1.本发明涉及一种无靶标四目立体视觉系统全局标定方法。
背景技术:
2.在利用摄像机进行立体视觉标定时,常常会有视场范围的限制,相机之间不存在或只存在很小的重叠视场,特别是针对高精度、大视场的工业测量,通常需要多个相机组建一个具有更大视场范围的测量系统,如何对非重叠视场的相机进行高精度的全局标定就成为了多相机测量系统的关键。
3.目前,采用的全局标定方法包括:
4.(1)借助高精度的经纬仪或激光跟踪仪等三维测量设备,直接获得各相机的空间位置,从而将所有相机坐标系统一到同一坐标系下。此方法能达到较高的精度,但是操作过程十分繁琐,在可利用空间较小的工业测量现场有很大的局限性;
5.(2)利用光学特性,如光的折射,建立相应的折射模型,同时需要覆盖标定目标的同一区域;或通过镜面的反射,间接观测公共靶标,但标定精度会随着相机间距离的增加而下降;
6.(3)重构大平面标定物,获取每个小靶标中的局部特征信息,根据小靶标间的相对位置关系,计算各相机间的变换矩阵,但求解中需要获取靶标的多场景信息,且标定结果不够稳定;
7.(4)通过跟踪移动的目标,计算目标退出相机视场和进入另一个相机视场的时间差,从而得到两相机间的位置关系,但标定时需要更多的场景信息,这在工业测量中往往难以获取,并且精度仍需要提高。
技术实现要素:
8.有鉴于此,有必要提供一种无靶标四目立体视觉系统全局标定方法。
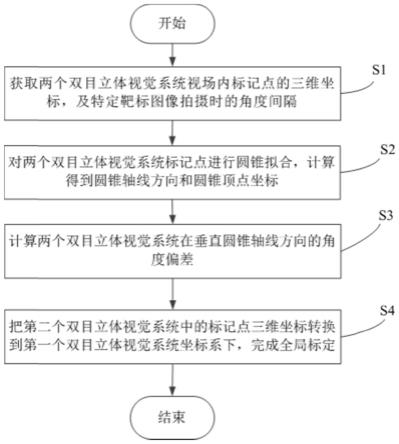
9.本发明提供一种无靶标四目立体视觉系统全局标定方法,该方法包括:步骤s1,分别获取两个双目立体视觉系统视场内一维靶标上标记点的三维坐标,并利用角度传感器获得特定靶标图像拍摄时的角度间隔;步骤s2,根据一维靶标旋转运动形成的圆锥特性,分别对两个双目立体视觉系统采集的标记点进行圆锥拟合,计算圆锥轴线方向和圆锥顶点坐标;步骤s3,利用角度传感器获得的所述角度间隔,计算两个双目立体视觉系统在垂直圆锥轴线方向的角度偏差;步骤s4,根据两个锥面物理上属于同一个锥面的关系,把第二个双目立体视觉系统中的标记点三维坐标通过旋转平移变换,转换到第一个双目立体视觉系统坐标系下,完成全局标定。
10.具体地,所述步骤s1包括:
11.步骤s11,安装角度传感器,确定测量视场;
12.步骤s12,设计标记点;
13.步骤s13,标定高速摄像机,确定每组高速摄像机间立体视觉标定参数;
14.步骤s14,间隔采集桨叶旋转运动图像;
15.步骤s15,对桨叶旋转运动图像进行处理,提取圆心像素坐标,并利用步骤s13得到的立体视觉标定参数,计算四目立体视觉系统各子系统视场内的标记点三维坐标;
16.步骤s16,对标记点三维信息进行预处理。
17.具体地,所述步骤s12包括:
18.所述标记点为对噪声不敏感的圆形标记点,所述标记点的大小和间距在能够满足定位精度的前提下尽可能小。
19.具体地,所述步骤s16包括:
20.首先将同一位置下相同标记点的坐标值按从小到大的顺序进行排序,剔除前20%和后20%,将剩余60%数据的平均值作为该标记点的坐标值。
21.具体地,所述步骤s2包括:
22.步骤s21,在第一个双目立体视觉系统内选取9个均匀分布的标记点,粗拟合圆锥求解锥面方程的9个参数,求得第一个双目立体视觉系统的圆锥轴线和圆锥顶点o
c1
的初始解;
23.步骤s22,通过levenberg-marquardt优化算法,将第一个双目立体视觉系统内所有标记点带入目标函数,使得点到拟合锥面的距离之和最小,得到优化后的圆锥轴线和圆锥顶点o1;
