技术特征:
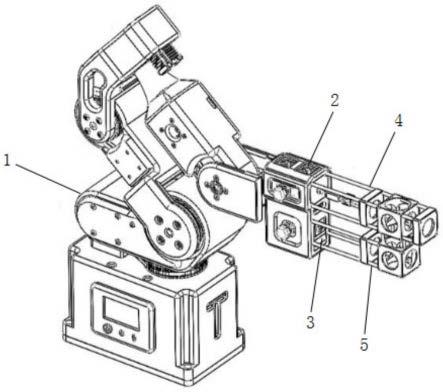
1.基于机械臂的太赫兹反射成像系统,包括太赫兹发射源(2)、太赫兹探测器(3)、第一光路组件(4)、第二光路组件(5);其特征在于,还包括一五自由度机械臂(1);所述五自由度机械臂(1)由安装臂(16)、用于驱使安装臂(16)转动的转动臂(15)、用于驱使转动臂(15)转动的第二伸展臂(14)、用于驱使第二伸展臂(14)的第一伸展臂(13)、用于驱使第一伸展臂(13)伸展的旋转臂(12)和安装箱(11)组成;所述安装臂(16)上安装有太赫兹发射源(2)和太赫兹探测器(3);所述第一光路组件(4)安装在太赫兹发射源(2)的输出端,所述第二光路组件(5)安装在太赫兹探测器(3)的接收端。2.根据权利要求1所述的基于机械臂的太赫兹反射成像系统,其特征在于,所述安装箱(11)中设有第一电机、第一同步轮(18)和第二同步轮(19);所述第一电机固定安装在安装箱(11)中,所述第一同步轮(18)固定安装在第一电机的输出轴上,所述第二同步轮(19)通过第一连接转杆转动安装在安装箱(11)的一侧,所述第一同步轮(18)和第二同步轮(19)通过第一同步带传动连接,所述旋转臂(12)固定安装在第一连接转杆的末端。3.根据权利要求2所述的基于机械臂的太赫兹反射成像系统,其特征在于,所述旋转臂(12)包括第一臂体(121)、第二双轴电机(122);所述第一臂体(121)固定安装在第一连接转杆的末端,所述第二双轴电机(122)固定安装在第一臂体(121)中,所述第二双轴电机(122)输出轴上固定安装有第三同步轮(123),所述第一臂体(121)的一端转动安装有第二连接转杆(125),所述第二连接转杆(125)的两端均固定安装有第四同步轮(124),位于所述第一臂体(121)同一侧的第三同步轮(123)和第四同步轮(124)通过第二同步带传动连接;所述第一伸展臂(13)与第二连接转杆(125)固定连接。4.根据权利要求3所述的基于机械臂的太赫兹反射成像系统,其特征在于,所述第一伸展臂(13)包括第二臂体(131)、第三双轴电机(132);所述第二臂体(131)与第二连接转杆(125)固定连接,所述第三双轴电机(132)固定安装在第二臂体(131)中,所述第三双轴电机(132)输出轴上固定安装有第五同步轮(133),所述第二臂体(131)的一端转动安装有第三连接转杆(136),所述第三连接转杆(136)的两端均固定安装有第六同步轮(134),位于所述第二臂体(131)同一侧的第五同步轮(133)和第六同步轮(134)通过第三同步带(135)传动连接;所述第二伸展臂(14)与第三连接转杆(136)固定连接。5.根据权利要求4所述的基于机械臂的太赫兹反射成像系统,其特征在于,所述第二伸展臂(14)包括第三臂体(141)、第四电机(142);所述第三臂体(141)与第三连接转杆(136)固定连接,所述第四电机(142)固定安装在第三臂体(141)中,所述第四电机(142)的输出轴上固定安装有第七同步轮,所述第三臂体(141)中转动安装有第四连接转杆(145),所述第四连接转杆(145)的末端固定安装有第八同步轮(143),所述第七同步轮和第八同步轮(143)通过第四同步带传动连接;所述第八同步轮(143)的一侧固定设有安装盘(144),所述转动臂(15)与安装盘(144)固定连接。