1.本发明涉及成像系统,更具体地说,它涉及基于机械臂的太赫兹反射成像系统。
背景技术:
2.太赫兹波(terahertz wave,简称thz波)是指频率介于100ghz-10 thz(波长30μm-3mm)之间的一段电磁波,位于红外波和微波波段之间。太赫兹波是电磁波谱中研究相对滞后的一个波段,从1990年科学家发现大功率飞秒激光可以产生太赫兹波段的电磁辐射开始,太赫兹波段的研究得到迅速发展,成为极有价值的科学工具。太赫兹波相对于其他波段的电磁波有一些独特的性质。因为太赫兹波恰好位于红外波和微波之间,因此兼具有两种波段的特点:在宏观上具有类似微波的穿透能力和类似光波的方向性;在微观上具有量子特征单光子能量和分子的转动能级相当。太赫兹波对很多介电材料和非极性液体具有良好的穿透性,因此可以用于安全检查和质量控制等领域。与x射线相比,太赫兹波的光子能量远低于损害生物组织的能量阈值,因此安全性远高于其他波段的电磁波。与此同时,大多数在安检领域比较重视的物质(例如毒品、炸药等)在太赫兹波段存在特征谱,因此可以通过光谱分析将这些物质鉴定出来。此外,太赫兹波对水有较高的灵敏性,并且不会对生物分子、生物细胞和阻止产生有害的电离和破坏,特别适用于对生物组织进行活体检查。因此,太赫兹波可以作为医学成像和癌症检测的工具。
3.太赫兹连续波成像系统可以分为透射成像和反射成像两大类。其中,属于透射成像技术的有二维透射成像技术、太赫兹层析成像技术和太赫兹单像素成像技术等。尽管基于透射光强的太赫兹成像技术发展迅速,然而,太赫兹波不能穿透金属和含水量高的物质,因此太赫兹连续波反射成像技术也有重要的研究价值。现有的太赫兹反射成像技术中,太赫兹光束都是由凸透镜或离轴抛物面镜进行准直或者聚焦的,因此现有的成像技术中所用的太赫兹光束均为太赫兹高斯光束。众所周知,在该技术中必须权衡考虑高斯光束的宽度和焦深。然而,贝塞尔光束能够在较长的无衍射距离范围内保持光束宽度和横截面光强分布不变。因此,将零阶贝塞尔光束用于太赫兹反射成像系统中可以扩展成像系统的景深。
4.现有的太赫兹反射成像系统,为方便对焦操作,一般是将样品放在样品台上,通过样品台的移动实现对焦。而系统的太赫兹发射源、衍射光学元件太赫兹探测器等部件固定安装。例如公开号为cn112362612a公开的基于三维radon变换的太赫兹层析成像系统及其成像方法、操作方法。但这样的结构会导致系统的使用场景受限,同时也限制了太赫兹反射成像技术的推广。
技术实现要素:
5.本发明要解决的技术问题是针对现有技术的不足,提供基于机械臂的太赫兹反射成像系统。
6.本发明所述的基于机械臂的太赫兹反射成像系统,包括太赫兹发射源、太赫兹探测器、第一光路组件、第二光路组件、五自由度机械臂;所述五自由度机械臂由安装臂、用于
驱使安装臂转动的转动臂、用于驱使转动臂转动的第二伸展臂、用于驱使第二伸展臂的第一伸展臂、用于驱使第一伸展臂伸展的旋转臂和安装箱组成;
7.所述安装臂上安装有太赫兹发射源和太赫兹探测器;所述第一光路组件安装在太赫兹发射源的输出端,所述第二光路组件安装在太赫兹探测器的接收端。
8.所述安装箱中设有第一电机、第一同步轮和第二同步轮;所述第一电机固定安装在安装箱中,所述第一同步轮固定安装在第一电机的输出轴上,所述第二同步轮通过第一连接转杆转动安装在安装箱的一侧,所述第一同步轮和第二同步轮通过第一同步带传动连接,所述旋转臂固定安装在第一连接转杆的末端。
9.所述旋转臂包括第一臂体、第二双轴电机;所述第一臂体固定安装在第一连接转杆的末端,所述第二双轴电机固定安装在第一臂体中,所述第二双轴电机输出轴上固定安装有第三同步轮,所述第一臂体的一端转动安装有第二连接转杆,所述第二连接转杆的两端均固定安装有第四同步轮,位于所述第一臂体同一侧的第三同步轮和第四同步轮通过第二同步带传动连接;所述第一伸展臂与第二连接转杆固定连接。
