一种用于吸附pcb板的吸附结构以及转移装置
技术领域
1.本实用新型涉及pcb板生产技术领域,具体为一种用于吸附pcb板的吸附结构以及转移装置。
背景技术:
2.pcb板在生产完成后,需要从生产线转移至存放的治具中,目前一般采用吸盘组件进行抓取,如专利号为:cn201822205408.9,名称为:用于pcb翻板机的pcb板转移装置;该专利文献记载的pcb板抓取机构包括抓取臂,抓取臂设置有吸盘;通过吸盘吸附pcb板实现对pcb板的抓取;由于在实际生产过程中,pcb板的型号较多,尺寸各不相同;因此需要对吸盘的位置进行调节,以及增加、减少吸盘的数量;由于抓取臂为固定结构,不方便进行位置调整以及数量上的更改,尤其是增加抓取臂的数量。因此需要设计一款能够适应多数尺寸pcb板的转移装置。
技术实现要素:
3.本实用新型的目的在于解决现有技术的不足,提供一种用于吸附pcb板的吸附结构,该吸附结构可以对多种型号的pcb板进行吸附,操作方便。
4.本实用新型的另一目的在于:提供一种转移装置,该转移装置具有上述的吸附结构。
5.一种用于吸附pcb板的吸附结构,其包括基板,所述基板设有n行m列个连接孔,所述基板的下端两侧分别连接有t个和s个吸附单元,所述吸附单元包括连接块,连接块设有连接槽,连接块通过连接件穿过连接槽以及连接孔与基板固定连接;连接块的一端伸出基板并设有安装孔,安装孔内连接有吸附管,吸附管的下端连接有吸盘,吸附管的上端连接有接头并通过接头与抽气装置连接,t、s、n、m均为自然数且大于1。
6.进一步地,吸附管连接有两个调节螺母,两个调节螺母分别位于连接块的两侧。
7.进一步地,连接槽与至少2个连接孔相对应。
8.进一步地,基板连接有感应单元,所述感应单元包括与基板连接的固定块,固定块的一端伸出基板并连接有竖直块,竖直块连接有高度调节片,高度调节片连接有感应器,竖直块弹性连接有与感应器相配合的感应杆;当感应杆与pcb板抵接时,感应杆触发感应器;当pcb板与感应杆分离时,感应杆复位。
9.进一步地,所述固定块的中部设有调节槽,调节槽内设有连接件并通过连接件与基板固定连接,所述竖直块设有上竖直槽,上竖直槽也设有连接件,该连接件的一端穿过竖直槽与固定块固定连接;所述高度调节片设有下竖直槽,下竖直槽内设有连接件并通过该连接件与竖直块固定连接。
10.优选地,所述竖直块的一端向外延伸有凸块,所述感应杆包括上圆柱段和下圆柱段,上圆柱段的外径大于下圆柱段的外径;凸块设有与下圆柱段相配合的穿孔,所述弹性件固定于下圆柱段并与凸块的下端面相抵。
11.一种pcb板转移装置,其包括:上述的吸附结构,以及用于驱动该吸附结构转移的转移单元。
12.进一步地,所述转移单元包括机器人,机器人设有旋转输出轴,旋转输出轴连接有法兰,所述基板的中部连接有竖直连接块,竖直连接块的上端连接有转移块,所述法兰固定于转移块。