6.根据权利要求5所述的基于机械臂的太赫兹反射成像系统,其特征在于,所述转动臂(15)包括第四臂体(151)、第五双轴电机;所述第四臂体(151)与安装盘(144)固定连接,所述第五双轴电机固定安装在第四臂体(151)中,所述第五双轴电机输出轴上固定安装有第九同步轮,所述第四臂体(151)的一端转动安装有第五连接转杆(154),所述第五连接转杆(154)的两端均固定安装有第十同步轮(152),位于所述第四臂体(151)同一侧的第九同步
轮和第十同步轮(152)通过第五同步带(153)传动连接;所述安装臂(16)与第五连接转杆(154)固定连接。7.根据权利要求6所述的基于机械臂的太赫兹反射成像系统,其特征在于,所述安装臂(16)包括连接座(161)、连接板(162);所述连接座(161)与第五连接转杆(154)固定连接,所述连接板(162)固定设在连接座(161)的一侧,所述连接板(162)上设有安装盒(6);所述安装盒(6)中开设有与连接板(162)相匹配的插接槽(65),所述连接板(162)插接在插接槽(65)中,所述安装盒(6)上旋接有用于顶紧连接板(162)的第一锁紧旋钮(7),所述太赫兹发射源(2)、太赫兹探测器(3)均固定安装在安装盒(6)中。8.根据权利要求7所述的基于机械臂的太赫兹反射成像系统,其特征在于,所述安装盒(6)中开设有用于放置太赫兹发射源(2)的第一空腔(61)和用于放置太赫兹探测器(3)的第二空腔(62),所述安装盒(6)的一侧旋接有用于顶紧太赫兹发射源(2)的第二锁紧旋钮(8)和用于顶紧太赫兹探测器(3)的第三锁紧旋钮(9)。9.根据权利要求7所述的基于机械臂的太赫兹反射成像系统,其特征在于,所述第一光路组件(4)包括准直透镜(41)、硅片(42)和第一衍射元件(43);所述太赫兹发射源(2)发射端外围的安装盒(6)上设有多个第一定位杆(63),多个所述第一定位杆(63)共同固定准直透镜(41)、硅片(42)和第一衍射元件(43)。10.根据权利要求7所述的基于机械臂的太赫兹反射成像系统,其特征在于,所述第二光路组件(5)包括聚焦透镜(51)和第二衍射元件(52);所述太赫兹探测器(3)接收端外围的安装盒(6)上设有多个第二定位杆(64),多个所述第二定位杆(64)共同固定聚焦透镜(51)和第二衍射元件(52)。
技术总结
本发明公开了基于机械臂的太赫兹反射成像系统,涉及成像系统。包括太赫兹发射源、太赫兹探测器、第一光路组件、第二光路组件;还包括一五自由度机械臂;所述五自由度机械臂由安装臂、用于驱使安装臂转动的转动臂、用于驱使转动臂转动的第二伸展臂、用于驱使第二伸展臂的第一伸展臂、用于驱使第一伸展臂伸展的旋转臂和安装箱组成;所述安装臂上安装有太赫兹发射源和太赫兹探测器;所述第一光路组件安装在太赫兹发射源的输出端,所述第二光路组件安装在太赫兹探测器的接收端。本发明实用可靠、稳定性好,能够实现不移动样品完成对样品不同方位的检测,丰富拓展太赫兹反射成像系统使用场景。景。景。
技术研发人员:牛丽婷 涂子跃 李威 韩太坤 陈万佳 朱伟桉 龙慧 覃允培 魏雪敏 陆理强
受保护的技术使用者:广东石油化工学院
技术研发日:2022.12.08
技术公布日:2023/3/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。