配操作(任务)的行驶单元。
77.在上述第二实施例中,在s36中,操作确定单元84确定这样的回收操作:在该回收操作中,行驶单元12移动到推车单元14的位置、与推车单元14连接、并且将推车单元14牵引到预定回收地点。在另一示例中,行驶单元12可以将其上放置有空垃圾箱90的另一推车单元14牵引到作为回收目标的推车单元14的位置,并且在该位置处执行更换推车单元14的操作。
78.即,在另一示例中,在s38中,单元管理单元88从作为回收目标的推车单元14周围存在的多个行驶单元12当中识别出了未被分配操作(任务)并且连接到其上装载有空垃圾箱90的推车单元14的行驶单元12。单元管理单元88向操作指令生成单元86通知识别到的行驶单元12的行驶单元id和作为回收目标的推车单元14的当前位置信息。在s40中,操作指令生成单元86生成将其上装载有空垃圾箱90的推车单元14牵引到作为回收目标的推车单元14的位置、从其上装载有空垃圾箱90的推车单元14分离、以及然后连接到作为回收目标的推车单元14以将该推车单元14牵引到预定回收地点的操作指令。操作指令生成单元86将包括作为回收目标的推车单元14的当前位置信息的操作指令从通信单元70发送到具有所通知的行驶单元id的行驶单元12。
79.在具有行驶单元id的行驶单元12中,通信单元32接收操作指令。处理装置30基于操作指令,使用地图保持单元38中保持的地图信息和从位置信息获取单元28供应的行驶单元12的当前位置信息,以导出操作指令中包括的朝向目的地(作为回收目标的推车单元14的当前位置)的行驶路线。处理装置30控制驱动装置34的驱动以沿着行驶路线行驶。
80.当行驶单元12移动到作为回收目标的推车单元14的位置时,处理装置30通知其上装载有空垃圾箱90的推车单元14空垃圾箱90已经到达目的地。在其上装载有空垃圾箱90的推车单元14中,处理装置52接收该通知并使腿部分46与地面接触。
81.此后,处理装置30使将连接装置26与其上装载有空垃圾箱90的推车单元14的被连
接部分48连接的锁定机构释锁。然后,处理装置30使行驶单元12接近作为回收目标的推车单元14,将连接装置26与被连接部分48连接,并且操作锁定机构以将连接装置26连接到被连接部分48。当连接装置26耦合到被连接部分48时,连接装置26向处理装置30发送指示连接完成的信号。
82.在作为回收目标的推车单元14中,当被连接部分48连接到连接装置26时,被连接部分48向处理装置52发送指示连接完成的信号。当处理装置52从被连接部分48获取到指示连接完成的信号时,处理装置52使腿部分46后退并使它们从地面分离。
83.此后,行驶单元12的处理装置30使用由地图保持单元38保持的地图信息和从位置信息获取单元28供应的行驶单元12的当前位置信息,并导出操作指令中包括的朝向目的地(推车单元14的回收地点)的行驶路线。处理装置30控制驱动装置34的驱动以沿着行驶路线行驶。当行驶单元12移动到推车单元14的回收地点时,处理装置30通知推车单元14它已经到达目的地。在推车单元14中,处理装置52接收该通知并使腿部分46与地面接触。
84.此后,处理装置30使将连接装置26与被连接部分48连接的锁定机构释锁。当处理装置30依据从服务器装置6发送的操作指令完成操作(任务)时,处理装置30通知服务器装置6任务完成。在服务器装置6中,单元管理单元88接收该通知,并将行驶单元12管理作为未被分配操作(任务)的行驶单元。
85.将描述一种情况:在该情况中,在s38中,单元管理单元88未能从作为回收目标的推车单元14周围存在的行驶单元12当中识别出未被分配操作(任务)并且连接到其上装载有空垃圾箱90的推车单元14的行驶单元12。此时,单元管理单元88向操作指令生成单元86通知上述情况,并向操作指令生成单元86通知在作为回收目标的推车单元14周围存在的行驶单元12当中的未被分配操作(任务)的行驶单元12的行驶单元id。
86.当操作指令生成单元86接收到该通知时,操作指令生成单元86生成连接到其上装载有空垃圾箱90的推车单元14、将推车单元14牵引到作为回收目标的推车单元14的位置、从其上装载有空垃圾箱90的推车单元14分离、以及然后连接到作为回收目标的推车单元14以将推车单元牵引到预定回收地点的操作指令。操作指令生成单元86将其上装载有空垃圾箱90的推车单元14的当前位置信息以及包括作为回收目标的推车单元14的当前位置信息的操作指令从通信单元70发送到具有所通知的行驶单元id的行驶单元12。
87.在第二实施例中,已经描述了要装载在收容部分8上的物体是垃圾的情况。然而,要装载的物体可以是要再循环的家用电器。此外,在第二实施例中,示出了将推车单元14布置在公园的角落中的示例。然而,推车单元14可以布置在活动举办地点中。
88.以上已经基于一些实施例描述了本发明。该实施例是示例,并且本领域技术人员理解,可能做出针对这些部件中的每个部件的组合和这些处理过程中的每个过程的组合的各种变形例,并且这些变形例也在本发明的范围内。在该实施例中,以行驶单元12和推车单元14被配置成是可连接的和可分离的为前提。然而,行驶单元12和推车单元14可以配置成是不可分离的。
89.在本实施例中,服务器装置6包括处理装置72。然而,在变形示例中,行驶单元12可以具有服务器装置6中的处理装置72的功能。
90.在第一实施例中,推车单元14提供商店服务。然而,例如,投影仪可以安装在推车单元14上,并且可以提供投影映射服务。此外,3d打印机可以安装在推车单元14上,并且可
以提供3d打印机的租赁服务。此外,推车单元14可以搭载有市政厅功能,以向居住在人口稀少地区的用户提供市政厅服务。此外,推车单元14可以用于移动服务。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。