24.步骤s23,对第二个双目立体视觉系统采集的标记点进行圆锥拟合,根据步骤s21和步骤s22,同理得到圆锥轴线和圆锥顶点o2。
25.具体地,步骤s21包括:
26.设圆锥轴线初始解圆锥顶点初始解o
c1
(x1,y1,z1),其方程表示为:
[0027][0028]
设圆锥母线方程为:
[0029][0030]
联立公式(1)和公式(2),得锥面方程:
[0031]
f1(x,y,z)=0#(3)。
[0032]
具体地,所述的步骤s3包括:
[0033]
所述角度间隔记为第i号相位在第一个双目立体视觉系统坐标系中的方位角记为θi,第j号相位在第二个双目立体视觉系统坐标系中的方位角记为θj,两个双目立体视觉系统在垂直圆锥轴线方向的角度偏差记为则
[0034]
具体地,所述的步骤s4包括:
[0035]
步骤s41,把旋转至与平行,其旋转矩阵记为r1;
[0036]
步骤s42,把o2平移至与o1重合,其平移矩阵记为t;
[0037]
步骤s43,把第二个双目立体视觉系统坐标系绕第一个双目立体视觉系统的圆锥轴线旋转其旋转矩阵记为r2;
[0038]
步骤s44,综合上述步骤s41-s43,第二个双目立体视觉系统中任一标记点三维齐次坐标转换到第一个双目立体视觉系统坐标系的齐次坐标记为p
ij
′
:p
ij
′
=r2[r1,t]p
ij
。
[0039]
本发明通过采集一维靶标旋转运动时的轨迹图像,利用立体视觉标定技术和图像处理技术,得到靶标上标记点的三维坐标,再利用一维靶标旋转时的共锥度性质,分别计算两个双目立体视觉系统下圆锥轴线方向和圆锥顶点坐标,通过坐标系的旋转平移变换,统一四目立体视觉系统,从而完成全局标定。本发明无需立体视觉系统间有公共视场,且操作方便,标定速度快,标定精度高,具有较强的实用性。
附图说明
[0040]
图1为本发明无靶标四目立体视觉系统全局标定方法的流程图;
[0041]
图2为本发明实施例提供的标记点示意图;
[0042]
图3为本发明实施例提供的桨叶旋转示意图。
具体实施方式
[0043]
下面结合附图及具体实施例对本发明作进一步详细的说明。
[0044]
请参阅图1,是本发明无靶标四目立体视觉系统全局标定方法较佳实施例的作业流程图。
[0045]
步骤s1,分别获取两个双目立体视觉系统视场内一维靶标上标记点的三维坐标,并利用角度传感器获得特定靶标图像拍摄时的角度间隔。具体包括:
[0046]
步骤s11,安装角度传感器,确定测量视场:根据桨叶长度,在桨叶下方的承重台上布置双目立体视觉系统。
[0047]
本实施例中,桨叶长度为2.1m,相机置于桨叶下方5m处,每个双目立体视觉系统的视场大小为4.6m*2.3m,两个双目立体视觉系统能够覆盖整个旋翼视场。
[0048]
步骤s12,设计标记点:
[0049]
本实施例中,采用对噪声不敏感的圆形标记点,其大小和间距在能够满足定位精度的前提下尽可能小,这样可以在一维靶标上多布置一些标记点,增加有效数据量,从而提高标定精度。本实施例的标记点设计如图2所示,标记点贴于桨叶1/4弦线位置上,标记点直径为44mm,两标记点间间距为90mm,共布置18个标记点。
[0050]
步骤s13,标定高速摄像机,确定每组高速摄像机间立体视觉标定参数。
[0051]
步骤s14,通过倍频装置等间隔采集桨叶旋转运动图像,存入计算机:
[0052]
桨叶旋转示意图如图3所示,o为桨毂中心位置,{l1,l2,
…
,lm}为桨叶旋转时所在位置,{p
11
,p
21
,
…
,p
n1
,
…
,p
nm
}为标记点所在位置。本实施例中,桨叶转速50rpm,桨叶每间隔20度采集一次桨叶旋转运动图像,桨叶旋转一圈共采集18个位置。
