1.本发明涉及机电式惯性传感器信号处理领域,特别涉及一种挠性陀螺前置放大调理电路及方法。
背景技术:
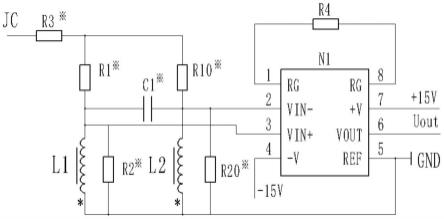
2.如图1中虚线框所示,传统的挠性陀螺前置放大电路包括差动桥路和运算放大器n1;差动桥路由陀螺信号器双绕组l1、l2与串接的电阻构成;通过电源预处理变压器n0对陀螺信号器双绕组l1、l2施加激励,当信号器双绕组l1、l2敏感气隙磁阻变化时,敏感电压通过桥路差动输出(即陀螺零位电压信号),该输出电压通过运算放大器n1比例放大后,交由后续电路进行滤波解调处理。传统挠性陀螺前置放大电路的缺点是:由于该电路中无调零、调相移及调梯度功能,因而不能对陀螺信号器的敏感信号进行预先调理。
技术实现要素:
3.为了解决传统挠性陀螺前置放大电路不能对陀螺信号器的敏感信号进行预先调理的技术问题,本发明提供了一种挠性陀螺前置放大调理电路及方法。
4.本发明的技术方案是:
5.一种挠性陀螺前置放大调理电路,包括信号器差动桥路电路和信号放大电路;其特殊之处在于:
6.所述信号器差动桥路电路包括陀螺信号器绕组l1、l2,电阻r
1*
、r
10*
;绕组l1与电阻r
1*
串接,绕组l2与电阻r
10*
串接,再并接构成信号器差动桥路电路;
7.所述挠性陀螺前置放大调理电路还包括:
8.调零电路,用于对所述信号器差动桥路电路输出的陀螺零位电压信号进行调试,使零位差动输出尽可能小,以及用于对经相位调试电路调试后的陀螺零位电压信号进行调零;
9.相位调试电路,用于对调零后的陀螺零位电压信号的相位进行平移,使零相位两端的相位幅值尽可能接近;
10.刚度中心调试电路,用于使陀螺刚度中心变化尽可能小,使陀螺零位电压信号对陀螺转子转速的微变化不敏感;
11.梯度调试电路,用于对经调零、相位调试、刚度中心调试和放大后的陀螺零位电压信号进行批一致性调整。
12.进一步地,所述调零电路包括调零电阻r
2*
、r
20*
;调零电阻r
2*
与所述绕组l1并联,调零电阻r
20*
与所述绕组l2并联,通过调整调零电阻r
2*
或r
20*
的阻值,能够改变所述绕组l1与调零电阻r
2*
或所述绕组l2与调零电阻r
20*
的电参数。
13.进一步地,所述相位调试电路包括移相电容c
1*
,c
1*
的一端接在所述电阻r
1*
与绕组l1之间,c
1*
的另一端接在所述电阻r
10*
与绕组l2之间;通过调整移相电容c
1*
,能平衡绕组l1与绕组l2的电容参数,使两电桥臂电容参数接近一致。
14.进一步地,所述刚度中心调试电路包括电阻r
1*
和电阻r
10*
;电阻r
1*
的一端同时接梯度电阻r
3*
和电阻r
10*
的一端,电阻r
1*
的另一端同时接绕组l1的一端、调零电阻r
2*
的一端以及移相电容c
1*
的一端;电阻r
10*
的一端同时接梯度电阻r
3*
的一端和电阻r
1*
的一端,电阻r
10*
的另一端同时接绕组l2的一端、移相电容c
1*
的另一端以及调零电阻r
20*
的一端。
15.进一步地,所述梯度调试电路包括分压电阻r
3*
,分压电阻r
3*
的一端接激磁端jc,另一端同时接电阻r
1*
和r
10*
的一端。
16.本发明还提供了一种基于上述的挠性陀螺前置放大调理电路对挠性陀螺输出信号进行放大调理的方法,其特殊之处在于,包括以下步骤:
17.步骤1,将陀螺信号器的敏感信号差动输出为陀螺零位电压信号,并对该陀螺零位电压信号进行调零;
18.步骤2,对调零后的陀螺零位电压信号进行相位平移,使其正负相位对称;
19.步骤3,对经步骤2相位平移后的陀螺零位电压信号再次进行调零;
20.步骤4,对经步骤3再次调零后的陀螺零位电压信号进行刚度中心调整,使其对陀螺转子转速的微变化不敏感;
21.步骤5,对经步骤4刚度中心调整后的陀螺零位电压信号进行放大;
