技术特征:
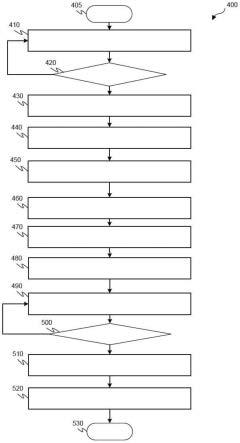
1.一种按需自主(oda)系统,包括跟随车辆(fv)、引导车辆(lv)和oda服务器,所述引导车辆包括用于在队列行程启动后支持编队的控制器,所述控制器包括非暂时性计算机可读介质和一个或多个处理器,所述一个或多个处理器通过所述非暂时性计算机可读介质上的编程指令被配置为:接收来自所述fv的对oda服务的请求,其中所述请求包括所述fv的位置;当所述lv在所述fv的所述位置的第一距离内时:在所述lv的环境的场景内识别所述fv;在所述lv的所述环境的所述场景内识别所述fv的方位;以及为所述lv确定第二位置以开始所述oda服务;当所述lv在所述第二位置的第二距离内时,在所述lv的所述环境的第二场景内确定其他车辆的接近度;在所述第二场景中确认所述fv的所述方位;与所述fv执行握手法,以创建所述lv与所述fv之间的虚拟链路;以及使用所创建的虚拟链路执行牵引和泊车编队方法中的至少一种。2.根据权利要求1所述的系统,其中所述控制器还被配置为基于从所述lv的传感器生成的传感器数据来确定所述环境的所述场景。3.根据权利要求1所述的系统,其中所述控制器被配置为基于机器学习模型和与所述fv相关联的参数来识别所述fv。4.根据权利要求3所述的系统,其中所述控制器被配置为基于第二机器学习模型和指示泊车类型的地图数据来识别所述fv的所述方位。5.根据权利要求1所述的系统,其中所述控制器被配置为基于机器学习模型、部分可观察马尔可夫决策过程模型、地图数据和交通数据中的至少一种来确定所述第二位置。6.根据权利要求4所述的系统,其中所述控制器被配置为基于第二机器学习模型和所述fv的参数,在所述第二场景中确认所述fv的所述方位。7.根据权利要求1所述的系统,其中所述握手法在所述lv与所述fv之间建立安全通信链路。8.根据权利要求7所述的系统,其中所述握手法基于来自所述lv的通信来确认所述fv的控制功能。9.根据权利要求8所述的系统,其中所述握手法基于对所述lv的场景进行分析的机器学习模型来确认所述控制功能。10.一种按需自主(oda)系统中的方法,所述系统包括跟随车辆(fv)、引导车辆(lv)和odas,所述方法包括:接收来自所述fv的对oda服务的请求,其中所述请求包括所述fv的位置;当所述lv在所述fv的所述位置的第一距离内时:在所述lv的环境的场景内识别所述fv;在所述lv的所述环境的所述场景内识别所述fv的方位;以及为所述lv确定第二位置以开始所述oda服务;当所述lv在所述第二位置的第二距离内时,在所述lv的所述环境的第二场景内确定其他车辆的接近度;
在所述第二场景中确认所述fv的所述方位;与所述fv执行握手法,以创建所述lv与所述fv之间的虚拟链路;以及使用所创建的虚拟链路执行牵引和泊车编队方法中的至少一种。
技术总结
提供了用于按需自主(ODA)系统的方法和系统。该方法包括:接收来自Fv的对ODA服务的请求,其中该请求包括Fv的位置;当Lv在Fv的位置的第一距离内时:在Lv的环境的场景内识别Fv;在Lv的环境的场景内识别Fv的方位;以及为Lv确定第二位置以开始ODA服务;当Lv在第二位置的第二距离内时:在Lv的环境的第二场景内确定其他车辆的接近度;在第二场景中确认Fv的方位;与Fv执行握手法,以创建Lv与Fv之间的虚拟链路;以及使用所创建的虚拟链路执行牵引和泊车编队方法中的至少一种。编队方法中的至少一种。编队方法中的至少一种。
技术研发人员:P
受保护的技术使用者:通用汽车环球科技运作有限责任公司
技术研发日:2022.05.25
技术公布日:2023/3/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。