1.本发明涉及变构型飞行器设计技术领域,尤其是一种不确定条件下的变构型飞行器指令鲁棒优化设计方法。
背景技术:
2.变构型飞行器运行环境更为复杂,难以精确描述其动力学特性,加之各种随机干扰使得模型具有大的不确定性。更为重要的是,变构型飞行器受到结构承载和推进效率的限制,需要对飞行状态尤其是攻角、侧滑角等进行严格约束,同时还应满足舵面饱和、热壅塞等多重约束条件,亟待突破不确定条件下变构型飞行器任务指令的鲁棒优化技术,为工程应用提供有价值的设计方法。
3.变构型飞行器任务包线更大,系统存在明显的多约束强耦合关系,同时飞行器受到外界强不确定扰动的影响,模型参数易变,标称情况下的优化结果往往不满足于实际的性能需求。
技术实现要素:
4.本发明所要解决的技术问题在于,提供一种不确定条件下的变构型飞行器指令鲁棒优化设计方法,量化不确定性的影响,将变构模型参数的不确定性融入到优化设计中形成迭代,获得飞行器的任务指令,满足变构型飞行器不确定条件下的复杂任务要求。
5.为解决上述技术问题,本发明提供一种不确定条件下的变构型飞行器指令鲁棒优化设计方法,包括如下步骤:
6.步骤1、设计飞行器变构型调节策略,构建飞行器动力学模型,采用模型敏感度分析方法,确定飞行器变构型调节的代理模型;
7.步骤2、量化飞行过程中的不确定项,表征飞行器模型不确定性的传播方式,推演出变构型飞行器不确定性的具体形式;
8.步骤3、确定变构型飞行器优化性能指标,构建出变构型飞行器模型特性对闭环极限性能的约束关系,设计变构型飞行器指令的分层迭代策略,解算出不确定性条件下变构型飞行器的任务指令;
9.步骤4、采用数值仿真验证变构型飞行器所获得任务指令的有效性。
10.优选的,步骤1中,设计飞行器变构型调节策略,构建飞行器动力学模型,采用模型敏感度分析方法,确定飞行器变构型调节的代理模型具体包括如下步骤:
11.步骤11、针对飞行器构型,给出飞行过程中的动压、过载和热流多约束条件,采用工程估算方法估算飞行器的气动力,对飞行器几何外形进行网格划分,生成若干面元,据飞行状态,面元参数以及激波/膨胀波理论获得的各面元的来流参数,以及面元距前缘距离和非稳态速度面元数据,得到每个面元上总气动力和总压,对所有面元的力和力矩进行求和,计算出最终的气动力和力矩;
12.确定飞行器飞行过程的受力与力矩同变构型参数与飞行状态之间的函数关系,结
合拉格朗日方程、虚功原理和密歇尔斯基等式,构建变构型飞行器的动力学模型,
[0013][0014][0015]
式中,v和ω分别为飞行器的线速度和角速度,m和j分别表示质量和转动惯量矩阵,f和m为飞行器的气动力和力矩,δ是构型参数;
[0016]
步骤12、针对构建的变构型飞行器模型数据库和非线性数学模型,采用拉丁超方采样方法,优选模型数据库中合理的样本点,通过改变数据排列顺序提高采样性能,进而对样本势能进行优化,引入物理中电场电势的含义,通过整个样本空间内的电势大小ee进行评价
[0017][0018]
其中:ns为样本空间的容量,si,sj分别表示第i个和第j个样本点,基于电势大小的输出值,实现最优正交拉丁超方采样;
[0019]
步骤13、针对采样出的变构型飞行器模型数据,采用灵敏度分析方法,确定特征向量灵敏度矩阵se,根据灵敏度矩阵中的元素幅值判断表征系统状态与运动模态间的关系,提炼与飞行器飞行过程相关的主要影响参数,采用极大似然辨识方法,选取使似然函数l(θ)达到最大的参数值θ,作为参数θ的估计值,确定变构型飞行器代理模型结构,将飞行器复杂的气动力、力矩和推力表达式表示成关于飞行状态与变构型调节参数的函数,推演出变构型飞行器代理模型形式,以升力系数c
l
和阻力系数cd为例,表示为:
[0020][0021][0022]
其中为升力相关的模型系数,为阻力相关的模型系数,这些模型系数是构型参数δ的函数;
[0023]
步骤14、评估变构型飞行器不同速域范围内模型动态特性之间的相似性,依据相似性准则整合不同区域的模型,将飞行器算力模型表达式的待定系数表示成变构型调节参数的函数,确定融合变构调节参数的线性变参模型,