22.步骤6,对经步骤5调整后的陀螺零位电压信号进行梯度调整,使不同批次陀螺最终输出的陀螺零位电压大小与陀螺输入速率比值的差异在5%以内。
23.进一步地,所述步骤1具体为:
24.先不接调零电阻r
20*
/r
2*
,调节调零电阻r
2*
/r
20*
的阻值,使得信号器差动桥路电路输出的陀螺零位电压信号与机械零位标定时的陀螺零位电压信号一致;若不能调节为一致,则去掉调零电阻r
2*
/r
20*
,接上调节调零电阻r
20*
/r
2*
并调节其阻值,直至信号器差动桥路电路输出的陀螺零位电压信号与机械零位标定时的陀螺零位电压信号一致。
25.进一步地,所述步骤2具体为:
26.检测陀螺零位电压信号相对于信号器输入激磁信号jc的相位变化,调整移相电容c
1*
的容值,直至陀螺零位电压信号的正负相位接近相等。
27.进一步地,所述步骤4具体为:
28.改变电机频率f0,改变量为f0的5%~10%,调整电阻r
1*
或r
10*
的阻值,检测频率改变前后陀螺输出零位差值,当频率改变前后陀螺输出零位差值小于0.05mv/hz时,调整到位。
29.进一步地,所述步骤5具体为:
30.将陀螺置于速率转台上,敏感轴与速率转台平行,检测陀螺敏感通道的零位电压变化,调整分压电阻r
3*
的阻值以改变陀螺信号器激磁电流大小,该电流变化引起信号器激磁磁场变化,信号器感应的陀螺零位输出电压幅值随之变化,将不同批次陀螺信号器感应的陀螺零位输出电压与陀螺输入速率的比值的差异控制在5%以内。
31.本发明的有益效果是:
32.1.本发明的挠性陀螺前置放大调理电路包括信号器差动桥路电路、调零电路、相位调试电路、刚性中心调试电路、信号放大电路和梯度调试电路。激磁信号直接加在信号器差动桥路电路上,当信号器气隙磁阻变化时,信号器差动桥路电路输出与信号器气隙磁阻变化成比例的陀螺零位电压信号,该陀螺零位电压信号经过调理和比例放大后,交由后续
电路进行滤波和解调处理。
33.2.本发明对陀螺零位电压信号的调理过程包括信号的调零、相位调试、刚度中心调试、信号放大和梯度调试。即:先对信号器差动桥路的输出信号进行调零,以实现陀螺电气零位与机械零位的重合,且确保陀螺闭环可靠;再对输出信号的相位进行调试,使其输出信号相对激磁输入信号的相位减小;然后调整陀螺的刚度中心,使陀螺转子工作过程中更接近“自由”状态;再对输出信号进行放大处理,最后通过在激磁端调试梯度电阻,使陀螺批生产的输出信号具有一致性。
34.3.陀螺中的电源预处理变压器的功能是将电源地与陀螺输出信号地隔离,以加下陀螺输出信号的噪声干扰。本发明中陀螺信号器绕组与串接的电阻r
1*
、r
10*
自身构成桥路结构,实现信号的差动输出功能,再对差动输出信号进行调零、调相位、调刚度以及调批一致性等预处理,仅需调整传统的后端滤波电路的滤波范围,便能够使陀螺输出信号的噪声干扰减小到可接受范围内,因此,采用本发明的放大调理电路之后,可以省去陀螺中的电源预处理变压器,使陀螺的整体尺寸大幅度减小,能够适用于微小型场景。
35.4.本发明可以在变磁阻差动桥式电感信号器的信号前置放大调理中进行推广。
附图说明
36.图1是传统挠性陀螺前置放大调理电路的原理图。
37.图2是本发明的电路原理图。
38.图3是本发明中桥路差动电路的原理图。
39.图4是本发明中调零电路的原理图。
40.图5是本发明中相位调试电路的原理图。
41.图6是本发明中梯度调试电路的原理图。
42.图7是本发明中信号放大电路的原理图。
具体实施方式
43.为使本发明的技术方案和优点更加清楚,以下结合附图对本发明作进一部说明。
44.如图2所示,本发明所提供的挠性陀螺前置放大电路,包括信号器差动桥路电路、调零电路、相位调试电路、刚性中心调试电路、信号放大电路和梯度调试电路。
45.信号器差动桥路电路用于信号器气隙磁阻发生变化时,对180