13.进一步地,所述转移块的一端连接有竖直底板,竖直底板连接有升降气缸,升降气缸连接有l形固定块,l形固定块的水平段连接有若干个抵接脚以及旋转电机,旋转电机驱动连接有旋转盘,旋转盘的下端连接有拨扣。
14.与现有技术相比,本实用新型的有益效果是:通过在基板上设置n行m列连接孔,基板下端两侧可以根据需要分别连接t、s个吸附单元,同时可以对吸附单元的位置进行调整,以适应各种型号的pcb板。
附图说明
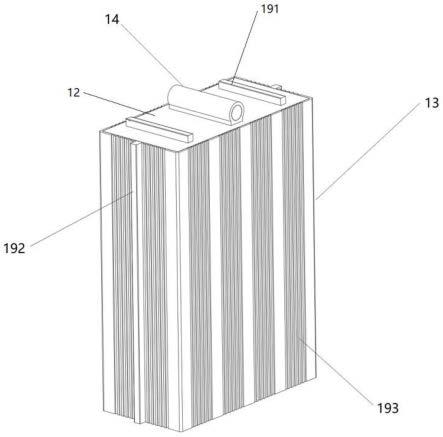
15.图1为本实用新型吸附结构的示意图。
16.图2为本实用新型吸附结构的第二种视角示意图。
17.图3为本实用新型吸附结构的第三种视角示意图。
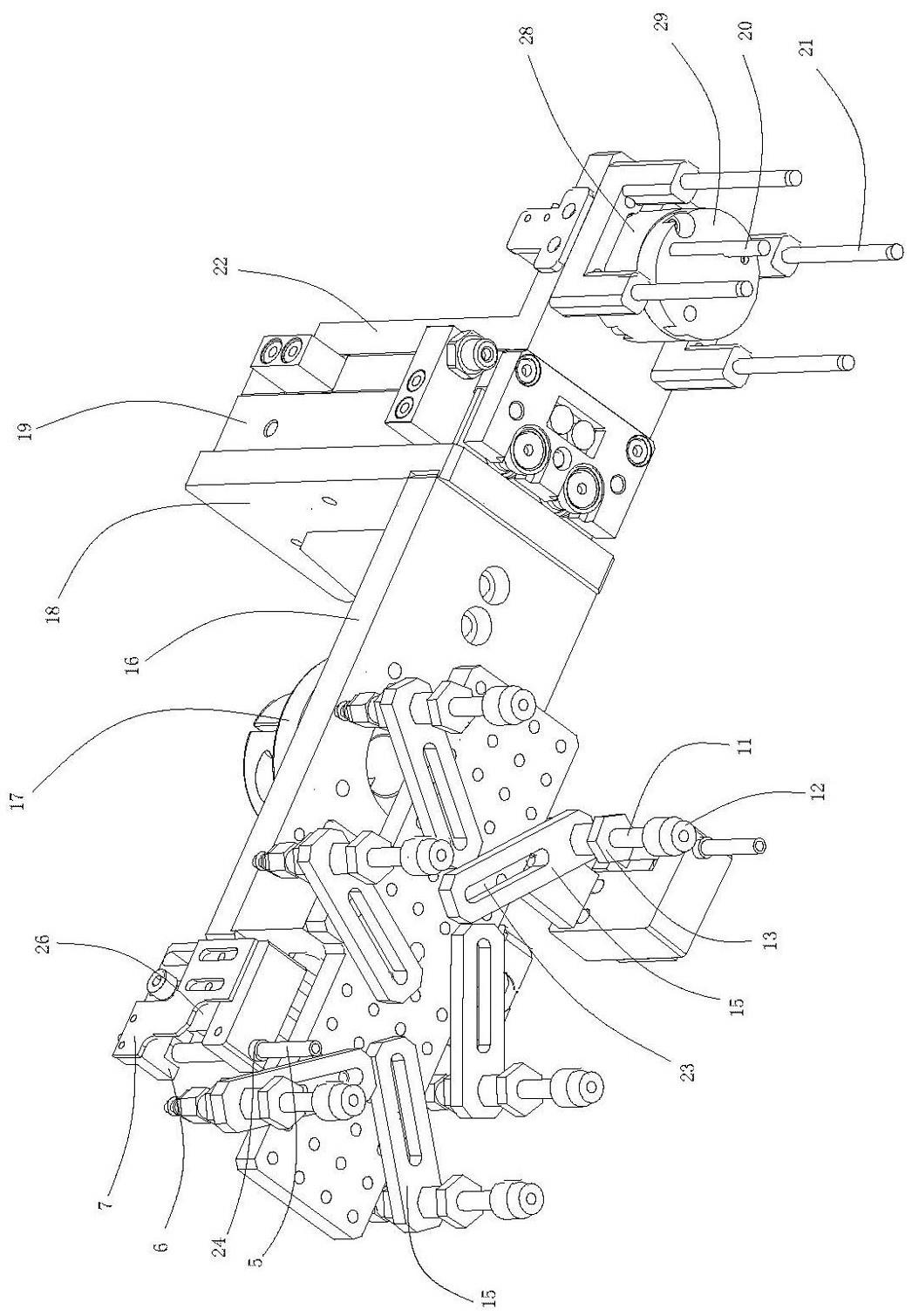
18.图4为本实用新型转移装置的第二种视角示意图。
19.附图标记:
20.1——基板;2——连接孔;3-——固定块;4——调节槽;5——感应杆;6——感应器;7——高度调节片;8——上竖直槽;9——竖直连接块;10——pcb板;11——吸附管;12——吸盘;13——调节螺母;15——连接块;16——转移块;17——法兰;18——竖直底板;19——升降气缸;20——拨扣;21——抵接脚;22——l形固定块;23——连接槽;24——弹性件; 26——竖直块;27——凸块;28——旋转电机;29——旋转盘;30——机器人;31——旋转输出轴;32——接头。
具体实施方式
21.下文结合附图图1至图4和具体实施例对本实用新型的技术方案做进一步说明。
22.实施例一:一种用于吸附pcb板的吸附结构,其包括基板1,所述基板1设有n行m列个连接孔2,所述基板1的下端两侧分别连接有t个和s个吸附单元,所述吸附单元包括连接块15,连接块15设有连接槽23,连接块15通过连接件穿过连接槽23以及连接孔2与基板1固定连接;连接块15的一端伸出基板1并设有安装孔,安装孔内连接有吸附管11,吸附管11的下端连接有吸盘12,吸附管11的上端连接有接头32并通过接头32与抽气装置(未画出)连接,t、s、n、m均为自然数且大于1。
23.本技术方案在工作时,根据pcb板10的型号尺寸设计相符合的t、s参数,t、s可以相等或不等;对于非规则或非对称型的pcb板10,t、s可以不同;其次,每个吸附单元的连接块15伸出基板1的长度、角度等也可以不同,以达到每个吸附单元均能够对pcb板10进行吸附,且总体能够将pcb板10吸附。连接块15在与基板1连接时,连接件可以为螺栓,螺栓与螺母配合,螺栓的一端穿过连接槽23、连接孔2并与螺母连接,将连接块15固定于基板1。t、s、n、m可以分别为:2、3、4、5、6、7等中的任一。抽气装置可以为现有技术,如接头32通过管道与抽气