10.所述第一伸展臂包括第二臂体、第三双轴电机;所述第二臂体与第二连接转杆固定连接,所述第三双轴电机固定安装在第二臂体中,所述第三双轴电机输出轴上固定安装有第五同步轮,所述第二臂体的一端转动安装有第三连接转杆,所述第三连接转杆的两端均固定安装有第六同步轮,位于所述第二臂体同一侧的第五同步轮和第六同步轮通过第三同步带传动连接;所述第二伸展臂与第三连接转杆固定连接。
11.所述第二伸展臂包括第三臂体、第四电机;所述第三臂体与第三连接转杆固定连接,所述第四电机固定安装在第三臂体中,所述第四电机的输出轴上固定安装有第七同步轮,所述第三臂体中转动安装有第四连接转杆,所述第四连接转杆的末端固定安装有第八同步轮,所述第七同步轮和第八同步轮通过第四同步带传动连接;所述第八同步轮的一侧固定设有安装盘,所述转动臂与安装盘固定连接。
12.所述转动臂包括第四臂体、第五双轴电机;所述第四臂体与安装盘固定连接,所述第五双轴电机固定安装在第四臂体中,所述第五双轴电机输出轴上固定安装有第九同步轮,所述第四臂体的一端转动安装有第五连接转杆,所述第五连接转杆的两端均固定安装有第十同步轮,位于所述第四臂体同一侧的第九同步轮和第十同步轮通过第五同步带传动连接;所述安装臂与第五连接转杆固定连接。
13.所述安装臂包括连接座、连接板;所述连接座与第五连接转杆固定连接,所述连接板固定设在连接座的一侧,所述连接板上设有安装盒;所述安装盒中开设有与连接板相匹配的插接槽,所述连接板插接在插接槽中,所述安装盒上旋接有用于顶紧连接板的第一锁紧旋钮,所述太赫兹发射源、太赫兹探测器均固定安装在安装盒中。
14.所述安装盒中开设有用于放置太赫兹发射源的第一空腔和用于放置太赫兹探测器的第二空腔,所述安装盒的一侧旋接有用于顶紧太赫兹发射源的第二锁紧旋钮和用于顶紧太赫兹探测器的第三锁紧旋钮。
15.所述第一光路组件包括准直透镜、硅片和第一衍射元件;所述太赫兹发射源发射端外围的安装盒上设有多个第一定位杆,多个所述第一定位杆共同固定准直透镜、硅片和第一衍射元件。
16.所述第二光路组件包括聚焦透镜和第二衍射元件;所述太赫兹探测器接收端外围
的安装盒上设有多个第二定位杆,多个所述第二定位杆共同固定聚焦透镜和第二衍射元件。
17.有益效果
18.本发明的优点在于:通过五自由度机械臂可带动太赫兹发射源、太赫兹探测器及其相关组件进行水平方位、竖直方位以及角度的移动,能够实现不移动样品完成对样品不同方位的检测,丰富拓展太赫兹反射成像系统使用场景。此外,五自由度机械与太赫兹发射源、太赫兹探测器的集成式安装,方便了太赫兹反射成像系统的整体布置以及运输。
附图说明
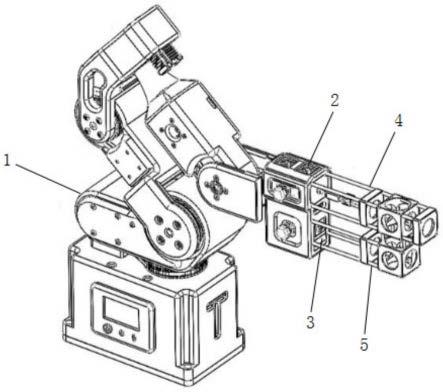
19.图1为本发明的太赫兹反射成像系统立体结构示意图;
20.图2为本发明的五自由度机械臂立体结构示意图;
21.图3为本发明的安装箱立体结构示意图;
22.图4为本发明的旋转臂立体结构示意图;
23.图5为本发明的第一伸展臂立体结构示意图;
24.图6为本发明的第二伸展臂立体结构示意图;
25.图7为本发明的转动臂立体结构示意图;
26.图8为本发明的安装臂立体结构示意图;
27.图9为本发明的安装盒正面结构示意图;
28.图10为本发明的太赫兹发射源和太赫兹探测器的安装结构示意图。
