1.本发明涉及海洋装备技术领域,特别是涉及一种海底管道外表面清洗装置。
背景技术:
2.海底管道是海上油气输送的主要途径,基于海底环境的特殊性,海底管道铺设维护的条件也极其苛刻,如何在使用时保障其安全显得尤为重要。海底管道有埋于海底的部分,也有裸露段。裸露段部分由于长期处于海底环境,会生长有海蛎子、藤壶等海生物,部分海底管道甚至会发生锈蚀,进而导致海底管道产生腐蚀、损伤等,令管道恶化。然而,目前的针对海底管道清洗的机器人,集中于管道内表面的清洗,对于海底管道外表面的清洗技术,尚未有成熟的应用。
3.综上,提供一种海底管道外表面清洗装置是本领域技术人员亟需解决的问题。
技术实现要素:
4.本发明的目的是提供一种海底管道外表面清洗装置,以解决上述现有技术存在的问题,能够抱紧于海底管道上,并能够在海底管道上行走,当海底管道外表面生长有海蛎子、藤壶等海生物或者存在锈蚀时,利用高压水射流,对海底管道表面的海生物和锈蚀进行清理。
5.为实现上述目的,本发明提供了如下方案:
6.本发明提供一种海底管道外表面清洗装置,包括主体机构、抓抱机构、巡航机构和清洗机构;其中,所述主体机构用于承载所述抓抱机构、巡航机构和清洗机构,所述抓抱机构用于抓紧海底管道避免装置晃动,所述巡航机构用于使整个装置在海底管道外表面上行走,所述清洗机构用于对海底管道外表面进行清洗;
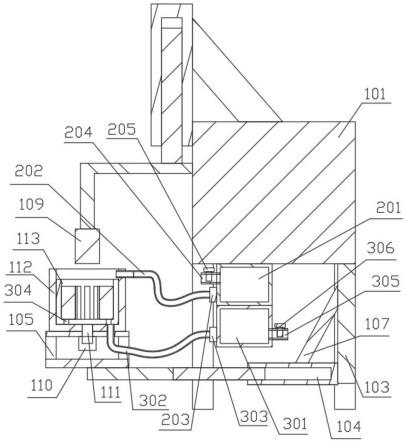
7.所述主体机构包括主体支架、巡航臂支架和滑板;所述主体支架包括支撑板和设置于所述支撑板的底部四角处的四个支撑腿,每个所述支撑腿的底部连接一所述抓抱机构的抓抱臂,所述抓抱臂由抓抱油缸控制抱紧或松开所述海底管道;所述主体支架的首尾端分别设置两个所述巡航臂支架,各所述巡航臂支架通过一巡航臂连接行走履带,所述巡航臂由巡航油缸控制转动;所述滑板设置于所述支撑板的底部,所述滑板上设置有一由丝杆机构驱动滑动的滑块,所述滑块的两侧连接所述清洗机构;
8.所述主体支架上还安装有管道检测器、控制器和供电系统,所述管道检测器用于检测所述海底管道表面是否存在需要清理的异物,所述管道检测器与所述控制器电连接,所述管道检测器的信号传递给所述控制器,由所述控制器控制所述抓抱机构、巡航机构和清洗机构工作,所述供电系统用于为整个装置供应电力。
9.优选地,所述支撑板的首尾端分别设置有一向下开口的y型支撑架,所述巡航臂支架设置于所述y型支撑架上,所述支撑板的顶部设置有吊耳。
10.优选地,每个所述支撑腿的外侧安装有一所述抓抱油缸,所述抓抱油缸的缸体顶端与所述支撑腿铰接,所述抓抱臂的顶端设置有两个铰接点,一个所述铰接点与所述抓抱
油缸的伸缩杆的底端铰接,另一个所述铰接点与所述支撑腿的底端铰接,所述抓抱臂的底端设置有抓抱爪。
11.优选地,所述滑板的底部两端还分别设置有一上顶油缸,所述上顶油缸用于伸长压紧管道。
12.优选地,所述巡航油缸设置于所述巡航臂支架的顶部,所述巡航油缸的缸体与所述y型支撑架铰接,所述巡航臂靠近所述巡航臂支架的一端设置有两个铰接点,顶部的铰接点与所述巡航油缸的伸缩杆铰接,底部铰接点与所述巡航臂支架远离所述y型支撑架的一端铰接,所述巡航臂远离所述巡航臂支架的一端连接所述行走履带。
13.优选地,所述丝杆机构包括丝杆和丝杆电机,所述丝杆的两端由两个所述y型支撑架支撑,所述丝杆的其中一端穿过所述y型支撑架连接所述丝杆电机,所述滑块与所述丝杆螺纹连接,所述滑块的底部与所述滑板滑动配合连接。
14.优选地,所述清洗机构包括底座、机械臂和喷嘴,所述滑块的两侧分别设置有一所述底座,所述底座为能够绕着所述底座的中心360
°
转动的转动底座,两个所述底座的外侧连接所述机械臂,所述机械臂的末端设置所述喷嘴,由所述机械臂带动所述喷嘴动作。