°
布局的绕组l1与绕组l2所敏感工作气隙磁阻变化带来的感应电压进行差动输出,本实施例中信号器差动桥路电路如图3所示,由陀螺信号器绕组l1、l2,电阻r
1*
、r
10*
构成,陀螺信号器绕组l1与电阻r
1*
串接,绕组l2与电阻r
10*
串接,再并接构成信号器差动桥路电路;陀螺信号器输入激磁信号jc与地gnd直接加在信号器差动桥路电路的两端,对陀螺信号器施加高频激励源,当绕组l1与绕组l2敏感工作气隙磁阻变化带来的感应电压不同时,通过信号器差动桥路电路的差动作用,输出与气隙磁阻变化成比例的陀螺零位电压信号。
46.调零电路用于对信号器差动桥路电路输出的陀螺零位电压信号进行调试,使零位差动输出尽可能小,本实施例中调零电路如图4中虚线框中所示(不含绕组),包括调零电阻r
2*
、r
20*
,r
2*
与l1并联,r
20*
与l2并联,通过调整电阻r
2*
或电阻r
20*
,可以改变绕组l1与电阻r
2*
或绕组l2与电阻r
20*
的电参数,使两电桥臂参数接近一致,以便信号器差动桥路电路的零位
差动输出接近零,从而使陀螺的电气零位与机械零位重合。
47.相位调试电路用于对调零后的陀螺零位电压信号的相位进行平移,使零相位两端的相位幅值尽可能接近相等,以达到减小陀螺零位电压信号相位的目的,其电路如图5中虚线框中所示,包括移相电容c
1*
,c
1*
的一端接在电阻r
1*
与绕组l1之间,c
1*
的另一端接在电阻r
10*
与绕组l2之间;通过调整移相电容c
1*
,以平衡绕组l1与绕组l2的电容参数,使两电桥臂电容参数接近一致,以便陀螺零位电压信号的相移相对陀螺信号器输入激磁信号jc的相移接近,从而减小陀螺零位电压信号的相位差。
48.刚度中心调试电路用于使陀螺刚度中心变化尽可能小;本实施例中刚度中心调试电路包括电阻r
1*
和电阻r
10*
,电阻r
1*
的一端同时接梯度电阻r
3*
和电阻r
10*
的一端,电阻r
1*
的另一端同时接绕组l1的一端、调零电阻r
2*
的一端以及移相电容c
1*
的一端;电阻r
10*
的一端同时接梯度电阻r
3*
的一端和电阻r
1*
的一端,电阻r
10*
的另一端同时接绕组l2的一端、移相电容c
1*
的另一端以及调零电阻r
20*
的一端;通过桥路上的电阻r
1*
与电阻r
10*
进行微调整,使陀螺零位电压信号对陀螺转子转速的微变化不敏感,从而通过电路微调,达到弥补陀螺动力调谐微误差的目的。考虑到调整桥路上的电阻r
1*
与电阻r
10*
会使桥路两桥臂参数不一致,从而引起陀螺常值的较大变化,因此本发明引入了由调零电阻r
2*
与r
20*
构成的调零电路,在刚度中心调试之前先通过调零使两桥臂的信号器绕组l1与l2参数一致,从而确保了两桥臂的电阻电感乘积相等,即使得刚度中心调试的调试不会引起陀螺常值的较大变化。
49.信号放大电路用于对信号器差动桥路电路输出的经调零、调相位、调刚度后的陀螺零位输出电压放大,其电路如图7所示,包括仪表运算放大器n1和电阻r4,电阻r4的两端分别接运算放大器n1的两个rg端(基准端)。仪表运算放大器n1接入电阻r4后对经过前期调理的陀螺零位电压信号进行精密放大,使其信号具有较高的稳定性,确保了陀螺仪输出信号的准确性,为后续电路滤波解调及校正反馈提供了基准。
50.梯度调试电路用于对信号放大电路输出的放大后的陀螺零位电压信号进行批一致性调整,确保批生产陀螺仪具有较好的互换性,本实施例中梯度调试电路如图6中虚线框所示,包括分压电阻r
3*
,分压电阻r
3*
的一端接激磁端jc,另一端同时接电阻r
1*
和r
10*
的一端。一般情况下,陀螺零位输出电压信号在经过调零、移相、刚度中心调试后会变大且离散,影响批生产的一致性。通过调整分压电阻r
3*
