1.本发明属于无源定位技术领域,具体为一种多站时差定位方法。
背景技术:
2.相比于有源定位,多站时差定位具有隐蔽性强、定位精度高、作用距离远等优势,可用于情报侦察、引导电子干扰以及对敌武器平台精确打击,对于提高武器装备在电子战环境中作战能力和生存能力具有重要意义。
3.定位精度作为衡量定位性能最为核心的技术指标,影响定位精度的因素分析历来是多站时差定位研究的重点。影响时差定位精度的主要因素包括布站方式、基线长度、位置误差以及时间差测量精度(含时间同步精度)等,针对多站时差定位的研究大多集中在如何有效改善定位精度方面。
4.针对y型、t型、菱形、正方形以及各种不规则布站方式,其定位精度的几何稀释因子(geometric dilution ofprecision,gdop)存在较大差别,且模糊区域和无解区域的分布也不尽相同,其中,y型布站具有最优的定位性能;基线长度越长,定位精度越高,但受站间通信等因素的影响,基线长度不能过长;站址误差越小、时间差误差越小,定位精度越高(1、陈永光,李昌锦,李修和.三站时差定位的精度分析和推算模型[j].电子学报,2004,32(9):1452-1455.2、张政超,童力.四站时差无源定位精度分析[j].中国电子科学研究院学报,2010,5(6):582-585.3、黄金凤,韩焱,王黎明.无源时差定位布站形式对定位精度的影响[j].火力与指挥控制,2009,34(10):33-35.4、俞志强,王宏远,武文.四站时差定位布站研究[j].电子学报,2005,33(12):2308-2311.5、王瀚,钟丹星,周一宇.不规则布站时差定位系统定位精度分析[j].现代电子技术,2007(7):19-21.6、王卓群,王驹,李亚军,李雁斌,卫恒.基于gdop的四星时差定位精确度分析[j].太赫兹科学与电子信息学报,2020,18(5):808-812.7、石伯翔,王超,郑先宝.四站时差定位技术研究[j].火控雷达技术,2020,49(2):17-23.8、毛泽湘,梁汝鹏.基于圆概率误差的时差定位系统最优布站[j].指挥信息系统与技术,2020,11(4):74-77.)。
[0005]
在布站方式、基线长度、位置精度、时间差精度等因素确定的情况下,多站时差定位的精度也是确定的。布站方式和基线长度受应用场景及通信能力限制,主站和各副站的位置一般通过gps系统或者北斗系统获得,其精度一般在米量级,难以进一步提升。时间差精度受到达时差测量精度以及时间同步精度影响,到达时差测量精度和信噪比、数字采样率、脉冲上升沿特征等因素有关,采用时频域联合时差测量技术,测量精度可达100ps量级(9、贾学梅.快速、高精度时差测量技术研究[d].[硕士论文],西安电子科技大学,2019);时间同步精度和具体同步体制密切相关,基于gps系统或者北斗系统授时的时间同步方法,精度在10ns量级,而采用基于伪码测距的双向时间比对技术,在无线环境下可实现100ps量级的时间同步精度,对应30mm量级的测距精度。在各项误差因素难以进一步提高的情况下,多站时差定位的精度也难以提升。
技术实现要素:
[0006]
本发明的目的在于提供一种多站时差定位方法,本方法通过在多站时差定位方程组求解过程中,引入站间相对距离这一辅助信息,可有效提升定位精度。
[0007]
实现本发明目的的技术解决方案为:一种多站时差定位方法,具体步骤为:
[0008]
步骤1:构建多站时差定位数据模型;
[0009]
步骤2:确定各观测站位置,根据测量得到的各观测站雷达信号到达时间,确定各从站相对于主站的雷达信号到达时间差,确定各从站和主站的相对距离;
[0010]
步骤3:根据各观测站位置、各从站相对于主站的雷达信号到达时间差以及各从站和主站的相对距离,建立定位方程组;
[0011]
步骤4:采用伪逆法求解定位方程组,得到雷达目标位置。
[0012]
优选地,确定确定各从站相对于主站的雷达信号到达时间差具体为:
[0013]
τi=t
i-t0[0014]
式中,τi为从站pi相对于主站的雷达信号到达时间差,ti为从站pi检测到的雷达到达时间,t0为主站检测到的雷达信号到达时间,i=1,2,3。