[0024][0025]
其中,x为状态变量;y为输出变量;u为输入变量;状态矩阵a,b以及输入矩阵c,d会随着高度h与马赫数ma而发生变化;
[0026]
步骤15、采用模态分析和闭环极限理论和方法,当特征向量灵敏度矩阵一列中的元素小于该列最大元素的10%时,便将该元素对应的状态视为无关状态,对变构型飞行器动力学模型的平衡状态和动态特性进行折衷分析,静态特性包括配平状态和配平输入等,动态特性包括系统稳定性、零极点位置,估算飞行器的可控安全边界。
[0027]
优选的,步骤2中,量化飞行过程中的不确定项,表征飞行器模型不确定性的传播方式,推演出变构型飞行器不确定性的具体形式具体包括如下步骤:
[0028]
步骤21、采用广义混沌多项式量化飞行过程中的不确定性,基于伽辽金理论将混
沌多项式表示的不确定扰动引入到飞行器模型中,得到不确定条件下的混沌多项式展开
[0029][0030]
其中,i=1,2,
…
,ny,ny是输出响应yi中变量的个数,ε为随机气动摄动变量(ε=[ε1,
…
,εd],d为随机变量的维数),为第i个输出响应的多项式展开系数,而ψj为第i个输出响应的混沌多项式;对于存在多维和混合分布的不确定项,如果它们是相互独立的,则概率密度分布为每个随机变量概率密度分布函数的乘积,如果不确定项存在两个相互关联的分量,采用纳塔夫方法进行转换,以随机变量的边缘累积分布函数和协方差矩阵为基本信息,将相关非正态随机变量直接转换为独立标准正态随机变量;
[0031]
步骤22、采用截断误差作为指标,利用谱分解等理论自适应更新混沌多项展开式的基函数,当截断误差超过阈值时,混沌多项展开式使用的基将自适应地更新,将变构型飞行器考虑不确定性的模型组转换为等价的增广模型形式,对对随机变量进行采样得到有
[0032][0033]
其中,x为飞行状态,s=1,2,
…
,ns,ns为采样点个数,从而将不确定性建模问题转变为确定的增广建模问题;
[0034]
步骤23、将变构型飞行段的多约束条件转换为增广模型的等价约束,采用能量状态法获得多约束条件下变构型飞行器的可行区域,将速度、高度、轨迹角和质量作为状态变量,将迎角和舵面作为控制变量,总能量可以看作是系统连续的状态变量,以飞行器可行区域边界对应的是飞行器能量状态变化率为0,通过计算能量状态变化率来确定飞行器可行区域。
[0035]
优选的,步骤3中,确定变构型飞行器优化性能指标,构建出变构型飞行器模型特性对闭环极限性能的约束关系,设计变构型飞行器指令的分层迭代策略,解算出不确定性条件下变构型飞行器的任务指令具体包括如下步骤:
[0036]
步骤31、根据最小期望/协方差,结合指标加权策略,确立多约束条件下变构型飞行器指令优化的性能指标;具体为:分析变构型飞行器模型耦合特性,综合稳定性、控制精度、鲁棒性要求,根据最小期望/协方差,结合指标加权策略,确立多约束条件下飞行器指令优化的性能指标,描述如下:
[0037][0038]
式(1)中,是优化的目标函数,由状态变量组成的向量,和给出了状态变量的约束范围,p是需要优化的指令,考虑到不确定性会存在于状态变量中或目标函数的输出中,采用鲁棒优化方法,构造关于原优化目标函数f的适应度函数f,即
[0039][0040]
式(2)中,fn为基于适应度函数鲁棒性能指标,n是不确定性参数的数量,设计变量的约束不变,而和描述了不确定性的约束,是不确定性参数p的所有可能情况的集合,由p
ub
和p
lb
分别定义了上界和下界,是一个在中满足一定分布规律λ(p
lbn
,p
ubn
)的随机参数,采用鲁棒正则化方法,构造如下的适应度函数:
[0041][0042]
式(3)中,δ是不确定性影响下指令关于标称位置的偏移量,而φ(δ)是飞行器指令关于标称位置偏移量的概率密度函数;
[0043]
步骤32、根据飞行器不确定性与性能指标的关联分析,选取性能指标的权重系数,采用概率密度函数衡量不同类型不确定项对指标的影响程度,确定出的性能指标为
[0044]