[0053]
步骤s15,对桨叶旋转运动图像进行处理,提取圆心像素坐标,并利用步骤s13得到的立体视觉标定参数,计算四目立体视觉系统各子系统视场内的标记点三维坐标;
[0054]
步骤s16,对标记点三维信息进行预处理。
[0055]
本实施例通过采集100圈桨叶旋转运动图像以消除随机误差:首先将同一位置下相同标记点的100个坐标值按从小到大的顺序进行排序,剔除前20%和后20%,将剩余60%数据的平均值作为该标记点的坐标值。
[0056]
步骤s2,根据一维靶标旋转运动形成的圆锥特性,双目立体视觉系统采集的各相位标记点均在锥面上,分别对两个双目立体视觉系统采集的标记点进行圆锥拟合,计算圆锥轴线方向和圆锥顶点坐标。具体包括:
[0057]
步骤s21,在第一个双目立体视觉系统内选取9个均匀分布的标记点,粗拟合圆锥求解锥面方程的9个参数,求得第一个双目立体视觉系统的圆锥轴线和圆锥顶点o
c1
的初始解,过程如下:
[0058]
设圆锥轴线初始解圆锥顶点初始解o
c1
(x1,y1,z1),则其方程表示为:
[0059][0060]
设圆锥母线方程为:
[0061][0062]
联立公式(1)和公式(2),得锥面方程:
[0063]
f1(x,,)=0#(3)
[0064]
步骤s22,通过levenberg-marquardt优化算法,将第一个双目立体视觉系统内所有标记点带入目标函数,使得点到拟合锥面的距离之和最小,得到优化后的圆锥轴线和圆锥顶点o1;
[0065]
步骤s23,对第二个双目立体视觉系统采集的标记点进行圆锥拟合,根据步骤s21和步骤s22,同理可得圆锥轴线和圆锥顶点o2。
[0066]
步骤s3,利用角度传感器获得的所述角度间隔,计算两个双目立体视觉系统在垂直圆锥轴线方向的角度偏差。具体而言:
[0067]
所述角度间隔记为第i号相位在第一个双目立体视觉系统坐标系中的方位角记为θi,第j号相位在第二个双目立体视觉系统坐标系中的方位角记为θj,两个双目立体视觉系统在垂直圆锥轴线方向的角度偏差记为则
[0068]
本实施例中,选取第8个相位和第11个相位作为特定相位,即两相位间的隔间再根据步骤s1得到的标记点的三维坐标,计算得出
[0069]
步骤s4,根据两个锥面物理上属于同一个锥面的关系,把第二个双目立体视觉系统中的标记点三维坐标通过旋转平移变换,转换到第一个双目立体视觉系统坐标系下,实
现两个双目立体视觉系统的统一,从而完成全局标定。具体而言:
[0070]
步骤s41,把旋转至与平行,其旋转矩阵记为r1,本实施例中
[0071]
步骤s42,把o2平移至与o1重合,其平移矩阵记为t,本实施例中t=(-175.960,2496.628,4.296);
[0072]
步骤s43,把第二个双目立体视觉系统坐标系绕第一个双目立体视觉系统的圆锥轴线旋转其旋转矩阵记为r2,本实施例中
[0073]
步骤s44,综合上述步骤s41-s43,第二个双目立体视觉系统中任一标记点三维齐次坐标转换到第一个双目立体视觉系统坐标系的齐次坐标记为p
ij
′
:p
ij
′
=r2[r1,t]p
ij
。
[0074]
虽然本发明参照当前的较佳实施方式进行了描述,但本领域的技术人员应能理解,上述较佳实施方式仅用来说明本发明,并非用来限定本发明的保护范围,任何在本发明的精神和原则范围之内,所做的任何修饰、等效替换、改进等,均应包含在本发明的权利保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。