[0015]
优选地,主站和从站之间通过双向伪码测距实现时间同步,确定各从站和主站的相对距离,具体方法为:
[0016]
主站向从站p1发送前向测距信号,从站p1向主站发送反向测距信号,两站时钟存在钟差δclk;
[0017]
主站捕获和跟踪反向测距信号,得到主站发送前向测距信号和接收反向测距信号之间的时延delay1,delay1包含主站和从站p1之间的物理路径时延ro1、从站p1的发射设备时延tr2、主站的接收设备时延rec1以及两终端间的钟差δclk,具体关系为:
[0018]
delay1=tr2 ro1 δclk rec1[0019]
从站p1测量得到发送反向测距信号和接收前向测距信号之间的时延delay2,具体关系为:
[0020]
delay2=tr1 ro
1-δclk rec2[0021]
其中,dis1为主站和从站p1之间的相对距离;
[0022]
根据主站测量得到发送前向测距信号和接收反向测距信号之间的时延以及从站p1测量得到发送反向测距信号和接收前向测距信号之间的时延,得到主站和从站p1的钟差和相对距离:
[0023][0024]
δclk1=[(delay
1-delay2)-(tr
2-tr1)-(rec
1-rec2)]
[0025]
c为电磁波传播速度,dis1为主站和从站p1的钟差,δclk1为主站和从站p1的相对距离。
[0026]
优选地,建立定位方程组的具体过程为:
[0027]
根据步骤2,获得主站p0的位置(x0,y0,z0)、从站p1的位置(x1,y1,z1)、从站p2的位置(x2,y2,z2)、从站p3的位置(x3,y3,z3)、从站p1相对于主站p0的雷达信号到达时间差τ1、从站p2相对于主站p0的雷达信号到达时间差τ2、从站p3相对于主站p0的雷达信号到达时间差τ3,得
到定位方程组:
[0028][0029]
整理,可得:
[0030][0031]
式中:
[0032][0033]
根据步骤2,获得主站p0和各从站的相对距离dis1、dis2、dis3,记lx1、ly1、lz1分别表示主站p0和从站p1之间x方向、y方向和z方向的相对距离,表示主站p0和从站p1之间x方向的相对距离,则有:
[0034][0035]
将相对距离信息代入定位方程组中,得新的定位方程组:
[0036][0037]
其中:
[0038][0039]
优选地,采用伪逆法求解定位方程组,得到雷达目标位置的具体方法为:、将新的定位方程组写成矩阵形式:
[0040]
ax=f
[0041]
式中,
[0042][0043]
采用伪逆法求解矩阵形式方程组,得到方程组的解:
[0044]
x=(a
t
a)-1at
f。
[0045]
本发明与现有技术相比,其显著优点为:本发明结合基于伪码测距的高精度时间同步技术,在定位方程组求解时,通过引入各从站和主站的相对距离,有效提升了定位精度。
附图说明
[0046]
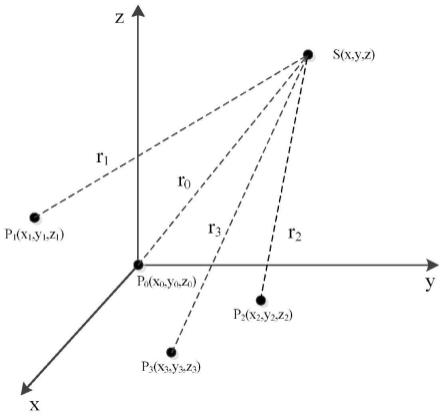
图1是多站时间定位数学模型。
[0047]
图2是双向伪码测距原理框图。
[0048]
图3是位置误差10m时常规时差定位和本发明提出的定位方法的定位精度对比,图3中的(a)为常规的时差定位gdop,图3中的(b)为基于相对距离的时差定位gdop,图3中的(c)为定位性能改进量。
[0049]
图4是位置误差1m时常规时差定位和本发明提出的定位方法的定位精度对比,图4中的(a)为常规的时差定位gdop,图4中的(b)为基于相对距离的时差定位gdop,图4中的(c)为定位性能改进量。
[0050]
图5是位置误差0.1m时常规时差定位和本发明提出的定位方法的定位精度对比,图5中的(a)为常规的时差定位gdop,图5中的(b)为基于相对距离的时差定位gdop,图5中的(c)为定位性能改进量。
[0051]
图6是时间差误差20ns时常规时差定位和本发明提出的定位方法的定位精度对比,图6中的(a)为常规的时差定位gdop,图6中的(b)为基于相对距离的时差定位gdop,图6中的(c)为定位性能改进量。
