技术特征:
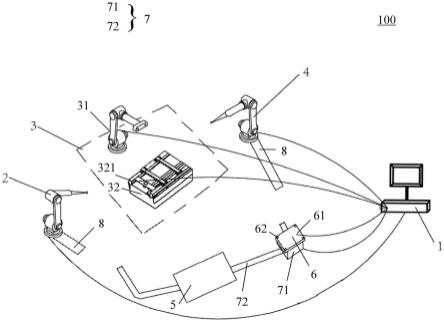
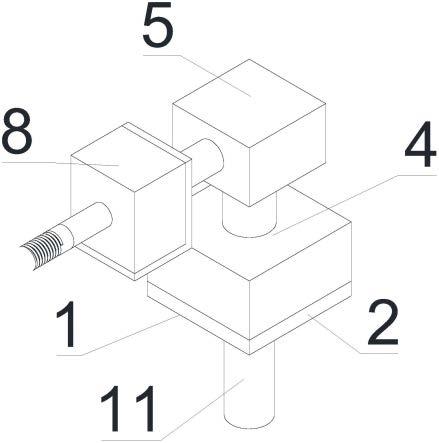
1.一种焊接质量自动检测工位,其特征在于,包括:总控装置(1)、上件机器人(2)、检测工位(3)、下件机器人(4)、移动驱动机构(7)、中转台(6)和返修台(5);所述检测工位(3)设置有用于对工件进行质量检测的测量机器人(31)和用于固定待测工件的测量夹具(32),所述测量机器人(31)设置于测量夹具(32)一侧,所述上件机器人(2)、下件机器人(4)分别设置于检测工位(3)两侧,所述总控装置(1)分别与上件机器人(2)、测量机器人(31)和下件机器人(4)电连接,分别控制其进行所述待测工件的上件、测量及下件工作;所述移动驱动机构(7)包括驱动器(71)和第一轨道(72),所述中转台(6)设置在所述驱动器(71)上,在所述驱动器(71)的驱动下所述中转台(6)沿着所述第一轨道(72)在上件机器人(2)的抓/放件区域、返修台(5)和下件机器人(4)的抓/放件区域之间循环运动,所述总控装置(1)与所述驱动器(71)电连接,用于控制所述驱动器(71)的启停;所述返修台(5)上设有控制键,所述控制键与总控装置(1)电连接,用于向总控装置(1)反馈检修工作已完成的信号。2.如权利要求1所述的自动检测工位,其特征在于,所述测量夹具(32)的支撑面上设有第一传感器,所述中转台(6)的支撑面上设有第二传感器,所述第一传感器和所述第二传感器与所述总控装置(1)电连接,所述第一传感器用于向所述总控装置(1)反馈所述测量夹具(32)上是否放置有所述待测工件,所述第二传感器用于向所述总控装置(1)反馈所述中转台(6)上是否放置有完成测量的工件。3.如权利要求2所述的自动检测工位,其特征在于,所述第一传感器和所述第二传感器为距离传感器或重力传感器。4.如权利要求1所述的自动检测工位,其特征在于,所述中转台(6)的四角分别设置有四个雷达(62),通过所述雷达判断辐射范围内是否存在障碍物。5.如权利要求1所述的自动检测工位,其特征在于,所述上件机器人(2)和下件机器人(4)底部均设有第二轨道(8),上件机器人(2)和下件机器人(4)能够在所述第二轨道(8)上移动。6.如权利要求1所述的自动检测工位,其特征在于,所述检测工位(3)设置有两组或多组。7.如权利要求1-6中任一项所述的自动检测工位,其特征在于,所述总控装置(1)为可编程控制器或分布式控制系统。
技术总结
本实用新型涉及一种焊接质量自动检测工位,包括总控装置(1)、上件机器人(2)、检测工位(3)、下件机器人(4)、移动驱动机构(7)、中转台(6)和返修台(5);检测工位(3)包括测量机器人(31)和测量夹具(32),总控装置(1)分别与上件机器人(2)、测量机器人(31)和下件机器人(4)电连接,分别控制其进行待测工件的上件、测量及下件工作;移动驱动机构(7)包括驱动器(71)和第一轨道(72),中转台(6)设置在驱动器(71)上,中转台(6)沿着第一轨道(72)在上件机器人(2)的抓/放件区域、返修台(5)和下件机器人(4)的抓/放件区域之间循环运动。实现了自动化检测,提高了安全性及工作效率。提高了安全性及工作效率。提高了安全性及工作效率。
技术研发人员:李龙涛 梁佳春 沈天昊 曹骅 韩雨婷 侯健 于浩波
受保护的技术使用者:上汽大众汽车有限公司
技术研发日:2022.08.24
技术公布日:2023/3/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。