的阻值,使其对激磁电压进行一定量值的分压,以此来改变信号器感应信号幅值大小,实现陀螺梯度的批一致性(信号放大电路输出的电压信号大小与陀螺输入速率的比值即为陀螺梯度(单位为mv/(
°
/s))。信号器绕组l1与绕组l2在输入激磁信号jc后所敏感的工作气隙磁阻变化比例电压经调理放大,其输出梯度一致。
51.本发明的具体调理方法是:
52.1、调零:
53.调整调零电阻r
2*
、r
20*
的阻值,使陀螺信器两绕组l1与l2参数相等,以达到电气零位与机械零位重合,零位的差动输出尽可能小;具体方法为:
54.先不接调零电阻r
20*
,调节调零电阻r
2*
的阻值,使得信号器差动桥路电路输出的陀螺零位电压信号与机械零位标定时的陀螺零位电压信号一致;若不能调节为一致,则去掉调零电阻r
2*
,接上调节调零电阻r
20*
并调节其阻值,直至信号器差动桥路电路输出的陀螺零
位电压信号与机械零位标定时的陀螺零位电压信号一致。本过程也可以先不接调零电阻r
2*
,通过调节调零电阻r
20*
的阻值,使得信号器差动桥路电路输出的陀螺零位电压信号与机械零位标定时的零位电压信号一致;若不能调节为一致,则去掉调零电阻r
20*
,接上调零电阻r
2*
并调节其阻值,直至信号器差动桥路电路输出的陀螺零位电压信号与机械零位标定时的陀螺零位电压信号一致。
55.2.相位调试:
56.调整移相电容c
1*
的容值,以平衡绕组l1与绕组l2的电容参数,从而达到对陀螺零位电压信号的相位进行平移,使陀螺零位电压信号的正负相位对称(压高拉低),减小陀螺零位电压信号的相位差。具体方法为:
57.用示波器或相位计检测调零后的陀螺零位电压信号相对于信号器输入激磁信号jc的相位变化,调整移相电容c
1*
的容值,直至陀螺零位电压信号的正负相位接近相等,如正相位为25
°
,负相位为180
°‑
25
°
=155
°
。
58.3.刚度中心调试:
59.调整电阻r
1*
或r
10*
的阻值,使陀螺刚度中心变化尽可能小,以达到刚度中心调试功能,具体方法为:
60.改变电机频率f0(通常改变量为f0的5%~10%),用精密电压表检测频率改变前后陀螺输出零位差值(即陀螺输出零位变化量,通常小于0.05mv/hz),调整电阻r
1*
或r
10*
的阻值,直至频率改变前后陀螺输出零位差值较小(通常小于0.05mv/hz)。
61.4.信号放大;
62.5.梯度调试:
63.调整梯度电阻r
3*
的阻值,使陀螺零位输出电压幅值具有批一致性,确保批生产陀螺仪具有相同的信号梯度,以满足载体系统的使用具有互换性。具体方法为:
64.将陀螺置于速率转台上,敏感轴与速率转台平行,用精密电压表检测陀螺敏感通道的零位电压变化,调整分压电阻r
3*
的阻值,使其对激磁电压进行一定量值的分压,以改变陀螺信号器激磁电流大小,该电流变化引起信号器激磁磁场变化,信号器感应的陀螺零位输出电压幅值随之变化,即陀螺信号器感应电压大小与陀螺输入速率的比值相应得到调整,使得不同批次的陀螺,其经本发明调理放大后最终输出的陀螺零位输出电压与陀螺输入速率的比值的差异在5%以内。
65.6.本发明中涉及的调试具有一定逻辑顺序,顺序错误虽不影响陀螺的正常工作,但无法实现最佳调试,最佳调试顺序为:
66.调零
→
调相移
→
调零
→
调刚度中心
→
信号放大
→
调梯度。
67.其中:
68.调零过程为后续调试建立了陀螺零位输出电压初步基准;
69.调整相移后,由于相位的平移会带来陀螺零位输出电压幅值的变化,需再次调零,重新使陀螺零位输出电压恢复到基准;
70.刚度中心的调整会带来陀螺常值的微小变化,从而牵动陀螺速率梯度发生一定变化;
71.最后,通过信号放大后调梯度,使陀螺批生产过程中速率梯度具有一致性。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。