[0052]
图7是时间差误差10ns时常规时差定位和本发明提出的定位方法的定位精度对比,图7中的(a)为常规的时差定位gdop,图7中的(b)为基于相对距离的时差定位gdop,图7中的(c)为定位性能改进量。
[0053]
图8是时间差误差1ns时常规时差定位和本发明提出的定位方法的定位精度对比,图8中的(a)为常规的时差定位gdop,图8中的(b)为基于相对距离的时差定位gdop,图8中的(c)为定位性能改进量。
[0054]
图9是相对距离误差10m时常规时差定位和本发明提出的定位方法的定位精度对比,图9中的(a)为常规的时差定位gdop,图9中的(b)为基于相对距离的时差定位gdop,图9中的(c)为定位性能改进量。
[0055]
图10是相对距离误差1m时常规时差定位和本发明提出的定位方法的定位精度对比,图10中的(a)为常规的时差定位gdop,图10中的(b)为基于相对距离的时差定位gdop,图10中的(c)为定位性能改进量。
[0056]
图11是相对距离误差0.1m时常规时差定位和本发明提出的定位方法的定位精度对比,图11中的(a)为常规的时差定位gdop,图11中的(b)为基于相对距离的时差定位gdop,图11中的(c)为定位性能改进量。
[0057]
图12是基线长度为20km时常规时差定位和本发明提出的定位方法的定位精度对比,图12中的(a)为常规的时差定位gdop,图12中的(b)为基于相对距离的时差定位gdop,图12中的(c)为定位性能改进量。
[0058]
图13是基线长度为10km时常规时差定位和本发明提出的定位方法的定位精度对比,图13中的(a)为常规的时差定位gdop,图13中的(b)为基于相对距离的时差定位gdop,图13中的(c)为定位性能改进量。
[0059]
图14是基线长度为5km时常规时差定位和本发明提出的定位方法的定位精度对比,图14中的(a)为常规的时差定位gdop,图14中的(b)为基于相对距离的时差定位gdop,图14中的(c)为定位性能改进量。
具体实施方式
[0060]
下面结合附图对本发明作进一步详细描述。
[0061]
步骤1:构建多站时差定位数学模型。
[0062]
图1所示为多站时差定位数学模型。(x,y,z)为雷达目标s的空间位置,为待求量;(x0,y0,z0)为主站p0的空间位置,(x1,y1,z1)为从站p1的空间位置,(x2,y2,z2)为从站p2的空间位置,(x3,y3,z3)为从站p3的空间位置,可通过观测得到。记r0为主站p0到雷达目标s的距离,r1为从站p1到雷达目标s的距离,r2为从站p2到雷达目标s的距离,r3为从站p3到雷达目标s的距离,t0为信号从雷达目标s处传播到主站p0的时间,t1为信号从雷达目标s处传播到主站p1的时间,t2为信号从雷达目标s处传播到主站p2的时间,t3为信号从雷达目标s处传播到主站p3的时间,δr1为主站p0到雷达目标s和从站p1到雷达目标s的距离差,δr1=r
1-r0,δr2为主站p0到雷达目标s和从站p2到雷达目标s的距离差,δr2=r
2-r0,δr3为主站p0到雷达目标s和从站p3到雷达目标s的距离差,δr1=r
1-r0,τ1为信号从主站p0到雷达目标s和信号从从站p1到雷达目标s的传播时间差,且δr1=c
·
τ1,其中,c为电磁波传播速度,c=3.0
×
108m/s,τ2为信号从主站p0到雷达目标s和信号从从站p2到雷达目标s的传播时间差,且δr2=c
·
τ2,τ3为信号从主站p0到雷达目标s和信号从从站p3到雷达目标s的传播时间差,且δr3=c
·
τ3。
[0063]
步骤2:确定各观测站位置,根据测量得到的各观测站雷达信号到达时间,确定各从站相对于主站的雷达信号到达时间差,确定各从站和主站的相对距离。
[0064]
各观测站包括主站p0、从站p1、从站p2和从站p3,各观测站的位置通过gps或者北斗全球导航定位系统得到。
[0065]
