技术特征:
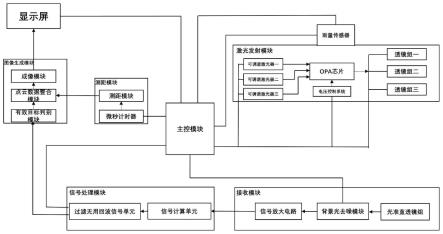
1.一种适用于雨天的车载激光雷达系统,其特征在于,包括:雨量传感器、激光发射模块、接收模块、信号处理模块、测距模块;所述雨量传感器用于探测当前降雨量的大小,并判断降雨量的等级;所述激光发射模块用于按周期交替发射两束不同的激光束,其中激光束a的扫描目标为实时降落的雨滴,激光束b的扫描目标为车前方实时的路况,并根据降雨量的等级控制激光束a和激光束b的发射功率、波长以及发射距离;所述接收模块用于接收激光束反射回来的光信号,并对光信号进行背景光去噪处理;所述信号处理模块用于对所述接收模块输出的回波信号进行处理,根据激光束a的回波信号得到实时雨回波强度数值以及相对应的点云信号,然后剔除激光束b回波信号中的所述实时雨回波强度数值以及相对应的点云信号;所述测距模块用于根据所述信号处理模块输出信息,计算有效目标与车辆的距离。2.根据权利要求1所述的适用于雨天的车载激光雷达系统,其特征在于,所述激光发射模块包括光学相控阵激光雷达芯片以及分别连接所述光学相控阵激光雷达芯片的三个可调谐激光器、三个透镜组;所述三个可调谐激光器用于分别控制输出不同波长及发射功率的激光束;所述三个透镜组用于分别控制输出不同发射距离的激光束。3.根据权利要求2所述的适用于雨天的车载激光雷达系统,其特征在于,根据预先设定的数值范围,将降雨量分为无雨、小雨、中雨、大雨、暴雨五个等级;根据降雨量的大小,降雨量大则对应输出波长长、功率小的激光束a,不同降雨量下的激光束a发射距离不变;根据降雨量的大小,降雨量大则对应输出波长长、功率大、发射距离远的激光束b。4.根据权利要求3所述的适用于雨天的车载激光雷达系统,其特征在于,所述激光发射模块中,所述三个可调谐激光器对应的发射波长范围分别为532-540nm、1064-1070nm、1550-1560nm,发射功率有10mw、20mw、30mw、40mw,所述三个透镜组控制的发射距离分别为50m、100m、150m。5.根据权利要求4所述的适用于雨天的车载激光雷达系统,其特征在于,对于激光束a:降雨量的等级为小雨时,选择可调节激光器一以及透镜组一,使得发射波长为532-540nm,发射功率为40mw,发射距离为50m;降雨量的等级为中雨时,选择可调节激光器一以及透镜组一,使得发射波长为532-540nm,发射功率为30mw,发射距离为50m;降雨量的等级为大雨时,选择可调节激光器二以及透镜组一,使得发射波长为1064-1070nm,发射功率为20mw,发射距离为50m;降雨量的等级为暴雨时,选择可调节激光器二以及透镜组一,使得发射波长为1064-1070nm,发射功率为10mw,发射距离为50m;对于激光束b:降雨量的等级为小雨时,选择可调节激光器二以及透镜组一,使得发射波长为1064-1070nm,发射功率为10mw,发射距离为50m;降雨量的等级为中雨时,选择可调节激光器二以及透镜组二,使得发射波长为1064-1070nm,发射功率为20mw,发射距离为100m;降雨量的等级为大雨时,选择可调节激光器三以及透镜组二,使得发射波长为1550-1560nm,发射功率为30mw,发射距离为100m;降雨量的等级为暴雨时,选择可调节激光器二以及透镜组三,使得发射波长为1550-1560nm,发射功率为40mw,发射距离为150m。6.根据权利要求5所述的适用于雨天的车载激光雷达系统,其特征在于,所述接收模块包括光准直透镜组、背景光去噪模块、信号放大电路;所述光准直透镜组用于对由激光束a和激光束b反射回来的光信号进行准直处理;