15.优选地,所述喷嘴为旋转喷嘴,所述喷嘴与岸上的高压泵组连接。
16.优选地,所述管道检测器为安装在所述主体支架上的传感器或摄像头。
17.本发明相对于现有技术取得了以下有益技术效果:
18.本发明提供的海底管道外表面清洗装置,通过设置抓抱机构和巡航机构实现清洗装置在海底管道上行走和固定,再结合清洗机构,能够实现海底管道表面的清洗作业,当海底管道外表面生长有海蛎子、藤壶等海生物或者存在锈蚀时,利用喷嘴喷出的高压水射流,对海底管道表面的海生物和锈蚀进行清理。
附图说明
19.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
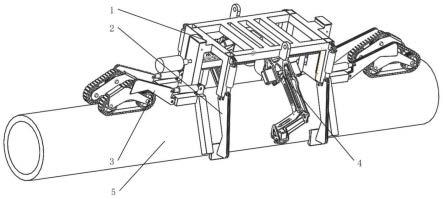
20.图1为本发明中海底管道外表面清洗装置的整体结构示意图;
21.图2为本发明中主体机构的结构示意图;
22.图3为本发明中抓抱机构的结构示意图;
23.图4为本发明中巡航机构的结构示意图;
24.图5为本发明中清洗机构的结构示意图;
25.图中:1为主体机构,1-1为主体支架,1-2为滑板,1-3为巡航臂支架,1-4为y型支撑架,1-5为吊耳,2为抓抱机构,2-1为抓抱油缸,2-2为上顶油缸,2-3为抓抱臂,2-4为抓抱爪,3为巡航机构,3-1为巡航油缸,3-2为巡航臂,3-3为履带,4为清洗机构,4-1为滑块,4-2为底座,4-3为机械臂,4-4为喷嘴,4-5为丝杆机构,4-6为丝杆电机,5为海底管道。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完
整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
27.本发明的目的是提供一种海底管道外表面清洗装置,以解决现有技术存在的问题。
28.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
29.本实施例中的海底管道外表面清洗装置,如图1-图5所示,包括主体机构1、抓抱机构2、巡航机构3和清洗机构4;其中,主体机构1用于承载抓抱机构2、巡航机构3和清洗机构4,抓抱机构2用于抓紧海底管道5避免装置晃动,巡航机构3用于使整个装置在海底管道5外表面上行走,清洗机构4用于对海底管道5外表面进行清洗;
30.主体机构1包括主体支架1-1、巡航臂支架1-3和滑板1-2;主体支架1-1包括支撑板和设置于支撑板的底部四角处的四个支撑腿,每个支撑腿的底部连接一抓抱机构2的抓抱臂2-3,抓抱臂2-3由抓抱油缸2-1控制抱紧或松开海底管道5;主体支架1-1的首尾端分别设置两个巡航臂支架1-3,各巡航臂支架1-3通过一巡航臂3-2连接行走履带3-3,巡航臂3-2由巡航油缸3-1控制转动;滑板1-2设置于支撑板的底部,滑板1-2上设置有一由丝杆机构4-5驱动滑动的滑块4-1,滑块4-1的两侧连接清洗机构4;
31.主体支架1-1上还安装有管道检测器、控制器和供电系统,管道检测器用于检测海底管道5表面是否存在需要清理的异物,管道检测器与控制器电连接,管道检测器的信号传递给控制器,由控制器控制抓抱机构2、巡航机构3和清洗机构4工作,供电系统用于为整个装置供应电力。
32.于本具体实施例中,支撑板的首尾端分别设置有一向下开口的y型支撑架1-4,巡航臂支架1-3设置于y型支撑架1-4上,y型支撑架1-4顶部的纵向杆体连接支撑板,y型支撑架1-4底部的两个倾斜支腿骑跨于海底管道5上。
33.本实施例中,在支撑板的顶部设置有吊耳1-5,吊耳1-5的设置方便吊机对整个装置的起吊。