泵连接。抽气装置在图中未画出。吸盘12也可以为现有技术。
24.进一步地,吸附管11连接有两个调节螺母13,两个调节螺母13分别位于连接块15的两侧。
25.设置2个调节螺母13,1、通过夹持可以将吸附管11固定于连接块15。2、可以对吸附管11的连接位置进行调整;进而调整吸盘12的高度。调节时,可以将两个调节螺母13同时或分别向上或向下转动即可。
26.参见图2;进一步地,连接槽23与至少2个连接孔2相对应。
27.连接槽23与至少2个连接孔2相对应时,连接块15可以通过至少2个连接件与基板1连接,从而可以防止通过单连接件连接时,出现连接块15晃动的情况发生。
28.进一步地,基板1连接有感应单元,所述感应单元包括与基板1连接的固定块3,固定块3的一端伸出基板1并连接有竖直块26,竖直块26连接有高度调节片7,高度调节片7连接有感应器6,竖直块26弹性连接有与感应器6相配合的感应杆5;当感应杆5与pcb板10抵接时,感应杆5触发感应器6;当pcb板10与感应杆5分离时,感应杆5复位。
29.设置感应单元,用于监测是否将pcb板10吸附;在工作时,1、吸附单元对pcb板10进行吸附,pcb板10向上移动并与吸附单元的吸盘12抵接,同时pcb板10碰到感应杆5,并驱动感应杆5稍稍向上移动,感应杆5触发感应器6;2、吸附单元停止对pcb板10吸附,pcb板10在自身重力下与吸附单元分离,同时也与感应杆5分离,感应杆5由于与固定块3弹性连接,感应杆5也自动复位。感应器6可以为接近开关、霍尔感应器6等。通过触发感应器6,来获知pcb板10是否被吸附以及分离等。保证工作的顺利进行,避免误判。在具体实施时,感应单元的感应器6与pcb板10转移装置的控制单元电连接,控制单元可以pic、工控机等;控制单元与pcb板10转移装置的执行单元电连接,执行单元包括电机、抽气装置等。此为现有技术不在赘述。
30.进一步地,所述固定块3的中部设有调节槽4,调节槽4内设有连接件并通过连接件与基板1固定连接,所述竖直块26设有上竖直槽8,上竖直槽8也设有连接件,该连接件的一端穿过竖直槽与固定块3固定连接;所述高度调节片7设有下竖直槽,下竖直槽内设有连接件并通过该连接件与竖直块26固定连接。
31.固定块3的中部设置调节槽4,可以调整固定块3与基板1的固定位置,即调整固定块3伸出基板1的长度,调整感应杆5的水平位置。竖直块26设置上竖直槽8,高度调节片7设置下竖直槽,上竖直槽8、下竖直槽可以综合调整感应杆5的高度。
