1.本发明涉及移动机器人领域,尤其涉及一种球形轮式机器人。
背景技术:
2.随着现代科技的发展,机器人开始出现在人们生活的各个领域。在一些不适合人类工作的领域,尤其是野外勘探、救援等非结构环境下的工作,机器人的作用显得格外重要。机器人在非结构环境中工作要具有较高的越障避障能力、良好的稳定性以及良好的运动性能。
3.在所有移动机器人中球形机器人突显出其独特的优越性,球形机器人即外观类似球形的机器人,其所有机构皆置于内部,当球形机器人从高处跌落时,球形的结构对其起到了很好的保护作用,当球形机器人在非结构环境下移动时,其独特的球形结构令其运动姿态的调整变得简易,可以保证机器人保持正常的姿态移动。
4.现有的球形机器人大多数都是依靠质量块偏移来驱动,这种驱动方式降低了机器人的移动速度和动力,质量块的惯性也会导致无法精准控制机器人的运动,极大的限制了球形机器人的实际使用范围,影响了球形机器人的发展。
技术实现要素:
5.本发明的目的在于一种轮式机器人,解决了靠质心偏移驱动的球形机器人移动不平稳、动力不足以及移动缓慢的问题。
6.为此,本发明提供了一种球形轮式机器人,包括:机体,包括三通孔固定块,其具有第一通孔、第二通孔和第三通孔,这三个通孔的轴线在空间上相互垂直交错,还包括在各个所述通孔的两端对称设置的电机端外壳和非电机端外壳,二者具有t型末端,以容纳90
°
变向双出轴机构;第一轮组、第二轮组、第三轮组、第四轮组、第五轮组和第六轮组,这六者结构相同,各个所述轮组包括在t型末端对称布置的一对大轮,还包括在大轮外侧且与大轮同轴布置的小轮,所述大轮和小轮的外周上间隔布置有滚轮;第一传动支链、第二传动支链和第三传动支链,这三者结构相同,与三个通孔一一对应布置,各个所述传动支链包括在电机端外壳中设置的双出轴电机和第一90
°
变向双出轴机构、以及在非电机端外壳中设置的传动轴和第二90
°
变向双出轴机构,其中,同一传动支链两端的轮组的轮子轴线平行,不同传动支链上的轮子轴线相互垂直。
7.本发明将轮式机器人和球形机器人结合,使其既具有轮式移动机器人运动速度快、运动稳定的优点,又具有球形机器人灵活性高的优点,利用电机驱动克服了利用配重块驱动时动力不足的问题,增强了机器人在非结构环境中的运动性能,提高了机器人的控制精度,增强了机器人适应各种复杂地形的能力,极大地扩大了球形机器人的实际应用范围,有利于球形机器人的发展和推广。
8.本发明的机器人由六个轮组布置呈球形,具有结构紧凑新颖、灵活性高等优点,可以应用于野外勘测、救援、教学示范等领域。
9.除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
附图说明
10.构成本技术的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
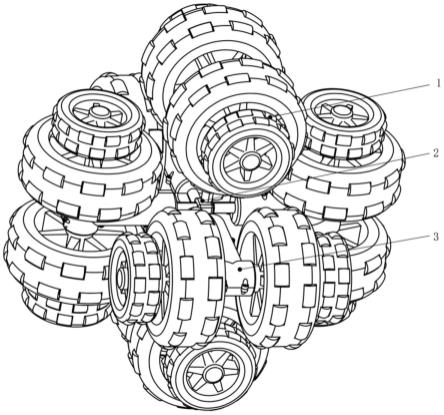
11.图1是本发明的一种球形轮式机器人整体结构示意图;
12.图2是本发明的一种球形轮式机器人轮子装配示意图;
13.图3是本发明的一种球形轮式机器人轮子的结构示意图;
14.图4是图3的局部a的放大图;
15.图5是本发明的一种球形轮式机器人外壳装配意图;
16.图6是本发明的一种球形轮式机器人非电机端外壳的结构示意图;
17.图7是本发明的一种球形轮式机器人电机端外壳的结构示意图;
18.图8是本发明的一种球形轮式机器人传动支链系统的结构示意图;
19.图9是本发明的一种球形轮式机器人单传动支链的结构示意图;
20.图10是本发明的一种球形轮式机器人三通孔固定块的结构示意图;