minj=ω
μjμ
ω
σjσ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0045]
其中,j
μ
和j
σ
为性能指标的均值和方差对应的权重值;
[0046]
步骤33、通过分析变构型飞行器性能要求之间的耦合特性,构建指令的分层优化策略,优化问题可以表示如下:
[0047]
minj(p,k,r)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0048]
其中,j表示目标函数,优化的目标是使得目标函数值取得最小。p,k,r为设计变量,即在优化设计过程中可以被用户控制的变量:p为构型参数,k为输入指令参数,r为状态参数,分层优化是将优化问题进行拆分若干个子系统,首先完成对一个子系统的优化,之后将最优的参数代入到下一步进行优化,获得不确定性条件下满足多约束条件的飞行器任务指令。
[0049]
优选的,步骤4中,采用数值仿真验证变构型飞行器所获得任务指令的有效性具体包括如下步骤:
[0050]
步骤41、针对给定标称状态下,对任务指令进行分析,评估标称状态下任务优化的有效性,构建飞行器构型参数与闭环性能可达边界的映射关系,通过改变构型参数,分析闭环性能,验证标称状态下变构型设计的有效性;
[0051]
步骤42、在强不确定的严苛条件下,对变构型飞行器模型参数进行拉偏,通过蒙脱卡洛仿真分析,依靠大量重复的仿真实验来,分析不同输入条件下,系统输出的变化范围,解算飞行性能是否满足期望的要求,从而验证控制性能增强设计结果的有效性。
[0052]
本发明的有益效果为:采用鲁棒优化方法可使飞行器在执行不同的使命,以及某一使命的各个任务段都具有满意的飞行效能,因而可有效增加航程和节省能耗,同时能够执行多种使命,具有更高的环境适应、应变、攻击和生存能力。
附图说明
[0053]
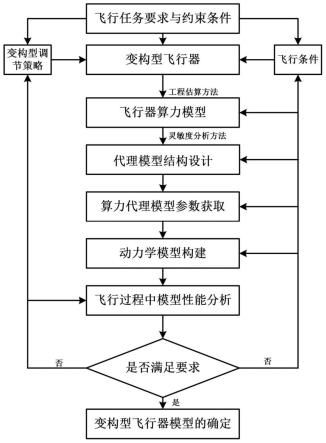
图1为本发明的变构型飞行器建模流程示意图。
[0054]
图2为本发明的变构型飞行器不确定量化与包线走廊确定流程示意图。
[0055]
图3为本发明的变构型飞行器指令的鲁棒优化设计流程示意图。
具体实施方式
[0056]
一种不确定条件下的变构型飞行器指令鲁棒优化设计方法,包括如下步骤:
[0057]
步骤1、设计飞行器变构型调节策略,构建飞行器动力学模型,采用模型敏感度分析方法,确定飞行器变构型调节的代理模型。如图1所示,具体包括如下步骤:
[0058]
(1)针对飞行器典型构型,根据任务需求,设计典型任务的变构型策略,给出飞行过程中的动压、过载和热流等多约束条件,采用工程估算方法构建飞行器的算力数据库,确定飞行器飞行过程中的受力与力矩同变构型参数与飞行状态之间的函数关系,结合拉格朗日方程、虚功原理和密歇尔斯基等式,构建变构型飞行器的动力学模型。
[0059]
(2)针对构建的变构型飞行器模型数据库和非线性数学模型,采用拉丁超方采样方法优选模型数据库中合理的样本点通过改变数据排列顺序提高采样性能,进而对样本势能进行优化,实现最优正交拉丁超方采样。
[0060]
(3)针对采样出的变构型飞行器模型数据,采用灵敏度分析方法,提炼与飞行器飞行过程相关的主要影响参数。采用极大似然辨识方法,确定变构型飞行器代理模型结构,将飞行器复杂的气动力、力矩和推力表达式表示成关于飞行状态与变结构调节参数的函数,推演出变构型飞行器代理模型形式。
[0061]
(4)评估变构型飞行器不同包线范围内模型动态特性之间的相似性,依据相似性准则整合不同区域的模型,将飞行器算力模型表达式的待定系数表示成变构型调节参数的函数,确定融合变构型调节参数的代理形式。
[0062]
(5)采用模态分析和闭环极限理论和方法,对变构型飞行器动力学模型的平衡状态和动态特性进行折衷分析,考虑飞行条件、变构型调节和不确定性因素对静态平衡特性(飞行包线、配平舵面、迎角和推力)及动态特性(不稳定极点和右半平面零点)影响,结合对象模型的输入和状态约束条件,对系统特性随飞行状态的变化规律以及闭环性能极限进行了分析,得到飞行器的可控安全边界。