各观测站通过数字信号检测可测量得到雷达信号到达时间,记主站检测到的雷达信号到达时间为t0,从站p1检测到的雷达信号到达时间为t1,从站p2检测到的雷达信号到达时间为t2,从站p3检测到的雷达信号到达时间为t3,则可以得到各从站相对于主站的雷达信号到达时间差:τ1=t
1-t0,τ2=t
2-t0,τ3=t
3-t0。
[0066]
主站p0和从站p1、从站p2、从站p3之间通过双向伪码测距实现高精度时间同步,以主站p0和从站p1为例,双向伪码测距原理框图如图2所示,主站p0和从站p2、主站p0和从站p3同步过程相同,不再赘述。主站p0向从站p1发送前向测距信号,从站p1向主站p0发送后向测距信号,两站时钟存在钟差δclk。主站p0捕获和跟踪反向测距信号,可以得到发送前向测距信号和接收反向测距信号之间的时延delay1,delay1包含主站p0和从站p1之间的物理路
径时延ro1、从站p1的发射设备时延tr2、主站p0的接收设备时延rec1以及两终端间的钟差δclk,其关系为:
[0067]
delay1=tr2 ro1 δclk rec1(1)同理,从站p1可以测量得到发送反向测距信号和接收前向测距信号之间的时延delay2:
[0068]
delay2=tr1 ro
1-δclk rec2(2)
[0069]
其中,dis1为主站p0和从站p1之间的相对距离,结合式(1)和式(2),可以得到主站p0和从站p1的钟差δclk1和相对距离dis1:
[0070][0071]
δclk1=[(delay
1-delay2)-(tr
2-tr1)-rec
1-rec2)](4)
[0072]
同理,可以得到主站p0和从站p2的钟差δclk2和相对距离dis2、主站p0和从站p3的钟差δclk3和相对距离dis3,且,且不再赘述。
[0073]
步骤3:根据各观测站位置、各从站相对于主站的雷达信号到达时间差以及各从站和主站的相对距离,建立定位方程组。
[0074]
根据步骤2,获得主站p0的位置(x0,y0,z0)、从站p1的位置(x1,y1,z1)、从站p2的位置(x2,y2,z2)、从站p3的位置(x3,y3,z3)、从站p1相对于主站p0的雷达信号到达时间差τ1、从站p2相对于主站p0的雷达信号到达时间差τ2、从站p3相对于主站p0的雷达信号到达时间差τ3,可以得到如下定位方程组:
[0075][0076]
整理,可得:
[0077][0078]
式中:
[0079][0080]
根据步骤2,获得主站p0和各从站的相对距离dis1、dis2、dis3,记lx1、ly1、lz1分别表示主站p0和从站p1之间x方向、y方向和z方向的相对距离,表示主站p0和从站p1之间x方向的相对距离,则有:
[0081][0082]
将相对距离信息代入定位组(6)中,可得新的定位方程组:
[0083][0084]
其中:
[0085][0086]
步骤4:采用伪逆法求解定位方程组,得到雷达目标位置。
[0087]
将方程组(9)写成矩阵形式:
[0088]
ax=f(11)
[0089]
式中,
[0090][0091]
采用伪逆法求解方程组(11),得到方程组的解:
[0092]
x=(a
t
a)-1at
f(12)
[0093]
下面结合仿真实验进一步说明本发明的效果。
[0094]
为便于表征基于相对距离的时差定位性能改进情况,定义:
[0095]
δgdop=(gdop
trad
/r
0-gdop
dis
/r0)/(gdop
dis
/r0)
×
100%(13)
[0096]
其中,gdop
trad
表示常规的时差定位的gdop,gdop
dis
表示本发明基于站间相对距离辅助的时差定位的gdop,r0表示雷达目标s与主站p0的距离,δgdop表示定位性能改进量。如果δgdop>0说明定位精度提升,如果δgdop<0,说明定位精度降低,如果δgdop=0,说明定位精度无变化。
[0097]
以空间四站为典型配置,通过和同等条件下常规的时差定位的定位精度进行比对,仿真分析基于相对距离的时差定位的定位性能,涉及的变量包括位置误差、时间差误差、相对距离误差以及基线长度等。仿真条件设置如下表所示:
[0098]
表1仿真条件设置
[0099][0100]