32.优选地,所述竖直块26的一端向外延伸有凸块27,所述感应杆5包括上圆柱段和下圆柱段,上圆柱段的外径大于下圆柱段的外径;凸块27设有与下圆柱段相配合的穿孔,所述弹性件24固定于下圆柱段并与凸块27的下端面相抵。
33.为方便连接感应杆5,将感应杆5设置为两部分,下圆柱段与凸块27的穿孔配合,感应杆5能相对凸块27进行升降移动,将弹性件24固定于下圆柱段,当吸盘12吸附pcb板10时,pcb板10与感应杆5碰撞,感应杆5发生移动,弹性件24发生变形,感应杆5触发感应器6。当吸盘12释放pcb板10,感应杆5在弹性件24作用下复位,感应杆5同样触发感应器6。
34.弹性件24可以为弹簧或弹片等,采用弹性件24可以保持感应杆5向下移动的趋势,以方便感应杆5复位。此为现有技术不再赘述。
35.实施例2:参见图4,一种pcb板10转移装置,其包括:上述的吸附结构,以及用于驱
动该吸附结构转移的转移单元。
36.转移单元可以为xyz轴移动机构、或xy轴移动机构等,可以为现有技术。在工作时,通过吸附结构对pcb板10进行吸附,然后转移单元对吸附结构进行转移,从而实现对pcb板10的转移。
37.参见图4,进一步地,所述转移单元包括机器人30,机器人30设有旋转输出轴31,旋转输出轴31连接有法兰17,所述基板1的中部连接有竖直连接块159,竖直连接块159的上端连接有转移块16,所述法兰17固定于转移块16。
38.采用机器人30作为转移主体,可以进行多维度的转移;为了不干扰吸附单元作业,转移块16通过竖直连接块159与基板1固定连接。
39.参见图2、图3;进一步地,所述转移块16的一端连接有竖直底板18,竖直底板18连接有升降气缸19,升降气缸19连接有l形固定块22,l形固定块22的水平段连接有若干个抵接脚21以及旋转电机28,旋转电机28驱动连接有旋转盘29,旋转盘29的下端连接有拨扣20。
40.目前存放pcb板10的治具,一般是在治具中部设置放置槽,在放置槽的一侧设置l形的拨扣筒,l形的拨扣筒与治具转动连接,待到pcb板10放置于放置槽中后,拨动拨扣筒,拨扣筒的一端位于pcb板10上,将pcb板10限位于放置槽。转移块16的一端连接竖直底板18以及升降气缸19等,可以辅助将拨扣20拨动,无需人工;工作时,升降气缸19向下移动,抵接脚21与pcb板10抵接,防止pcb板10移动;然后拨扣筒与拨扣20插接,旋转电机28驱动旋转盘29旋转,带动拨扣20旋转,使得拨扣筒的一端位于pcb板10上,最后,升降气缸19复位。
41.上述具体实施例仅仅是本实用新型的几种优选的实施例,基于本实用新型的技术方案和上述实施例的相关启示,本领域技术人员可以对上述具体实施例做出多种替代性的改进和组合。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。