29.其中:1-五自由度机械臂、2-太赫兹发射源、3-太赫兹探测器、4-第一光路组件、5-第二光路组件、6-安装盒、7-第一锁紧旋钮、8-第二锁紧旋钮、9-第三锁紧旋钮、11-安装箱、12-旋转臂、13-第一伸展臂、14-第二伸展臂、15-转动臂、16-安装臂、17-显示器、18-第一同步轮、19-第二同步轮、41-准直透镜、42-硅片、43-第一衍射元件、51-聚焦透镜、52-第二衍射元件、61-第一空腔、62-第二空腔、63-第一定位杆、64-第二定位杆、65-插接槽、121-第一臂体、122-第二双轴电机、123-第三同步轮、124-第四同步轮、125-第二连接转杆、131-第二臂体、132-第三双轴电机、133-第五同步轮、134-第六同步轮、135-第三同步带、136-第三连接转杆、141-第三臂体、142-第四电机、143-第八同步轮、144-安装盘、145-第四连接转杆、151-第四臂体、152-第十同步轮、153-第五同步带、154-第五连接转杆、161-连接座、162-连接板。
具体实施方式
30.下面结合实施例,对本发明作进一步的描述,但不构成对本发明的任何限制,任何人在本发明权利要求范围所做的有限次的修改,仍在本发明的权利要求范围内。
31.参阅图1和图2,本发明的基于机械臂的太赫兹反射成像系统,包括太赫兹发射源2、太赫兹探测器3、第一光路组件4、第二光路组件5和五自由度机械臂1。其中,五自由度机械臂1由安装臂16、用于驱使安装臂16转动的转动臂15、用于驱使转动臂15转动的第二伸展臂14、用于驱使第二伸展臂14的第一伸展臂13、用于驱使第一伸展臂13伸展的旋转臂12和安装箱11组成。
32.参阅图3-图8,以下将对五自由度机械臂1的具体结构进行介绍。
33.如图3-图4所示,安装箱11中设有第一电机、第一同步轮18和第二同步轮19。安装箱11的尺寸为长380mm,宽230mm,高250mm。第一电机固定安装在安装箱11中,第一同步轮18固定安装在第一电机的输出轴上,第二同步轮19通过第一连接转杆转动安装在安装箱11的一侧,第一同步轮18和第二同步轮19通过第一同步带传动连接。旋转臂12固定安装在第一连接转杆的末端。其中,第一同步轮18和第二同步轮19的传动比为10:1。
34.当第一电机工作,驱使第一同步轮18转动时,第一同步轮18通过第一同步带驱使第二同步轮19转动,从而实现了旋转臂12在水平面上的转动。
35.在本实施例中,安装箱11中安装了用于控制五自由度机械臂1中各电机工作的控制器,以及显示器17、电源开关、电源接口、通讯接口和数据采集卡,以实现集成化安装。其中,数据采集卡用于太赫兹探测器3输出的电信号。
36.如图4所示,关于旋转臂12,其包括第一臂体121、第二双轴电机122。第一臂体121固定安装在第一连接转杆的末端,第二双轴电机122固定安装在第一臂体121中,第二双轴电机122输出轴上固定安装有第三同步轮123,第一臂体121的一端转动安装有第二连接转杆125,第二连接转杆125的两端均固定安装有第四同步轮124,位于第一臂体121同一侧的第三同步轮123和第四同步轮124通过第二同步带传动连接。第一伸展臂13与第二连接转杆125固定连接。其中,第三同步轮123和第四同步轮124的传动比为8:1。本实施例的旋转臂12设计参数为,第一臂体121的长400mm,宽166mm,高200mm,转角范围为-π/2-π/2,输出扭矩为120n*m。
37.当第二双轴电机122工作,驱使第三同步轮123转动时,第三同步轮123通过第二同步带驱使第四同步轮124进行转动,从而实现了第一伸展臂13在竖向平面,即与水平面垂直的平面上的转动。