固定时间差误差为10ns、相对距离误差为0.1m、基线长度为10km,各站位置误差分别取10m、5m、1m,常规时差定位和本发明提出的定位方法的精度对比如图1、图2、图3所示。
[0101]
从图1可以看出,基于相对距离的时差定位的定位精度明显要高于常规时差定位方法,在时间差误差为10ns、相对距离误差为0.1m、基线长度为10km,位置误差为10m时,在整个100km
×
100km的区域范围内,定位精度提升约80%左右;
[0102]
综合图1、图2和图3,固定时间差误差、相对距离误差不变,随着各站位置误差越来越小,本发明所提出方法的定位精度仍高于常规时差定位方法,但是定位精度的提升量逐
渐降低,这是因为,随着各站位置误差的减小,常规时差定位方法的定位精度也在提高,而所提出方法的定位精度基本保持不变,说明本发明所提出方法的定位精度为位置误差不敏感。
[0103]
固定位置误差为10m、相对距离误差为0.1m、基线长度为10km,时间差误差分别取为20ns、10ns、1ns,常规时差定位和本发明提出的定位方法的精度对比如图4、图5、图6所示。
[0104]
综合图4、图5和图6,固定位置误差、相对距离误差、基线长度不变,随着时间差误差越来越小,本发明所提出方法的定位精度都要高于常规时差定位方法,且定位精度的提升量逐渐增加,这是因为,随着时间差误差的减小,常规时差定位方法的定位精度几乎不变,说明此时,时间差误差已经不是引起定位误差的主要因素。其实20ns的时间差误差等效于6m的位置误差,已经小于10m的实际位置误差,因此在20ns的基础上降低时间差误差对于定位精度提高几乎没有贡献;而本发明所提出方法的定位精度明显增加,说明引入相对距离后,提高时间差误差对于提高定位精度仍有较大贡献。
[0105]
固定位置误差为10m、时间差误差为10ns、基线长度为10km,相对距离误差分别取10m、1m、0.1m,常规时差定位和本发明提出的定位方法的精度对比如图7、图8、图9所示。
[0106]
综合图7、图8和图9,固定位置误差、时间差误差、基线长度不变,随着相对距离误差越来越小,本发明所提出方法的定位精度都要高于常规时差定位方法,且定位精度的提升量逐渐增加,这是因为,随着时间差误差的减小,常规时差定位方法的定位精度虽然也在提高,但引入相对距离对提高定位精度的贡献相对更高,需要注意的是,当相对距离误差由1m提升至0.1m时,定位精度提升量变化并不大,这是因为,此时位置误差和时间差误差已成为制约定位精度的主要因素。
[0107]
固定位置误差为5m、时间差误差为10ns、相对距离误差为1m,基线长度分别取20km、10km、1km,常规时差定位和本发明提出的定位方法的精度对比如图10、图11、图12所示。
[0108]
综合图10、图11和图12可以看出,在不同基线长度下,所提出方法的定位精度都要高于常规时差定位方法,但是定位精度的提升量变化不大,基本都在65%左右。
[0109]
综合以上仿真结果,相比于常规的多站时差定位方法,本发明提出的定位方法能有效提升定位精度,并且位置误差误差越小,定位精度的提升量越小,时间差误差、相对距离误差越小,定位精度的提升量越大,原因和各误差因素的占比有关。。
[0110]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
[0111]
应当理解,为了精简本发明并帮助本领域的技术人员理解本发明的各个方面,在上面对本发明的示例性实施例的描述中,本发明的各个特征有时在单个实施例中进行描述,或者参照单个图进行描述。但是,不应将本发明解释成示例性实施例中包括的特征均为本专利权利要求的必要技术特征。
[0112]
应当理解,可以对本发明的一个实施例的设备中包括的模块、单元、组件等进行自适应性地改变以把它们设置在与该实施例不同的设备中。可以把实施例的设备包括的不同模块、单元或组件组合成一个模块、单元或组件,也可以把它们分成多个子模块、子单元或
子组件。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