34.于本具体实施例中,每个支撑腿的外侧安装有一抓抱油缸2-1,抓抱油缸2-1的缸体顶端与支撑腿铰接,抓抱臂2-3的顶端设置有两个铰接点,一个铰接点与抓抱油缸2-1的伸缩杆的底端铰接,另一个铰接点与支撑腿的底端铰接,抓抱臂2-3的底端设置有抓抱爪2-4。滑板1-2的底部两端还分别设置有一上顶油缸2-2,上顶油缸2-2用于伸长压紧管道。当需要抓抱管道时,抓抱油缸2-1的伸长带动抓抱臂2-3向下转动,进而带动抓抱爪2-4压紧管道,然后,上顶油缸2-2伸长压紧管道。从而,两个抓抱爪2-4和一个上顶油缸2-2形成三角支点,令抓抱更牢固。
35.于本具体实施例中,巡航油缸3-1设置于巡航臂支架1-3的顶部,巡航油缸3-1的缸体与y型支撑架1-4铰接,巡航臂3-2靠近巡航臂支架1-3的一端设置有两个铰接点,顶部的铰接点与巡航油缸3-1的伸缩杆铰接,底部铰接点与巡航臂支架1-3远离y型支撑架1-4的一端铰接,巡航臂3-2远离巡航臂支架1-3的一端连接行走履带3-3。当需要进行巡航时,巡航油缸3-1伸长,带动巡航臂3-2向下转动,令履带3-3紧贴海底管道5,然后通过履带3-3实现自主前进后退。当需要进行清洗作业时,巡航油缸3-1收缩,带动巡航臂3-2向上转动,令履
带3-3脱离海底管道5。
36.于本具体实施例中,丝杆机构4-5包括丝杆和丝杆电机4-6,丝杆的两端由两个y型支撑架1-4支撑,丝杆的其中一端穿过y型支撑架1-4连接丝杆电机4-6,滑块4-1与丝杆螺纹连接,滑块4-1的底部与滑板1-2滑动配合连接。丝杆电机4-6驱动丝杆转动,带动滑块4-1沿滑板1-2前后滑动,进而实现清洗机构4的前后移动。
37.于本具体实施例中,清洗机构4包括底座4-2、机械臂4-3和喷嘴4-4,滑块4-1的两侧分别设置有一底座4-2,底座4-2为能够绕着底座4-2的中心360
°
转动的转动底座4-2,具体可通过在滑块4-1内嵌入电机来驱动底座4-2转动。两个底座4-2的外侧连接机械臂4-3,机械臂4-3的末端设置喷嘴4-4,由机械臂4-3带动喷嘴4-4动作。机械臂4-3由两个关节组成,每个关节由水下电机驱动转动;喷嘴4-4为旋转喷嘴4-4,嘴与岸上的高压泵组连接,可喷射柱状高压水射流,进而提高清洗效果。
38.于本具体实施例中,管道检测器为安装在主体支架1-1上的传感器或摄像头(传感器可以有多种选择类型,比如电涡流探头、磁漏检测可以检测管道表面有没有裂纹,超声探头可以看表面有没有异物);当传感器或摄像头检测海底管道5上存在海生物或者锈蚀时,传递信号给控制器,由控制器控制各部分机构进行相应工作。履带3-3的行走可以由控制器自动控制,也可以人为远程遥控。
39.本发明海底管道5外表面清洗装置,具体工作过程如下:
40.(1)巡航作业;
41.将本发明中的海底管道5外表面清洗装置,通过吊耳1-5吊放至某一海底管道5裸露段,巡航机构3中巡航油缸3-1伸长,控制器控制履带3-3移动或者人为遥控驱动履带3-3向前运动,直至通过传感器或摄像头发现海底管道5外表面存在海生物或者锈蚀。
42.(3)抓抱作业;
43.当发现海生物或者锈蚀时,履带3-3停止运动,抓抱油缸2-1和上顶油缸2-2伸长,使整个装置抱紧管道,然后巡航油缸3-1收缩令履带3-3脱离管道。
44.(4)清洗作业;
45.丝杆电机4-6工作,令滑块4-1带动清洗机构4至最前端,喷嘴4-4开始喷射高压水射流,机械臂4-3开始运动带动喷嘴4-4沿管道周向360度转动,高压水射流清洗海生物或者锈蚀。当清洗完某一环状带后,丝杆电机4-6带动清洗机构4继续移动,继续进行清洗。
46.(5)巡航作业;
47.清洗完该处后,继续自主或者人为遥控驱动履带3-3向前运动,当清洗完整条海底管道5裸露段后,用吊机将整个装置吊起。
48.本发明应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。