38.如图5所示,关于第一伸展臂13,其包括第二臂体131、第三双轴电机132。第二臂体131与第二连接转杆125固定连接,第三双轴电机132固定安装在第二臂体131中,第三双轴电机132输出轴上固定安装有第五同步轮133,第二臂体131的一端转动安装有第三连接转杆136,第三连接转杆136的两端均固定安装有第六同步轮134,位于第二臂体131同一侧的第五同步轮133和第六同步轮134通过第三同步带135传动连接。第二伸展臂14与第三连接转杆136固定连接。其中,第五同步轮133和第六同步轮134的传动比为7:1。本实施例的第二臂体131长305mm,宽115mm,高228mm,转角范围为-π/2-π/2,输出扭矩为96n*m。
39.当第三双轴电机132工作,驱使第五同步轮133转动时,第五同步轮133通过第三同步带135驱使第六同步轮134进行转动,从而实现了第二伸展臂14在竖向平面上的转动。通过两个伸展臂的相互配合,使得太赫兹发射源2和太赫兹探测器3可在竖向方向位置可调。即实现了太赫兹发射源2和太赫兹探测器3的高度调节,利于对焦操作。
40.如图6所示,关于第二伸展臂14,其包括第三臂体141、第四电机142。第三臂体141与第三连接转杆136固定连接,第四电机142固定安装在第三臂体141中,第四电机142的输出轴上固定安装有第七同步轮,第三臂体141中转动安装有第四连接转杆145,第四连接转杆145的末端固定安装有第八同步轮143,第七同步轮和第八同步轮143通过第四同步带传动连接。第八同步轮143的一侧固定设有安装盘144,转动臂15固定安装在安装盘144上。其中,第七同步轮和第八同步轮143的传动比为3.5:1。本实施例中,第三臂体141长335mm,宽181mm,高167mm,转角范围为-π/4-π/4,输出扭矩为12.6n*m。
41.当第四电机142工作,驱使第七同步轮转动时,第七同步轮通过第四同步带驱使第八同步轮143进行转动,从而实现了转动臂15的转动。通过转动臂15带动太赫兹发射源2转动,使得太赫兹发射源2产生的光束能照射在样品不同的位置,提高了系统的灵活性。
42.如图7所示,关于转动臂15,其包括第四臂体151、第五双轴电机。第四臂体151固定安装在安装盘144上,第五双轴电机固定安装在第四臂体151中,第五双轴电机输出轴上固定安装有第九同步轮,第四臂体151的一端转动安装有第五连接转杆154,第五连接转杆154的两端均固定安装有第十同步轮152,位于第四臂体151同一侧的第九同步轮和第十同步轮152通过第五同步带153传动连接。安装臂16与第五连接转杆154固定连接。其中,第九同步轮和第十同步轮152的传动比为5:1。本实施例中,第四臂体151长447mm,宽121mm,高121mm,转角范围为-π/2-π/2,输出扭矩为7.2n*m。
43.当第五双轴电机工作,驱使第九同步轮转动时,第九同步轮通过第五同步带153驱使第十同步轮152进行转动,从而实现了安装臂16的转动。由于安装臂16上安装有太赫兹发射源2和太赫兹探测器3,因此安装臂16的转动可直接带动太赫兹发射源2和太赫兹探测器3转动。而且安装臂16的转动面为竖向平面,利于对太赫兹发射源2和太赫兹探测器3的水平调节。
44.在本实施例中第一电机采用86单轴型步进电机;第二双轴电机122采用86双轴型步进电机;第三双轴电机132、第五双轴电机均采用57双轴型步进电机;第四电机142采用57单轴型步进电机。这样设置的原因在于五自由度机械臂1的旋转臂12和第一伸展臂13主要为承载臂,其承受较大的重力矩,因此选用输出力矩较大的86型步进电机。为保证机身的强度和精度,各个臂体采用铝材机床加工,整体设计紧凑以降低五自由度机械臂1的自重,从而达到减少自重耗能的目的。