[0063]
步骤2、量化飞行过程中的不确定项,表征飞行器模型不确定性的传播方式,推演出变构型飞行器不确定性的具体形式。
[0064]
该步骤结合混沌多项式扩展法和投影法,对变构型飞行器运动过程存在的不确定性进行量化,应用多元混沌多项式,将飞行器模型的不确定性转化为其等价确定性矩阵,进而采用能量状态法确定变构型飞行器的包线走廊,具体的实施过程如图2所示,包括如下步骤:
[0065]
(1)采用广义混沌多项式量化飞行过程中的不确定性,基于伽辽金理论将混沌多项式表示的不确定扰动引入到变构型飞行器模型中,对于存在多维和混合分布的不确定项,如果它们是相互独立的,则概率密度分布为每个随机变量概率密度分布函数的乘积,如果不确定项存在两个相互关联的分量,可以采用纳塔夫方法进行转换。
[0066]
(2)采用截断误差作为指标,利用谱分解等理论自适应更新混沌多项展开式的基
函数,将变构型飞行器考虑不确定性的模型组转换为等价的增广模型形式。
[0067]
(3)将变构型飞行过程中的多约束条件转换为增广模型的等价约束,采用能量状态法获得不确定条件下变构型飞行器的包线走廊。
[0068]
步骤3、确定变构型飞行器优化性能指标,构建出变构型飞行器模型特性对闭环极限性能的约束关系,设计变构型飞行器指令的分层迭代策略,解算出不确定性条件下变构型飞行器的任务指令。
[0069]
具体的实施过程如图3所示,包括如下步骤:
[0070]
(1)分析变构型飞行器模型耦合特性,综合稳定性、控制精度、鲁棒性等要求,根据最小期望/协方差,结合指标加权策略,确立多约束条件下飞行器指令优化的性能指标,可以描述如下:
[0071][0072]
式(1)中,是优化的目标函数,由状态变量组成的向量,和给出了状态变量的约束范围,p是需要优化的指令。考虑到不确定性会存在于状态变量中或目标函数的输出中,采用鲁棒优化方法,构造关于原优化目标函数f的适应度函数f,即
[0073][0074]
式(2)中,fn为基于适应度函数鲁棒性能指标,n是不确定性参数的数量。设计变量的约束不变,而和描述了不确定性的约束。是不确定性参数p的所有可能情况的集合,由p
ub
和p
lb
分别定义了上界和下界,是一个在中满足一定分布规律λ(p
lbn
,p
ubn
)的随机参数。采用鲁棒正则化方法,构造如下的适应度函数:
[0075][0076]
式(3)中,δ是不确定性影响下指令关于标称位置的偏移量,而φ(δ)是飞行器指令关于标称位置偏移量的概率密度函数。
[0077]
(2)根据飞行器运动过程中的不确定性与性能指标的关联分析,选取性能指标的权重系数,采用概率密度函数衡量不同类型不确定项对指标的影响程度。概率密度函数是对不确定性传播的一种量化,它反映了不确定项在当前时刻的整体分布情况,预测不确定性的传播。
[0078]
(3)通过分析飞行器性能要求之间的耦合特性,构建指令的分层优化策略,获得不确定性条件下满足多约束条件的飞行器任务指令。变构型飞行器任务指令的鲁棒优化策略,通过耦合特性分析与优化策略的选取,降低变构型飞行器多变量多目标优化问题的复杂性,解决优化过程中的迭代效率低甚至无解的问题,提高不确定性条件下飞行器指令获取效率。
[0079]
步骤4、采用数值仿真验证变构型飞行器所获得任务指令的有效性。具体包括如下
步骤:
[0080]
(1)针对给定标称状态下,对任务指令进行分析,评估标称状态下任务优化的有效性。
[0081]
(2)在强不确定的严苛条件下,对变构型飞行器模型参数进行拉偏,通过蒙特卡洛仿真分析,验证所获得结果的有效性。
[0082]
本发明给出一种不确定条件下变构型飞行器的鲁棒优化设计方法,量化不确定性的影响,将变构模型参数的不确定性融入到优化设计中形成迭代,获得飞行器的任务指令,满足变构型飞行器不确定条件下的复杂任务要求。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。