21.图11-图13是本发明的一种球形轮式机器人在不同场景中移动的示意图;其中,图11示出了该机器人在平面移动;图12示出了该机器人在沟壑中移动;图13示出了该机器人在非结构环境下移动。
22.附图标记说明
23.图1中:1.轮组;2.传动支链;3.机体;
24.图2中:11.大轮;12.小轮;
25.图3和图4中:111.滚轮;112.轮胎;113.轮毂;114.小轴;
26.图5中:31.非电机端外壳;32.电机端外壳;
27.图6和图7中:311.固定块连接部;312.支撑块凹槽;321.电机凹槽;
28.图8中:21.第一传递支链;22.第二传递支链;23.第三传递支链;
29.图9中:211、215.十字形支撑块;212.从动伞齿轮;213.半圆形支撑块;214.驱动伞齿轮;216.三通孔固定块;217.电机;218.联轴器。
具体实施方式
30.下面将参考附图并结合实施例来详细说明本发明。
31.如图1所示,本发明的球形轮式机器人包括轮子1、传动支链统2、机体3。
32.如图2所示,本球形轮式机器人共有12个轮子,其包括大轮11和小轮12,大轮安装在内侧,小轮安装在外侧,这使机器人可以更好的在沟壑地形中移动,每条传动支链上安装4个轮子,同一传动支链两端的轮子轴线平行,不同传动支链上的轮子轴线相互垂直,这种设计可以让机器人运动更加灵活。
33.如图3和图4所示,本球形轮式机器人的大轮和小轮都是由滚轮111、轮胎112、轮毂113和小轴114组成,滚轮和小轴等间距安装于轮胎上。
34.如图5所示,本球形轮式机器人的机体包括非电机端外壳31和电机端外壳32,同一
端外壳31、32由两半外壳通过螺钉紧固连接形成。本球形轮式机器人的机体还包括三通孔固定块216,其具有三个通孔,三个通孔的轴线在空间上相互垂直交错。
35.如图6和图7所示,本球形轮式机器人的非电机端外壳上设置有固定块连接部311和支撑块凹槽312,电机端外壳上多了一个电机凹槽321。非电机端外壳和电机端外壳具有t型末端,以容纳90
°
变向双出轴机构。
36.如图8所示,本球形轮式机器人的传动支链系统包括第一传动支链21、第二传动支链22和第三传动支链23,三条传动支链相同且相互垂直。
37.如图9所示,本球形轮式机器人的传动支链主要由两个90
°
变向双出轴机构、电机217和联轴器218组成,其中90
°
变向双出轴机构由驱动伞齿轮214和一对从动伞齿轮212组成,驱动伞齿轮轴与电机输出轴通过联轴器218相连,一对从动伞齿轮轴与轮子相连。
38.三通孔固定块216安装在每条传动支链中点位置,起到固定作用,三通孔固定块216通过凸台和外壳上的固定块连接部相连。
39.电机217为双出轴电机,在每条传动支链电机端外壳的电机凹槽里安装一个电机217,电机的输出轴轴线两两垂直,与从动伞齿轮的轴线垂直交汇。
40.非电机端外壳31和电机端外壳32中设有一些支撑块,这些支撑块包括半圆形支撑块213和十字形滑块211、215,半圆形支撑块213的安装位置:位于驱动伞齿轮正对的外壳凹槽内,5mm十字形滑块211的安装位置:位于从动伞齿轮轴对应的外壳凹槽内,8mm十字形滑块215安装于电机输出轴对应的外壳凹槽内。
41.如图9和图10所示,本球形轮式机器人的三通孔固定块通孔轴线空间相互垂直,固定块通孔尺寸的设计也保证了机器人的重心位于机器人的中心。
42.如图11至图13所示,本球形轮式机器人的球形结构令其容易地调整姿态,在复杂环境中移动,a为该机器人在平面移动,b为该机器人在沟壑中移动,c为该机器人在非结构环境下移动。
43.以上所述仅为本发明的实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。