45.如图8所示,本实施例的安装臂16包括连接座161、连接板162、安装盒6和第一锁紧旋钮7。连接座161与第五连接转杆154固定连接,连接板162固定设在连接座161的一侧,安装盒6中开设有与连接板162相匹配的插接槽65,连接板162插接在插接槽65中,安装盒6上旋接有用于顶紧连接板162的第一锁紧旋钮7,从而实现了安装盒6的安装固定,且便于拆装,操作简单快捷。本实施例的连接座161长308mm,宽121mm,高121mm,转角范围为-π/4-π/4,输出扭矩为9n*m。
46.如图9所示,安装盒6中开设有用于放置太赫兹发射源2的第一空腔61和用于放置太赫兹探测器3的第二空腔62,安装盒6的一侧旋接有用于顶紧太赫兹发射源2的第二锁紧旋钮8和用于顶紧太赫兹探测器3的第三锁紧旋钮9,实现了太赫兹发射源2和太赫兹探测器3的安装固定。
47.第一光路组件4安装在太赫兹发射源2的输出端,第二光路组件5安装在太赫兹探测器3的接收端。本实施例的太赫兹探测器3射出的太赫兹光束为高斯光束,束腰半径为2.3mm,光波频率范围为220ghz-330ghz,功率为200-300毫瓦。太赫兹探测器3的探测频率范围为220ghz-330ghz。第一光路组件4将太赫兹光束变换为零阶贝塞尔光束,并将贝塞尔光束传输至样品。经过样品反射后的贝塞尔光束经过第二光路组件5汇聚和收集,传输至太赫兹探测器3。太赫兹探测器3将接收到的反射光强信号转换为放大的电压信号,并输入至数据采集卡进行读取。此时,计算机即可从数据采集卡中读取电压信号值,并将其与被测样品的位置信息一一对应记录,得到被测物体的反射图像。
48.如图10所示,在本实施例中,第一光路组件4包括准直透镜41、硅片42和第一衍射元件43。太赫兹发射源2发射端外围的安装盒6上设有多个第一定位杆63,多个第一定位杆63共同固定准直透镜41、硅片42和第一衍射元件43。
49.第二光路组件5包括聚焦透镜51和第二衍射元件52。太赫兹探测器3接收端外围的安装盒6上设有多个第二定位杆64,多个第二定位杆64共同固定聚焦透镜51和第二衍射元件52。
50.本发明的工作原理是:首先通过显示器17和控制器控制五自由度机械臂1,以使安装在其末端的太赫兹发射源2的发射端和太赫兹探测器3接收端正对位于其下方的样品,且确保焦距合适。接着启动太赫兹发射源2和太赫兹探测器3,以对样品进行成像。其具体的成像过程如下。
51.一、太赫兹发射源2发射出频率为300hz、束腰半径为2.3mm的太赫兹高斯光束;
52.二、太赫兹高斯光束由准直透镜41准直,然后经硅片42后入射到第一衍射元件43上;
53.三、第一衍射元件43将入射的准直的太赫兹高斯光束转换为太赫兹贝塞尔光束,并引入到待扫描的物体上;
54.四、反射的太赫兹贝塞尔光束经第二衍射元件52后,转换为准直的太赫兹光束,并反射到聚焦透镜51上;
55.五、聚焦透镜51将太赫兹光束汇聚到太赫兹探测器3中;
56.六、太赫兹探测器3将接收的光强信号转换为放大的电压信号,然后传输到数据采集卡进行读取和显示;
57.七、计算机从数据采集卡中读取数据,并将其与被测样品的位置信息一一对应记录得到被测物体的反射信号;
58.八、五自由度机械臂1驱使太赫兹发射源2和太赫兹探测器3沿水平面的x方向平移,然后沿y方向平移一个步进间隔;并进行上述“一”至“七”步骤;
59.九、重复上述“八”步骤,即可得到样品位于不同景深的反射图像。
60.以上所述的仅是本发明的优选实施方式,应当指出对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些都不会影响本发明实施的效果和专利的实用性。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。