所述背景光去噪模块包括可调谐滤波器、四个光电探测器、第一至第三滤光片以及第一至第四控制开关;四个光电探测器并排设置,第一至第三光电探测器的入射端分别设置一个滤光片,第一至第四光电探测器的信号输出端分别通过一个控制开关连接可调谐滤波器的输入端;其中,第一至第三滤光片分别对应波长为532-540nm、1064-1070nm、1550-1560nm;第一至第四控制开关由主控模块控制开启和关闭,在打开时,可调谐滤波器可接收到对应光电探测器输出的信号;具体的,在激光束相邻发射周期的间隔时间内,第四光电探测器连接的第四控制开关开启,第一至第三控制开关关闭,此时第四光电探测器输出的信号仅包括背景光噪信号;然后主控模块根据激光束下一发射周期内发出激光束a和激光束b的波长,按激光束发射时间分别开启相同波长滤光片对应的光电探测器连接的控制开关,即通过滤光片以及开关的作用使得仅有对应波段的探测回波信号及该波段的背景光噪信号能够输入到可调谐滤波器;可调谐滤波器去除第一至第三光电探测器输出信号中与第四光电探测器输出信号同波段的信号,该同波段的信号即为激光束a或激光束b同波段的背景光噪信号,从而实现去除背景光噪的效果;所述信号放大电路用于将去除背景光噪后的电信号进行整形及放大处理。7.根据权利要求1-6任一所述的适用于雨天的车载激光雷达系统,其特征在于,所述信号处理模块包括信号计算单元和过滤无用回波信号单元;所述信号计算单元用于根据所述接收模块输出信号计算得到经背景光去噪后剩余回波信号中每个点云信号对应量化的强度值;所述过滤无用回波信号单元用于所述信号计算单元输出结果作如下处理:步骤一:将所述信号计算单元计算处理后的激光束a的回波点云信号对应量化的强度值与雨回波强度数据库中的数值范围进行对比;步骤二:剔除掉除雨回波强度数值范围以外的所有强度数值以及相对应的点云信号;步骤三:保存剩余点云信号的强度数值,记录为实时雨回波强度数值;步骤四:将所述信号计算单元计算处理后的激光束b的回波点云信号对应量化的强度值与所述实时雨回波强度数值对比,剔除掉回波信号中与所述实时雨回波强度数值相同的值以及相对应的点云信号;其中,所述雨回波强度数据库存储有所述车载激光雷达系统预先测试得出在不同降雨量强度下,激光器处于不同发射波长、发射功率、发射距离状态下的雨回波强度数值。8.根据权利要求1-6任一所述的适用于雨天的车载激光雷达系统,其特征在于,还包括图像生成模块,用于根据所述信号处理模块输出信号,整合有效点云信号的信息后成像。9.根据权利要求8所述的适用于雨天的车载激光雷达系统,其特征在于,所述图像生成模块包括有效目标判别模块、点云数据整合模块以及成像模块;所述目标判别模块用于根据接收到各个点云信号的方向、角度、强度值,进行归类,判定得到若干有效目标;所述点云数据整合模块用于将强度值和有效目标的距离信息整合;所述成像模块用于将整合后的点云数据进行成像处理,最终在显示屏上显示成像与距离。
技术总结
本发明公开了一种适用于雨天的车载激光雷达系统,包括:雨量传感器、激光发射模块、接收模块、信号处理模块、测距模块。本发明通过检测雨天环境下的雨量,根据雨量来调整激光发射模块的配置参数,实现激光束A与激光束B的周期交替发射,并且使激光束A与激光束B在不同降雨量等级的情况下能够更好探测到各自的有用目标,使有用目标产生足够多的回波信号,使系统最终能得到更为精确的点云数据。接着通过信号接收模块以及信号处理模块,对激光束A、激光束B的回波信号中的杂波信号进行分级处理,最终从激光束B产生的回波信号中得到更为精确的有用目标点云信号,最后通过测距模块以及图像生成模块,实现对有用目标清晰成像、精准测距的功能。功能。功能。
技术研发人员:程立文 季张杰 张家荣 陈志朋 刘鹏飞 刘昶 薛礼瑞 马立 蒋晨洁
受保护的技术使用者:扬州大学
技术研发日:2022.12.15
技术公布日:2023/3/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。