技术特征:
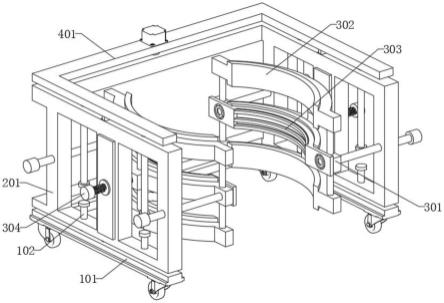
1.一种搬运机器人,其特征在于:包括:安装部(1)、调节部(2)、夹持部(3)、控制部(4);所述安装部(1)包括:底架(101),底架(101)的底部设有移动轮,底架(101)的中间位置转动连接有螺纹杆,底架(101)的底部设有控制电机;所述调节部(2)设置在安装部(1)的上方,调节部(2)的调节架(201)螺纹连接在底架(101)的上方,调节架(201)滑动连接在安装部(1)的稳定杆(102)上,调节部(2)包括:控制块(203),控制块(203)的外壁上设有卡齿,控制块(203)的中间位置设有螺纹通孔,控制块(203)转动连接在调节部(2)的伸缩槽(202)内;所述夹持部(3)设置在调节部(2)的内部,夹持部(3)的夹持架(301)滑动连接在调节架(201)上,夹持部(3)的控制杆(304)螺纹连接在控制块(203)上,所述夹持架(301)为圆弧板状结构,夹持架(301)上设有矩形凸起,夹持架(301)的矩形凸起上设有圆柱状滑动杆,夹持架(301)共设有两组;所述控制部(4)设置在调节部(2)的顶部,控制部(4)的控制架(401)滑动连接在调节架(201)的顶部,控制部(4)的带动板(402)滑动连接在夹持板调节部(2)的伸缩槽(202)内,带动板(402)与控制块(203)通过卡齿相连接。2.如权利要求1所述的一种搬运机器人,其特征在于:所述稳定杆(102)的顶部设有圆柱状凸起,稳定杆(102)固定在底架(101)的顶部。3.如权利要求1所述的一种搬运机器人,其特征在于:所述调节架(201)的左右两侧设有圆形通孔,调节架(201)的中间位置设有螺纹通孔,调节架(201)的上下两端分别设有圆形通孔;所述伸缩槽(202)的中间位置连接有圆柱状凹槽,伸缩槽(202)的圆柱状凹槽连接有圆形通孔,伸缩槽(202)共设有两组,两组伸缩槽(202)分别设置在调节架(201)顶部的左右两侧。4.如权利要求1所述的一种搬运机器人,其特征在于:所述夹持部(3)还包括:稳定板(302),稳定板(302)的上下两端分别设有圆弧状凸起,稳定板(302)上设有矩形凸起,稳定板(302)的底部设有圆柱杆,稳定板(302)共设有四组,四组稳定板(302)分别固定在两组夹持架(301)的上下两端。5.如权利要求1所述的一种搬运机器人,其特征在于:所述夹持部(3)还包括:防滑板(303)、控制杆(304);所述防滑板(303)上设有矩形凸起,防滑板(303)的内壁上设有圆弧状凸起,防滑板(303)上设有矩形凸起,防滑板(303)共设有两组,两组防滑板(303)分别通过螺钉固定在夹持架(301)的内壁上;所述控制杆(304)上设有圆柱状凸起,控制杆(304)共设有两组,两组控制杆(304)分别固定在夹持架(301)上。6.如权利要求1所述的一种搬运机器人,其特征在于:所述控制架(401)的底部设有圆柱状滑动杆,控制架(401)的中间位置设有电动伸缩杆;所述带动板(402)上设有卡齿,带动板(402)共设有两组,两组带动板(402)分别固定在控制架(401)的底部。
技术总结
本实用新型提供一种搬运机器人,涉及搬运设备技术领域,以解决现有的搬运机器人在使用时,大都需要通过人力将柱状产品进行装载,从而才能进行搬运处理,导致其搬运效率较低的问题,包括:安装部;所述调节部设置在安装部的上方;所述夹持部设置在调节部的内部;所述控制部设置在调节部的顶部。控制杆固定在夹持架上,并且其螺纹连接在控制块上,从而便于通过电动伸缩杆带动控制架进行升降,使其便于控制板进行调节,从而便于通过板上卡齿带动控制块进行转动,从而控制夹持架进行收紧,使其可直接对柱状产品进行夹持,从避免人力装运,同时通过稳定板与防滑板,便于保持产品的稳定性,从而避免产品在搬运过程中下滑。从而避免产品在搬运过程中下滑。从而避免产品在搬运过程中下滑。
技术研发人员:徐小艳 马铁成
受保护的技术使用者:江苏利木能科技有限公司
技术研发日:2022.06.20
技术公布日:2022/12/1
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。